Transient Stability of GFL Converters Subjected to Mode Switching of GFM Converters
Integrating grid-forming converters (GFMCs) into grid-following converter (GFLC)-dominated power systems enhances the grid strength, but GFMCs' current-limiting characteristic triggers dynamic mode switching between constant voltage control (CVC) and…
Authors: Bingfang Li, Songhao Yang, Pu Cheng
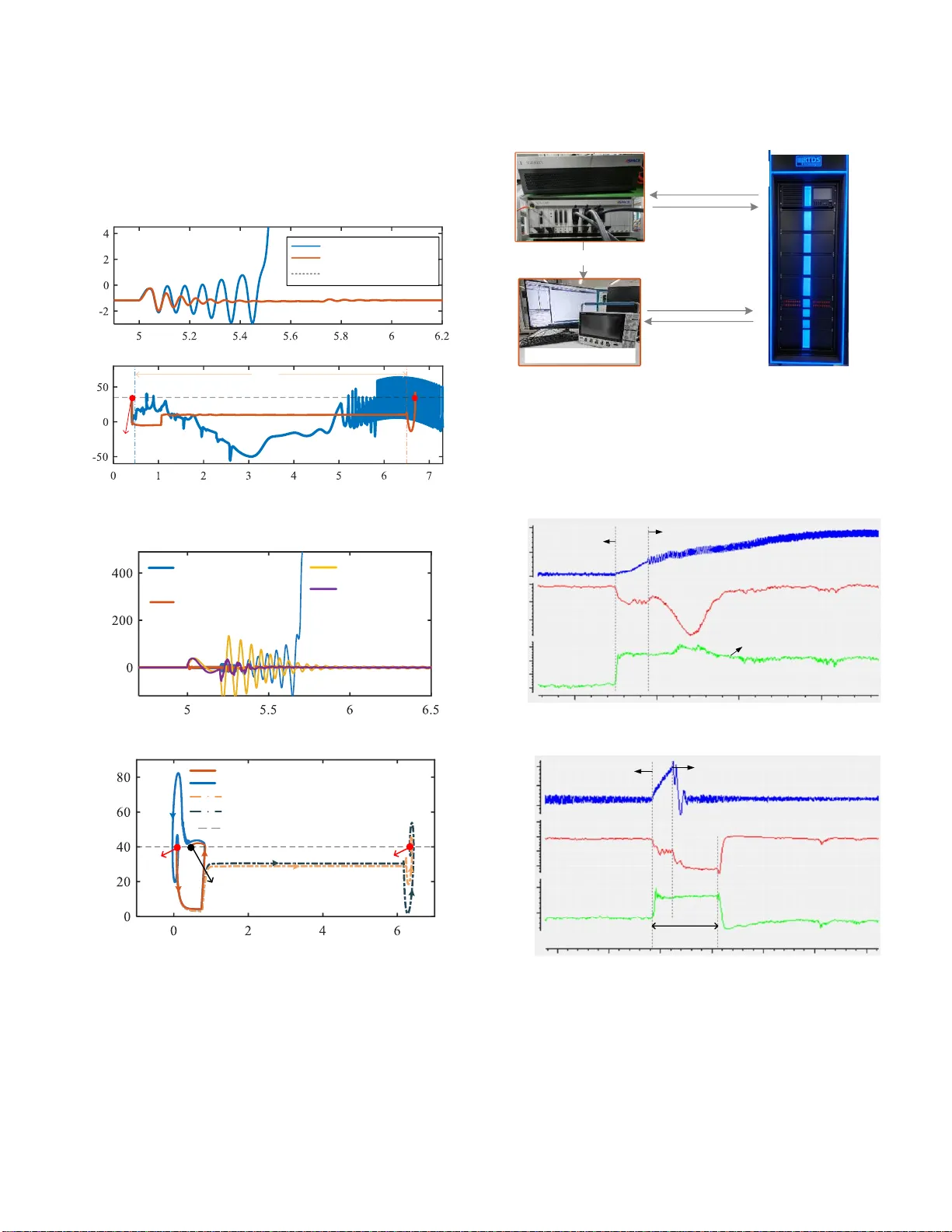
1 > REPLACE THIS LINE WITH YO UR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < T ransient Stability of GFL Converters Subjected to Mode Switching of GFM Converters Bingfang Li, Member, IEEE , Songhao Yang, Senior Member, IEE E , Pu Cheng, Graduat e Student Member, IEEE , Zhiguo Hao, Senior Memb er , IEEE Abstract — Integrating grid-forming converters (GFMCs) into grid-following converter (GFLC)-dominated power systems enhances the grid strength, but GFMCs’ current -limiting characteristic triggers dynamic mode switching between constant voltage control (CVC) and curre nt limit control (CLC). This switching feature poses critical transient stability risks to GFLCs, requiring urgent investigation. This paper first develops a mathematical model for this switched system. Then, it derives mode sw itching conditions for droop-controlled GFMCs, which are separately GFMC angle-dependent and GFLC angle- dependent. On this basis, the stability boundaries of GFLC within each subsystem are analyz ed, and the impact of GFMC mode switching arising from GFLC angle oscillation is investigated. The findings re veal that the sw itched system’s stability boundary coincides with that of the CLC subsystem. To enhance GFLC’s transient stability and ensure GFMC converges to the CVC mode, this paper introduces a virtual fixed d-axis control (VFDC) st rategy. Compared with existing methods, this method achieves decoupling and self-stabilization using only local state variables from individual converters. The conclusions are validated through simulations and Controller Hardware- in -the-Loop tests. Index Terms — Grid forming, Grid following, Phase locke d loops, Stability analysis, Power system control , Current limiter N OMENCLATURE U c1 ∠ δ 0 Voltage phasor of the GFMC. U c2 ∠ 0 Voltage phasor of the GFLC. U g ∠ 0° Voltage phasor of the infinite bus. I c1 ∠ c1 Current phasor of GFMC. I c2 ∠ c2 Current phasor of GFLC. Y c1 , L c1 Admittance, inductance between GFMC terminal and PCC. Y c2 , L c2 Admittance, inductance between GFLC terminal and PCC. Y g , L g Admittance, inductance between PCC and the infinite bus. α Defined as Y c1 / ( Y c1 +Y g ). Y 1g Defined as Y 1g =Y c1 Y g / ( Y c1 +Y g ). L v Defined as L c2 +(1- α )∙ L g . Defined as 1 / | Y g |+1 / | Y c1 |. 𝛾 Defined as 1 / | Y g |. d 1 -q 1 , APL rotating frame. d 2 -q 2 PLL rotating frame. x-y Synchronous rotating frame. 𝜔 c1 , 𝜔 c2 , 𝜔 g Angular freque ncy of APL, PLL , and infinite bus . ϖ Defined as 𝜔 c2 - 𝜔 g . δ AP L angle relative to the in finite bus. PLL angle relative to the in finite bus. δ ins , ins , Instantaneous angle of APL , P LL. c1 , 𝜂 1 Angles of GFMC current phasor relative to the infinite bus, to the d 1 -axis. c2 , 𝜂 2 Angles of GFLC current phasor relative to the infinite bus, to the d 2 -axis. c1* , 12* Current angles applying VFD C. δ L k , δ R k GFMC switching boundaries in period k . δ p Fixed AP L angle during PLL dynamics . θ V s , θ L s SEP angle of PLL in CVC, CLC su bsystem θ V max , θ V min Maximum, minimum stability boundary angles of the PLL in the CVC subs ystem. θ L max , θ L min Maximum, minimum stability boundary angles of the PLL in the CLC subs ystem. i dref c1 , i qref c1 GFMC current references. i dref c2 , i qref c2 GFLC current references. i dref c1* , i qref c1* GFMC current references a pplying VFDC. i dref c2* , i qref c2* GFLC current references appl ying VFDC. i d 1 c1 , i q 1 c1 GFMC d 1 -axis, q 1 -axis currents. i d 2 c2 , i q 2 c2 GFLC d 1 -axis, q 1 -axis currents. i d 2 c1 , i q 2 c1 d 2 axis, q 2 axis components of I c1 ∠ c1 . i d 2 c2ij Current coupling term bet ween GFLCs I max c1 Maximum GFMC current li mit. I ref c2 GFLC current reference am plitude. u q 2 c2 q 2 -axis component of U c2 ∠ 0 . u q 2 c2(V) , u q 2 c2(L) q 2 -axis component of U c2 ∠ 0 in CVC, CLC. k 2p , k 2I Proportional and integral gain of PLL . P ref c1 , P c1 Reference, actual active power of GFMC. P CVC c1 , P CLC c1 Active power of GFMC in C VC, CLC. P CLC c1* Active power of GFMC in C LC with VFDC P V Ec2 , P L Ec2 GFLC equival ent electromagnet ic power in the CVC, CLC subsystem. P V Mc2 , P L Mc2 GFLC equivalent mechanical power in the CVC, CLC subsystem. T V c2 , T L c2 GFLC equivalent inertia time constant in the CVC, CLC subsystem. D V c2 , D L c2 GFLC equivalent damping coefficient in the CVC, CLC subsystem. D L c2* GFLC equivalent second-order damping coefficient in the CLC subsyst em. Γ V , Γ L , Γ L1 , Γ L2 Vector trajectories. V Transient energy of PLL. V V max , V L max Critical energy of PLL in CV C, CLC. This work was supported b y th e Key Research and Development Program of Shaanxi Province (2025PT-ZCK- 01 ). The autho rs ackno wledge J. Guo fro m th e Shaanxi Key Laboratory of Smart Grid for providing access to the instruments that supported this work. B. Li, S. Yang, P. Cheng , and Z. Hao are with Xi’an Jiao tong University, Xi'an 710049, Ch ina (e - mail: libingfang @stu.xjtu.edu.cn; so nghaoyang@xjtu.edu.cn; zhghao@xjtu.edu.cn). 2 > REPLACE THIS LINE WITH YO UR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < ∆ V o Periodic energy increment of PLL. ∆ V E p , ∆ V F p Potential energy discontin uities at E and F . ∆ V D Periodic change in V due to d amping. Z virtual Virtual impedance of GFMC . I. INTRODUCTION HE integration of ren ewable energy sources into modern power grid is rapidly increasing, primarily using grid following converters (GFLCs) for grid connections [1] ,[2]. Extensive stud ies indicate that systems with high penetration of renewable energy and long- distance power transmission are significantly more susceptible to wide-band oscillations and f requency/voltage accidents [1],[3]. Moreover, major blackouts like the recent “4.28” incident in Spain[4] starkly illustrate that weak disturbance rejection of GFLCs is a key trigger for widespread outages. Consequently, grid-forming (GFM) devices are suggested to be deployed within renewable energy stations to bolster the strength and inertia of the sendin g-end system[5],[6]. In grid-connected scenarios, the outer control loop of grid forming converters (GFMCs) responsible for grid- synchronization is ref erred to as the active power loop (APL). This loop can be implemented via different mechanisms, primarily droop control [7] or virtual synchronous Generator (VSG) control [8] ,[9] . As is widely recognized, droop- controlled GFMCs are dynami cally equivalent to VSGs if a low-pass filter (LPF) is a pplied in the power feedback signal; both emulate the swing dynamics of synchronous generators (SGs) to provide inertia support. However, the resulting second-order dynamics make them susceptible to transient angle instability. In contrast, first-order droop-controlled GFMCs (i.e., implemented without an LPF in the APL) are inherently stable if a stable equilibrium point (SEP) exists. Thus, despite exhibiting minor steady-state errors, the unconditi onal transient stability and simplified architecture of first-order droop control make it a hi ghly promising technology. H ow ever, GFMCs can switch from constant vo ltage control (CVC) mode to current limit control (CLC) to avoid overcurrent during transients[11] . This switching behavior transforms the GFLC-dominant system into a switched syst em, po sing new challenges to GFLCs’ transient stability . Current research on the transient stability of this co -located system primarily focuses on GFLCs operating in parallel with S Gs or VSG- GFMCs. F or i nstance, S hen et al . [12] investigate the impact of GFLC’s fault current angle on VSG -GFMC sta bility; however, it does not address the transient stability of GFLC’s phase - locked loop (PLL). Previous studies [13] , [14] examine the stability issues of GFMC and GFLC. Specifically, the work in [13] focuses on the impact of voltage drops at the point of common coupling (PCC), caused by GFMC angle swings, o n the PLL stability. Xu et al . [14] investigate the dynamic interaction between GFMCs and GFLCs using the phase trajectory method. However, these studies overlook the impact of GFMC’s current lim iting control on the transient sta bility of nearby GFLCs. In such systems, in a ddition to the transi ent instability issues faced by PLLs, the system’ s potential fail ure to ultima tely stabilize in CVC mode presents another significant concern. Therefore, measures to enhance system stability need to address two key aspects: PLLs’ transient stability and GFMC stabilization at the desired SEP. To enhance PLL stability in multi-GFLC systems, studie s [15], [16] have proposed two different current distribution or injection methods. However, the se approaches require comprehensive global information, wh ich increases the complexity of imple mentation. Regarding the issue that GFMC stabilizes at the CLC rather than the CVC after fault clearance, Zhuang et al . [17] pro pose an anti-windup control strategy. But Li et al . [18] further demonstrate that, even with such control, GFMC stabilization in CVC mode hinges on the AP L angle at fault clearance. It then proposes a method to calculate a GFMC current saturation angle that e nsures its SEP is precisely within the CVC region. How ever, thi s approach introduces si gn ificant complexity, as its calculation r equires system-wide in formation and contin uous updates based on the GFLC’s operating state. For stability enhancement control in GFLC and GFMC co- located systems, the current angle coordination of converters proposed in [12] requires real-time communication and is mainly focused on improving VSG-GFMC stability. The additional power control for GFMC proposed in [13] does not aim to a ddress its stabilization at the correct SEP. Therefore, an approach that concurrently addresses both the transient stability of GFLCs and desired equilibrium point restoration for droop - controlled GFMCs warra nts further investigation. To bridge these gaps, this paper investigates the impact of first-order dro op-controlled GFMC mode switching on the transient synchronization stability of GFLCs and further proposes a stabili ty enhancement control strategy. The main contributions are as follows: 1) A mat h model for the switched system is established, where PLL dynamics are considered predominant, and AP L dynamics define the switching conditions. Two sw itching conditions for droop-controlled GFMC are identified: “GFMC angle - dependent Switching” and “GFLC angle - dependent Switching”. This enables the analysis of the interactive coupling effects between the PLL and APL. 2) The mechanism by which GFMC mode switching affects GFLC transient stability is elu cidated. The study involves a comparison of PLL stability boundaries, encompassing the GFLC stability characteristics within the CVC and CLC subsystems and the influence of inter-subsystem mode switching on G FLC transient stability. This reveals that the transient stabili ty of GFLC is const rained by the stability boundary of the CLC subsystem. 3) The Virtual Fixed d-axis Control (VFDC) method was proposed. This method e nhances the transient stabili ty of multiple GFLCs and ensures GFMC adaptive stabilization in CVC mode, utilizing onl y local state feedback. The remainder of this paper is organized as follows. Section II details the mathematical model of the switched system. Section III then presents a theoretical analysis covering SEPs, the stabili ty of each subsystem, and the impact of the mode switching process. Section IV introduces the proposed control strategy and provides it s theoretical validations. Section V T 3 > REPLACE THIS LINE WITH YO UR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < presents the simulation and experimental results. A thorough discussion is offered in Section VI, and Section VII concludes the paper. II. S WITCHED S YSTEM M ODELING In the co -l oc ated system shown in Fi g. 1 , the PLL’s dynamic behavior is profoundly influenced by external mode switching events, namely the transitions of the GFMC between CVC and CLC modes. This section develops a model for the switched system in which PLL dynamics are considered the dom inant factor governing system stability. The dynamics of the inherently stable droop-controlled GFMC define the switching conditions for the switched system. Consequently, the system operates within it s CVC subsyst em when the GFMC is in CVC mode, and within its CLC subsystem during CLC mode operation. GFLC Infinite bus PCC Filter PWM PLL Outer Loop Con trol LVRT Control Inner Loop g 0 U g Y Filter PWM APL Voltage Control Loop Current Saturation Current Control Loop c1 c1 I GFMC c2 c2 I c2 0 U c1 0 U 1 d c1 i c2 Y 2 d c2 i 2 q c2 i c1 Y 1 q 1 c i ( L g ) ( L c1 ) ( L c2 ) dref qref c 2 c 2 , ii dref qref c1 c 1 , ii ins ins (a) system topology and control structure + − k 1p c1 - g CVC CLC ref c1 P c1 P CVC c1 P CLC c1 P 1 s (b) control scheme of AP L Park U c2 0 k 2p Σ c2 - g 2 d c2 u 2 q c2 u 2I s k 1 s (c) control scheme of PLL Fig. 1. Topology and control structure of the co -located system A. Co-located System Overvi ew Fig. 1 depicts a topology of a GFLC-dominated renewable energy transmission system that incorporates droop-controlled GFMCs. These converters are aggregated at the same Point of Common Coupling (PCC) and connect to the receiving-end grid via AC transmission lines. U c1 ∠ δ 0 , U c2 ∠ 0 , U g ∠ 0° denote the voltage phasors of the GFMC terminal, the GFLC terminal, and the infinite bus. I c1 ∠ c1 , I c2 ∠ c2 , and I g ∠ g are the corresponding branch currents, while Y c1 , Y c2 , and Y g are the branch admittances. The branch inductances are denoted as L c1 , L c2 , and L g . Notably, for the centralized GFMCs, a master converter can generate control signals that the slave converters then follow[19]. This strategy mitigates potential control conflicts and the effects of circulating currents, allowing these multiple GFMCs to be effectively represented as a single- machine equivalent model for analytical purpo ses. Furthermore, to elucidate the fundamental mechanism by wh ich GFMC mode switching impacts GFLC stability, GFLCs are also represented by aggregate d models in the theoretical analysis, as shown in Fig. 1(a). However, for th e subsequent control design and experimental validation stages, multi-GFLC models are employed to ensure the rel iability of the research conclusi ons. In Fig. 2(a), the d 1 -q 1 , d 2 -q 2 , and x-y coordinate systems are the AP L, PLL, and synchronous rotating frames, rotating at angular speeds 𝜔 c1 , 𝜔 c2 , and 𝜔 g , respectively. The angles δ and show how d 1 and d 2 lead the x -axis, corresponding to the output angles of the AP L and PLL. 𝜂 1 and 𝜂 2 are defined as angles by which I c1 ∠ c1 (in CLC mode) and I c2 ∠ c2 lead the d 1 and d 2 axes, respectively. x y d 2 q 2 d 1 q 1 g 1 2 c2 (in CLC) c1 c 2 c2 I c1 c1 I c1 c2 Fig. 2. Relation of reference axes and system vectors B. Dynamic Model of the Swit ched System To facilitate analysis and focus on the primary issue of stability determination, the following reasonable assumptions are made: 1) In co-located syst ems, the GFMC is expected to provide a stable voltage and angle reference to facilitate robust phase locking by the GFLC [6]. Therefore, with proper parameter design, the bandwidt h of the GFMC’s AP L should be significantly smaller than that of the PLL. Concurrently, the voltage and current control loops are designed to be significantly faster than the PLL dynamics. Otherwise, undesirable dynamic coupling and small-signal stability issues would arise [19],[21],[22]. Consequently, when analyzing the GFLC ’ s PLL dynamic response, the GFMC ’ s angle δ can be considered quasi-constant, and its voltage a nd current control loops can be assumed to have converged [21],[22]. 2) In typical weak sending-end systems, the electrical coupling between the GFMC and the PCC is significantly stronger than that between the PCC and t he receiving-end grid. Furthermore, GFMCs in weak sending-ends are expected to provide substantial short- circuit current support [5],[13], which necessitates a small virtual and physical impedance between GFMC and PCC. Thus, we assume Y c1 >> Y g . 3 ) Line resistances are neglected in comparison to line reactance [8],[23],[24]. The PLL control scheme is show n in Fig. 1(c), and its control 4 > REPLACE THIS LINE WITH YO UR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < equations can be written as: 2 2 c 2 g q q c2 2 I c2 2 p d d dd dd t u k u k tt = − = = + , (1) where k 2p and k 2I are the proportional and integral coefficients of the PLL; u q 2 c2 represents the component of U c2 ∠ 0 along the q 2 -axis in the d 2 -q 2 coordinate system, wh ich is influenced by the GFMC’s switching mode. If the GFMC current re ference from the voltage control loop is below its upper limit, U c1 ∠ δ 0 aligns with the d 1 -axis, with the d 1 -axis component controlled to U c1 and the q 1 -axis component set to zero. This is known as CVC. If the current reference reaches its maximum, I max c1 , the converter switches to CLC mode. This paper adopts a pr iority- based current limiter, as detailed in [10],[18]. During CLC operation, the saturation current angle 𝜂 1 (relative to the d 1 -axis ) is a configurable parameter, allowing for flexible prioritization strategies. The active power of the GFMC in CVC and CLC modes is denoted as P CVC c1 and P CLC c1 , respectively, with their expressions given as: ( ) ( ) CVC c1 c1 g 1g c 1 c 2 2 CLC m ax max c1 g c1 c1 c1 c 2 g c 2 c1 sin cos cos | | sin P U U Y U I P U I I I Y = − − = − − , (2) where α=Y c1 / ( Y c1 +Y g ), Y 1g =Y c1 Y g / ( Y c1 +Y g ). Accordingly, within the C VC subsyst em, u q 2 c2 and its ti me derivative (de noted as u q 2 c2(V) and d u q 2 c2(V) /d t ) are derived as: ( ) ( ) ( ) ( ) ( ) ( ) 22 2 2 qd c 2 g c 2 V q c 2 V d g c1 v c 2 c 2 v c1 sin ( 1 ) sin d d 1 co s co s 1 dd u L i U u U U L i tt U = − − − − = − − − − + − ,(3) where i d 2 c2 represents the acti ve current of the GFLC; L v = L c2 +(1- α ) ∙ L g . Similarly, within the CLC subsyste m, u q 2 c2 and its time derivative (denoted as u q 2 c2(L) and d u q 2 c2(L) /d t ) are derived as: ( ) ( ) ( ) ( ) ( ) 22 2 22 2 2 dd g c 2 g c1 c 2 g c2 c 2 q c 2 L d q d g c g c1 g g c1 g c 2 c 2L 2 q sin d dd co s d d d u U U L i L L i u L i L i L L i t t t ++ + − =− = + + + + + ,(4) where i d 2 c1 and i q 2 c1 are the projections of the GFMC current onto the d 2 -axis and q 2 -axis, respectively. The y are expressed as: ( ) ( ) 22 dq c 1 c1 c 1 c 1 c1 c 1 c o s si n i I i I = − = − , . (5) Substituting (3) and (4) into (1), the dynamic equations of t he switched system are obtai ned as follows: V V V Mc 2 Ec 2 V c2 L L L L 2 Mc 2 Ec 2 L c2 c2 2 2 c 2 c 2* 1 ( ) in CV C su bsy stem ( ) in CL C subs d y stem d 1 dd P P D T P P D D T tt == −− − − − , , , (6) where P V Ec2 , P V Mc2 , T V c2 , and D V c2 are the terms i n the C VC subsystem; P L Ec2 , P L Mc2 , T L c2 , D L c2 , and D L c2* are the terms in the CLC subsystem. For detailed expressions for these variables , please refer to Appendix A. C. Switching Conditions The most fun damental condit ion for the GFMC to switch from CVC mode to CLC mode is whether its current amplitude I c1 equals the ma ximum allowable value I max c1 . After fault clearance, this switching conditi on is: ( ) ( ) ma x c1 c1 c1 0 c1 1 c 2 g g c1 0 I Y U I I Y U I = − + + − = (7) To facilitate the analysis of GFMC mode switching dynamics, the condition i n (7) needs to be e xpressed using state variables. As (7) indicates, this switching condition is influenced by both δ and . Consequently, the system’s switching conditions will be derived based on their dependence on the GFMC angle and the GFLC angle, respectively. 1) GFMC angle-dependent Switching Conditions In the CVC subsystem, the AP L angle is the phase angle of the voltage constructed by the GFMC, so δ = δ 0 , where δ 0 is the voltage angle a t node ① in Fig. 1(a). Substituting th is condi tion into (7), the range of δ that keeps the CVC su bsystem active is: ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) R LR L g g c2 c2 c2 c2 2 2 2 2 max c1 g 2 c 1 1g g c2 g c2 22 2 c1 c2 g g c1 g c1 c2 g c2 arcc os / 2 2 , , arcc os / 2 2 , | | sin cos with | | 2 | | sin 2 | | 2 8 | t | si ar a n cn k kk k cg d k k Z d k k Z Y U I I U U I Y I Y U I Y d U I Y U U U U I Y = + − + = − + − + − + = + − − = +− . (8) In (8) , δ = δ L k and δ = δ R k define the mode switching boundaries for the system in perio d k , which are also the GFMC angle- dependent switching conditions. This results in an alternating pattern of CVC and CLC intervals in the P c1 - δ plane, as shown in Fig. 3, where P c1 represents the active power of the GFMC. After fault cle arance, if δ L k < δ < δ R k , the CVC subsyst em is activated, and GFMC operates following the P CVC c1 - δ curve (the blue solid line). Otherwise, the CLC subsystem is activated, and its operating trajectory follows the P CVC c1 - δ curve (the red solid line). CLC C urve CLC CLC CVC SEP of CLC SEP of CVC Trajec tory in C LC H 3 M H 1 P c1 CVC c1 P CLC c1 P R k L k H 2 H 4 SEP of CLC N 1 N 0 Trajec tory in CVC CVC Cur ve L k R k L 1 k + Fig. 3. GFMC angle-dependent Switching cond itions on the P c1 - δ plane Eq .(8) shows that the PLL angle influences the GFMC’s switching conditions through c2 . If the PLL is converged, equals 0 . Here, 0 is not an independent variable but rather a dependent variable that changes with δ . Thus , δ L k and δ R k remain constant. However, if the PLL has not converged, δ L k and δ R k will fluctuate with . 2) GFLC angle-dependent Switching C onditions The GFLC angle-dependent switching condition for the fast variable is subsequently derived. According to Fig. 1(a), U c1 ∠ δ 0 can be expressed as: ( ) ( ) c1 0 g 1 c1 c 1 c 2 c 2 0 90 90 U U I I = + + + + , (9) 5 > REPLACE THIS LINE WITH YO UR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < where = 1 / | Y g |+1 / | Y c1 |; = 1 / | Y g |. As per (9) , U c1 ∠ δ 0 is the s um of the grid vo ltage vector U g ∠ 0° and the linearly transformed current vectors of both the GFMC and GFLC. This is valid for both the CVC and CLC subsystems, as shown in Fig. 4(a) and (b). However, they differ in that: in the CVC subsystem, the GFMC’s voltage magnitude U c1 is maintained constant (meaning the l ength of t he black vector in Fig. 4(a) is fixed); in contrast, for the CLC subsystem, the GFMC’s maximum current amplitude I max c1 remains constant (meaning the length of the blue vector in Fig. 4 (b ) is fixed). Therefore, in the CVC subsystem, the terminal of U c1 ∠ δ traces an arc with a radi us of U c1 , forming the trajectory Γ V . By contrast, in the CLC subsystem, the endpoint of β 1 I max c1 ∠ ( c1 +90° ) forms a circle centered at ( U g ,0) with a radius of β 1 I max c1 , denoted as Γ L1 . U g 0° U c1 δ 0 β 1 I c1 ( c1 +90° ) γ I c2 ( c2 +90° ) O Γ V x δ 0 = δ ( U g ,0) (a) Vectors in CVC β 1 I c1 max c1 O x δ 0 Γ L1 β 1 I c1 max ( c1 +90° ) (b) Vectors in CLC Fig. 4. Phasor diagrams in CVC and CLC subsy stems. U g 0° β 1 I c1 max ( c1 +90° ) δ 0 = δ p O x C L2 2 + γ I c2 ( +) U c1 δ p Γ L1 Γ L2 C V Γ V δ p (a) CVC to CLC transition poin t δ 0 = δ p O x C L1 + Γ L1 Γ L2 C V Γ V δ p (b) CLC to CVC transition poin t Fig. 5. Phasor diagram of GFLC angle-depen dent Switching conditions. The analysis below explains why PLL oscillation can cause system mode switching. In Fig. 4, the red vector, γ I c2 ∠ ( c2 +90 ︒ ), has a li near rela tionship with I c2 ∠ c2 . Due to c2 = + 𝜂 2 , this red vector rotat es along with the PLL osc illation. In the CVC subsystem, as the red vector rota tes, the magnitude and angle of the blue vector adjust to maintain a constant magnitude for U c1 ∠ δ , th us preserving CVC mode. However, if the red vector rotates to a position where the endpoint of U c1 ∠ δ cannot fall on Γ V irrespective of the blue vector ’ s variation within Γ L1 , the system will then s witch from CVC to CLC. Given the dynamic decoupling of slow variable δ and fast variable , we fix δ=δ p to identify the critical values at the mode switching instant. After fault clearance, all the phasors change continuously until the current saturation angle undergoes an abrupt change (typically following current magnitude saturation). Thus, the phasor diagrams are identical at the pre- and post-switching instants ( t - and t + ), provided this discontinuity has not yet occurred. Furthermore, since δ is continuous, the following rela tionships hold for GFMC angles: 1) For transitions from CVC to CL C: ● The pre-switching voltage an gle aligns with δ p : δ ( t - )= δ p . ● The post-switching current angle, after subtract ing the current factor angle 𝜂 1 , aligns with δ p : δ ( t + )= δ p . ● Conse quently, δ ( t - )= δ ( t + ) - 𝜂 1 = δ p . 2) For transitions from CLC t o CVC: ● The pre-switching current angle, after subtracting the current factor angle 𝜂 1 , aligns with δ p : δ ( t - )= δ p . ● The post-switching voltage angle aligns with δ p : δ ( t + )= δ p . ⚫ Consequently, δ ( t - )- 𝜂 1 = δ ( t + ) = δ p . Based on these conditions, t he phasor relatio nships for CVC- to -CLC switching are shown in Fi g. 5(a), a nd for CLC- to -CVC switching in Fig. 5(b). Let 1 and 2 denote the PLL angles at the CLC → CVC and CVC → CLC switching instants, respectively. From the geometric relationships, we can solve for: ( ) ( ) ( ) ( ) ( ) ( ) 2 2 2 max 2 1 1 c1 2 1 2 1 2 max 1 1 c1 2 2 2 2 max 2 1 1 c1 2 2 2 arcco s 2 arc cos 22 c g c gc c g c cg U I U I U U I I U U I IU − + − = − + − + − − =− , ( 10 ) Thus, the mathematical model of the switching system is established. Eq.(6) serves as the system’s governing dynamic equation. Eqs.(8) and ( 10 ) specify the GFMC angle-dependent switching condition and the GFLC angle-dependent switching condition of GFMC, respecti vely. I II . T RANSIENT S TABILITY A NALYSIS OF S WITCHED S YSTEM This section analyzes the transient stability of this switched system, examining its correct SEPs, the transient stability of each subsystem, and the impact of mode switching processes. A. Stable Equilibrium Points of the Switched System Define ( θ V s , 0) and ( θ L s , 0) as the SEPs for the CVC and CLC subsystems, respectively. Herei n, 6 > REPLACE THIS LINE WITH YO UR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < 2 d g v c 2 c V 1 s arc sin Li U =+ , ( 11 ) ( ) 22 dd g c1 g c 2 c 2 L s g gg arcsin L i L L i U ++ = . ( 12 ) After the fault is removed, it is expected not only that the system will be stable, but also that it will stabilize at the SE P of the CVC subsystem rathe r than that of the CLC subsystem. Fig. 3 indicates that the system’s ultimate stabilization locati on depends on the operating point’s position at th e instant of fault clearance. If operating points at fault clearance are H 1 and H 3 , the sy stem can return to the SEP of the CVC subsystem (point M ) alon g traj ectories ① and ③ , respectively. However, if points are H 2 and H 4 , the system will stabilize in the CLC subsystem along trajectories ② and ④ , respectively. Therefore, if the system is in the CLC subsystem at the m oment of fault clearance, there is a risk of i t settling at the undesir ed SEP. B. Comparison of Two Subsys tems’ Stabilit y Boundaries The transient stability boundaries of the switched system in the CVC and CLC subsystems are comparatively analyzed next. ( ) sin − sin ( ) V f ( ) L f V Mc 2 P L Mc 2 P L max V max L s V s V max V L max V L min V min (a) Stability regions in CVC and CLC su bsystem A rea d ecreas es (b ) Impact of increased slop e on transient energy A r ea d e cr e as es (c ) Impact of increased in tercept on transient energy Fig. 6. Critical energy comparison between CVC and CLC sub system. T he PLL’s Lyapunov function can be chosen as [25]: ( ) ( ) { V,L} s V,L V,L Ec 2 Mc 2 V,L 2 c2 1 ,d 2 V PP T = + − , ( 13 ) where the superscript {V, L} denotes variables either i n the CVC or CLC subsystems. Ignoring the second-order damping in (6), the time derivation of ( 13 ) is d V /d t =- D {V,L} C2 ϖ 2 . T he equilibrium point is stable if d V /d t is non-positive definite. This i s equivalent to the energy increment over one cycle (denoted as ∆ V ) being less than 0, which further im plies that: s s 2 V,L V,L V ,L V, c 2 s 2 c 2 c 0 c2 L s d 0, d d 0 d 0, t D D D D Vt = − = − ( 14 ) By substituting the expressions for D V c2 and D L c2 into ( 14 ) , the condition for ∆ V <0 is derive d as: ( ) ( ) ( ) ( ) ( ) ( ) V V s V s L V L L s L s sin , if In CVC su bsy stem sin , if sin , if In CL C subsy stem sin , if f f f f − − , ( 15 ) where li near functions f v ( ) and f L ( ) are expressed as ( ) ( ) ( ) ( ) ( ) ( ) 2 2 2 2 2I V 2p 2 I g c 2 2 I g g g d d q LL L s c 2 c1 c1 s 2p d VV v s c 2 s c1 g 2 p g g sin sin k f k k L L k L L f i i i k U k U U L i U =− + = + + + − − + ( 16 ) E q. ( 15 ) has clear geometric significance. A piecewise comparison between the sine function and the linear function can determine the size of the stability region. As illustrated in Fig. 6(a), the absolute stability region for the CVC subsystem is θ V min < θ < θ V max , whereas for the CLC subsystem, it is θ L min < θ < θ L max . In othe r w ords, the PLL is considere d stable in CVC (CLC) if θ does not exceed θ V max ( θ L max ) when ϖ =0. The critical energies for stability in the CVC and CLC subsystems are found by substituting θ V max and θ L max into ( 13 ), yielding V V max and V L max , respectively. Numerically, V V max and V L max correspond to the green and red shaded areas in Fig. 6(a). A c omparison of these values is then presented. Fig. 6(b) and (c) demonstrate that increasi ng the slope and intercept of the linear function reduces the critical energy. In large-scale renewable energy sending end systems, the GFLC typically acts as the primary power source, with the GFMC serving as supportin g equipment. Conse quently, i d 2 c2 is larger than i d 2 c1 and i q 2 c1 . This means the slope of f L in ( 16 ) is pr imarily dictated by the term containing i d 2 c2 . Given that L g + L c2 > L v = L c1 +(1- α ) ∙ L g , the slope of f L is steeper than that of f V . Furthermore, since V V max is independent of δ according to ( 11 ) , ( 15 ), and ( 16 ), we can set δ =0 without l os s of generality. Under this condition, and because P L Mc2 > P V Mc2 , the intercept of f L exceeds that of f V . Therefore, as illustrated in Fig. 6 (a), the system stability in the CLC subsystem is significantly weaker than in the CVC subsystem. C. Impact of GFMC Mode Swit ching on Transient Stability Given that the PLL’s dynamics are much faster than those of AP L, GFMC angle-dependent switching has a limited impact on the PLL dynamic timesc ale. Its primary effect is inste ad reflected in the system’s initial state at fault clearance, determining whether it is in the CVC or CLC subsystem. Therefore, the subsequent analysis will focus on the impact of GFLC angle-dependent switching, which incorporates the interplay between PLL dynamics an d GFMC mode switching. Analysis in Section II.C shows that in the PLL dynamic timescale, the CVC subsystem activates at = 1 and the CLC subsystem activates at = 2 . Notably, 1 and 2 maintain a 7 > REPLACE THIS LINE WITH YO UR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < specific relationship with θ V s , namely 1 < θ V s < 2 . The detailed proof is in Appendix B . Next, we analyze how t he mode switching dy namic aff ects transient energy changes. Fig. 7 shows the P V Ec2 - curve (red) a nd P L Ec2 - curve (bl ue). Point B ’ i n the figure has an angle of θ V s , while points E and F have angles 1 and 2 , respectively. A switch from the CLC to the CVC subsystem is represented by the transition from E to E’ . Similarly, switching from the CVC to the CLC subsy stem is depicted as a transition from F to F’ . T he system’s transient energy in ( 13 ) consists of two components: equivalent kinetic energy and e quivalent potential energy, which correspond to the first and second terms on the right-hand side of the equation, respectively. As de picted in the PLL’s control scheme in Fig. 1(c), ϖ is the output signal of the PI controller. Since the proportional gain ( k 2p ) is typically much smaller than the integral gain ( k 2I ), ϖ is predominantly determined by the integral action. Due to the inherent lag of the integrator, ϖ remains approximately constant at the instant of system mode switching. Consequently, the kinetic energy is virtually unchanged immediately before and after mode switching. Thus, any change in the system’s total energy across the mode switching instant is primarily due to changes in its potential energy. E F δ p 0 2 A B A B C D G D Δ S V Δ S L F E C (CLC) (CVC) (CLC) (CVC) L Mc 2 P V Mc 2 P V Ec 2 P L Ec 2 P V s L s Fig. 7. Mode switching dynamics on the P {V,L} Ec2 - plane Let ∆ V o denote the overall periodic e nergy increment for the full switching sequence from CLC to CVC and then back to CLC. The potential energy discontinuities at points E and F are represented by ∆ V E p and ∆ V F p , respectively. T he periodic e nergy change attributable to dampi ng is denoted by ∆ V D . Thus, ( ) ( ) ( ) ( ) 11 VL ss p 22 LV ss p V V L L Ec 2 Mc 2 Ec 2 Mc 2 VL c 2 c 2 L L V V Ec 2 Mc 2 Ec 2 Mc D 2 LV c 2 c o 2 11 dd 11 dd E F V V P P P P TT P P P P TT V V = − − − + − − − + . ( 17 ) Appendix C demonstrates that the relationship θ V s ≤ θ L s holds at the system mode switc hing instant. Fig. 7 illustrates the specific case where θ V s = θ L s . From (20), the potential energies at points E , E' , F , and F' are equal to t he areas of regions ABE , A'B'E' , BDF' , and B'D'F , which are denoted a s S ABE , S A'B'E' , S BDF' , and S B'D'F , respectively. These areas are enclosed by boundary segments formed from sections of curves P {V,L} Ec2 , P {V,L} Mc2 , θ = θ {V,L} s , θ = θ 1 , and θ = θ 2 . Key points (e.g., A , B , E for region ABE ) serve to identify the specific enclosed region by marking the vertices or extents of these boundary segments. As illustrated in Fig. 7 , region B'D'F , which is enclosed by P V Ec2 , P V Mc2 , and θ = θ 2 , can be approximated by triangle B'D'F , such that S B'D'F ≈ S Δ B'D'F . Triangle BDG is constructed to be congruent to triangle B'D'F , thus S Δ BDG = S Δ B'D'F . Since t he P L Ec2 - θ curve e xhibits gr eater concavity than the P V Ec2 - θ curve at the mode switching po int θ = θ 2 , it is evident that S Δ BDG > S BDF' , with their difference denoted as Δ S L . Therefore, the potential energy at point F is less than that at point F' (i.e., ∆ V F p <0), indicating system energy decay during the switch from CVC to CLC. Similarly, it can be kn own that switching from CLC to CVC also results in energy decay. To further clarify, i f θ V s < θ L s , this area comparis on method readily shows that this energy reduction becomes even more pronounced. Thus, the GFLC angle-dependent switching process leads to energy decay within the switched system. In summary, the CLC subsystem exhibits significantly weaker stability compared to the CVC subsystem. The GFLC angle-dependent switching contributes to transient energy dissipation. As a result, the stability boundary of the switched system is determined by t he CLC subsystem. The critical energy can be calculated by s ubstituting θ L max into ( 13 ). I V. S TABILITY E NHANCEMENT C ONTROL This section designs a method for enhancing the stability of PLLs and stabilizing the GFMC to CVC rather than CLC, solely based on feedback from each converter’s own state varia bles. Park U c2 0 k 2p Σ c2 - g 2 d c2 u 2 q c2 u 2I s k 1 s Σ g ins 1 s (For Pa rk) R eset Fault dete ct ( ) ( ) 22 ref dref qref c2 c 2 c 2 I i i =+ cos -sin Σ Σ ref c2 I ref c2 I dref c2 i qref c2 i dref c 2* i qref c 2* i V s − (a) GFLC control structure with VFDC + − k 1p c1 - g ref c1 P c1 P ins Σ g ( For P a rk) 1 s e 1 s cos sin Σ Σ + − max c1 I max c1 I dref c1 i qref c1 i dref c1 * i qref c1 * i (b) GFMC control structure with VF DC Fig. 8. Control block diagram of VFDC. A. Virtual d-Axis Fixed Control Str ategy Under traditional grid-following control of GFLC or the CLC control of GFMC, the converter’s d -axis is typically aligned with θ or δ . This alignment keeps the d -axis component of the GFLC or GFMC current constant despite variations in θ or δ . Consequently, as θ increases, this constant current component can provide sustained “accelerating torque” , threatening PLLs’ transient stability. Moreover, this control approach carries the 8 > REPLACE THIS LINE WITH YO UR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < risk of the GFMC remai ning in CLC mode after fault cleara nce, as analyzed above. Furthe rmore, it may le ad to interactive current coupling between c onverters, thereby increasing the difficulty of control. To address this, we introduce the concept of “Virtual Fixed d- axis Control (VFDC)”. This strategy involves two key steps: first, eac h c onverter’s virtual d -axis is aligned with the actual current vector. Then, through each converter’s own state feedback, the current vector angle relative to the synchronous rotating axis is maintained c onstant. The sp ecific implementation is simple. For each grid- following converter, let: V 2s =− . ( 18 ) For centralized grid-connected droop-controlled GFMCs, let: 1 e =− . ( 19 ) where ε is a constant. The control block dia gram for this approach is presented in Fig. 8. As a result of implementing ( 18 ) and ( 19 ), the virtual d-axis angles (current vector angles) for the GFMC and GFLC, c1* and c2* , are now, respectively: V c1 * c2 * s , e == . ( 20 ) As depicted in Fig. 9 , with VFDC applied, the converter’s current angle no longer tracks θ or δ . Instead, it maintains a relatively constant angle with respect to the synchronous rotating axis (x-axis). Specifically, this constant angle is θ V s for GFLC and ε for GFMC. This achieves dynamic decoupling among multiple GFLCs, and al so between GFLCs and GFMC. The following discussion will elaborate on how this decoupling approach enhanc es system stability and facilitates adaptive stabilization to the correct e quilibrium point. x y d 2 q 2 d 1 q 1 g 1 c 2 c g Virtua l d 1 - axis o f GFMC Virtua l d 2 - axis o f GFLC 1 c1* c I 2 2* cc I V s e Fig. 9. System vectors after applying the propo sed VFDC B. Demonstration of Stabil ity Enhancement Subsequent analysis will show that for co-located GFLCs and droop- co ntrolled GFMCs systems, VFDC achieves superior transient stability over conventional current control of GFLCs and GFMCs. 1) Demonstration of enhanc ed PLL stability In engineering practice, renewable energy stations typically incorporate multiple GFLCs op erating in parallel, often with diverse control parameters and power outputs due to varying locations. In contrast, GFMCs used for support can be centrally fed in and uniformly controlled. Consequently, it is need to analyze scenarios with multiple GFLCs. Non-coherent GFLCs operation can induce additiona l negative damping via coupling [26], potentially compromising transient stability relative to coherent scenarios. Consequently, i f the syst em’s stability with VFDC proves superior to that of multi-GFLC coherent operation, the stability region achieved with VFDC will inevitably exceed that unde r non-coherent conditions. Let the subscript “ i ” denote the i -th GFLC (with n being the total number). D V c2 and D L c2 are updated to: ( ) ( ) ( ) ( ) ( ) 22 2 2 2 2 2p dd V c2 c1 g v c2 g c 2 2I 2p q d d d L c2 g g g c1 g c1 g c2i c2i g c 2 2I cos 1 s in 1 cos i i i i i ij i i i i ij i k D U U L i L i k k D U L i L i L L i L i k = − + − − − − = + − − + − ( 21 ) where i d 2 c2 ij is the current coupling term between the i -th GFLC and the other GFLCs, give n by ( ) 2 d c 2 c 2 c 2 1, cos n ij j i j j j i iI = =− ( 22 ) and L v i = L c2 i +(1- α ) L g . S ubstituting ( 21 ) into ( 14 ) yields the updated linear functions f v ( i ) and f L ( i ) as: ( ) ( ) ( ) ( ) ( ) ( ) ( ) 22 2 2 2 2 VV 2I V s g s 2p 2 I g c 2 2 I g 2 I g g g L d d q L L s c 2 c1 c1 s 2 2 p g 2 p g 2 p g dd v c 2 c g 2 c1 d c sin 1 sin i i ij i i i i i i i i ii ii i i i i j ii i k f U L L k k L L k L k L L f i i i U ii U k U k k U i = + − − + = + + + − − − + ( 23 ) Upon implementing VFDC , eq. ( 23 ) changes to: ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 22 V V V V 2I V* s c 2 s g c 2 s s 1, 2p 2I g c2 2I g 2I g g g dq L V V L* s c 2 s c2 s c1 c1 1, 2p g 2p g 2 1 p g g v c sin cos 1 cos sin cos cos n i i i i i j j i i i j j i i n ii ii i i i i j j i i i j j i i i i i i k f I L I k k L L k L k L L f I I i i k U k U U k U U L = = = − + − − − + = + − − − + − + + ( ) L s ii − ( 24 ) As per the analysis in Section III.B, a decr ease in the slope of linear functions signifies an expansion of the stabili ty boundary. After the fault is cleared, GFLCs revert to the no rmal control state. Thus, I c2 i cos( θ V s - θ )≤ I c2 i ≈ i d 2 c2 . Consequently, a comparison of ( 23 ) (without VFDC) and ( 24 ) (with VFDC) indicates that the slopes of the linear functions f v and f L without VFDC are greater than those of f v* and f L* with VFDC, as depicted in Fig. 10(a). This implies that VFDC expands the PLL stability boundary in both CVC and CLC subsystems. Furthermore, the slopes of f v* and f L* decrease with increasing θ , leading to a dynamic expa nsion of the stability boundary. 2) Demonstration of global s tability of GFMC in CVC Su stained operation in CLC is unacceptable for GFMCs. Therefore, it is imperative that the GFMC ultimately returns to CVC, demonstrating robust adaptability to various preceding disturbances . The VFDC addresses this challenge by inducing a unidirectiona l drift in the GFMC’s freque ncy and a ngle when in CLC mode. This drives the operating point out of the CLC region, allo wing the c onverter to switch back to CVC and stabilize. The demonstration is as foll ows: Upon applyi ng VFDC, the expression f or P CLC c1 (GFMC’s active power in CLC) is updated to P CLC c1 * : ( ) ( ) ( ) CLC c1 * A 2 2 max max 2 g c1 c 2 max V c1 c 2 A g c1 s gg V g g c 2 s V c 2 s sin 2 sin | | | | with | | sin arctan cos Pk U I I II k U I YY Y U I I e =+ = + − − = .( 25 ) In ( 25 ) , k A and β can be considered constants during the 9 > REPLACE THIS LINE WITH YO UR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < transient period. As a result, P CLC c1 * forms a straight line parallel to the δ -axis, as depicted in Fi g. 10(b). I f P CLC c1 * ≠ P CLC c1 , a persistent (and intentionally introduced) imbalance P CLC c1 * - P CLC c1 will always exist. According to (1), this imbalance will cause δ to continuously increase if P CLC c1 * > P CLC c1 (and vice-versa). This continuous shift of δ in one direction persists until it reaches the mode switching boundary δ = δ L k (or δ = δ R k ) . At this junct ure, GFMC transitions from CLC to CVC mode. Graphically, as shown in Fig. 10(b), the operating point jumps from the blue dashed line to the purple curve. Subsequently, it mov es along this curve until it conver ges to the SEP within t he CVC region. Notably, VFDC ’ s controlled guidance mechanism leads the GFMC to a viable CVC SEP, which may resi de in a subsequent or preceding cycle. This ultimately ensures the global stability of the switched system in CV C. To ensure safety, it is preferable for the active power to remain below its reference value. Thus, the subsequent step involves adjusting ε such that P CLC c1 * < P CLC c1 . Given network constraints, β is confined to the range [0, π/2]. As a result, P CLC c1 * exhibits a monotonic increase with ε over the range ε ∈ [- π/2,0]. Therefore, choosing ε= - π/2 ensures that P CLC c1 * is indeed less than P CLC c1 , and concurrently offers the most significant benefit to GFLCs’ transient stabilit y. St ab ilit y bound ary af ter cont rol (wi tho ut VFDC ) (wi th V FDC ) f v* or f L* f v or f L bef ore contr ol VL Ec 2 Ec 2 or PP VL Mc 2 Mc 2 or PP (a) Comparison of PLL stability with and without VFDC P c1 CLC CL C CV C SEP of C L C δ (wi tho ut VFDC ) (wi th VFDC ) CLC c1 P t rajectory w it hout VF D C t rajectory w i t h VFDC L k R k CVC c1 P Trans i t ion to CV C SEP of C V C CLC c1 * P ref c1 P (b ) Comparison of GFMC trajectories with and without VFDC Fig. 10. Illus tration of the effects of VFDC. Furthermore, for GFLCs, it is recommended that VFDC control be activated upon e ntering low -voltage ride-through (LVRT) control and sustained for seve ral seconds. For GFMCs, VFDC control should be enga ged if in CLC mode. In summary, the proposed VFDC control strategy improves the GFLC’s transient synchronization stability and drives the droop-controlled GFMC to adaptively return to the SEP of the CVC. V. V ERIFICATION A. Test System 1: Electromagnetic Transient Simulation A simplified equivalent model of the GFLC and droop- controlled GFMC co-located system is developed using the PSCAD simulation platf orm, as depicted in Fig. 1(a). The fault scenario involves a grid voltage sag occurring at t =1s, where the voltage drops to 0.3-0.5 p.u. and persists for t c seconds. TABLE III in Appendix C details the simulation parameters, and TABLE I specifies the tes t conditions for Cases 1 to 7. 1) Verification of the tr ansient stability analysis Cases 1-3 are designed to verify the impa ct on switched system stability arising from two scenarios: susta ined op eration within either the CVC or CLC subsystems (representing GFMC angle-dependent switching), and rapid, alternating CVC/CLC activation driven by PLL oscillations (representing GFLC angle-dependent switching). The test condit ions for Cases 1, 2, and 3 are largely consistent, with the primary distinction being the progressive increase in the GFMC's current limit ( I max c1 ). TABLE I C ONDITIONS AND P ARAMETERS FOR T EST S YSTEM 1 Case t c (s) P ref c1 , P ref c2 (MW) K q K 2p I max c 1 (p.u.) 𝜂 1 (rad) ρ 1 0.05 35,110 3 0.07 1 .1 0 0 .3 2 0.05 35,110 3 0.07 1.25 0 0 .3 3 0.05 35,110 3 0.07 1 .7 0 0 .3 4 0.1 35,70 3 0.15 1 .2 0 0 .3 5 0 .1 35,70 0 .5 0.15 1 .2 - π/2 0 .3 6 0.15 20,100 3 0.15 1 .1 0 0 .5 7 0.15 20,100 0 .5 0.15 1 .1 - π/2 0 .5 8 0 .2 40, 60 0 0.075 1 .3 0 0 .1 Notes : a) t c : fault duration; b) P ref c1 , P ref c2 : steady state power of GFMC and GFLC; c) LVRT reactive support coefficient of GFLC; d ) k 1p : p roportional coefficient o f PLL; e) I max c1 : GFMC current limit threshold; f) 𝜂 1 : satu ration current angle of GFMC; g) ρ : grid voltage drop coefficient during faults. time (s) (rad) Case 1 Case 2 Case 3 S S =1: CVC S =0: CL C (a) (b) Fig. 11. Simulation Results of Cases 1, 2, and 3. (a) PLL angle versus time curves; (b) CVC and CLC state indicato r. The corresponding results are presented in Fig. 11 and Fig. 12 . In Fig. 11 (b) and Fig. 12 (b), “ S ” serves as a mode switching indicator: S =1 denotes CVC subsystem activation, wh ile S =0 indicates CLC subsystem acti vation. As depi cted i n Fig. 11 (b), the simulation results for Cases 1, 2, and 3 illustrate three distinct post-fault clearance scenarios: CLC activation (Case 1), alternating CLC and CVC activation (Case 2), and CVC activation (Case 3). According to the transient energy cal culations i n Table II, the PLL's transient energy at the moment of fault clearance 10 > REPLACE THIS LINE WITH YO UR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < progressively increases from Case 1 to Case 3. This trend is attributed to the larger GFMC current amplitude within the fault period. As per (11), this large current increases P L Mc2 , consequently leading to more significant acceleration during the fault. Despite this energy increase, comparing the PLL angle oscillation amplitudes in Fig. 11(a) for Cases 1 and 3 clearly shows the CVC subsystem’s markedly superior stabili ty over the CLC subsystem. This indicates a significantly larger stability domain boundary for the CVC subsystem, which validates the theoretical anal ysis presented in Section III. A. time (s) δ , − / 2( ra d ) S δ 1a 1b 2a 2b 3a 4a 5a 6a 3b 4b 5b 6b s V - / 2 (a) (b) Indicator ( S =1, CVC; S =0, CLC) Fig. 12. Simulatio n Results of Case 2 . (a) APL and PLL an gle versus ti me curves; (b) CVC and CLC state indicato r. Similarly, comparing the simulation results of Case 1 and Case 2 demonstrates that fast switching (Case 2) is more conducive to PLL stability than continuous CLC subsystem activation (Case 1). Fig. 1 2 provides a detailed de piction of the dynamic mode switching process in Case 2. As shown, during each PLL os cillation cycle, the variation in the AP L’s angle remains relatively constant, allowing it to be regarded as a slow variable. In Fig. 12(a), k a (+ π/2 ) and k b (+ π/2 ) ( k =1,…,7) denote the PLL angles at the k -th CVC subsystem activation and deactivation, respectively. T he condition k a < V s < k b is observed, with the CVC subsystem activating at k a (the left switching point) and the CLC subsystem a ctivating at k b (the right switching point). The energy calculation results in Table II further reveal that eac h CLC → CVC → CLC fast-switching cycle dissipates the system’s transient energy. Therefore, the stability boundary of the switched system is ultimately determined by its stability within the CLC subsystem. These findings validate the theoretic al analysis in Section III.B. TABLE II R ESULTS OF T RANSIENT E NERG Y C ALCULATION Transient Energy Value Result At fault clearance Case 7: 0.65; Case 8: 0.72; Case 9: 1.33 V Case7 < V Case8 < V Case9 In CLC at 1a , 1b V ( 1a ): 0.61; V ( 1b ): 0.14 V ( 1b )< V ( 1a ) In CLC at 2a , 2b V ( 2a ): 0.77; V ( 2b ): 0.16 V ( 2b )< V ( 2a ) In CLC at 3a , 3b V ( 3a ): 0.94; V ( 3b ): 0.23 V ( 3b )< V ( 3a ) In CLC at 4a , 4b V ( 4a ): 0.35; V ( 4b ): 0.066 V ( 4b )< V ( 4a ) In CLC at 5a , 5b V ( 5a ): 0.053; V ( 5b ): 0.037 V ( 5b )< V ( 5a ) In CLC at 6a , 6b V ( 6a ): 0.022; V ( 6b ): 0.006 V ( 6b )< V ( 6a ) 2) Verification of the propo sed VFDC The proposed VFDC strategy is implement ed in Case s 4- 7 and Case 1 to assess its efficacy. As shown in Fig. 13, without VFDC, the system in Cases 4-7 ultimately stabilizes in the SEP of CLC subsystem. Conversely, with VFDC (Fig. 13(b), Fig. 14 (b)), the strategy transforms the P c1 - δ curve of the GFMC within the CLC subsystem from sine waves to a straight line with a c onstant P c1 output. This ca uses the APL angl e to continuously increase until it reaches the mode switching boundary, δ = δ R k , at which point the system transitions from CLC to CVC. This ensures global stability in CVC. Furthermore, Fig. 14 demonstrates VFDC’s effectiveness in enhancing PL L stability. It successfully stabilizes the previously unstable PLL in case 1. To demonstrate the superiority of the propo sed VFDC in stabilizing the GFLC, Fig. 15 (a) compares the PLL frequency response of VFDC against the frequency closed- loop feedback method [27] and the impedance matching method [28] under Case 8. As observed in Fig. 15(a), the method in [27] exhibits high sensitivity to control parameters, where improper PI setting leads to PLL stabilization failure. While the impedance matching method in [28] is effective, it entails complex online impedance estimation and parameter alignment. Conversely, the VFDC eliminates the need for complex tuning or real -time estimation by l ever aging local state feedback. Moreover, unlike “PLL freezing” techniques, the VFDC creates a virtually frozen d-axis as depicted in Fig. 9 instead of rigidly locking the loop, allowing the PLL to maintain continuous grid synchronization while ensuring transient stabil ity. δ (rad) P c1 (MW) Case 4 Case 5 Case 4,5 (with VFDC) CVC CLC CVC SEP in CVC SEP in CLC E E N 2 N 1 ref c1 P (a) Cases 4 and 5 Case 6 Case 7 C ase 6,7 (with VFDC) CLC C V C CLC CVC SEP in CVC SEP in CLC δ (rad) P c1 (MW) SEP i n CLC N 1 N 2 E E ref c1 P (b) Cases 6 and 7 Fig. 13. GFMC active power versus angle curves with and without VFDC in Cases 4- 7. Regarding the recovery of GFMC from CLC to CVC, Fig. 15 (b) presents a comparison between VFDC and the optimal saturation current angle method [18]. This simulation is conducted under Case 8, with the GFLC is disconnected to strictly isolate the GFMC performance . The strategy in [18] relies on pre-ca lculations based on s pecific network parameters to ensure SEPs under CLC mode fall within the CVC operation region. H owever, this dependency compromise s robust ness against system variations. As illustrated in Fig. 15(b), while both methods work effectively when the post-fault voltage 11 > REPLACE THIS LINE WITH YO UR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < recovers fully (1 p.u.), the method in [18] fails when the voltage recovers to only 0.95 p.u. In the latter scenario, the p re - calculated configuration becomes i nvalid, causing the GFMC to remain trapped in the CLC mode. In contrast, VFDC successfully restores GFMC to the correct SEP in both scenarios, demonstrating superior adaptability and robustness against operating condition uncertai nties. δ (rad) time (s) Case 7 Case 7 (with VF DC) SEP in CV C CLC CVC CVC P c1 (MW) (rad) E E (a) (b) ref c1 P Fig. 14. Co mparison of results with and without VFDC in Cas e 1. (a) PL L angle versus time curves; (b) GFMC active power versus an gle curves. Method in [ 27] (PI parameter: 0.5,100) Method in [27] (PI param eter: 0.01,10) Method in [ 28] VFDC time (s ) ϖ (rad/s) (a) PLL frequency of GFLC under different control strategies. Method in [18] ( U g recover to 0.95 p.u.) VFDC ( U g recover to 0.95 p.u.) VFDC ( U g recover to 1 p.u.) Method in [18] ( U g recover to 1 p.u.) SEP in CVC SEP in CLC SEP in CVC δ (rad) P c1 (MW) ref c1 P (b) CVC recovery performance of GF MC under different post -fault voltage conditions. Fig. 15. Co mparative simu lation resu lts of the proposed VFDC strategy and existing methods. B. Test System 2: Controller Hardw are in the Loop Test To further validate the proposed VFDC strategy, a controll er hardware- in -the-loop (C HIL) platf orm based on Real-Time Digital Simulator (RTDS) and dSPACE rapid control prototyping system is constructed (Fig. 16). On this platform, the system circuit from Fig. 1(a) is simulated using RTDS, while GFMCs and GFLCs control algorithms are implemented on dSPACE. Host Compu t er Dspac e RTD S Circ u it Mod e l Real- time Data Real- time Data Vo l tage and Cur rent Samp ling PW M sign al Fig. 16. Configuration of the CHIL platform. Two test cases are examined. In Case 9 , GFLCs adopt a single-machine aggregate d model, but they are grouped into three clusters with distinct con trol parameters in Case 10 . Relevant system and control parameters are provided in TABLE IV (Appendix D). The fault scenario in volves a grid voltage dip to 0.01 p.u. for 2 00ms. Fault begin Fault clear GFMC stabilizes at CLC 1 2 3 4 time (s) c2 (rad/s) P c1 (p.u.) I c1 (p.u.) 314 316 318 1 0 -1 1.4 1.0 1.2 0.8 (a) Without VFDC c2 (rad/s) P c1 (p.u.) I c1 (p.u.) CLC Back to CVC (GFMC VFDC activatio n) Fault clear Fault beg in (GFLC VFDC activation) CVC 0.5 1 1.5 2 2.5 3 3.5 time (s) 314.0 314.5 315.0 2 1 0 -1 1.5 1.0 (b) With VFDC Fig. 17. Experiment results of Case 9. Fig. 17 and Fig. 18 present the CHIL test results for Case 9 and Case 10, respectively. As evident from Fig. 17(a), without the proposed VFDC, the GFLC’s PLL became unstable, and the GFMC ultimat ely stabilized in CLC mode. In contrast , with VFDC applied, the GFLC’s VFDC is activated after fault clearance, enabling it to quickly achieve phase synchronization. 12 > REPLACE THIS LINE WITH YO UR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < During the CLC period, the GFMC’s VFDC activates to maintain its active power constant, thereby automatically restoring it to CVC mode. Similarly, for Case 10, Fig. 18 (a) shows that GFLC clusters 1 a nd 2 lose synchronization whe n VFDC is not applied. However, with VFDC implem ented (Fig. 18(b)), not only do all three GFLC clusters successfully synchronize, but the GFMC also ultimately returned to CVC mode. These results validate the effectiveness of the proposed VFDC strategy in multi- machine systems. VI. D ISCUSSION A. Impact of GFMC Virtual Impe dance on GFLC stability In grid-following renewable energy systems integrated with GFMCs, the GFMC’s prim ary role is to establish a sta ble voltage reference for robust ph ase locking by GFLCs[6]. To achieve this and prevent un desirable dynamic coupling, its voltage and current control loops are de signed to operate significantly faster than synchronization loops (P LL and AP L) [22]. Consequently, at the synchronization dynamic timescale, the introductio n of a virtual impedance Z virtual into the GFMC control loop effectively mean s the GFMC behaves as a voltage source U c1 ∠ δ in series with Z virtual . This can be seen as reducing the GFMC’s equivalent gri d -connection admittance Y c1 . Generally, a large virtual impedance is utilized in strong grids to limit short -circuit currents and e nhance small -signal stability. In weak-grid conditions, as focused on this paper, GFMCs are expected to provide grid strength support, typically requiring a small Z virtual . If a large Z virtual is applied in a weak- grid context, making the electrical distance from the GFMC to the PCC non-negligible compared to that from the PCC to the receiving end, its impact on PLL sta bility is com plex. The reduction in Y c1 can expand the CVC operating region. However, this comes with a cost. The increased Z virtual raises L v = L c1 +(1- α ) L g equivalently and thus increases θ V s . As a result, both the slope and intercept of f v increase according to ( 16 ) , signifying degraded PLL stability. In fact, PLL stability in the CVC subsystem might even fall below that of the CLC subsystem. Moreover, if the increased virtual impedance causes θ V s to exceed θ L s , the GFMC ’ s mode switc hing behavior could become detrimental. What would normally reduce PLL transient energy might instea d increase it. Therefore, a moderate virtual impedance can ex pand t he CVC operating region, thereby reducing the likelihood of transitioning t o CLC mode. However, an excessively l arge virtual impedance might worsen the sending-end GFLC's synchronous stabili ty in the CVC s ubsystem. From the perspective of supporting GFLC transient stability, the optimal virtual impedance magnitude warrants further in-depth research. B. Applicability of Concl usions to VSG-Type GFMC 1) Theoretical validity of PL L stability analysis Although the VSG ( or droop controller with LPF) introduces second-order angle dynamics due to virtual inertia, this distinction is negligible within the timescale of PLL dynamics. Under CVC operation, both typ es function as voltage sources. Their CLC behavior is also comparable if adopted same cu rrent limiting strategies. Furthermore, in well-designed parallel systems, robust PLL tracking needs APL or VSG to operate slower than the PLL[13],[22]. This decoupling ensures the GFMC’s angle appears approximately “frozen” when analyzing PLL stability. Consequently, the conclusion regarding the switching system remains valid reg ardless of whether APL or VSG control is adopted. 2) Applicability of the propo sed VFDC strategy The VFDC strategy eliminates unintended SEPs in the GFMC’s CLC mode, forcing the system trajectory towards the CVC switching boundary to achieve recovery. This directional guidance is sufficient for first-order systems to reach the desired SEP. However, for sec ond -order systems like VSG, merely guiding the trajectory t o the CVC region is insu fficient if dynamic oscill ations persist. VSG synchronization stabi lity demands not only a correct recovery path but also adequate energy dissipation. Therefore, for VSG-GFMC applications, VFDC must be combined with existing stability enhancement measures, such as VSG damping enhancement control[3], to ensure both inherent VSG stabili ty an d c onvergence to the desired equilibrium point. 0.5 Fault begin Fault clear GFLC cluster 1 and 2 ins tability 1 1.5 2 2.5 3 time (s ) c2 (rad/s) P c1 (p.u.) I c1 (p.u.) 314 316 318 1.5 1.0 0.5 0 1.4 1.2 1.0 0.8 0.6 (a) Without VFDC (GFMC VFDC activation) Fault begin Fault clear (GFLC VFDC activation) Back to CV C CLC CVC 1 2 4 6 time (s ) 0 3 5 P c1 (p.u.) I c1 (p.u.) 314.0 314.5 315.0 1 0 -1 1.4 1.2 1.0 0.8 0.6 c2 (rad/s) 313.5 (b) With VFDC Fig. 18. Experiment results of Case 10. VII. C ONCLUSION Upon integration of GFMCs, their current saturation characteristics transform the GFLC-dominated power system into a state-dependent switching system. The re are two distinct switching modes exist: “GFMC angle - dependent switching” at the APL dynamic timesca le and “GFLC angle -dependent switching” at the PLL dynamic timescale. Under these 13 > REPLACE THIS LINE WITH YO UR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < dynamics, the system faces two primary stability challenges: the failure of GFMCs to recover to CVC mode post -fault, and the PLL transient instability constraine d by the CLC boundary. To address these issues, this paper proposes a novel control concept: virtual fixed d- axis control (VFDC). Relying solel y on local state feedback, VFDC adaptively facilitates PLL convergence and ensures the correct restorati on of the GFMC to CVC mode. Comparative analysis confirms that the proposed strategy achieves robust and adaptive stabilization with a simple structure compared to existing methods. A PPENDIX A. Expressions for Variables i n (6) g V Ec2 c1 sin( ) ( 1 ) sin P UU +− = − , ( 26 ) V d* Mc2 g v c2 P L i = , ( 27 ) V d* c2 2p v c2 2I 1 ( 1 ) / T k L i k = − − , ( 28 ) V d* c2 2p 2I c1 g v c2 / cos( ) ( 1 ) c os D k k U U L i = − + − − , ( 29 ) L Ec2 g sin PU = , ( 30 ) L d* q* Mc2 g g c1 g g c2 c2 () P L i L L i = + + , ( 31 ) L q* d* c2 2p 2I g g g c1 g c2 c2 / cos ( ) D k k U L i L L i = + − + , ( 32 ) L q* d* c2 2p 2I g g g c1 g c2 c2 / cos ( ) D k k U L i L L i = + − + , ( 33 ) B . Proof of θ 1 < θ V s < θ 2 From ( 11 ) , it is clear that the PLL’s SEP in CVC always exists, reg ardless of the value of δ . Fig. 19(a) illustrate s the vector relationships at the mode switching instant within the CVC subsystem. As shown, for a closed loop to be formed by the vectors, θ V s must necessa rily fall within the range 1 < θ V s < 2 . Otherwise, eq. (9) would be unsolva ble. C . Proof: θ V s ≤θ L s at Mode Switching Moments U g 0° β 1 I c1 max ( c1 +90° ) γ I c2 ( 2 +90° ) γ I c2 ( +) U c1 δ p γ I c2 ( s V +90° ) δ p O x C L1 C L2 2 + + Γ L1 Γ L2 C V s V + (a) The relation between mode switc hing points and the SEP of PLL δ p max O x Γ L1 Γ L2 C V (b) Vector relationships when δ p reaches its maximum value δ p max s U c1 U g 1 2 3 4 (c) Relationships between δ p max and σ Fig. 19. Vector relationships in the CVC subsystem at mode sw itching instant. For a conservative analysis, i d 2 c1 can be approximated by its maximum value, I max c1 , which represents the most critical operating condition for PLL stability. In ( 11 ) and ( 12 ), given that L c1 is negligible compared to L g , θ V s - θ L s is expressed as: 2 d ma x VL 1 c1 c2 s s p p g ar csin Ii U s + − − = − . ( 34 ) From Fig. 19(b), δ p reaches its maximum, δ max p , if β 1 I max c1 ∠ ( c1 +90° ) is collinear with γ I c2 ∠ ( c2 +90 ° ). Let σ be the angle in the second term on the right side of ( 34 ). The geometric relationship between σ and δ max p is shown in Fig. 19(c). It can be proven that δ max p ≤ σ (Using pr oof by c ontradiction: if σ < δ max p , then ∠ 3= ∠ 1= ∠ 2+ δ max p > 90 ° , which contradicts the fact that ∠ 3< ∠ 4= 90 ° . Thus, δ max p ≤ σ ). Therefore, as per ( 34 ) , θ V s ≤ θ L s . D . Parameters of the Test Systems TABLE III P ARAMETERS OF T EST S YSTEM 1 I tem Parameter Name Parameter Value GFLC PI parameters of outer power loop 0.005,20 PI coefficient of the PLL 0.07 or 0.15,100 PI parameters of inner current loop 70,125 Filter inductor, resistor 0.065,0.001 p.u. GFMC Droop coefficient of A PL 0.04 PI parameters of inner voltage loop 0.015,0.2 PI parameters of inner current loop 60,120 Filter inductor, capacitor, resistor 0.15,50.59,0.005 p.u. Branch 1/ Y c1 , 1/ Y c2 , 1/ Y g 0.05, 0.03, 0.58 p.u. Grid Voltage level 220 kV Base frequency and capacity 50 Hz, 200 MVA TABLE IV P ARAMETERS OF T EST S YSTEM 2 Item Case Parameter Name Parameter Value GFLC 8 PI coefficient of the PLL 0.25, 100 PI parameters of current loop 80, 500 Filter inductor 7e -3 H Output power (7 units) 60.2 MW 9 PI coefficient of the PLL Cluster 1: 0.25, 100; Cluster 2: 0.15, 50; Cluster 3: 0.6, 100. PI parameters of current loop 150, 100 Filter inductor, resistor 7e -3 H Output power Cluster 1: 27.9 MW; Cluster 2: 16.8 MW; Cluster 3: 8.4 MW. Droop- controlled GFMC Droop coefficient of A PL 0.02 PI parameters of voltage loop 1, 1.5 PI parameters of current loop 150, 150 Filter inductor, resistor 5e -3 H, 7e-5 Ω Rated capacity (2 units) 12 MVA Current saturation angle 0 rad Branch 1/ Y c1 , 1/ Y c2 , 1/ Y g 0.26, 0.05, 0.4 p.u. Grid Voltage level 220 kV Base frequency and capacity 50 Hz, 200 MVA 14 > REPLACE THIS LINE WITH YO UR MANUSCRIPT ID NUMBER (DOUBLE-CLICK HERE TO EDIT) < R EFERENCES [1] M. G. Taul, X . Wang, P. Davari, and F. Blaabjerg, “An Overview of Assessment Methods for Synchronization Stability of Grid -Connected Converters Under Severe Sym metrical Grid Faults,” IEEE Trans. Power Electron. , vol. 34, no. 10, pp. 9655 – 9670, Oct. 2019. [2] S. Yang et al ., " Multi-Swing Transient Stab ility of Synchronous Generators and IB R Combined Generation Systems," IEEE Tra ns. Power Syst. , vol. 40, no. 1, pp. 1144 -1147, Jan. 2025. [3] X. W ang, M. G. Taul, H. Wu, Y. Li ao, F. Blaabjerg, a nd L. Harnefors, “ Grid-Synchronization Stab ility of Co nverter-Based Resources — An Overview,” IEEE Open J. Ind. Appl ., vol. 1, pp. 115 – 1 34, 2020. [4] C. Canestrini, “Bl ackout hits Spain and Portugal: what happened and what’s next,” Florence Scho ol of Regulation. Accessed : Jun. 10 , 2025. [Online]. Available: https://fsr.eui.eu/blackout-hits -spain-and-portugal- what-happened-and-whats-nex t/ [5] K. St runz, K. Almunem, C. Wulkow, M. Kuschk e, M. Valescudero, and X. Guillaud, “Enabling 100% Renewable Power Systems Through Power Electronic Gr id -Forming Converter and Control: System Integration for Security, Stability, and Application to Europe,” Proc. IEEE , vol. 111, no. 7, pp. 891 – 915, Jul. 2023. [6] H. Xin, C. Liu, X. Chen, Y. Wang, E. Prieto- Araujo, an d L. Huang, “How Many Grid-Forming Converters Do We Need? A Perspective From S mall Signal Stability and Power Grid Strength,” IEEE Trans. Power Syst. , vol. 40, no. 1, pp. 623 – 635, Jan. 20 25. [7] L. M. C. Chandorkar, D. M. Divan and R. Adapa, "Co ntrol of parallel connected inverters in stan dalone AC supply systems," in IEEE Trans. Ind. Appl. , vol. 29, no. 1, pp. 136 -143, Jan.-Feb. 1993. [8] J. Fang, W. Si, L. Xing, and S. M. Goetz, “Analysis and Improvem ent of Transient Voltage Stability for Grid - Forming Conv erters,” IEEE Trans. Ind. Electron. , vol. 71, no. 7, pp. 7230 – 7240, Jul. 2024. [9] Y. Zhan g, C. Zhang, R. Yang, M. Molinas, and X. Cai, “Cu r rent- Constrained Power-Angle Charact erization Method for Transient Stability Analysis of Grid- Forming Voltage So urce Con verters,” I EEE Trans. Energy Convers , vol. 38 , no. 2, pp. 1338 – 1349, Jun. 202 3. [10] B. Fan and X. Wang, “Fault Reco very An alysis of Grid -Forming Inverters With Priority- Based Current Limite rs,” IEEE Trans. Pow er Syst. , vol. 38, no. 6, pp. 5102-5112, Nov. 20 23. [11] Huang, H. Xin, Z. Wang, L. Zhan g, K. Wu, and J. Hu, “T ransient stability analysis and control design of droop-controlled voltage source converters considering current li mitation,” IEEE Trans. Smart Grid , vol. 10, no. 1, pp. 578 – 591, Jan. 2019. [12] C. Shen, Z. Shuai, Y. Pend, X. Liu, Z. Li, and J. Shen, “Transient Stability and Current Injection Design of Paralleled Current-Co ntrolled VSCs and Virtual Synchronous Generators,” IEEE Trans. Smart Grid ., vol. 12 , no. 2, pp. 1118 – 1134, Mar. 2021. [13] P. M e, M. H. Ravanji , M. Z. Mansour, S. Zabihi, a nd B. Bah rani, “Transient Stability of Paralleled Virtual Synchronous Generator and Grid- Following Inverter,” IEEE Trans. Smart Grid ., vol. 14, no. 6, pp. 4451 – 4466, Nov. 2023. [14] C. Xu, Z. Zou, J. Yan g, Z. Wang, W . Chen, and G. B uticchi, “Transient Stability Analysis and Enhancement of Grid-Forming and Grid-Followin g Converters,” IEEE J. Emerg. Sel. Topics Ind. Electron ., v ol. 5, no. 4, pp. 1396 – 1408, Oct. 2024. [15] S. Chen, J. Yao, Y. Liu, J. Pei, S. Huang, and Z. Chen, “Coupling Mechanism Analysis and Transien t Stab ility Assessment for Multiparalleled Wind Farms Durin g LVRT,” IEEE Trans. Sustain. Energy , vol. 12, no. 4, pp. 2132 – 2145, Oct. 2021. [16] X. Yi et al., “ Transient Synchronization Stability Analysis and Enhancement of Paralleled Con verters Considering Different Current Injection Strategie s,” IEEE Tran s. Susta in. Energ y , vol. 13, no. 4, pp. 1957 – 1968, Oct. 2022. [17] K. Zhuang, H. Xin, P. Hu, and Z. Wang, “Current Saturation Analysis and Anti-Windup C ontrol Design of Grid-Forming Volta ge Source Converter,” IEEE Trans. Energy Convers. , vol. 37, no. 4, pp. 2790 – 2802 , Dec. 2022. [18] Y. Li, Y. Lu, X. Yuan, R. Yang, S. Yang, H. Ye, and Z. Du, “ Transient Stability of Power Sy nchronization Loop Based Grid Forming Converter,” IEEE Trans. Energy Convers . , vol. 38, no. 4, pp. 2843 – 2859 , Dec. 2023. [19] A. Mohd, E. Ortjohann , D. Morton, and O. Omari, “Review of control techniques for inverters parallel operation,” Electr. Power Syst. Res. , vol. 80, no. 12, pp. 1477 – 1 487, Dec. 2010. [20] J. Liu et al., "Multiobjective adaptive predictive virtual synch ronous generator control strategy for grid stability and renewable integration," Sci. Rep., vol. 15, article 93721, 2025. [21] J. Shang, J. Yu, Z. Liu, S. Wang, J. Li, and J, Liu, “Accurate Frequency - domain Modeling an d Simplified Stability Criterion for Parallel Grid- forming and Grid- following Inv erter System,” Autom. Electr. Power Syst. , pp. 1 – 23, Dec. 2024. [22] Q. Qu, X. Xiang, K. Xin , Y. Liu, W. Li , and X. He, “ Transient Stability Analysis o f Hybrid GFL-GFM Syst em Consid ering Various Damping Effects,” IEEE Trans. Ind. Electron. , pp. 1 – 14, 2025. [23] C. Wu, Y. Lyu, Y. Wang, and F. Blaabjerg, “ Transient Synchronization Stability Analysis of Grid-Following Co nverter Co nsidering the Cou pling Effect of Cu rrent Loop and Phase Locked Lo op,” IEEE Trans. Energ y Convers , vol. 39, no. 1, pp. 544 – 554, Mar. 2024. [24] B. Li et al., "Entire Period Transient Stability of Synchronous Generators Considering LVRT Switching of Nearby Renewable Energy Sources," IEEE Trans. Power Syst. , doi: 10.11 09/TPWRS.2025.3614478. [25] Y. Li , Y. Lu, an d Z. Du, “Direct method o f Lyapunov applied to synchronization stability o f VSC with ph ase- locked loop,” Electr. Power Syst. Res. , vol. 220, p. 109376, Jul. 2023. [26] Z. Wang, L. Guo, X. Li, X. Zhou, J. Zhu, and C. Wang, “Multi -swing PLL Synchronization Transient Stab ility of Grid -Connected Paralleled Converters,” IEEE Trans. Susta in. Energy , pp. 1 – 13, 2024. [27] Ö . Göksu , R. T eodorescu, C. L. Bak, F. Iov, and P. C. Kjær, “Instability of Wind Turbine Co nverters During Cu rrent Injection to Low Voltage Grid Faults and PLL Frequency Bas ed Stability Solution,” IEEE Trans. Power Syst. , vol. 29, no. 4, pp. 1683 – 1691. [28] S. M a, H. Geng, L. Liu, G. Yang, and B. C. Pal, “Grid -Synchronization Stability Improvement o f Large Scale Wind Farm During Severe Grid Fault,” IEEE Trans. Power Syst. , vol. 33 , no. 1, pp. 216 – 226, Jan. 20 18. Bingfang Li (S'23-M'26 ), received the B.S. degree from North China Electric Power University, Baoding, China , in 2022, and is currently working toward the Ph.D. degree with Xi’an Jiaotong University. Her main fields of interest include Power system stabili ty analysis and control. Songhao Yang (S'18-M'19-SM'24) was born in Sh andong, China, in 1989. He received the B.S. and Ph.D. degrees in electrical engineering from Xi’an Jiaotong University, Xi’an, China, in 2012 and 2019, respectively, and the Ph.D. degree in electrical and electronic engineering from Tokushima University, Tokushima, Japan, in 2019. He is currently an Associate Professor with Xi’an Jiaotong University. His research focuse s on power system stability ana lysis and control. Pu Cheng (S '2 3 ) , received the B.S. degree from Xi’an Jiaotong University, Xi’an , China, in 2024, and is currently working toward the Ph.D. degree with Xi’an Jiaotong University. H is main fields of interest include Power system voltage stability anal ysis. Zhiguo Hao (M'10-SM'23), was born in Ordos, China, in 1976. He received the B.Sc. and Ph.D. degrees i n el ectrical engineering from Xi’an Jiaotong University, Xi’an, China, in 1998 and 2007, resp ectively. He is currently a Professor with t he Ele ctrical Engineering Department, Xi’an Jiaotong University. His research focuses on power system protection and contr ol.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment