STRIDE: When to Speak Meets Sequence Denoising for Streaming Video Understanding
Recent progress in video large language models (Video-LLMs) has enabled strong offline reasoning over long and complex videos. However, real-world deployments increasingly require streaming perception and proactive interaction, where video frames arr…
Authors: Junho Kim, Hosu Lee, James M. Rehg
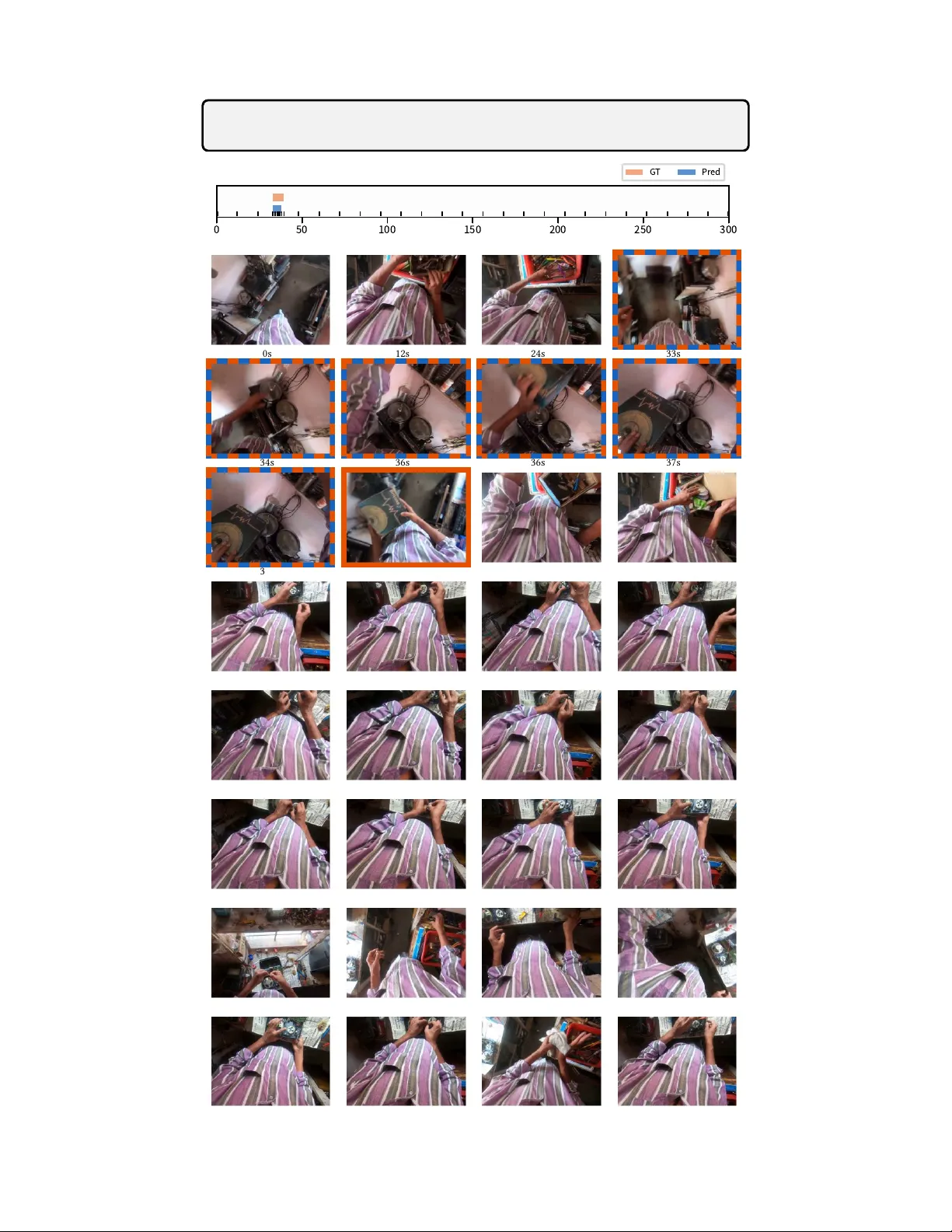
STRIDE: When to Speak Meets Sequence Denoising for S treaming Video Understanding Junho Kim 1 ∗ , Hosu L ee 2 ∗ , James M. Rehg 1 , Minsu Kim 3 †‡ , Y ong Man Ro 2 † 1 UIUC , 2 KAIST , 3 Google DeepMind ∗ Equal contribution , † Corresponding author , ‡ W ork done as an advisory role only . Recent progress in vide o large language models (Vide o-LLMs) has enabled strong oine reasoning over long and complex videos. However , real-world deployments increasingly require streaming perception and proactive interaction, where video frames arrive online and the system must decide not only what to respond, but also when to respond. In this work, we revisit proactive activation in streaming video as a structured sequence modeling problem, motivated by the observation that temporal transitions in streaming video nat- urally form span-structured activation patterns. T o capture this span-level structure, we model activation signals jointly over a sliding temporal window and up date them iteratively as new frames arrive. W e propose STRIDE (Structured T emporal Renement with Iterative DEnoising), which employs a lightweight masked diusion module at the activation interface to jointly predict and progressively rene activation signals across the window . Extensive e xperiments on diverse str eaming benchmarks and downstream models demonstrate that STRIDE shows more reliable and temporally coherent proactive responses, signicantly improving when- to-speak decision quality in online streaming scenarios. Contact: arkimjh@illinois.edu, leehosu01@kaist.ac.kr Project Page: https://interliv e-team.github.io/STRIDE Huggingface: https://huggingface.co/interlive Code: https://github .com/interlive-team/STRIDE 1 Introduction Along with recent advances in large language models (LLMs) Brown et al. ( 2020 ); T ouvron et al. ( 2023 ); OpenAI ( 2022 ); Reid et al. ( 2024 ); Y ang et al. ( 2025a ), large vision-language models (LVLMs) Li et al. ( 2023 ); Liu et al. ( 2023b ); Dai et al. ( 2023 ); Liu et al. ( 2023a ); Chen et al. ( 2023 ) have also achie ved impressive performance acr oss a wide range of image understanding and reasoning tasks. Building upon these advances, various video specialize d models ( i.e., Video-LLMs) Lin et al. ( 2023 ); Zhang et al. ( 2023 ); Kim et al. ( 2024 ); Zhang et al. ( 2024a ); Li et al. ( 2025c ) further extend them to the temporal sequences, demonstrating remarkable capabilities in reasoning over video contents. Howe ver , existing Video-LLMs mostly op erate in an oine manner , processing pre-recorded videos with access to the entire temporal context b efore generating responses. This fundamentally limits their capabilities to real-world streaming deployments such as ego centric assistants Huang et al. ( 2024c ), autonomous driving Xie et al. ( 2025 ), or embodied AI agents W ei et al. ( 2025 ), where the model must continuously perceive an ongoing video stream and decide when and what to respond in real time. Recognizing this gap, recent works have delved into streaming video understanding (SV U), where models continu- ously ingest incoming frames and maintain a temporal understanding on-the-y W ang et al. ( 2024d ); Zhang et al. ( 2025b ); Y ang et al. ( 2025c ); Ning et al. ( 2025 ); Y ao et al. ( 2025 ); Zhang et al. . Despite these advances, the approach is still reactive , lacking a capability to determine when a response should be triggered. Expanding beyond the stream- ing scope, se veral works have explored pr oactive response generation by leveraging special tokens Chen et al. ( 2024a , 2025a ); Xu et al. ( 2025 ) to implicitly learn r esponse timing or an agent-driv en interaction approach Xiong et al. ( 2025 ); Y ang et al. ( 2025b ). More recently , several standalone activation modules Qian et al. ( 2024 , 2025 ); W ang et al. ( 2025a ) have b een proposed, esp ecially those that decouple the streaming pip eline into two stages: a lightweight front-end that predicts activation signals at each frame to identify triggering moments, follo wed by a downstr eam Video-LLM that, when activated, consumes the accumulated frame cache to generate responses. Within this decomp osed framework, a straightforward way to train the activation mo dule is to treat it as a binary 1 classication problem as in Qian et al. ( 2024 , 2025 ); W ang et al. ( 2025a ), where at each time step a model predicts whether to trigger a response under binary super vision. Howev er , such approach reduces activation to point-wise 0 / 1 de cisions, answering “ should I respond now? ” at each time step, without explicitly mo deling how activation states transition across a temporal span. This often results in ickering activations and p oorly resolved transition boundaries, causing unstable triggering b ehavior and fragmente d activation spans. In practice, a reliable activation module must not only predict isolated labels, but also model how activation states change over time, capturing consistent 0 → 1 onsets, sustained 1 → 1 persistence, and well-resolved 1 → 0 osets, so as to form coherent contiguous activation spans. In this sense, streaming and proactive triggering is more analogous to a span-structured decision rather than a point-wise one. T o account for this span-level structure, an activation mo dule should jointly model the activation sequence within a temporal neighborhood, so that the downstr eam Video-LLM can be activated under well-scoped visual context (neither prematurely with insucient e vidence nor to o late after the moment has passed). Motivated by r ecent advances in masked diusion models Nie et al. ( 2025 ); Y ou et al. ( 2025 ); Li et al. ( 2025a ) (MDMs), which enable joint prediction over partially masked discrete sequences, we revisit streaming and pr oactive activation as structured sequence modeling over an activation window . Unlike point-wise decision-making, maske d diusion op- erates on an entire se quence and iteratively renes corrupted states within context, naturally aligning with the span- structure of streaming trigger . Building on this, w e propose STRIDE ( S tructured T emporal R enement with I terative DE noising), a proactive streaming frame work that models the when-to-speak decision as structured sequence predic- tion, explicitly capturing span-level structure and activation state transitions. Specically , during training, we employ boundary-aware span masking strategies that corrupt contiguous regions of the activation sequence, encouraging the model to reason about onset and oset from broader temporal context rather than relying on isolated binary signals. At inference time, as new frames arrive, STRIDE progressively updates the activation window by carr ying for ward condent states and remasking uncertain positions, enabling temporally coherent span under partial observability while remaining plug-and-play and compatible with o-the-shelf Video-LLMs. Through extensive experiments and comprehensive analyses on streaming benchmarks and downstream models, we corroborate that STRIDE produces more reliable and temporally coherent proactive responses in online settings, signicantly improving the when-to-speak decisions. Our contributions can be summarized as follows: • W e revisit proactive streaming activation in Video-LLMs and reformulate the when-to-sp eak pr oblem as struc- tured se quence mo deling over a temp oral activation window , establishing span-level activation as the predic- tion unit. • W e propose STRIDE ( S tructur ed T emp oral R enement with I terative DE noising), a lightweight masked diusion- based activation model that jointly predicts activation sequences and captures span-level structure. • W e validate STRIDE through extensive experiments on diverse streaming benchmarks and downstream back- bones, demonstrating more stable proactive triggering and impro ved temporal consistency in online settings. 2 R elated W ork 2.1 Large Vision-Language Models Early works on LVLMs Liu et al. ( 2023b ); Dai et al. ( 2023 ); Li et al. ( 2024a ) have demonstrated that visual instruction tuning, which pairs a vision enco der with a LLM backb one and trains on instruction-following data, can output strong general-purpose capabilities for back-and-forth multi-mo dal conversation. Subsequent eorts Chen et al. ( 2023 ); W ang et al. ( 2024c ); Zhu et al. ( 2025b ); W ang et al. ( 2025b ) have focused on scaling model and data, improving visual tokenization, and aligning vision and language representations at scale. Especially , Q wen families Bai et al. ( 2023 ); W ang et al. ( 2024b ); Bai et al. ( 2025b , a ) improve visual processing eciency and capability with dynamic resolution and stronger multi-mo dal pretraining, enabling more robust perception and reasoning over complex visual inputs. In addition, Video-LLMs Zhang et al. ( 2023 ); Li et al. ( 2024c ); Song et al. ( 2024 ); Zhang et al. ( 2024a ) extend its scope to temporal understanding by treating video as a sequence of images, introducing video-sp ecic connector Lin et al. ( 2023 ); Kim et al. ( 2024 ); Zhang et al. ( 2025a ) and training pipelines Li et al. ( 2024b ); Share ( 2024 ); Zhang et al. ( 2024b ) that b etter capture spatiotemporal dynamics, thereby leading to stronger p erformance on video QA and captioning 2 tasks. Despite these advances, most LVLMs remain conned to an oine setting, wher e the entire video clip is available prior to inference, limiting their applicability in r eal-time streaming scenarios. 2.2 Streaming Video Understanding A growing bo dy of works Qian et al. ( 2024 ); Zhang et al. ( 2025c ); Li et al. ( 2025b ) has explor ed e xpanding video under- standing into the str eaming regime, wher e frames arrive online and frameworks must maintain state ov er time. One line of research adapts models to streaming interaction by redesigning training objectives and data formats for contin- uous inputs Chen et al. ( 2024a ), incorporating memor y-augmented architectures for multi-turn streaming Zhang et al. ( 2025b ); Xiong et al. ( 2025 ), and leveraging real-time commentar y pipelines that integrate video spe ech transcripts with instruction tuning Chen et al. ( 2025a ); Xu et al. ( 2025 ). Another branch emphasizes eciency for unb ounded video streams through memory aggregation for long streams Zhang et al. ( 2025b ), streaming-aligned K V -cache strate- gies Xu et al. ( 2025 ); Ning et al. ( 2025 ); Y ang et al. ( 2025c ), and redundant visual token dropping based on inter-frame similarity Y ao et al. ( 2025 ). While these approaches have enabled Video-LLMs to process continuous streams, they remain fundamentally reactive , generating r esponses only upon instantaneous user queries. Addressing this gap, another direction tackles the proactive response , which targets deciding when to respond as the video unfolds. Several approaches exploit EOS token within autoregressive generation to implicitly determine re- sponse timing Chen et al. ( 2024a ); Xu et al. ( 2025 ), conating the triggering with language generation. Agentic methods explicitly model task-relevant temp oral inter vals for goal-driven triggering Y ang et al. ( 2025b ), or quer y- aware visual pruning with proactive response mechanisms Zhang et al. . Most relevant to our work, recent mo dular approaches Qian et al. ( 2024 , 2025 ); W ang et al. ( 2025a , 2024d ) explicitly de couple the pip eline into a lightweight front- end that predicts per-frame binar y activation signals and a downstream Vide o-LLM that generates responses upon triggering. While such a modular design pr eserves the downstream Video-LLM’s capabilities, reducing activation to point-wise binar y super vision undermines the temporal coherence of contiguous activation spans. In this work, we retain the modular design while recasting activation as a structured sequence prediction problem, leveraging masked diusion to jointly model activation sequences over a temporal window and capture span-level temporal coherence . 2.3 Discrete Diffusion Language Models Recent progress in discrete diusion language models (dLLMs) Nie et al. ( 2025 ); Sahoo et al. ( 2024 ); Lou et al. ( 2023 ) revisits diusion as an alternative to autoregressive decoding for text generation using masked diusion models mechanism. Instead of generating tokens strictly left-to-right, dLLMs iteratively denoise masked token sequences, enabling bidirectional conditioning and parallel token updates, which naturally supp orts controllable generation. Subsequent eorts have further scaled dLLMs by converting pretrained autoregressive models into diusion-base d counterparts Gong et al. ( 2024 ); Y e et al. ( 2025 ), and improved their alignment and inference eciency through parallel decoding strategies Chen et al. ( 2025b ). Espe cially , LLaDA series scale maske d diusion to large LLMs Nie et al. ( 2025 ) and further explores post-training alignment Zhu et al. ( 2025a ) as well as system-level scaling by converting pretrained AR models into diusion models Bie et al. ( 2025 ), thereby inheriting knowledge while retaining the non- autoregressive generation b enets. This research scop e has also been extended to the multi-modal setting, where vision encoders are coupled with diusion language backb ones for visual instruction following Li et al. ( 2025a ); Y ou et al. ( 2025 ); Yu et al. ( 2025 ); Cheng et al. ( 2025 ), demonstrating that dLLMs can benet from parallel deco ding and bidirectional reasoning in vision-language tasks. Dierent from these works that primarily replace the autoregressiv e decoder for textual response generation, our w ork leverages maske d diusion for proactiv e streaming activation. W e treat the when-to-sp eak signal as a structured discrete activation se quence over a temporal window , jointly predicting the activation states for the incoming video streams. 3 Proposed Method 3.0.1 Preliminaries: Mask ed Diffusion Models. Recently , diusion language models (dLLMs) Nie et al. ( 2025 ); Zhu et al. ( 2025a ); Li et al. ( 2025a ); Y ou et al. ( 2025 ) have shown remarkable progress as an alternative paradigm to autoregressiv e language modeling, replacing left-to- right token generation with a masked diusion process that iteratively denoises discrete token se quences. Given a sequence of L tokens x 0 = ( x 1 0 , . . . , x L 0 ) , the forward process progressiv ely corrupts x 0 by independently replacing 3 Downs tream Video - LLM Streaming Question Act. Token Streaming Re sp on ses The6chef6pours6o il6into6the6pa n6and6 turns6on6th e6stove6to6sta rt6cooking . Incoming Fra mes Activa tion Model Query Token Visual To ken F rame Cache What%dish%is%being% prepare d,%and%what% are%the%key%step s? Seq. Denoising 𝑣 1 0 2 Video Stream 𝑣 1 𝑣 1 0 , 𝑣 1 0 , Tra i ni n g : Masked Denoising Process (@ 𝑇 # ) 𝑡 = 1 𝑡 = 0 𝒱 23 3 𝑎 [3 3 78 9∶93 3 ] 𝑞 The6chef6sears6 seafood6in6sp iced6oil,6 building 6the6base . Broth,6okra,6and6thyme6are6added.6It’s6a6 Creole - style6seafoo d6stew. 𝑇 # Mask Token only if: active 0 1 0 0 1 1 0 1 1 [Mask] 0 0 [Mask] [Mask] [Mask] [Mask] [Mask] [Mask] 0 1 1 [Mask] 0 [Mask] [Mask] [Mask] [Mask] [Mask] 0 [Mask] 0 0 [Mask] [Mask] [Mask] [Mask] Accumulated Frames Cached Frames Clean - up STRID E MDM: avg. of unmasking lo ss active inactive or 𝑎 + , 𝑎 + . 𝑎 + / 𝑎 + -0, 𝑎 + - 1 [Mask] 0 [Mask] [Mask] 0 Act. Model 𝝅 [01:49] [03:08] [04:34] Visual Ca che Act. Region [ 00:00] 𝑣 6 Proactive Trigger Time Activation Decision 𝐴 - 𝐴 . 𝐴 / Figure 1 Overview of STRIDE , which operates in a streaming setting where frames arrive online. A lightweight activation model based on masked diusion maintains an activation region over a sliding temporal window and iteratively denoises masked activation states to predict a coherent trigger segment. A trigger is issued only if an active span is sustained for a predened span ratio. When activation is triggered, the accumulated frame context is forwarded to a downstream Video-LLM to generate the response. each token with a mask token [M] with probability t ∈ [0 , 1] , generating a partially masked sequence x t . At t = 0 the sequence is fully observed, while at t = 1 it is entirely masked. The core of MDMs is a mask predictor p θ ( · | x t ) with bidirectional attention that takes x t as input and predicts all masked tokens simultaneously . The reverse pr ocess Austin et al. ( 2021 ); Shi et al. ( 2024 ); Sahoo et al. ( 2024 ) recovers x 0 from x t by iteratively applying this mask predictor , which is trained by minimizing a cross-entropy loss computed only over the masked positions: L ( θ ) = − E t, x 0 , x t " 1 t L X i =1 1 [ x i t = M ] log p θ ( x i 0 | x t ) # , (1) where t ∼ U [0 , 1] and x t is sampled from the for ward process. This ser ves as an upper b ound on the negative log-likelihood of the model distribution Nie et al. ( 2025 ); Bie et al. ( 2025 ). At inference, generation proceeds by initializing a fully masked sequence x 1 and simulating the reverse process through K discrete steps decreasing from t = 1 → 0 . At each step, the mask pr edictor predicts all masked positions, and a subset of predictions is accepted while the remaining positions are remasked for subsequent renement. This iterative predict-and-rene proce dure enables MDMs to generate coherent sequences through progressive unmasking with bidirectional context. 3.1 STRIDE: Proactive Streaming F ramework 3.1.1 Problem F ormulation. The proposed STRIDE (shown in gure 1 ) considers the streaming vide o understanding setting where a model con- tinuously processes video streams V = { v 1 , v 2 , . . . , v T , . . . } with v T denoting the incoming visual frame arriving at time step T , interleaved with user queries and model-generated responses o ver time . Unlike oine Video-LLMs that have access to the holistic video se quences before generating a response, a streaming model must work under partial observability , where only the frames observed so far V ≤ T = { v 1 , . . . , v T } and context priors C T ( e.g., user query q and prior interaction history) are available. At ev ery time step T , the mo del faces two sequential decisions: (i) whether to respond, and (ii) if so , what to respond. STRIDE adopts a two-stage streaming framework to decouple these decisions. 3.1.2 T w o-Stag e Architecture. As illustrated in gure 1 , STRIDE is designed with the two-stage streaming framework. A lightweight Activation Model π continuously monitors the incoming stream and determines whether a proactive response should be triggered. Once 4 Left - Context (Causal) 𝒂 Ta r g e t ( B i d i re c t i o n a l ) 𝒂 ! Copy Sequence Duplica tion (a) Boundary - Anchor ed Masking (b) Span Unmasking (c) Full Masking Masking Stra tegies 0 1 1 1 0 0 0 0 0 1 1 1 0 1 1 1 0 0 0 1 1 1 0 0 1 1 1 0 0 0 [M] [M] [M] 1 1 [M] 1 [M] [M] [M] [M] [M] [M] [M] Activation Boundary Masks Boundary Transition 1 Revealed Homogeneo us Region Mimic Unmasking Patterns Global Act ivation Layo ut / Cold St art Corrupted Input ( 𝑎 " ) Corrupted Input ( 𝑎 " ) Corrupted Input ( 𝑎 " ) GT ( 𝑎 ! ) GT ( 𝑎 ! ) GT ( 𝑎 ! ) [M] 1 [M] 0 1 1 0 0 1 0 0 1 [M] 0 0 1 Denoised St ate at Time 𝑇 Activa tion Window Shift at 𝑇 +1 Ev i c t i o n Co n f i d e n c e Re te n t i o n ( 𝜏 ) (N e w ) Vi de o F r a m e 𝑣 ! " # 0 [M] 1 [M] Selective Re - masking Progressive Denoisi ng ( 𝐾 steps) 0 [M] 1 [M] [M] 0 1 0 [M] 1 0 0 0 0 1 1 1 Frame Cache User Query 𝑡 =0 𝑡 =1 Inference Stag e of STR IDE 1 Next Selective Re - maski ng Denoising Re - mask Keep stat e 0 0 1 1 @ 𝑇 @ 𝑇 +1 @ 𝑇 @ 𝑇 +1 0 [M] 0 Figure 2 A ctivation modeling and inference stage of STRIDE . Training applies sequence duplication and three masking strategies (boundar y-anchored masking, span unmasking, full masking). During inference, the activation window slides with incoming frames, retaining condent past decisions while selectively re-masking and progressiv ely denoising uncertain positions. a response is triggered at time step T , the accumulated visual context since the most recent quer y time T q , denoted V [ T q : T ] , together with the interaction context C T , is for warded to a downstream Vide o-LLM, which generates the response R T = f ( C T , V [ T q : T ] ) . The generated response R T is appende d to the interaction context, updating it to C T ′ = C T ∪ R T , enabling awareness of prior responses and maintaining dialogue coherence across multiple activation events. After each triggered response, the visual accumulation is cleared and restarted from the current time step, ensuring that subse quent activation decisions operate on fresh streaming context. This mo dular design cleanly separates when-to-speak modeling from downstream response generation. 3.1.3 Span-L ev el Activ ation Modeling. T o formalize the activation decision, we represent activation as a window-level sequence of size W anchored at time step T , and model it as a sequence-level prediction over this temp oral window . Specically , we dene an activation region a T = [ a T − W , . . . , a T ] ∈ { 0 , 1 } W , indicating inactive or active states within the window . This windowed formulation enables the activation model to learn contiguous activation spans and their transition dynamics ( 0 → 1 onset, 1 → 1 persistence, 1 → 0 oset), aligning the prediction unit with span-level structures rather than isolated point-wise decisions. As the video stream unfolds, incoming frames are sampled at 1 FPS and encoded into visual tokens by a vision encoder , which are accumulated in a running visual cache. At each time step T , the activation region a T is app ended after the visual cache as the prediction target. Each activation token takes values from the discrete v ocabular y { 0 , 1 , [M] } , where [M] denotes masked positions to b e denoised. The activation model conditions on the visual cache and jointly infers masked activation states within the temporal window . When the activation state is determined to be active un- der the span-based criterion, the accumulate d visual context is for warded to the downstream Video-LLM for response generation. 3.2 T raining: A ctivation as Sequence Denoising 3.2.1 Structured Masking Strategies for Activ ation Denoising. T o train the activation model under the structured formulation, we propose a mixture of three corruption strategies instead of the standard MDM Nie et al. ( 2025 ), which samples mask positions independently . Such masking is inap- propriate for our activation learning as the target sequence consists of contiguous active regions; isolated unmasked tokens between active positions make the denoising task trivially solvable through local interpolation, bypassing the need for genuine temporal understanding. The proposed masking mixture shown in gure 2 (left) is composed of: • Boundary-Anchored Span Masking masks a contiguous blo ck overlapping with at least one activation b oundary , forcing the model to determine where the active region begins and ends from br oader temporal context. 5 • Span Unmasking starts from a fully masked sequence and rev eals a contiguous blo ck while keeping boundary- adjacent p ositions masked, mimicking the inference-time pattern where high-condence tokens are unmasked consecutively in homogeneous regions. • F ull Masking initially masks the entire activation se quence (cold-start) to stabilize the reverse step by training the model to estimate the global activation layout from visual context alone . During training, each sample is randomly corrupted using one of three structured masking strategies, each selected with equal probability . These structured strategies encourage the model to reason over contiguous activation spans and their boundar y transitions, rather than relying on isolate d token predictions. As a result, the activation module learns span-level consistency that better aligns with the sequential and partial observability of streaming proactive triggering. 3.2.2 Reco v ering Bidirectional Conditioning with Sequence Duplication. Ma-sked diusion predicts masked p ositions using full-sequence context, whereas an AR-pretrained activation mo del is trained with causal attention that only exposes left context. W e therefore introduce an input reparameterization that enables bidirectional conditioning without altering the underlying causal attention layers. Spe cically , we em- ploy sequence duplication , app ending a copy of the activation region to form [ a , a ′ ] , where the copy carry identical activation tokens but serve distinct roles. The duplicated se quence a ′ produces diusion predictions, while a serves as a conditioning pr ex under causal attention. Concretely , since a is entirely placed before a ′ , every token in a ′ can access all p ositions of a as left-context, providing full-window visibility for denoising without modifying the causal attention mask. 3.2.3 T raining Objective . Following the denoising process in equation (1) , we train the activation module by minimizing the masked cross- entropy loss ov er a ′ , conditioned on the user query q and the visual cache V ≤ T : L ( θ ) = − E t, a ′ 0 , a ′ t 1 t W X j =1 1 [ a ′ j t = M ] log p θ ( a ′ j 0 | q , V ≤ t , a ′ t ) , (2) where a ′ 0 is the gr ound-truth activation sequence, a ′ t is obtained by applying aforementioned our masking strategies at noise level t ∼ U [0 , 1] , and the user quer y q along with the visual cache V ≤ t serves as a xed conditioning prex, analogous to the prompt in the supervised ne-tuning of dLLMs Nie et al. ( 2025 ); Li et al. ( 2025a ). 3.3 Inference: Streaming as Progressive Unmasking At inference time , STRIDE maintains a sliding activation window and performs progressiv e renement as illustrated in gur e 2 (right); condent past decisions are preserved, while uncertain and newly introduced positions are jointly rened with masked diusion. Concretely , new time step T + 1 proce eds in two stages: (i) Selective Re-masking: The activation sequence of size W is shifted for ward so that the region falling outside the window is evicted and a new frame is appende d, causing the activation se quence to advance in time. The fully resolved activation a j +1 T previously assigned to position j + 1 at time T now maps to position j at time T + 1 . T o determine whether each carried-forward decision r emains reasonable given the new visual evidence v T +1 , we apply a condence-based retention: if p θ ( a j T +1 = a j +1 T | q , V ≤ T +1 , a T +1 ) > τ , position j inherits its previous decision; otherwise, it is re-masked to [M] so that uncertain positions re-enter the denoising process alongside the newly appended slots. (ii) K -Step Progressive Denoising: The masked positions obtained from the previous stage, comprising both newly ap- pended slots and low-condence re-masked slots, are resolved over K denoising steps by prioritizing high-condence positions rst. At each step, the model computes the activation probability p j = p θ ( a j = 1 | q , V ≤ T +1 , a T +1 ) for ev- ery maske d position and derives a condence score c j = max( p j , 1 − p j ) , which measures how strongly the prediction leans toward either triggering or not. The top- k positions ranked by c j are unmasked, wher e k = ⌈ N init /K ⌉ and N init is the number of masked positions established in stage (i), while the rest remain masked for subse quent renement. 6 By revealing high-condence decisions rst, this schedule establishes reliable temporal anchors that progressively stabilize the remaining ambiguous boundary regions. After K steps, the activation window is fully resolved. A trigger at time T + 1 is issued only if an active span is sustained for at least γ consecutive positions, where γ denotes the required span ratio for triggering. 4 Experiments 4.1 Experimental Setting 4.1.1 Implementation & T raining Details. The activation model is initialize d from a compact vision-language model using Qwen3- VL-2B Bai et al. ( 2025a ) to minimize streaming overhead. The downstream Video-LLMs are kept frozen, ensuring full modularity between the two stages. Incoming video frames are sampled at 1 FPS and encoded into the visual cache as the stream progresses. For the denoising process, we adopt the low-condence remasking strategy Nie et al. ( 2025 ) with K =8 sampling steps during inference. τ is set to 0.75, and γ is set to 1 following the benchmark evaluation protocol. The entire activation model is trained on a single node of 8 NVIDIA H100 GP Us, while evaluation is conducted on a single H100 GP U. Comprehensive hyperparameter settings and additional congurations are pr ovided in the Appendix. For the training data, we curate a diverse collection of temporally annotated video datasets spanning multiple video understanding tasks, including dense video captioning Caba Heilbron et al. ( 2015 ); Liu et al. ( 2024b ); Huang et al. ( 2024b ), temporal activity detection Sigurdsson et al. ( 2016 , 2018 ), grounded video Q A W ang et al. ( 2024a ), sequential step r ecognition Zhou et al. ( 2018 ), and moment localization Anne Hendricks et al. ( 2017 ). W e convert each temporal annotation into a binary activation se quence aligne d with the frame sampling rate, where frames within annotated spans are labeled as active ( 1 ) and the remaining frames as inactive ( 0 ). 4.1.2 Benchmarks & Baselines. W e evaluate STRIDE on three complementar y benchmarks. O V O-Bench Niu et al. ( 2025 ) assesses online video un- derstanding across backward tracing, real-time visual perception, and forward active responding, where the model must delay its response until sucient future evidence is available. StreamingBench Lin et al. ( 2024b ) evaluates streaming comprehension through 18 tasks spanning real-time visual understanding, omni-source understanding, and contextual understanding including proactive output and sequential question answering. In addition, we evalu- ate on subsets of ET -Bench Liu et al. ( 2024b ), including T emporal Video Grounding (T V G), Episodic Memory (EPM), T emporal Action Localization (T AL), Dense Video Captioning (D VC), and Step Localization and Captioning (SLC). This setup evaluates activation timing precision by measuring how accurately the model identies event boundaries. For baselines, we compare against various oine Video-LLMs, online streaming proactive models Chen et al. ( 2024a ); Qian et al. ( 2025 ); W ang et al. ( 2025a ), and proprietary models Reid et al. ( 2024 ); OpenAI ( 2024 ). In addition, we include Baseline- AR , which ser ves as the primary counterpart to STRIDE . Baseline- AR follows the same architec- ture and training setup as our method but replaces the masked diusion activation module with an autoregressive binary prediction head trained with BCE loss, following the activation formulation described in prior work W ang et al. ( 2025a ). This setup isolates the activation modeling strategy , enabling a direct comparison between masked denoising and autoregressive binary prediction. 4.2 Qualitativ e Results on Streaming Video Understanding tables 1 and 2 present results on O VO-Bench and StreamingBench, respectively . The proposed STRIDE outperforms the autoregressiv e baseline (i.e., Baseline-AR) W ang et al. ( 2025a ) by introducing the proposed maske d denoising process. Furthermore, across all three downstream mo dels T eam et al. ( 2025 ); W ang et al. ( 2025b ); Bai et al. ( 2025a ) on O VO-Bench, STRIDE achieves signicant gains in For ward Active Resp onding, which dir ectly evaluates proactive when-to-speak control. This setting b enets from our span-structured prediction, which mo dels response timing over temporal activation region rather than through independent per-frame decisions. STRIDE also consistently improves Real- Time Visual Perception, indicating that stable triggering allo ws the do wnstream Video-LLM to ingest well-scoped visual context at the appropriate moment. On StreamingBench, this advantage extends broadly across all 7 T able 1 Evaluation results on O VO-Bench Niu et al. ( 2025 ). Baseline- AR uses autoregressive binary prediction. Oine models follow the original single-turn protocol with segmented clips, whereas streaming methods process frames sequentially . Method # of Frames Real- Time Visual P erception Backward Tracing F orward Act. Responding Overall OCR ACR A TR STU FPD OJR A vg. EPM ASI HLD A vg. REC SSR CRR Avg. A vg. Human Human - 93.96 92.57 94.83 92.70 91.09 94.02 93.20 92.59 93.02 91.37 92.33 95.48 89.67 93.56 92.90 92.81 Proprietary Models (Oine), Single-T urn Evaluation Gemini 1.5 Pro Reid et al. ( 2024 ) 1 FPS 85.91 66.97 79.31 58.43 63.37 61.96 69.32 58.59 76.35 52.64 62.54 35.53 74.24 61.67 57.15 63.00 GPT -4o OpenAI ( 2024 ) 64 69.80 64.22 71.55 51.12 70.30 59.78 64.46 57.91 75.68 48.66 60.75 27.58 73.21 59.40 53.40 59.54 Open-Source Models (Oine), Single-T urn Evaluation LLaV A- Vide o-7B Zhang et al. ( 2024b ) 64 69.13 58.72 68.83 49.44 74.26 59.78 63.52 56.23 57.43 7.53 40.40 34.10 69.95 60.42 54.82 52.91 LLaV A-OV -7B Li et al. ( 2024a ) 64 66.44 57.80 73.28 53.37 71.29 61.96 64.02 54.21 55.41 21.51 43.71 25.64 67.09 58.75 50.50 52.74 LLaV A-N- Vide o-7B Li et al. ( 2024b ) 64 69.80 59.60 66.40 50.60 72.30 61.40 63.30 51.20 64.20 9.70 41.70 34.10 67.60 60.80 54.20 53.10 Qwen2- VL-7B W ang et al. ( 2024b ) 64 60.40 50.46 56.03 47.19 66.34 55.43 55.98 47.81 35.48 56.08 46.46 31.66 65.82 48.75 48.74 50.39 InternVL- V2-8B Chen et al. ( 2024b ) 64 67.11 60.55 63.79 46.07 68.32 56.52 60.39 48.15 57.43 24.73 43.44 26.50 59.14 54.14 46.60 50.15 LongVU-7B Shen et al. ( 2024 ) 1 FPS 55.70 49.50 59.50 48.30 68.30 63.00 57.40 43.10 66.20 9.10 39.50 16.60 69.00 60.00 48.50 48.50 Open-Source Models (Streaming) Flash-VStr eam-7B Zhang et al. ( 2025b ) 1 FPS 24.16 29.36 28.45 33.71 25.74 28.80 28.37 39.06 37.16 5.91 27.38 8.02 67.25 60.00 45.09 33.61 VideoLLM-Online-8B Chen et al. ( 2024a ) 2 FPS 8.05 23.85 12.07 14.04 45.54 21.20 20.79 22.22 18.80 12.18 17.73 - - - - - VideoLLM-Eye WO Zhang et al. ( 2025c ) 1 FPS 24.16 27.52 31.89 32.58 44.55 35.87 32.76 39.06 38.51 6.45 28.00 - - - - - Dispider Qian et al. ( 2025 ) 1 FPS 57.72 49.54 62.07 44.94 61.39 51.63 54.55 48.48 55.41 4.30 36.06 18.05 37.36 48.75 34.72 41.78 TimeChat-Online-7B Y ao et al. ( 2025 ) 1 FPS 69.80 48.60 64.70 44.90 68.30 55.40 58.60 53.90 62.80 9.10 42.00 32.50 36.50 40.00 36.40 45.60 StreamAgent-7B Y ang et al. ( 2025b ) 1 FPS 71.20 53.20 63.60 53.90 67.30 58.70 61.30 54.80 58.10 25.80 41.70 35.90 48.40 52.00 45.40 49.40 QueryStream-7B Zhang et al. 1 FPS 74.50 47.70 70.70 46.60 71.30 57.60 61.40 54.20 63.50 8.60 42.10 33.20 43.10 40.80 39.03 47.51 Oine Backbones → Online Inference with STRIDE Qwen3- VL-8B Bai et al. ( 2025a ) 1 FPS 69.80 59.60 73.30 57.30 71.30 58.70 65.00 55.60 63.50 12.90 44.00 37.70 60.80 40.40 46.30 51.77 + Baseline-AR W ang et al. ( 2025a ) 1 FPS 73.80 65.10 73.30 62.40 70.30 71.20 69.35 54.90 66.90 17.20 46.33 29.70 56.00 42.50 42.73 52.81 Gemma3-4B T eam et al. ( 2025 ) 1 FPS 65.80 48.60 56.00 36.00 66.30 50.00 53.78 44.40 41.90 3.20 29.83 14.40 61.40 52.50 42.77 42.13 + STRIDE 1 FPS 73.20 60.60 64.70 39.30 71.30 56.50 60.93 47.80 52.00 4.80 34.87 42.60 64.60 60.00 55.73 50.51 InternVL3-8B W ang et al. ( 2025b ) 1 FPS 65.80 52.30 68.10 51.10 71.30 62.00 61.77 58.90 66.90 9.70 45.17 36.60 64.10 43.30 48.00 51.64 + STRIDE 1 FPS 75.80 54.10 80.20 56.70 74.30 65.20 67.72 58.90 65.50 11.30 45.23 40.10 67.70 66.20 58.00 56.98 Qwen3- VL-8B Bai et al. ( 2025a ) 1 FPS 69.80 59.60 73.30 57.30 71.30 58.70 65.00 55.60 63.50 12.90 44.00 37.70 60.80 40.40 46.30 51.77 + STRIDE 1 FPS 76.50 64.20 79.30 61.20 73.30 63.60 69.68 57.20 72.30 14.00 47.83 46.40 63.10 69.60 59.70 59.07 three evaluation dimensions: Real-time Visual Understanding, Omni-Source Understanding, and Contextual Under- standing, with the most notable improvements in Proactive Output (PO) subtask that requires the model to determine response timing without explicit timing cue. T ogether , these results suggest that the proposed framework reliably enhances both the precision of when to respond and the relevance of responses acr oss diverse streaming conditions. 4.3 Activ ation E valuation via T emporal Grounding Accurate temporal grounding is central to pr oactive activation. While the pr evious benchmarks Niu et al. ( 2025 ); Lin et al. ( 2024b ) evaluate the end-to-end behavior of streaming pipelines, they do not directly measure the quality of the activation model itself. T o isolate this component, we e valuate the activation model independently on ET -Bench Liu et al. ( 2024b ), which focuses on ne-grained event-lev el temporal understanding. As shown in table 3 , the gain from replacing binary classication with masked diusion is substantial: STRIDE outperforms Baseline-AR by 27.1 on T V G and 8.3 on av erage, demonstrating that structured sequence denoising provides considerably sharper boundary reso- lution than per-frame super vision. Notably , STRIDE achieves these results with only 2B parameters, outp erforming both streaming baselines and temp oral-localization sp ecialized MLLMs of standard size (7–13B parameters) on the overall average . 4.4 Ablation Studies on STRIDE Components 4.4.1 Effects of Masking Strategies. table 4 (a) evaluates how dierent masking strategies aect the learning of span-structured activation sequences. The standard MDM protocol independent masking p erforms the worst across all metrics, indicating that activation prediction cannot be treated as independent point-wise denoising since it fails to capture the temporal structure of activation transitions. T o better reect the span-level nature of activation, we adopt three complementary masking patterns described in section 3.2 : boundar y-anchored span masking (Span), full masking (Full), and span unmasking (Span). Span masks contiguous regions near activation b oundaries, Full masks the entire sequence to simulate the cold-start condition, and Span exposes boundar y renement patterns encountered during denoising. Combining these strategies signicantly improv es performance, suggesting that diverse span corruption patterns help the model learn coherent activation spans for better boundar y prediction. 8 T able 2 Evaluation results on StreamingBench Lin et al. ( 2024b ). Baseline-AR uses autoregr essive binary prediction. Oine models follow the original single-turn protocol with segmented clips, whereas streaming methods process frames sequentially . Method # of Frames Real- Time Visual Understanding Omni-Source Understanding Contextual Understanding Overall OP CR CS ATP EU TR PR SU ACP CT Avg. ER SCU SD MA A vg. ACU MCU SQA PO A vg. A vg. Human Human - 89.47 92.00 93.60 91.47 95.65 92.52 88.00 88.75 89.74 91.30 91.46 88.00 88.24 93.60 90.27 90.26 88.80 90.40 95.00 100 93.55 91.66 Proprietary Models (Oine) Gemini 1.5 pro Reid et al. ( 2024 ) 1 FPS 79.02 80.47 83.54 79.67 80.00 84.74 77.78 64.23 71.95 48.70 75.69 46.80 39.60 74.90 80.00 60.22 51.41 40.73 54.80 45.10 48.73 67.07 GPT -4o OpenAI ( 2024 ) 64 77.11 80.47 83.91 76.47 70.19 83.80 66.67 62.19 69.12 49.22 73.28 41.20 37.20 43.60 56.00 44.50 41.20 38.40 32.80 56.86 38.70 60.15 Open-Source Models (Oine) LLaV A-OV-7B Li et al. ( 2024a ) 32 80.38 74.22 76.03 80.72 72.67 71.65 67.59 65.45 65.72 45.08 71.12 40.80 37.20 33.60 44.80 38.40 35.60 36.00 27.27 29.55 32.74 56.36 Qwen2- VL-7B Wang et al. ( 2024b ) 1 FPS 75.20 82.81 73.19 77.45 68.32 71.03 72.22 61.19 61.47 46.11 69.04 41.20 22.00 32.80 43.60 34.90 31.20 26.00 39.60 22.73 31.66 54.14 MiniCPM- V 2.6 8B Yao et al. ( 2024 ) 32 71.93 71.09 77.92 75.82 64.60 65.73 70.37 56.10 62.32 53.37 67.44 40.80 24.00 34.00 41.20 35.00 34.00 31.60 41.92 22.22 34.97 53.85 InternVL- V2-8B Chen et al. ( 2024b ) 16 68.12 60.94 69.40 77.12 67.70 62.93 59.26 53.25 54.96 56.48 63.72 37.60 26.40 37.20 42.00 35.80 32.00 31.20 32.32 40.91 32.42 51.40 Kangaroo-7B Liu et al. ( 2024a ) 64 71.12 84.38 70.66 73.20 67.08 61.68 56.48 55.69 62.04 38.86 64.60 37.60 31.20 28.80 39.20 34.20 32.80 26.40 33.84 16.00 30.06 51.10 LongV A-7B Zhang et al. ( 2024a ) 128 70.03 63.28 61.20 70.92 62.73 59.50 61.11 53.66 54.67 34.72 59.96 39.60 32.40 28.00 41.60 35.40 32.80 29.60 30.30 15.91 29.95 48.66 VILA-1.5-8B Lin et al. ( 2024a ) 14 53.68 49.22 70.98 56.86 53.42 53.89 54.63 48.78 50.14 17.62 52.32 41.60 26.40 28.40 36.00 33.10 26.80 34.00 23.23 17.65 27.35 43.20 Video-LLaMA2-7B Cheng et al. ( 2024 ) 32 55.86 55.47 57.41 58.17 52.80 43.61 39.81 42.68 45.61 35.23 49.52 30.40 32.40 30.40 36.00 32.40 24.80 26.80 18.67 0.00 21.93 40.40 Open-Source Models (Streaming) Flash-VStream-7B Zhang et al. ( 2025b ) 1 FPS 25.89 43.57 24.91 23.87 27.33 13.08 18.52 25.20 23.87 48.70 23.23 25.91 24.90 25.60 28.40 26.00 24.80 25.20 26.80 1.96 24.12 24.04 VideoLLM-Online-8B Chen et al. ( 2024a ) 2 FPS 39.07 40.06 34.49 31.05 45.54 32.40 31.48 34.16 42.49 27.89 35.99 31.20 26.51 24.10 32.00 28.45 24.19 29.20 30.80 3.92 26.55 32.48 Dispider Qian et al. ( 2025 ) 1 FPS 74.92 75.53 74.10 73.08 74.44 59.92 76.14 62.91 62.16 45.80 67.63 35.46 25.26 38.57 43.34 35.66 39.62 27.65 34.80 25.34 33.61 53.12 StreamAgent Y ang et al. ( 2025b ) 1 FPS 79.63 78.31 79.28 75.87 74.74 76.92 82.94 66.31 73.69 55.40 74.31 35.86 26.26 38.87 44.04 36.26 39.72 30.25 39.60 28.90 34.62 57.02 TimeChat-Online-7B Y ao et al. ( 2025 ) 1 FPS 80.80 79.70 80.80 83.30 74.80 78.80 78.70 64.20 68.80 58.00 75.28 - - - - - - - - - - - QueryStream-7B Zhang et al. 1 FPS 82.11 83.59 78.23 82.69 75.47 80.06 79.63 63.01 67.90 42.55 74.04 - - - - - - - - - - - Oine Backbones → Online Inference with STRIDE Qwen3- VL-8B Bai et al. ( 2025a ) 1 FPS 62.70 68.00 69.70 53.30 67.50 65.10 67.60 48.00 68.00 40.90 60.88 36.80 18.00 32.80 34.00 30.40 25.60 23.60 31.20 32.40 28.20 46.84 + Baseline-AR W ang et al. ( 2025a ) 1 FPS 79.00 72.70 85.50 70.80 73.30 76.60 81.50 63.40 80.70 44.60 73.79 45.20 29.20 35.20 35.20 36.20 35.60 37.20 48.40 24.30 36.38 57.12 Gemma3-4B T eam et al. ( 2025 ) 1 FPS 63.80 69.50 68.80 54.40 60.20 65.10 59.30 40.70 62.70 21.80 57.49 28.80 31.20 30.40 46.40 34.20 34.40 31.20 38.80 12.40 29.20 46.03 + STRIDE 1 FPS 66.80 71.90 66.60 57.20 66.50 70.70 60.20 43.10 65.00 23.80 60.00 35.60 31.60 36.00 44.00 36.80 33.60 35.20 44.80 41.60 38.80 50.14 InternVL3-8B W ang et al. ( 2025b ) 1 FPS 74.90 82.00 75.70 61.20 72.00 67.60 74.10 66.70 78.10 34.20 68.71 40.40 27.60 38.80 45.60 38.10 38.00 26.00 36.80 31.20 33.00 53.97 + STRIDE 1 FPS 74.90 78.90 76.70 68.60 77.00 77.30 77.80 71.50 83.00 33.20 72.45 39.60 22.40 44.00 50.80 39.20 34.00 35.20 43.20 42.80 38.80 57.58 Qwen3- VL-8B Bai et al. ( 2025a ) 1 FPS 62.70 68.00 69.70 53.30 67.50 65.10 67.60 48.00 68.00 40.90 60.88 36.80 18.00 32.80 34.00 30.40 25.60 23.60 31.20 32.40 28.20 46.84 + STRIDE 1 FPS 77.10 75.00 77.30 72.80 76.40 77.90 76.90 69.90 84.30 46.10 74.24 42.80 24.00 45.20 53.20 41.30 32.00 38.40 46.40 42.80 39.90 59.29 T able 3 Online activation accuracy on ET -Bench Liu et al. ( 2024b ). The Baseline- AR uses autoregressive pr ediction, while other setups are the same as STRIDE . Frames Params TVG F1 EPM F1 T AL F1 DVC F1 SLC F1 A vg T emporal-Localization Specialized MLLMs VTimeLLM Huang et al. ( 2024a ) 100 7B 7.6 1.9 18.2 12.4 8.7 9.8 VTG-LLM Guo et al. ( 2025 ) 96 7B 15.9 3.7 14.4 40.2 20.8 19.0 TimeChat Ren et al. ( 2024 ) 96 7B 26.2 3.9 10.1 16.6 5.6 12.5 LITA Huang et al. ( 2024b ) 100 13B 22.2 4.6 18.0 39.7 21.0 21.1 ETChat Liu et al. ( 2024b ) 1 FPS 5B 38.6 10.2 30.8 38.4 24.4 28.5 Streaming Baselines VideoLLM-Online Chen et al. ( 2024a ) 2 FPS 8B 13.2 3.8 9.1 24.0 9.9 12.0 Dispider Qian et al. ( 2025 ) 1 FPS 9B 36.1 15.5 27.3 33.8 18.8 26.3 StreamBridge W ang et al. ( 2025a ) 1 FPS 8B 34.3 – 24.3 38.3 22.6 – Baseline-AR Wang et al. ( 2025a ) 1 FPS 2B 35.7 2.5 21.2 39.6 22.6 24.3 STRIDE 1 FPS 2B 62.8 10.7 24.6 36.5 28.5 32.6 T able 4 Ablation studies on ET -Bench evaluating (a) masking strategy design, (b) sequence duplication, and (c) selective re-masking. TVG F1 EPM F1 T AL F1 DVC F1 SLC F1 A vg (a) Masking Strategy Indep. only 8.5 3.3 6.1 8.8 9.2 7.2 Span only 30.6 6.1 22.9 25.4 20.6 21.1 Span + Full 36.8 7.0 26.0 24.0 21.3 23.0 Span + Full + Span 62.8 10.7 24.6 36.5 28.5 32.6 (b) Sequence Duplication w/o Seq. Duplication 49.6 6.0 23.6 19.9 15.2 22.9 w/ Seq. Duplication 62.8 10.7 24.6 36.5 28.5 32.6 (c) Selective Re-masking w/o Re-masking (last-only) 39.5 2.5 19.1 30.7 21.2 22.6 w/ Re-masking (selective) 62.8 10.7 24.6 36.5 28.5 32.6 4.4.2 Effect of Sequence Duplication. Masked diusion relies on contextual reasoning over the activation window , whereas the pretrained backbone use d in STRIDE follows causal attention and therefore only exposes left context during prediction. This mismatch limits the model’s ability to jointly infer activation states within the window . T o mitigate this, we apply sequence duplica- tion , which provides full-window context to the prediction tokens while preser ving the causal backbone. As shown in table 4 ( b), removing se quence duplication leads to a consistent performance drop across all tasks, reducing the average score from 32.6 to 22.9. The degradation is particularly notable in temp orally sensitive tasks such as T V G and D V C, indicating that accurate boundar y reasoning benets from access to the full activation window . These results demonstrate that sequence duplication eectively recovers bidirectional context for diusion-based rene- ment, enabling full-window conditioning through a simple input reparameterization without mo difying the causal architecture. 4.4.3 Effect of Selective Re-masking. In the streaming setting, activation predictions are carried forward as the window advances. If these states are pre- served without revision, early mistakes can propagate and gradually corrupt the activation sequence. T o examine this eect, we compare our selective re-masking strategy with a simplied variant that masks only the newly appende d position ( last-only ), leaving previous decisions xed. As shown in table 4 (c), restricting re-masking to the last position leads to a substantial performance drop, reducing the average score from 32.6 to 22.6. As only predicting last token falls into autoregressive prediction, the resulting performance is also similar to Baseline- AR in table 3 . In contrast, 9 STRIDE Basel ine - AR Time to Even t Onset (s) Event Progres s ( %) Time Since Even t End (s) ST R I D E - MD M ST R I D E - Bi n a r y Ti m e to E v e n t O n s e t ( s ) Ev e n t P r o g r e s s ( % ) Ti m e S i n c e E v e n t E n d ( s ) (a) Pre-Ev ent (b) During Event (c) Post-Event Figure 3 Activation transition frequency results ar ound event boundaries on ET -Bench T V G. Baseline- AR model shows frequent oscillations near boundaries, whereas STRIDE produces more robust activation spans. selectively r e-masking lo w-condence positions allows the model to r evise uncertain decisions as ne w frames arrive, enabling renement of the activation sequence by using the updated context information. 4.5 Behavioral Analysis of STRIDE Properties 4.5.1 Flick ering Analysis around Ev ent Boundaries. While ET -Bench quanties activation accuracy , it is also limited to capture the temporal stability of activation deci- sions. In particular , per-frame activation models may suer from ickering behavior due to their inherently isolated predictions, where predictions rapidly oscillate b etween active and inactive states (0 ↔ 1), resulting in unstable trigger- ing and poorly resolved transition boundaries. T o analyze this phenomenon, we measure the frequency of activation transitions relative to event boundaries. Specically , we align predictions around ground-truth events and accumulate transition counts within three regions ( gure 3 ): (a) pre-event ( -60s to onset), ( b) during-event (normalized by event progress %), and ( c) post-event (oset to +60s), using the TV G task of ET -Bench where each instance corresponds to a single event. As in the gure, across all regions, Baseline-AR exhibits substantially higher transition frequency , indicating unsta- ble activation sequences with frequent on/o oscillations. This instability becomes particularly striking near event boundaries, where transition frequency sharply increases, suggesting diculty in resolving the precise onset and oset of events. In contrast, STRIDE produces signicantly smoother activation patterns with far fewer transitions. The reduced ickering indicates that mo deling activation as structured se quence denoising encourages temporally coherent predictions, allowing the model to maintain consistent activation spans and more reliably capture event boundaries. 4.5.2 Latency– Accuracy Trade-off for Denoising Steps. W e analyze the eect of the denoising step K on both activation model accuracy and infer ence latency as illustrated in gure 4 . This trade-o is particularly important in the streaming setting, where the activation model operates on- line and directly determines the model’s response latency . Increasing K allows the model to perform more renement steps, improving activation accuracy but also increasing inference time. In practice, we obser ve that performance saturates quickly: around K = 8 steps already achieves near-maximum mean F1 across ET -Bench subtasks. This behavior likely stems from the small output space of the activation sequence, wher e each position only takes binary states (0 or 1), making the denoising process relatively easier to converge than large vocabulary space . At K = 8 , the inference latency is approximately ∼ 100 ms, which is practical enough to support real-time operation for streaming frame rates of downstream models. 4.5.3 Streaming Efficiency and Memory F ootprint. Extending the latency-accuracy trade-o analysis in gure 4 , we decompose the computational ov erhead introduced by the activation mo del under a streaming setup. The measurement is conducte d on a single H100 GP U with a 128- frame context budget. As shown in table 5 , when a subsequent response is required, the 113 ms (new frame and K = 8 denoising steps) added by STRIDE incurs only a 7% additional latency compared to the 1511 ms required by the base model Qwen3VL-8B Bai et al. ( 2025a ) without the triggering module. When a trigger is unnecessar y , STRIDE saves 10 # Numbe r of Denoising Step 𝑲 Figure 4 T rade-o between ET -Bench performance (mean F1) and inference latency for denoising step K . T able 5 Latency and VRAM usage of the downstream Video-LLM and STRIDE activation modules (with AR variation) during streaming inference. Procedure Latency (ms) VRAM Downstream Vide o-LLM Response Gen. (T TFT) 1276 17.8 GB Response Gen. (T TLT) 1511 + 13 MB STRIDE Activation Sate (Base) 5.2 GB + 1 Denoising Step 12 + 10 MB + Append Frame 20 + 30 MB Baseline- AR Activation Sate (Base) 5.2 GB + Append Frame 26 + 30 MB approximately 91% of the total processing time (113 ms vs. 1276 ms). Furthermore, compared to the per-frame de cision baseline (Baseline- AR, 26 ms), the extra latency from the diusion process (113 ms) is limite d to 87 ms. In terms of memory , STRIDE maintains a lightweight footprint of 5.2 GB. Executing denoising process requires an additional 10 MB, and each new frame introduces 30 MB of incremental memory usage . These highlight the advantage of the two- stage design: a lightw eight activation model gates the expensive downstream model. Even with the maske d diusion module employ ed in STRIDE, trigger modeling introduces only minimal latency and memory overhead, maintaining ecient streaming inference . 5 Conclusion W e present STRIDE , a framework for proactive streaming video understanding that models activation as a structured temporal sequence rather than independent per-frame decisions. By leveraging a lightw eight masked diusion mod- ule to jointly rene activation signals over a sliding window , STRIDE captures span-level temporal structure and produces more stable and coherent triggering behavior in streaming settings. Extensive experiments and analyses show that jointly modeling activation over a temp oral window signicantly improves event boundary lo calization and reduces unstable triggering, while introducing only minimal overhead to the ov erall streaming pipeline. R eferences Lisa Anne Hendricks, Oliver W ang, Eli She chtman, Josef Sivic, Trev or Darrell, and Br yan Russell. Localizing moments in vide o with natural language. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) , 2017. Jacob A ustin, Daniel D Johnson, Jonathan Ho, Daniel T arlow , and Rianne V an Den Berg. Structured denoising diusion models in discrete state-spaces. Advances in neural information processing systems , 34:17981–17993, 2021. Jinze Bai, Shuai Bai, Shusheng Y ang, Shijie W ang, Sinan T an, Peng W ang, Junyang Lin, Chang Zhou, and Jingren Zhou. Q wen-vl: A versatile vision-language model for understanding, localization, text reading, and beyond. arXiv preprint , 1 (2):3, 2023. Shuai Bai, Y uxuan Cai, Ruizhe Chen, K eqin Chen, Xionghui Chen, Zesen Cheng, Lianghao Deng, W ei Ding, Chang Gao, Chunjiang Ge, W enbin Ge, Zhifang Guo, Qidong Huang, Jie Huang, Fei Huang, Binyuan Hui, Shutong Jiang, Zhaohai Li, Mingsheng Li, Mei Li, Kaixin Li, Zicheng Lin, Junyang Lin, Xuejing Liu, Jiawei Liu, Chenglong Liu, Y ang Liu, Dayiheng Liu, Shixuan Liu, Dunjie Lu, Ruilin Luo, Chenxu Lv , Rui Men, Lingchen Meng, Xuancheng Ren, Xingzhang Ren, Sib o Song, Yuchong Sun, Jun T ang, Jianhong T u, Jianqiang W an, Peng W ang, Pengfei W ang, Qiuyue W ang, Y uxuan W ang, Tianbao Xie, Yiheng Xu, Haiyang Xu, Jin Xu, Zhibo Y ang, Mingkun Y ang, Jianxin Y ang, An Y ang, Bowen Y u, Fei Zhang, Hang Zhang, Xi Zhang, Bo Zheng, Humen Zhong, Jingren Zhou, Fan Zhou, Jing Zhou, Y uanzhi Zhu, and Ke Zhu. Qwen3-vl technical report. arXiv preprint arXiv:2511.21631 , 2025a. Shuai Bai, Keqin Chen, Xuejing Liu, Jialin W ang, W enbin Ge, Sib o Song, Kai Dang, Peng W ang, Shijie W ang, Jun T ang, et al. Qwen2. 5-vl technical report. arXiv preprint , 2025b. 11 Tiwei Bie, Maosong Cao, Kun Chen, Lun Du, Mingliang Gong, Zhuochen Gong, Y anmei Gu, Jiaqi Hu, Zenan Huang, Zhenzhong Lan, et al. Llada2. 0: Scaling up diusion language models to 100b. arXiv preprint , 2025. T om Brown, Benjamin Mann, Nick Ryder , Melanie Subbiah, Jared D Kaplan, Prafulla Dhariwal, Ar vind Neelakantan, Pranav Shyam, Girish Sastry , Amanda Askell, et al. Language models are few-shot learners. Advances in neural information processing systems , 33:1877–1901, 2020. Fabian Caba Heilbr on, Victor Escorcia, Bernard Ghanem, and Juan Carlos Niebles. Activitynet: A large-scale video benchmark for human activity understanding. In Proceedings of the ieee conference on computer vision and pattern recognition , pages 961–970, 2015. Joya Chen, Zhaoyang Lv , Shiwei W u, K evin Qinghong Lin, Chenan Song, Difei Gao, Jia- W ei Liu, Ziteng Gao, Dongxing Mao, and Mike Zheng Shou. Videollm-online: Online video large language model for streaming video. In Proce edings of the IEEE/CVF Conference on Computer Vision and Pattern Re cognition , pages 18407–18418, 2024a. Joya Chen, Ziyun Zeng, Yiqi Lin, W ei Li, Zejun Ma, and Mike Zheng Shou. Livecc: Learning video llm with streaming spe ech transcription at scale. In Proceedings of the Computer Vision and Pattern Recognition Conference , pages 29083–29095, 2025a. Zhe Chen, Jiannan Wu, W enhai W ang, W eijie Su, Guo Chen, Sen Xing, Zhong Muyan, Qinglong Zhang, Xizhou Zhu, Lewei Lu, et al. Internvl: Scaling up vision foundation mo dels and aligning for generic visual-linguistic tasks. arXiv preprint , 2023. Zhe Chen, W eiyun W ang, Hao Tian, Shenglong Y e, Zhangwei Gao, Erfei Cui, W enwen T ong, Kongzhi Hu, Jiap eng Luo, Zheng Ma, et al. How far are we to gpt-4v? closing the gap to commercial multimodal models with open-source suites. Science China Information Sciences , 67(12):220101, 2024b. Zigeng Chen, Gongfan Fang, Xinyin Ma, Ruonan Y u, and Xinchao W ang. dparallel: Learnable parallel deco ding for dllms. arXiv preprint arXiv:2509.26488 , 2025b. Shuang Cheng, Y uhua Jiang, Zineng Zhou, Dawei Liu, W ang T ao, Linfeng Zhang, Biqing Qi, and Bo wen Zhou. Sdar-vl: Stable and ecient block-wise diusion for vision-language understanding. arXiv preprint , 2025. Zesen Cheng, Sicong Leng, Hang Zhang, Yifei Xin, Xin Li, Guanzheng Chen, Y ongxin Zhu, W enqi Zhang, Ziyang Luo, Deli Zhao, et al. Videollama 2: Advancing spatial-temporal modeling and audio understanding in video-llms. arXiv preprint arXiv:2406.07476 , 2024. W enliang Dai, Junnan Li, Dong xu Li, Anthony Tiong, Junqi Zhao, W eisheng W ang, Boyang Li, Pascale Fung, and Steven Hoi. InstructBLIP: T owards general-purpose vision-language mo dels with instruction tuning. In Advances in Neural Information Processing Systems , 2023. Shansan Gong, Shivam Agarwal, Yizhe Zhang, Jiacheng Y e, Lin Zheng, Mukai Li, Chenxin An, Peilin Zhao, W ei Bi, Jiawei Han, et al. Scaling diusion language mo dels via adaptation from autoregressiv e models. arXiv preprint , 2024. Y ongxin Guo, Jingyu Liu, Mingda Li, Dingxin Cheng, Xiaoying T ang, Dianbo Sui, Qingbin Liu, Xi Chen, and Kevin Zhao. Vtg- llm: Integrating timestamp knowledge into vide o llms for enhance d vide o temporal grounding. In Procee dings of the AAAI Conference on A rticial Intelligence , volume 39, pages 3302–3310, 2025. Bin Huang, Xin W ang, Hong Chen, Zihan Song, and W enwu Zhu. Vtimellm: Emp ower llm to grasp video moments. In Pr ocee dings of the IEEE/CVF Conference on Computer Vision and Pattern Re cognition , pages 14271–14280, 2024a. De- An Huang, Shijia Liao, Subhashree Radhakrishnan, Hongxu Yin, Pavlo Molchanov , Zhiding Y u, and Jan K autz. Lita: Language instructed temporal-localization assistant. In European Conference on Computer Vision , pages 202–218. Springer , 2024b. Yifei Huang, Jilan Xu, Baoqi Pei, Y uping He, Guo Chen, Lijin Y ang, Xinyuan Chen, Y aohui W ang, Zheng Nie, Jinyao Liu, et al. Vinci: A real-time embodie d smart assistant based on egocentric vision-language mo del. arXiv preprint , 2024c. Junho Kim, Hyunjun Kim, Hosu Lee, and Y ong Man Ro. Salova: Segment-augmente d long video assistant for targete d retrieval and routing in long-form video analysis. arXiv preprint , 2024. Bo Li, Y uanhan Zhang, Dong Guo, Renrui Zhang, Feng Li, Hao Zhang, Kaichen Zhang, Y anwei Li, Ziwei Liu, and Chunyuan Li. Llava-onevision: Easy visual task transfer . arXiv preprint , 2024a. Feng Li, Renrui Zhang, Hao Zhang, Yuanhan Zhang, Bo Li, W ei Li, Zejun Ma, and Chunyuan Li. Llava-next-interleave: T ackling multi-image, video, and 3d in large multimodal models. arXiv preprint , 2024b. Junnan Li, Dong xu Li, Silvio Savarese, and Steven Hoi. Blip-2: Bo otstrapping language-image pre-training with frozen image encoders and large language models. In International Conference on Machine Learning . PMLR, 2023. 12 Kunchang Li, Y ali W ang, Yinan He, Yizhuo Li, Yi W ang, Yi Liu, Zun W ang, Jilan Xu, Guo Chen, Ping Luo, et al. Mvb ench: A comprehensive multi-modal video understanding benchmark. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Re cognition , pages 22195–22206, 2024c. Shufan Li, Konstantinos Kallidromitis, Hritik Bansal, Akash Gokul, Y usuke Kato, Kazuki Kozuka, Jason Kuen, Zhe Lin, Kai- W ei Chang, and Aditya Grover . Lavida: A large diusion language model for multimodal understanding. arXiv preprint arXiv:2505.16839 , 2025a. W ei Li, Bing Hu, Rui Shao, Leyang Shen, and Liqiang Nie. Lion-fs: Fast & slow vide o-language thinker as online video assistant. In Proceedings of the Computer Vision and Pattern Recognition Conference , pages 3240–3251, 2025b. Y anwei Li, Chengyao W ang, and Jiaya Jia. Llama-vid: An image is worth 2 tokens in large language models. In European Conference on Computer Vision , pages 323–340. Springer , 2025c. Bin Lin, Y ang Y e, Bin Zhu, Jiaxi Cui, Munan Ning, Peng Jin, and Li Y uan. Video-llava: Learning unite d visual representation by alignment before projection. arXiv preprint , 2023. Ji Lin, Hongxu Yin, W ei Ping, Pavlo Molchanov , Mohammad Shoeybi, and Song Han. Vila: On pre-training for visual language models. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages 26689–26699, 2024a. Junming Lin, Zheng Fang, Chi Chen, Zihao W an, Fuwen Luo, Peng Li, Y ang Liu, and Maosong Sun. Streamingbench: Assessing the gap for mllms to achieve streaming video understanding. arXiv preprint , 2024b. Haotian Liu, Chunyuan Li, Y uheng Li, and Y ong Jae Lee. Improved baselines with visual instruction tuning. arXiv preprint arXiv:2310.03744 , 2023a. Haotian Liu, Chunyuan Li, Qingyang Wu, and Y ong Jae Lee. Visual instruction tuning. In Advances in Neural Information Processing Systems , 2023b. Jiajun Liu, Yibing W ang, Hanghang Ma, Xiaoping Wu, Xiaoqi Ma, Xiaoming W ei, Jianbin Jiao, Enhua Wu, and Jie Hu. Kangaroo: A powerful video-language model supporting long-context video input. arXiv preprint , 2024a. Y e Liu, Zongyang Ma, Zhongang Qi, Y ang Wu, Ying Shan, and Chang W Chen. Et bench: T owards open-ended event-level video-language understanding. Advances in Neural Information Processing Systems , 37:32076–32110, 2024b. Aaron Lou, Chenlin Meng, and Stefano Ermon. Discrete diusion modeling by estimating the ratios of the data distribution. arXiv preprint arXiv:2310.16834 , 2023. Shen Nie, Fengqi Zhu, Zebin Y ou, Xiaolu Zhang, Jingyang Ou, Jun Hu, Jun Zhou, Y ankai Lin, Ji-Rong W en, and Chongxuan Li. Large language diusion models. arXiv preprint , 2025. Zhenyu Ning, Guangda Liu, Qihao Jin, W enchao Ding, Minyi Guo, and Jieru Zhao. Livevlm: Ecient online video understanding via streaming-oriented kv cache and retrieval. arXiv preprint , 2025. Junbo Niu, Yifei Li, Ziyang Miao, Chunjiang Ge, Y uanhang Zhou, Qihao He, Xiaoyi Dong, Hao dong Duan, Shuangrui Ding, Rui Qian, et al. Ovo-bench: How far is your video-llms from real-world online video understanding? In Proceedings of the Computer Vision and Pattern Recognition Conference , pages 18902–18913, 2025. OpenAI. ChatGPT. https://openai.com/blog/chatgpt/ , 2022. OpenAI. Hello gpt-4o, 2024. URL https://openai.com/index/hello- gpt- 4o/ . Rui Qian, Xiaoyi Dong, Pan Zhang, Y uhang Zang, Shuangrui Ding, Dahua Lin, and Jiaqi W ang. Streaming long video understand- ing with large language models. Advances in Neural Information Processing Systems , 37:119336–119360, 2024. Rui Qian, Shuangrui Ding, Xiaoyi Dong, Pan Zhang, Yuhang Zang, Yuhang Cao, Dahua Lin, and Jiaqi W ang. Dispider: Enabling video llms with active real-time interaction via disentangled perception, decision, and reaction. In Proceedings of the Computer Vision and Pattern Recognition Conference , pages 24045–24055, 2025. Machel Reid, Nikolay Savinov , Denis T eplyashin, Dmitr y Lepikhin, Timothy Lillicrap, Jean-baptiste Alayrac, Radu Soricut, An- geliki Lazaridou, Orhan Firat, Julian Schrittwieser , et al. Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context. arXiv preprint , 2024. Shuhuai Ren, Linli Y ao, Shicheng Li, Xu Sun, and Lu Hou. Timechat: A time-sensitive multimodal large language mo del for long video understanding. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Re cognition , pages 14313–14323, 2024. 13 Subham Saho o, Marianne Arriola, Y air Schi, Aaron Gokaslan, Edgar Marroquin, Justin Chiu, Alexander Rush, and V olodymyr Kuleshov . Simple and eective maske d diusion language models. Advances in Neural Information Processing Systems , 37: 130136–130184, 2024. Share. Sharegemini: Scaling up video caption data for multimodal large language mo dels, June 2024. URL https://github.com/ Share14/ShareGemini . Xiaoqian Shen, Y unyang Xiong, Changsheng Zhao, Lemeng W u, Jun Chen, Chenchen Zhu, Zechun Liu, Fanyi Xiao, Balakrishnan V aradarajan, Florian Bordes, et al. Longvu: Spatiotemp oral adaptive compression for long video-language understanding. arXiv preprint arXiv:2410.17434 , 2024. Jiaxin Shi, K ehang Han, Zhe W ang, Arnaud Doucet, and Michalis Titsias. Simplied and generalized masked diusion for discr ete data. Advances in neural information processing systems , 37:103131–103167, 2024. Gunnar A Sigurdsson, Gül V arol, Xiaolong W ang, Ali Farhadi, Ivan Laptev , and Abhinav Gupta. Holly wood in homes: Crowd- sourcing data collection for activity understanding. In European conference on computer vision , pages 510–526. Springer , 2016. Gunnar A Sigurdsson, Abhinav Gupta, Cordelia Schmid, Ali Farhadi, and Karteek Alahari. Charades-ego: A large-scale dataset of paired third and rst person videos. arXiv preprint , 2018. Enxin Song, W enhao Chai, Guanhong W ang, Yucheng Zhang, Haoyang Zhou, Feiyang Wu, Haozhe Chi, Xun Guo, Tian Y e, Y anting Zhang, et al. Moviechat: From dense token to sparse memory for long vide o understanding. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Re cognition , pages 18221–18232, 2024. Gemma T eam, Aishwar ya Kamath, Johan Ferret, Shreya Pathak, Nino Vieillard, Ramona Merhej, Sarah Perrin, Tatiana Matejovi- cova, Alexandre Ramé, Morgane Rivièr e, et al. Gemma 3 te chnical report. arXiv preprint , 2025. Hugo T ouvron, Thibaut Lavril, Gautier Izacard, Xavier Martinet, Marie-Anne Lachaux, Timothée Lacroix, Baptiste Rozière, Naman Goyal, Eric Hambro, Faisal Azhar , et al. Llama: Open and ecient foundation language models. arXiv preprint , 2023. Haibo W ang, Zhiyang Xu, Yu Cheng, Shizhe Diao, Y ufan Zhou, Yixin Cao, Qifan W ang, W eifeng Ge, and Lifu Huang. Grounded- videollm: Sharp ening ne-grained temporal grounding in video large language models. arXiv preprint , 2024a. Haibo W ang, Bo Feng, Zhengfeng Lai, Mingze Xu, Shiyu Li, W eifeng Ge, Afshin Dehghan, Meng Cao, and Ping Huang. Stream- bridge: T urning your oine video large language model into a proactive streaming assistant. arXiv preprint , 2025a. Peng W ang, Shuai Bai, Sinan T an, Shijie W ang, Zhihao Fan, Jinze Bai, Keqin Chen, Xuejing Liu, Jialin W ang, W enbin Ge, et al. Qwen2-vl: Enhancing vision-language model’s perception of the world at any resolution. arXiv preprint , 2024b. W eiyun W ang, Zhe Chen, W enhai W ang, Y ue Cao, Y angzhou Liu, Zhangwei Gao, Jinguo Zhu, Xizhou Zhu, Lewei Lu, Y u Qiao, et al. Enhancing the reasoning ability of multimo dal large language models via mixed preference optimization. arXiv preprint arXiv:2411.10442 , 2024c. W eiyun W ang, Zhangwei Gao, Lixin Gu, Hengjun Pu, Long Cui, Xingguang W ei, Zhaoyang Liu, Linglin Jing, Shenglong Y e, Jie Shao, et al. Internvl3. 5: Advancing open-source multimodal mo dels in versatility , reasoning, and eciency . arXiv preprint arXiv:2508.18265 , 2025b. Y ueqian W ang, Xiaojun Meng, Y uxuan W ang, Jianxin Liang, Jiansheng W ei, Huishuai Zhang, and Dongyan Zhao. Videollm knows when to speak: Enhancing time-sensitive video comprehension with video-text duet interaction format. arXiv preprint arXiv:2411.17991 , 2024d. Meng W ei, Chenyang W an, Xiqian Yu, T ai W ang, Yuqiang Y ang, Xiaohan Mao, Chenming Zhu, W enzhe Cai, Hanqing W ang, Yilun Chen, et al. Streamvln: Streaming vision-and-language navigation via slowfast context modeling. arXiv preprint arXiv:2507.05240 , 2025. Bin Xie, Yingfei Liu, Tiancai W ang, Jiale Cao, and Xiangyu Zhang. Glad: A streaming scene generator for autonomous driving. arXiv preprint arXiv:2503.00045 , 2025. Haomiao Xiong, Zongxin Y ang, Jiazuo Y u, Y unzhi Zhuge, Lu Zhang, Jiawen Zhu, and Huchuan Lu. Streaming video understanding and multi-round interaction with memory-enhanced knowledge. arXiv preprint , 2025. Ruyi Xu, Guangxuan Xiao, Y ukang Chen, Liuning He, Kelly Peng, Y ao Lu, and Song Han. Streamingvlm: Real-time understanding for innite video streams. arXiv preprint , 2025. An Y ang, Anfeng Li, Baosong Y ang, Beichen Zhang, Binyuan Hui, Bo Zheng, Bowen Y u, Chang Gao, Chengen Huang, Chenxu Lv , et al. Q wen3 technical report. arXiv preprint , 2025a. 14 Haolin Y ang, Feilong T ang, Lingxiao Zhao, Xiang An, Ming Hu, Huifa Li, Xinlin Zhuang, Yifan Lu, Xiaofeng Zhang, Abdalla Swikir , et al. Streamagent: T owards anticipator y agents for streaming video understanding. arXiv preprint , 2025b. Y anlai Y ang, Zhuokai Zhao, Satya Narayan Shukla, Aashu Singh, Shlok Kumar Mishra, Lizhu Zhang, and Mengye Ren. Str eammem: Query-agnostic kv cache memor y for streaming video understanding. arXiv preprint , 2025c. Linli Y ao, Yicheng Li, Y uancheng W ei, Lei Li, Shuhuai Ren, Yuanxin Liu, Kun Ouyang, Lean W ang, Shicheng Li, Sida Li, et al. Timechat-online: 80% visual tokens are naturally redundant in streaming vide os. In Proceedings of the 33rd ACM International Conference on Multimedia , pages 10807–10816, 2025. Y uan Y ao, Tianyu Yu, Ao Zhang, Chongyi W ang, Junbo Cui, Hongji Zhu, Tianchi Cai, Haoyu Li, W eilin Zhao, Zhihui He, et al. Minicpm-v: A gpt-4v level mllm on your phone. arXiv preprint , 2024. Jiacheng Y e, Zhihui Xie, Lin Zheng, Jiahui Gao, Zirui Wu, Xin Jiang, Zhenguo Li, and Lingpeng Kong. Dream 7b: Diusion large language models. arXiv preprint , 2025. Zebin Y ou, Shen Nie, Xiaolu Zhang, Jun Hu, Jun Zhou, Zhiwu Lu, Ji-Rong W en, and Chongxuan Li. Llada-v: Large language diusion models with visual instruction tuning. arXiv preprint , 2025. Runpeng Y u, Xinyin Ma, and Xinchao W ang. Dimple: Discrete diusion multimodal large language model with parallel decoding. arXiv preprint arXiv:2505.16990 , 2025. Boqiang Zhang, Kehan Li, Zesen Cheng, Zhiqiang Hu, Yuqian Y uan, Guanzheng Chen, Sicong Leng, Yuming Jiang, Hang Zhang, Xin Li, et al. Videollama 3: Frontier multimodal foundation models for image and video understanding. arXiv preprint arXiv:2501.13106 , 2025a. Hang Zhang, Xin Li, and Lidong Bing. Video-llama: An instruction-tune d audio-visual language model for vide o understanding. arXiv preprint arXiv:2306.02858 , 2023. Haoji Zhang, Yiqin W ang, Y ansong T ang, Y ong Liu, Jiashi Feng, and Xiaojie Jin. F lash-vstream: Ecient real-time understanding for long video streams. arXiv preprint , 2025b. Kairui Zhang, Zhenyu Y ang, Bing W ang, Shengsheng Qian, and Changsheng Xu. Querystream: Advancing streaming video understanding with query-aware pruning and proactive response. In The Fourteenth International Conference on Learning Rep- resentations . Peiyuan Zhang, Kaichen Zhang, Bo Li, Guangtao Zeng, Jingkang Y ang, Y uanhan Zhang, Ziyue W ang, Haoran T an, Chunyuan Li, and Ziwei Liu. Long context transfer from language to vision. arXiv preprint , 2024a. Y uanhan Zhang, Jinming W u, W ei Li, Bo Li, Zejun Ma, Ziwei Liu, and Chunyuan Li. Vide o instruction tuning with synthetic data. arXiv preprint arXiv:2410.02713 , 2024b. Y ulin Zhang, Cheng Shi, Y ang W ang, and Sib ei Y ang. Eyes wide open: Ego proactiv e video-llm for streaming video . arXiv preprint arXiv:2510.14560 , 2025c. Luowei Zhou, Chenliang Xu, and Jason Corso. T owards automatic learning of proce dures from web instructional vide os. In Proceedings of the AAAI conference on articial intelligence , volume 32, 2018. Fengqi Zhu, Rongzhen W ang, Shen Nie, Xiaolu Zhang, Chunwei W u, Jun Hu, Jun Zhou, Jianfei Chen, Y ankai Lin, Ji-Rong W en, et al. Llada 1.5: V ariance-reduced prefer ence optimization for large language diusion models. arXiv preprint , 2025a. Jinguo Zhu, W eiyun W ang, Zhe Chen, Zhaoyang Liu, Shenglong Y e, Lixin Gu, Yuchen Duan, Hao Tian, W eijie Su, Jie Shao, et al. In- ternvl3: Exploring advanced training and test-time r ecipes for open-source multimodal models. arXiv preprint , 2025b. 15 Appendix Contents A Detailed Training Setup for STRIDE 16 A.1 Training Dataset Conguration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 A.2 Training Hyperparameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 B Detailed Architecture and Inference of STRIDE 18 B.1 Masked Diusion Formulation for Activation Span Modeling . . . . . . . . . . . . . . . . . . . . . . . 18 B.2 Training Objective for A ctivation Diusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 B.3 Inference Procedure for Activation Span Pr ediction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 C Detailed Benchmark and Evaluation Setup 19 C.1 Additional Benchmark Explanation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 C.2 Comparison with A utoregressive Baseline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 D A dditional Experimental Analysis 21 D .1 Sensitivity Analysis for τ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 D .2 Scalability Analysis for Activation Backbone . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 D .3 Qualitative Examples of STRIDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 E Limitation and Discussion 22 E.1 Failure Cases and Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 A Detailed T raining Setup for STRIDE A.1 T raining Dataset Configuration W e build the training data for activation span modeling by collecting and carefully curating se ven publicly available video understanding datasets Caba Heilbron et al. ( 2015 ); Liu et al. ( 2024b ); Sigurdsson et al. ( 2016 , 2018 ); W ang et al. ( 2024a ); Anne Hendricks et al. ( 2017 ); Liu et al. ( 2024b ) that provide temporal annotations of events or actions. These datasets cover tasks such as dense video captioning, temporal activity localization, grounded vide o question answering, and procedural understanding. For each dataset, we use the provided temporal boundaries of events to construct activation spans that indicate when a relevant ev ent occurs in the video. T o make the data suitable for our objective, we r eorganize the annotations into a unied format where each training sample consists of a video, a query describing the event of interest, and the corresponding temporal span dened by the event start and end times. Based on this span, we construct an activation signal over the vide o timeline: frames (or tokens) that fall within the annotated event span are labele d as 1 ( active ), while all other positions are labele d as 0 ( inactive ). This binary activation sequence ser ves as the super vision signal for training the mo del to dete ct when the queried event becomes relevant in the video stream. table 6 summarizes the statistics of the curated training datasets. Training samples are constructe d dierently de- pending on whether a query corresponds to a single e vent or multiple events in the video. For datasets such as dense video captioning Caba Heilbron et al. ( 2015 ); Liu et al. ( 2024b ), temporal activity detection Sigurdsson et al. ( 2016 , 2018 ), grounded video QA W ang et al. ( 2024a ), and moment localization Anne Hendricks et al. ( 2017 ), each caption or query typically describes a single event. In these cases, the query is paired with the corresponding video segment, and the activation span is dened using the annotated start and end timestamps of the e vent. For datasets involving 16 T able 6 Training dataset statistics. Videos : number of source videos; Items : total annotation entries; Single : single-event entries; Multi : multi-event entries (av erage event count in parentheses); Segs : total training segments. Dataset Videos Items Single Multi Segs ActivityNet-Captions Caba Heilbron et al. ( 2015 ) 10,009 37,421 37,421 – 37,421 LI T A Huang et al. ( 2024b ) 10,000 32,489 32,489 – 32,489 Y ouCook2 Zhou et al. ( 2018 ) 1,333 11,480 10,337 1,143 ( × 7.7) 19,174 ET -Instruct Liu et al. ( 2024b ) 91,121 136,072 71,966 64,106 ( × 5.1) 398,609 Charades Sigurdsson et al. ( 2016 ) 7,811 48,684 48,067 617 ( × 2.1) 49,374 CharadesEgo Sigurdsson et al. ( 2018 ) 6,158 61,575 57,828 3,747 ( × 2.0) 65,488 DiDeMo Anne Hendricks et al. ( 2017 ) 8,208 22,911 22,911 – 22,911 Grounded- VideoLLM W ang et al. ( 2024a ) 17,096 61,812 61,812 – 61,812 T otal 151,736 412,444 342,831 69,613 687,278 multiple actions or procedural steps Sigurdsson et al. ( 2016 , 2018 ); Zhou et al. ( 2018 ); Liu et al. ( 2024b ), a single quer y may correspond to multiple events in the video. For action recognition tasks, the action label itself is used as the query , while for proce dural datasets we use the original question or caption as the quer y and construct activation spans for each relevant event. T o prev ent repeate d activation for events that have already occurred, we sample a random time point between the end of the previous event and the start of the current event and set all activation positions b efore that point to 0 . This encourages the mo del to ignore previously completed events and focus on the target span. Overall, the training set contains 141.7K videos with 379.9K annotations, including 310.3K single-event and 69.6K multi-event samples, resulting in 654.7K training segments. For multi-event samples, the average number of events per sample is reported in parentheses. A.2 T raining Hyperparameters T o ensure r eproducibility , we report the full set of hyperparameters used for training STRIDE (Qwen3- VL 2B and 4B) in T able 7 . W e process the input video stream at 1 FPS, accommodating up to 256 frames with a maximum spatial resolution of 512 × 512 . Correspondingly , the temporal activation window size ( W ) is set to 256. The mo del is trained using the AdamW optimizer ( β 1 = 0 . 9 , β 2 = 0 . 999 ) with a global batch size of 256 and no weight decay . W e apply dierential learning rates: 3 × 10 − 5 for the language head and 1 × 10 − 5 for the language backb one, with a linear warmup of 512 steps followed by cosine decay . W e use a gradient clipping threshold of 1.0, boat16 precision, and DeepSpee d ZeRO-2. T able 7 Detaile d training hyperparameters for STRIDE . Cong V alue Input frames 1 FPS LR scheduler Linear warm-up with cosine decay W armup steps 512 Optimizer AdamW ( β 1 =0 . 9 , β 2 =0 . 999 ) Global Batch size 256 Learning rate (lang. head) 3 × 10 − 5 Learning rate (lang. backbone) 1 × 10 − 5 W eight decay 0 Gradient clipping 1.0 Training precision boat16 DeepSpeed ZeRO-2 Input Resolution Upto 512 × 512 Act. Window size ( W ) 256 For each training sample, the visual context window is constructed with a length uniformly sampled between max( L, 8) and min( L, 256) seconds, where L denotes the source video length. This window is then randomly positioned along the video timeline, ensuring that the target event may or may not fall within the observable window . T o allow the model to attend only to the current event of interest while disregar ding previously completed e vents within the same 17 window , the xed inactive positions from multi-event samples ( section A.1 ) are overridden onto the masked activa- tion sequence after masking corruption. This ensures that these positions that these positions remain as 0 regardless of the applied mask. When the event of interest lies entirely outside the context window , the entire activation se- quence is set to 0 , training the model not to trigger . Conversely , all activation p ositions that temporally ov erlap with the target event are set to 1 , enabling the do wnstream model to be invoked at the appropriate time. B Detailed Architecture and Inference of STRIDE B.1 Mask ed Diffusion F ormulation for Activ ation Span Modeling In STRIDE , activation span pr ediction is formulate d as a masked diusion process over a discrete activation sequence dened along the video timeline . Given a video and a query describing an event of interest, the supervision signal is represented as a binar y activation sequence a 0 = ( a 1 0 , . . . , a W 0 ) of length W , where a i 0 ∈ { 0 , 1 } indicates whether the queried event is active at position i . Positions inside the annotated event span are lab eled as 1 ( active ), while all other positions are labeled as 0 ( inactive ). B.1.1 F orward Corruption Process. T o enable iterative renement during training, we apply a masked diusion corruption process to the activation sequence. Starting from the ground-truth se quence a 0 , the for ward process progressively masks tokens using a special symbol [M] . At noise level t ∈ [0 , 1] , tokens are replaced by [M] with probability t , producing a partially corrupted sequence a t . The corruption process factorizes across positions: q ( a t | a 0 ) = W Y i =1 q ( a i t | a i 0 ) , q ( a i t | a i 0 ) = ( 1 − t if a i t = a i 0 , t if a i t = [M] . (3) Here, it is imp ortant to note that STRIDE does not apply token-wise indep endent masking in practice. Instead, we use the proposed structured masking strategy ( section 3.2.1 ) during training, where masking patterns are constructed to preserve contiguous temporal context along the video timeline while selectively hiding portions of the activation sequence. This encourages the model to infer coherent activation spans rather than predicting isolated token states. B.1.2 Re v erse Denoising Process. The forward corruption process admits a reverse denoising process that reconstructs the clean activation se quence from a corrupted sequence. Given a partially maske d activation sequence a t , the model predicts the original activa- tion token at each maske d position conditioned on the observed context. During the reverse process, tokens that have already b een revealed remain unchanged, while masked positions are progressively unmaske d according to the model’s predictions or kept masked for further renement. Through this iterative denoising process, the mo del gradually recovers the activation sequence and renes activation predictions acr oss the entire video timeline. B.2 T raining Objective for Activ ation Diffusion The model is trained by minimizing a cross-entropy loss ov er masked activation positions. Following the masked diusion formulation, the objective can be written as: L ( θ ) = − E t ∼ U [0 , 1] , a t ∼ q ( a t | a 0 ) " 1 t W X i =1 1 [ a i t = [M] ] log p θ ( a i 0 | a t ) # , (4) where a 0 denotes the ground-truth activation sequence and a t is the corrupted sequence obtained through the for ward masking process. The indicator function 1 [ · ] restricts the loss to masked positions only , allowing the model to leverage all unmaske d tokens as context when predicting activation states. The 1 /t weighting normalizes the expected number of masked positions, ensuring that the loss contribution remains balanced across dierent noise levels t . 18 B.3 Inference Procedure for Activation Span Prediction During inference, STRIDE predicts activation spans through an iterative reverse denoising process over the activation sequence. The process starts from a fully masked activation se quence a 1 = ( [M] , . . . , [M] ) of length W . Reverse denoising is then performe d through K discrete renement steps following a noise schedule 1 = t K > t K − 1 > · · · > t 0 . At each step from t k to t k − 1 , the mo del predicts activation tokens for all currently maske d positions conditioned on the video and query representations. A fraction ( t k − t k − 1 ) /t k of masked positions with the highest condence scores are rev ealed, while the remaining positions stay masked for further renement. Positions that have already b een revealed remain unchange d during the remaining denoising steps. Through this iterative predict-and- rene procedure, it progressively reconstructs the activation sequence and produces temporally consistent activation spans across the video timeline. T o support streaming inference, STRIDE maintains the activation sequence as a sliding windo w over the most recent W positions of the timeline . When a new frame at time T + 1 arrives, the windo w shifts forward: the oldest position is removed from the window , previously resolved activations are carried forward to their shifted positions, and a new slot corresponding to the incoming frame is app ended. T o v erify whether previously inferred activations r emain valid under the update d visual context V ≤ T +1 , STRIDE performs selective re-masking using a condence threshold τ . If the condence of a carrie d-forward decision excee ds τ , the activation is retained; other wise, the position is re- masked as [M] so that it re-enters the denoising process. The resulting masked set consists of both newly appende d positions and low-condence carried-forward positions, which are then rened through the same K -step denoising procedure described above . After the window is fully resolved, a trigger is issued only when an active span occupies at least a fraction γ of the activation window , where γ denotes the span ratio. Since the activation model processes the video stream at 1 FPS, the visual context grows linearly with elapse d time. T o prevent excessive computational overhead from unbounded context accumulation, we set the maximum context window size to 256 frames. When the accumulated context exceeds this limit, we retain only the most recent 128 frames and rebuild the context window from that point onward, ee ctively halving the temporal scope while pre- serving the latest visual evidence. Although cases where no trigger o ccurs for more than 256 consecutive seconds are rare in our evaluation benchmarks, this sliding window me chanism ensures that STRIDE remains deployable in arbitrarily long streams without memory overow . C Detailed Benchmark and E v aluation Setup C.1 Additional Benchmark Explanation C.1.1 OV O-Bench. O VO-Bench Niu et al. ( 2025 ) evaluates temporal awareness in online video understanding by posing questions at specic timestamps during a vide o stream, rather than after the entire video has be en obser ved. This timestamp- conditioned protocol reects a core challenge of streaming scenarios: the model must reason under partial obser v- ability , where future frames are not yet available at query time. The benchmark comprises 644 videos with 2,814 human-curated question-answer pairs across 12 tasks. The tasks are organized into three scenarios that capture distinct temporal reasoning patterns. Backward Tracing requires the model to recall and reason ab out past events, covering tasks such as EPM (Episodic Memory), ASI (A ction Sequence Identication), and HLD (Hallucination Detection). Real- Time Visual Perception tests understanding of what is currently happ ening at the query timestamp, with six tasks spanning spatial understanding (ST U), object recognition (OJR), attribute recognition (A TR), action recognition (A CR), optical character recognition (OCR), and future prediction (FPD). For ward Active Responding is the most distinctive scenario: the model receives a question whose answer dep ends on events that have not yet o ccurred, and must actively decide to wait rather than respond prematurely . This includes REC (Rep etition Event Count), SSR (Sequential Steps Recognition), and CRR (Clues Reveal Responding). Backward Tracing and Real- Time Visual Perception tasks adopt a multiple-choice format with accuracy as the evaluation metric. The Forward Active Responding scenario employs both accuracy-base d and score-based evaluation metrics thr ough a multiple-triggering evaluation pip eline that densely queries models along the temporal axis. This scenario is directly relevant to proactive streaming, as it requires the model to judge when sucient evidence has been gathered, a capability closely aligned with activation timing. 19 C.1.2 StreamingBench. StreamingBench Lin et al. ( 2024b ) is designed to evaluate streaming comprehension by presenting questions at dier- ent temporal positions within a video, simulating ho w a user might interact with a model during real-time playback. The benchmark contains 900 videos with 4,500 human-curated QA pairs (ve per vide o), evaluated across 18 tasks under three dimensions. Real-time Visual Understanding (10 tasks) covers a broad range of perceptual abilities in- cluding object perception (OP), causal reasoning (CR), clips summarization (CS), attribute perception ( A TP), event understanding (EU), text-rich understanding (TR), prospective reasoning (PR), spatial understanding (SU), action per- ception (A CP), and counting (CT). These tasks collectively test whether the model can track and interpret visual changes as the stream progresses. Omni-Source Understanding (4 tasks) requires integrating audio and visual sig- nals, with tasks on emotion recognition (ER), scene understanding (SCU), source discrimination (SD), and multimodal alignment (MA). Contextual Understanding (4 tasks) evaluates higher-level reasoning over accumulated context, in- cluding misleading context understanding (MCU), anomaly context understanding ( A CU), sequential question an- swering (SQ A), and proactive output (PO). The PO task is notable in that the model must determine the appropriate moment to respond without receiving an explicit user quer y , directly testing proactive timing capabilities. A response is considered correct only if the dierence b etween the actual output timestamp and the ground-truth timestamp is less than tw o seconds. All tasks follow a multiple-choice format with accuracy as the primary metric. Each question is evaluated on the video segment from the b eginning to the timestamp when the question is aske d, approximating streaming conditions. C.1.3 ET -Bench. ET -Bench Liu et al. ( 2024b ) is a large-scale benchmark for event-level video understanding that emphasizes ne- grained temporal localization over multi-event videos. The full b enchmark spans 7,300 samples across 12 tasks with 7,000 videos (251.4 hours) covering 8 domains. In our work, we evaluate on a subset of ve tasks that directly measure temporal b oundary prediction quality , which serves as a proxy for activation timing accuracy indep endent of the end- to-end streaming pipeline. The ve tasks we adopt are as follows. T emporal Vide o Grounding (T V G) requires localizing the temporal segment that matches a given text description within a vide o. Episodic Memory (EPM) extends this to ego centric scenarios, where the model must locate the moment relevant to a natural-language question ( e.g., “Wher e did I put my keys?”). T emporal Action Localization (T AL) involves detecting all segments containing a specie d action categor y , testing the model’s ability to identify repeated e vents with accurate b oundaries. Dense Video Captioning (D VC) requires jointly segmenting a video into events and generating a caption for each, evaluating both localization and description quality . Step Localization and Captioning (SLC) is similar but targets instructional videos, wher e the model must identify and describe sequential procedural steps. These tasks span grounding and dense captioning capabilities under the ET -Bench taxonomy , sharing the common requirement of precise event boundar y detection. T o evaluate temporal localization p erformance, we report the F1 score as the evaluation metric for all ve tasks. This metric directly measures how accurately the predicte d event boundaries align with the ground-truth segments, allowing us to assess the quality of activation timing produced by the model. C.2 Comparison with Autoregressiv e Baseline T o provide a fair comparison with autoregressive activation modeling, w e reproduce an autor egressive baseline (Baseline- AR) following the design describ ed in StreamBridge W ang et al. ( 2025a ). Since the original training code and model parameters are not publicly available, we implement the baseline ourselves and train it under the same experimental setting as STRIDE . In particular , the baseline uses the same backbone, training data, and input congu- ration, ensuring that the comparison primarily reects the dierence between autoregressive point-wise triggering and the proposed span-level denoising formulation. C.2.1 Architecture. W e adopt Qwen3- VL 2B as the backbone, processing up to 256 frames at 1 FPS to match the input conguration used in STRIDE . Following StreamBridge W ang et al. ( 2025a ), a learnable token is appended after the visual 20 embedding of each frame. The token is passed through a lightweight score head that p erforms binar y classication to predict whether a trigger should be issued at the corresponding time step. C.2.2 T raining & Inference. The training data is constructed from the same annotations use d for training STRIDE . For each annotated event segment, the last P % of frames within the segment are labele d as active (trigger-p ositive), while all remaining frames are labeled as inactive . T o expose the model to diverse activation patterns, P is randomly sampled from a uniform distribution over [0 , 50] for each training sample, following the training protocol of StreamBridge W ang et al. ( 2025a ). At inference time, the score head outputs a trigger probability for each frame independently . A xed threshold of 0.35 is applied to determine whether a trigger should be issued at each time step, following StreamBridge W ang et al. ( 2025a ). This point-wise de cision mechanism contrasts with STRIDE , which jointly denoises the activation sequence to produce span-level activation predictions. D A dditional Experimental Analysis D .1 Sensitivity Analysis for τ In a streaming setting, the activation windo w slides as new visual context arrives. T o re-evaluate previously resolved decisions against new visual evidence , we apply a condence-based retention threshold τ (see Selective Re-masking in gure 2 ). Here, τ = 0 unconditionally retains all prior decisions, while τ = 1 eectively rebuilds the activation window from scratch at every step. T o validate the ee ct of the Selective Re-masking threshold τ ( section 3 ), we evaluate performance on ET -Bench by sweeping τ from 0 to 1. Retent io n T hres hol d 𝝉 Score Difference from Task Ave rage Figure 5 Sensitivity of STRIDE to the retention constant τ across ve temporal understanding tasks (TVG, EPM, T AL, D VC, SLC) in ET -Bench Liu et al. ( 2024b ). The y -axis shows the score dierence relative to each task’s av erage. T ask-wise average scores are shown in the legend. As shown in gure 5 , unconditional inheritance ( τ = 0 ) results in the lowest scores, with a particularly large drop of − 19 . 7 pt on TV G. Performance peaks broadly in the range τ ∈ [0 . 75 , 0 . 85] across most tasks, after which tightening the retention criterion causes a gradual decline. Based on these observations, τ = 0 . 75 is used in all evaluations. D .2 Scalability Analysis for Activ ation Backbone T o examine how STRIDE scales with dierent size activation backb ones, we conduct an additional experiment by replacing the default Qwen3- VL 2B activation backbone with a larger size Qwen3- VL 4B mo del. The 4B variant is trained nder the same data and training conguration as the 2B model and evaluated across three downstream 21 Video-LLMs T eam et al. ( 2025 ); W ang et al. ( 2025b ); Bai et al. ( 2025a ) on O VO-Bench ( table 8 ) and StreamingBench ( table 9 ). Across all downstream backb ones, STRIDE -4B consistently achieves higher overall scores than STRIDE -2B, conrming that the activation backbone benets from increased model capacity and that the improvement transfers regardless of the downstream Video-LLM, supporting the scalability of the proposed plug-in design. T able 8 Scalability analysis on activation backb one scale ( STRIDE -2B vs. 4B) on O VO-Bench Niu et al. ( 2025 ) across multiple downstream Video-LLMs. Method Real- Time Visual Perception Backward Tracing Fwd. Act. Responding Overall OCR A CR A TR ST U FPD OJR A vg. EPM ASI HLD A vg. REC SSR CRR A vg. A vg. Gemma3-4B T eam et al. ( 2025 ) 65.8 48.6 56.0 36.0 66.3 50.0 53.78 44.4 41.9 3.2 29.83 14.4 61.4 52.5 42.77 42.13 + STRIDE -2B 73.2 60.6 64.7 39.3 71.3 56.5 60.93 47.8 52.0 4.8 34.87 42.6 64.6 60.0 55.73 50.51 + STRIDE -4B 75.2 56.9 67.2 40.4 67.3 56.5 60.58 51.5 48.0 4.3 34.60 46.5 66.2 60.0 57.57 50.92 InternVL3-8B W ang et al. ( 2025b ) 65.8 52.3 68.1 51.1 71.3 62.0 61.77 58.9 66.9 9.7 45.17 36.6 64.1 43.3 48.00 51.64 + STRIDE -2B 75.8 54.1 80.2 56.7 74.3 65.2 67.72 58.9 65.5 11.3 45.23 40.1 67.7 66.2 58.00 56.98 + STRIDE -4B 78.5 56.9 75.0 54.5 71.3 63.6 66.63 59.6 67.6 16.1 47.77 44.4 68.4 59.2 57.33 57.24 Qwen3- VL-8B Bai et al. ( 2025a ) 69.8 59.6 73.3 57.3 71.3 58.7 65.00 55.6 63.5 12.9 44.00 37.7 60.8 40.4 46.30 51.77 + STRIDE -2B 76.5 64.2 79.3 61.2 73.3 63.6 69.68 57.2 72.3 14.0 47.83 46.4 63.1 69.6 59.70 59.07 + STRIDE -4B 75.2 64.2 76.7 62.9 73.3 66.3 69.77 59.3 74.3 12.4 48.67 57.1 64.6 65.4 62.37 60.27 T able 9 Scalability analysis on activation backb one scale ( STRIDE -2B vs. 4B) on StreamingBench Lin et al. ( 2024b ) across multiple downstream Video-LLMs. Method Real- Time Visual Understanding Omni-Source Understanding Contextual Understanding Overall OP CR CS A TP EU TR PR SU ACP CT A vg. ER SCU SD MA A vg. ACU MCU SQA PO Avg. A vg. Gemma3-4B T eam et al. ( 2025 ) 63.8 69.5 68.8 54.4 60.2 65.1 59.3 40.7 62.7 21.8 57.49 28.8 31.2 30.4 46.4 34.20 34.4 31.2 38.8 12.4 29.20 40.30 + STRIDE -2B 66.8 71.9 66.6 57.2 66.5 70.7 60.2 43.1 65.0 23.8 60.00 35.6 31.6 36.0 44.0 36.80 33.6 35.2 44.8 41.6 38.80 45.20 + STRIDE -4B 66.2 63.3 68.1 58.1 67.1 71.7 63.0 41.5 66.7 21.2 59.93 32.8 30.4 36.0 46.4 36.40 35.2 36.8 48.0 44.0 41.00 45.78 InternVL3-8B W ang et al. ( 2025b ) 74.9 82.0 75.7 61.2 72.0 67.6 74.1 66.7 78.1 34.2 68.71 40.4 27.6 38.8 45.6 38.10 38.0 26.0 36.8 31.2 33.00 46.60 + STRIDE -2B 74.9 78.9 76.7 68.6 77.0 77.3 77.8 71.5 83.0 33.2 72.45 39.6 22.4 44.0 50.8 39.20 34.0 35.2 43.2 42.8 38.80 50.15 + STRIDE -4B 77.7 81.2 79.5 70.0 75.2 77.3 73.1 72.4 84.3 37.8 73.82 38.8 25.6 43.6 55.6 40.90 39.2 35.2 44.4 44.8 40.90 51.87 Qwen3- VL-8B Bai et al. ( 2025a ) 62.7 68.0 69.7 53.3 67.5 65.1 67.6 48.0 68.0 40.9 60.88 36.8 18.0 32.8 34.0 30.40 25.6 23.6 31.2 32.4 28.20 39.83 + STRIDE -2B 77.1 75.0 77.3 72.8 76.4 77.9 76.9 69.9 84.3 46.1 74.24 42.8 24.0 45.2 53.2 41.30 32.0 38.4 46.4 42.8 39.90 51.81 + STRIDE -4B 80.7 78.9 79.8 73.1 78.9 84.1 77.8 69.9 84.0 42.5 76.01 42.8 21.2 41.6 54.4 40.00 36.0 36.8 40.8 46.0 39.90 51.97 D .3 Qualitative Examples of STRIDE W e provide qualitative examples of activation span prediction on O VO-Bench, StreamingBench, and ET -Bench in gures 6 to 17 . Each example visualizes the temporal timeline of the vide o together with the query arrival time, the ground-truth event span, and the activation span pr edicted by STRIDE . These timelines illustrate ho w the model pro- gressively identies the rele vant event segment and aligns its activation predictions with the ground-truth temporal boundaries under streaming conditions. E Limitation and Discussion E.1 F ailure Cases and Discussion Although STRIDE improves temporal stability of activation decisions, several practical limitations remain in streaming deployments. First, the activation mo del op erates on sparsely sample d frames (1 FPS) and relies on downstream Video- LLMs whose streaming interfaces typically process visual tokens at relatively low frame rates. As a result, extremely short-lived events or rapid visual transitions may not b e fully captured by the activation window , since the visual evidence may disappear before sucient temp oral context is accumulate d. gure 18 illustrates such a case, where a brief visual e vent occurs between sampled frames and therefore cannot be reliably localized by the activation model. Another challenging scenario arises when queries refer to broad or loosely dened events rather than a single well- localized moment. In such cases, multiple candidate segments may partially satisfy the quer y semantics, leading to disperse d or multi-span activations. gure 19 presents an example where the mo del encounters several visually 22 plausible moments corresponding to the query , which may introduce ambiguity in determining the most appropriate triggering p oint. These obser vations suggest that proactive activation remains sensitive to b oth temporal sampling granularity and query specicity , highlighting dir ections for future improvements in streaming perception and quer y grounding. Question: Find event: "a shark is swimming under water" 0s 0s 3s 5s 8s 10s 13s 15s 18s 20s 23s 25s 28s 30s 33s 35s 38s 40s 45s 50s 55s 60s 65s 70s 80s 90s 100s 110s 120s 130s 140s 150s Figure 6 Qualitativ e example from ET -Bench (T VG). 23 Question: Find event: "a family is b eing recorded while having dinner" 0s 10s 15s 20s 25s 30s 40s 50s 60s 70s 80s 90s 97s 98s 100s 101s 103s 104s 105s 107s 108s 110s 111s 112s 114s 115s 117s 118s 120s 130s 140s 150s Figure 7 Qualitativ e example from ET -Bench (T VG). 24 Question: Find event answering: "How many pots did I see on the gas cooker?" 0s 12s 24s 33s 34s 36s 36s 37s 38s 39s 48s 60s 72s 84s 96s 108s 120s 132s 144s 156s 168s 180s 192s 204s 216s 228s 240s 252s 264s 276s 288s 300s Figure 8 Qualitativ e example from ET -Bench (EPM). 25 Question: Find all events of: "clean and jerk" 0s 10s 15s 20s 25s 29s 34s 39s 39s 43s 49s 54s 59s 64s 69s 74s 79s 80s 85s 89s 90s 95s 98s 108s 114s 118s 119s 124s 128s 133s 138s 147s Figure 9 Qualitativ e example from ET -Bench (T AL). 26 Question: Dense captioning: "making tomato soup" 0s 17s 33s 44s 50s 56s 66s 67s 79s 83s 91s 100s 103s 114s 116s 126s 133s 143s 149s 153s 164s 166s 174s 183s 185s 195s 199s 206s 216s 224s 232s 248s Figure 10 Qualitativ e example from ET -Bench (D VC). 27 Question: Step localization: "make a latte" 0s 2s 4s 7s 9s 10s 13s 16s 17s 20s 22s 24s 26s 29s 30s 32s 34s 35s 38s 42s 43s 45s 47s 49s 51s 52s 54s 56s 58s 60s 62s 64s Figure 11 Qualitativ e example from ET -Bench (SLC). 28 Question: what color was the phone? [0:38] Options: • A. blue • B. white • C. black • D. r ed 0s 34s 35s 36s 37s 38s 39s 80s 120s 160s 200s 240s 280s 320s 360s 400s 440s 480s 520s 560s 600s 640s 680s 720s 760s 800s 840s 880s 960s 1040s 1120s 1200s Figure 12 Qualitativ e example from O V O-Bench (EPM). 29 Question: What is the state of the person’s hand shown? [10:40] Options: • A. The person’s hand is shown with a bandage. • B. The person’s hand is shown with a tattoo. • C. The person’s hand is shown with a glove. • D. The person’s hand is shown with cuts and dirt. 0s 48s 72s 95s 119s 143s 167s 191s 214s 238s 262s 286s 310s 334s 358s 381s 405s 429s 453s 477s 500s 524s 548s 572s 596s 620s 638s 639s 640s 641s 667s 714s Figure 13 Qualitativ e example from O V O-Bench (OJR). 30 Question: What are these two people holding? [15:22] Options: • A. Black Camera • B. Silver round medal • C. Football • D. Platinum round medal 0s 49s 97s 146s 195s 243s 292s 341s 389s 438s 487s 535s 584s 633s 682s 730s 779s 828s 876s 900s 901s 902s 903s 904s 906s 907s 908s 909s 910s 911s 925s 973s Figure 14 Qualitativ e example from O V O-Bench (OJR). 31 Question: What material are the stairs made of ? [8:03] Options: • A. Metal. • B. W ood. • C. Marble. • D. Concr ete. 0s 42s 83s 125s 166s 208s 249s 291s 332s 374s 416s 457s 471s 472s 473s 474s 475s 476s 477s 478s 480s 481s 482s 483s 484s 485s 486s 487s 499s 540s 582s 623s Figure 15 Qualitativ e example from StreamingBench ( Attribute Recognition). 32 Question: What was the name of the café shown just now? [3:04] Options: • A. The Green Café. • B. The Fun Café. • C. Power Up Café. • D. Stage 52 Café . 0s 42s 83s 125s 165s 166s 168s 170s 173s 175s 178s 180s 183s 185s 188s 190s 193s 195s 198s 200s 203s 208s 249s 291s 332s 374s 416s 457s 499s 540s 582s 623s Figure 16 Qualitativ e example from StreamingBench (Object Recognition). 33 Question: What graphics card models are shown on the benchmarking results right now? [5:09] Options: • A. 4080 FE, 4090 Suprim X, 4090 Matrix. • B. 4090 FE, 4080 Suprim X, 4090 Matrix. • C. 4090 FE, 4090 Suprim X, 4080 Matrix. • D. 4090 FE, 4090 Suprim X, 4090 Matrix. 0s 26s 52s 78s 104s 129s 155s 181s 207s 208s 213s 218s 223s 228s 233s 237s 242s 247s 252s 257s 259s 262s 285s 293s 299s 304s 310s 311s 337s 349s 362s 388s Figure 17 Qualitativ e example from StreamingBench (T ext-Rich Understanding). 34 Question: When the cue ball touches the red ball, output "Red T ouched" . [6:33] 0s 20s 40s 61s 81s 101s 121s 141s 162s 182s 202s 222s 242s 263s 283s 303s 323s 343s 364s 384s 404s 424s 444s 465s 485s 505s 525s 545s 566s 586s 606s 626s Figure 18 Failur e Case from StreamingBench (Proactive Output). 35 Question: Please describe the scene that just o ccurred in the video. [7:43] Options: • A. A panda wearing pants me ditated in front of a cherry blossom tree and said, ’Hey there, ’ , I’m Po the Dragon W arrior . • B. A panda wearing pants close d its eyes and meditated in front of the cherr y blossom tree, saying ’Breathe ’ • C. A panda wearing pants closed its eyes and me ditated in front of the cherry blossom tree, then took a de ep breath and said ’Out through the mouth’ before exhaling • D. A panda wearing pants closed its eyes and me ditated in front of an apple tree, then took a deep breath and said ’Out through the mouth’ before exhaling 0s 40s 79s 119s 159s 198s 238s 277s 303s 305s 307s 310s 312s 314s 317s 334s 336s 338s 341s 343s 357s 396s 400s 402s 405s 407s 436s 476s 491s 494s 515s 555s Figure 19 Failur e Case from StreamingBench (Scene Understanding). 36
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment