Directional Geometry and Anisotropy in the Partition Graph
We develop a directional formalism for the partition graph G_n based on several canonical reference sets: the main chain, the self-conjugate axis, the spine, and the boundary framework. For each such set S, the graph distance d_S induces a shell stru…
Authors: Fedor B. Lyudogovskiy
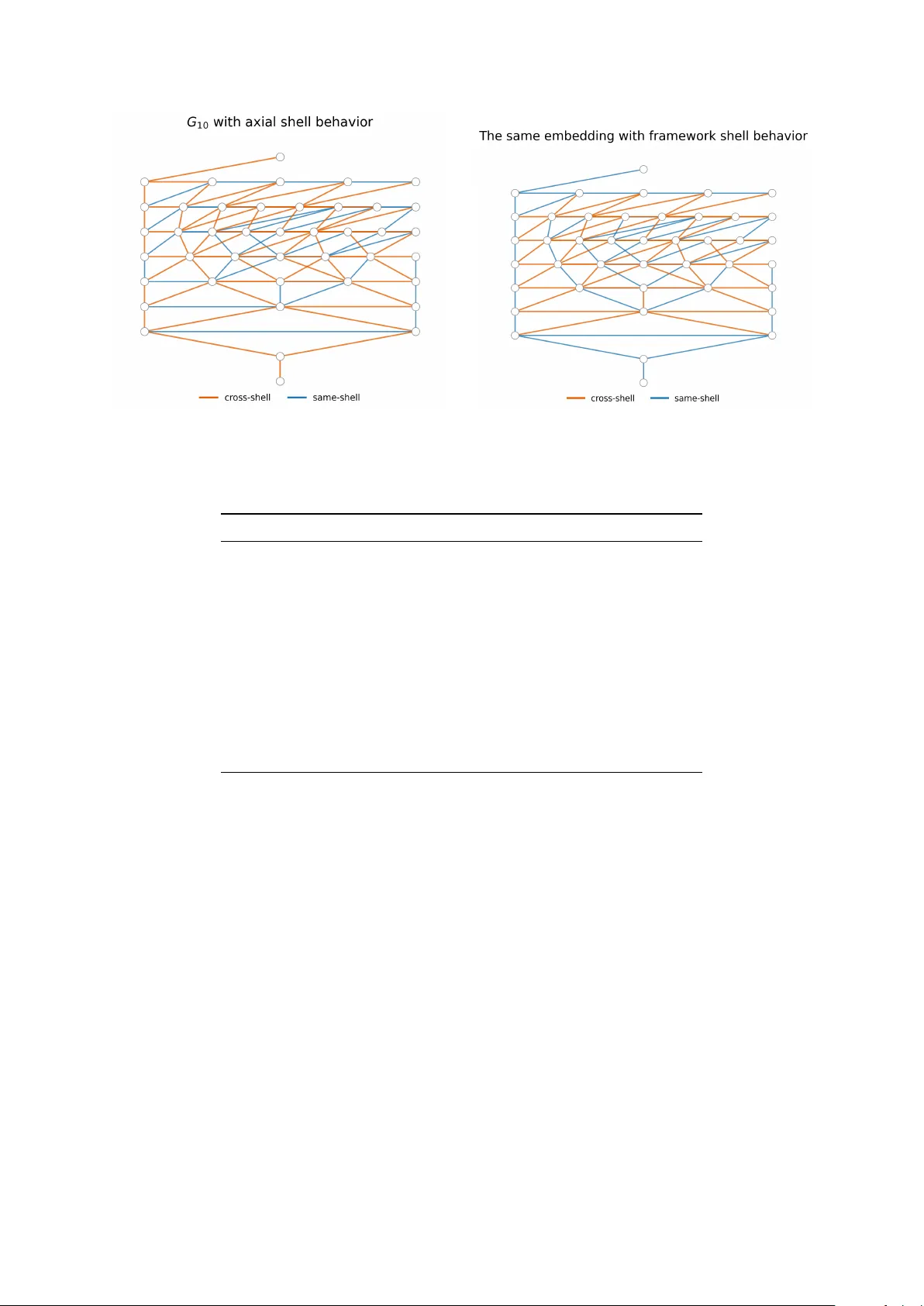
Directional Geometry and Anisotrop y in the P artition Graph F edor B. Lyudogo vskiy Abstract W e dev elop a directional formalism for the partition graph G n based on several canonical reference sets: the main c hain, the self-conjugate axis, the spine, and the b oundary framew ork. F or each such set S , the graph distance d S induces a shell structure and a lo cal trichotom y of edges in to inw ard, out ward, and level classes. P assing from edges to paths, we define directional corridors as monotone inw ard geo desics to ward a chosen reference set and prov e that ev ery vertex admits at least one. W e then pro ve a structural non-equiv alence theorem: for connected G n , t wo nonempty reference sets induce the same edgewise directional field if and only if the difference of their distance functions is constant; in particular, distinct reference sets induce distinct directional fields. This provides a first precise formalization of anisotropy in G n . W e also sho w that ev ery b ounded neigh b orhoo d of a reference set is accessible by a monotone inw ard corridor, whic h gives a directional in terpretation to previously established controlled regions around the axis, the spine, and the framework. Finally , we complement the strict theory with a computational atlas illustrating edgewise directional statistics, directional mixing, lo cal inv ariant drift, and corridor-based transp ort profiles. Keyw ords: partition graph; integer partitions; directional geometry; anisotrop y; graph distance; monotone geo desics; self-conjugate axis; spine; b oundary framework; controlled neighborho o ds MSC 2020: 05C12, 05C75, 05A17 1 In tro duction The partition graph G n is the graph whose vertices are the integer partitions of n and whose edges corresp ond to elementary unit transfers b et ween parts, follow ed by reordering in to nonincreasing form; see Section 2 for a precise definition. In the preceding pap ers of this series, sev eral geometric structures hav e b een iden tified in G n : the main c hain, the self-conjugate axis, central neigh b orho ods, simplex lay ers, the degree landscap e, the spine, the b oundary framework, and rear morphology [ 5 , 6 , 7 , 8 ]. A p ersisten t informal theme b ehind these constructions is that G n is not isotropic. Certain directions or transp ort regimes app ear to b e privileged, while others pla y visibly different roles. The aim of this pap er is to formalize that intuition. W e do not seek a global geometric classification, nor do we attempt to reduce all motion in G n to a single dominant field. Instead, w e develop a strict directional language relativ e to several canonical reference sets already present in the morphology of G n : the main chain M n , the self-conjugate axis Ax n , the spine Sp n , and the boundary framework F r n . F or eac h suc h set S , the graph distance d S pro duces a shell decomp osition of G n and a lo cal trichotom y of edges into inw ard, outw ard, and level classes. P assing from edges to paths, we define directional corridors as monotone in ward geo desics tow ard a c hosen reference set. A t the formal level, the pap er has three main structural comp onen ts. First, relative to any nonempt y reference set S ⊆ V ( G n ) , the distance function d S induces a lo cal trichotom y of edges and a corresp onding shell decomp osition of G n . Second, every vertex admits an S -monotone in ward geo desic to S , which pro vides a pathwise notion of directional corridor. Third, if G n is connected, t wo nonempty reference sets induce the same edgewise directional field if and 1 only if the difference of their distance functions is constan t; in particular, distinct reference sets induce distinct directional fields. T ogether with the controlled-access principle for b ounded neigh b orho ods, these results yield a first strict framework for directional geometry and anisotropy in the partition graph. The contribution of the pap er is therefore conceptual and organizational rather than enu- merativ e. The relev an t background comes from the global homotopy-theoretic study of Cl ( G n ) and from the companion pap ers on lo cal morphology , large-scale morphology , axial morphology , simplex stratification, and the degree landscap e [ 3 , 4 , 5 , 6 , 7 , 8 ]. The present pap er do es not re-establish those results; rather, it studies the directional relations among these structures. In particular, once a distinguished region is known to lie in a b ounded neigh b orho od of the axis, the spine, or the framework [ 6 , 5 ], the corridor formalism immediately con verts that containmen t statemen t into a directional-access statemen t. This is the main bridge b et ween the present work and the earlier morphology pap ers. W e also include a compact computational atlas for the tested range 8 ≤ n ≤ 12 . The strict theory developed in Sections 2–5 already implies that different reference sets define different directional fields, but it do es not by itself quantify the resulting anisotropy . The computations therefore serv e t wo auxiliary purp oses: they mak e the shell geometry visually explicit, and they measure how different directional regimes interact with lo cal in v ariants such as degree, lo cal simplex dimension, supp ort size, and height. The pap er is organized as follows. Section 2 fixes the canonical reference sets and the basic distance observ ables. Section 3 in tro duces edgewise directional classes and the shell-based tric hotomy . Section 4 passes from edges to paths and establishes the existence of monotone in ward geo desics, which we call directional corridors. Section 5 contains the main structural anisotrop y result and the con trolled-access principle for b ounded neigh b orho ods. Section 6 presen ts a computational directional atlas for the tested range 8 ≤ n ≤ 12 . The final section summarizes the resulting picture and form ulates several op en problems. 2 Canonical reference sets and directional observ ables W e now recall the ob jects that will serve as reference sets in the present pap er. Let V ( G n ) denote the set of partitions of n written in nonincreasing form. F or standard background on in teger partitions and F errers diagrams, s ee Andrews and Stanley [ 1 , 2 ]. Definition 2.1. Let λ = ( λ 1 , . . . , λ k ) ⊢ n . Cho ose tw o distinct indices i, j with 1 ≤ i, j ≤ k and λ j > 0 . Replace λ i b y λ i + 1 and λ j b y λ j − 1 , delete the latter if it b ecomes 0 , and reorder the resulting parts into nonincreasing form. If the resulting partition is µ = λ , w e say that µ is obtained from λ b y an elementary unit tr ansfer . T wo partitions λ, µ ⊢ n are adjacent in G n if one is obtained from the other by a single elemen tary unit transfer. This is the same adjacency conv ention used throughout the earlier pap ers of the series; in particular, it is the conv ention underlying the lo cal transfer language and the heigh t function [ 3 , 4 ]. 2.1 Canonical reference sets The main chain is the ho ok chain M n = { ( n − k , 1 k ) : 0 ≤ k ≤ n − 1 } , joining the t wo antennas ( n ) and (1 n ) . The self-c onjugate axis is Ax n = { λ ⊢ n : λ = λ ′ } . 2 F or the b oundary fr amework , we use, following the large-scale morphology pap er [ 5 ], F r n = M n ∪ L n ∪ R n , where L n = { ( n − k , k ) : 1 ≤ k ≤ ⌊ n/ 2 ⌋} is the left edge and R n = L ′ n is its conjugate righ t edge. The spine Sp n is taken in the thin sense defined in the axial-morphology pap er [ 6 ]. W rite the self-conjugate partitions of n in decreasing lexicographic order as σ 1 , σ 2 , . . . , σ m . F or each consecutiv e pair ( σ i , σ i +1 ) , choose a shortest path in G n connecting them that is lexicographically minimal among all such shortest paths. The spine Sp n is the union of Ax n with all v ertices lying on these c hosen paths. This c hoice is not claimed to b e the only reasonable one, but it is sufficiently canonical for the present directional theory and for the computations in Section 6. 2.2 Distance observ ables, shells, and neigh b orho o ds Let S ⊆ V ( G n ) b e nonempty . W e write d S ( λ ) = min σ ∈ S d G n ( λ, σ ) for the graph distance from λ to S . F or the four canonical reference sets we use the shorthand notation d M , d Ax , d Sp , d F r . Definition 2.2. Let S ⊆ V ( G n ) b e nonempty and let r ≥ 0 . The r -th shell around S is Sh ( r ) S = { λ ∈ V ( G n ) : d S ( λ ) = r } , and the closed r -neigh b orhoo d of S is N ( ≤ r ) S = { λ ∈ V ( G n ) : d S ( λ ) ≤ r } . W e also use the height function h ( λ ) = X i ≥ 1 iλ i and the supp ort size s ( λ ) = ℓ ( λ ) , that is, the n umber of p ositiv e parts of λ . These observ ables already play an imp ortan t role in the lo cal and degree-theoretic morphology of G n [ 4 , 8 ], and they will reapp ear in Section 6 as part of the directional drift profile. R emark 2.3 . The present pap er uses r elative directional language. There is no absolute notion of in ward motion. Instead, w e sp eak ab out motion tow ard M n , Ax n , Sp n , or F r n , dep ending on whic h distance observ able is b eing used. 3 2.3 Connectivit y The directional-equiv alence theorem in Section 5 relies on the fact that G n is connected. Prop osition 2.4. F or every n ≥ 1 , the p artition gr aph G n is c onne cte d. Pr o of. Let λ = ( λ 1 , . . . , λ k ) ⊢ n , with λ 1 ≥ · · · ≥ λ k > 0 . If k = 1 , then λ = ( n ) . Assume k ≥ 2 . Choose the smallest part λ k , and mov e its units one by one to the largest part λ 1 . Eac h such step is an elemen tary unit transfer b etw een tw o parts, follow ed b y reordering, and therefore corresp onds to an edge of G n . After λ k transfers, the smallest part disapp ears, so the n umber of parts decreases by 1 . Rep eating the pro cedure, w e even tually reach the one-part partition ( n ) . Thus every vertex is connected to ( n ) , and G n is connected. 3 Directional classes of mo v es W e now formalize direction at the level of individual edges of G n . 3.1 Edgewise direction relative to a reference set Prop osition 3.1. L et S ⊆ V ( G n ) b e nonempty, and let λ ∼ µ in G n . Then | d S ( λ ) − d S ( µ ) | ≤ 1 . Equivalently, exactly one of the fol lowing thr e e c ases holds: d S ( µ ) = d S ( λ ) − 1 , d S ( µ ) = d S ( λ ) , d S ( µ ) = d S ( λ ) + 1 . Pr o of. Cho ose σ ∈ S such that d S ( λ ) = d ( λ, σ ) . Since λ ∼ µ , d ( µ, σ ) ≤ d ( λ, σ ) + 1 = d S ( λ ) + 1 , hence d S ( µ ) ≤ d S ( λ ) + 1 . By symmetry , d S ( λ ) ≤ d S ( µ ) + 1 . Therefore | d S ( λ ) − d S ( µ ) | ≤ 1 . Definition 3.2. Let S ⊆ V ( G n ) b e nonempty , and let λ ∼ µ . (i) The edge λµ is S -inwar d at λ if d S ( µ ) = d S ( λ ) − 1 . (ii) It is S -outwar d at λ if d S ( µ ) = d S ( λ ) + 1 . (iii) It is S -level at λ if d S ( µ ) = d S ( λ ) . Corollary 3.3. L et Sh ( r ) S = { λ ∈ V ( G n ) : d S ( λ ) = r } . Then every e dge of G n either lies inside a single shel l Sh ( r ) S or joins two adjac ent shel ls Sh ( r ) S and Sh ( r +1) S . Pr o of. Immediate from Prop osition 3.1 . 4 3.2 T angen tial and transv erse motion Definition 3.4. Let S ⊆ V ( G n ) b e nonempty . (i) An edge λµ is internal to S if λ, µ ∈ S . (ii) It is tr ansverse to the S -shel l structur e if d S ( λ ) = d S ( µ ) . (iii) It is tangential to the S -shel l structur e if d S ( λ ) = d S ( µ ) . Prop osition 3.5. L et S ⊆ V ( G n ) b e nonempty. (i) Every e dge internal to S is S -level. (ii) Every S -inwar d or S -outwar d e dge is tr ansverse to the S -shel l structur e. (iii) Every S -level e dge is tangential to the S -shel l structur e. Pr o of. F or (i), if λ, µ ∈ S , then d S ( λ ) = d S ( µ ) = 0 , so the edge is S -lev el. Statements (ii) and (iii) are immediate from the definitions. R emark 3.6 . T angen tial motion and internal motion should not b e conflated. An edge can b e tangen tial to the S -shell structure without b eing in ternal to S . F or instance, this o ccurs when b oth endp oin ts lie in the same p ositiv e shell Sh ( r ) S with r > 0 . 3.3 Named directional classes and com bined signatures W e shall sp eak of axial , spinal , chain , and fr amework inw ard/out ward/lev el motion according to whether S equals Ax n , Sp n , M n , or F r n . It is con venien t to record sev eral directional fields simultaneously . Definition 3.7. F or an orien ted edge ( λ, µ ) , define the combined directional signature Σ( λ, µ ) = σ M ( λ, µ ) , σ Ax ( λ, µ ) , σ Sp ( λ, µ ) , σ F r ( λ, µ ) , where σ S ( λ, µ ) = d S ( µ ) − d S ( λ ) ∈ {− 1 , 0 , +1 } . Definition 3.8. An oriented edge is dir e ctional ly c oher ent if all nonzero components of its com bined directional signature hav e the same sign. Otherwise it is called dir e ctional ly mixe d . R emark 3.9 . The same edge ma y b e inw ard relative to one reference set, lev el relative to another, and out ward relative to a third. This already sho ws that the directional geometry of G n is not go verned by a single field. 4 Monotone paths and directional corridors The edgewise language of Section 3 giv es rise to a natural path geometry relative to any chosen reference set S . 5 4.1 Monotone paths Definition 4.1. A path P = ( λ 0 , λ 1 , . . . , λ m ) in G n is called (i) S -monotone inwar d if d S ( λ i +1 ) = d S ( λ i ) − 1 (0 ≤ i < m ); (ii) S -monotone outwar d if d S ( λ i +1 ) = d S ( λ i ) + 1 (0 ≤ i < m ); (iii) S -level if d S ( λ i +1 ) = d S ( λ i ) (0 ≤ i < m ) . Lemma 4.2. L et P = ( λ 0 , λ 1 , . . . , λ m ) b e an S -monotone inwar d p ath. Then d S ( λ i ) = d S ( λ 0 ) − i (0 ≤ i ≤ m ) . In p articular, m ≤ d S ( λ 0 ) . If mor e over λ m ∈ S , then m = d S ( λ 0 ) , and the p ath is a ge o desic fr om λ 0 to S . Pr o of. The identit y follo ws b y induction on i . Since distances are nonnegative, d S ( λ 0 ) − i ≥ 0 , so i ≤ d S ( λ 0 ) for all i , and in particular m ≤ d S ( λ 0 ) . If λ m ∈ S , then d S ( λ m ) = 0 , so 0 = d S ( λ 0 ) − m , hence m = d S ( λ 0 ) . No path from λ 0 to S can hav e length smaller than d S ( λ 0 ) . Lemma 4.3. L et λ ∈ V ( G n ) with d S ( λ ) > 0 . Then λ has a neighb or µ such that d S ( µ ) = d S ( λ ) − 1 . Pr o of. Cho ose σ ∈ S such that d ( λ, σ ) = d S ( λ ) , and let λ = λ 0 , λ 1 , . . . , λ r = σ b e a shortest path from λ to σ , where r = d S ( λ ) . Then λ 1 is adjacen t to λ , and d S ( λ 1 ) ≤ d ( λ 1 , σ ) = r − 1 = d S ( λ ) − 1 . By Prop osition 3.1 , d S ( λ 1 ) ≥ d S ( λ ) − 1 . Hence d S ( λ 1 ) = d S ( λ ) − 1 . Prop osition 4.4. F or every vertex λ ∈ V ( G n ) , ther e exists an S -monotone inwar d p ath fr om λ to S of length d S ( λ ) . Equivalently, every vertex admits an S -monotone inwar d ge o desic to S . 6 Pr o of. If d S ( λ ) = 0 , there is nothing to prov e. Otherwise Lemma 4.3 gives a neighbor λ 1 with d S ( λ 1 ) = d S ( λ ) − 1 . Rep eating the argument inductively yields a path λ = λ 0 , λ 1 , . . . , λ r suc h that d S ( λ i ) = d S ( λ ) − i (0 ≤ i ≤ r ) . The pro cess stops when d S ( λ r ) = 0 , that is, when λ r ∈ S . Then r = d S ( λ ) , and Lemma 4.2 sho ws that the path is geo desic. Corollary 4.5. L et P = ( λ 0 , λ 1 , . . . , λ r ) b e any p ath fr om λ 0 to a vertex of S of length r = d S ( λ 0 ) . Then P is S -monotone inwar d. Pr o of. Since P has length d S ( λ 0 ) and ends in S , it is a geo desic from λ 0 to S . F or each i w e ha ve d S ( λ i ) ≤ r − i, b ecause the tail λ i , λ i +1 , . . . , λ r connects λ i to S in r − i steps. On the other hand, the initial segment λ 0 , λ 1 , . . . , λ i has length i , so d S ( λ 0 ) ≤ i + d S ( λ i ) . Since r = d S ( λ 0 ) , it follo ws that r ≤ i + d S ( λ i ) , and hence d S ( λ i ) = r − i (0 ≤ i ≤ r ) . Therefore d S ( λ i +1 ) = d S ( λ i ) − 1 (0 ≤ i < r ) , so P is S -monotone inw ard. 4.2 Directional corridors and pathwise transp ort Definition 4.6. An S -dir e ctional c orridor is an S -monotone inw ard geo desic. In particular, w e sp eak of axial, spinal, chain, and framew ork corridors when S = Ax n , Sp n , M n , and F r n , resp ectiv ely . R emark 4.7 . No uniqueness is claimed. A given vertex ma y admit many different directional corridors to the same reference set. Definition 4.8. Let P = ( λ 0 , . . . , λ m ) b e a path in G n . (i) P is internal to S if λ i ∈ S for all i ; (ii) P is shel l-tangential with r esp e ct to S if it is S -level; (iii) P is shel l-tr ansverse with r esp e ct to S if every edge of P is S -in ward or S -out ward. Prop osition 4.9. L et P b e a p ath in G n . (i) If P is internal to S , then P is S -level. 7 (ii) Every S -dir e ctional c orridor is shel l-tr ansverse with r esp e ct to S . Pr o of. If ev ery vertex of P b elongs to S , then every vertex has d S = 0 , so every edge is S -lev el. If P is an S -directional corridor, then every edge is S -inw ard by definition. R emark 4.10 . An S -lev el path need not b e in ternal to S . This happ ens whenever some p ositiv e shell Sh ( r ) S , r > 0 , con tains a nontrivial path. 5 Anisotrop y and in teraction with established morphology The results of this section isolate a basic strict form of anisotrop y in G n . 5.1 Heigh t orien tation Lemma 5.1. If λ ∼ µ in G n , then h ( λ ) = h ( µ ) . In p articular, every e dge of G n admits a unique height dir e ction. Pr o of. By definition of the partition graph, adjacen t vertices differ by a single elementary unit transfer b et ween tw o parts, follo wed by reordering into nonincreasing form. Let µ b e obtained from λ b y transferring one unit from the j -th part to the i -th part b efore reordering, where i = j . F or any partition ξ = ( ξ 1 , ξ 2 , . . . ) , write T r ( ξ ) := X t ≥ r ξ t . Then h ( ξ ) = X r ≥ 1 T r ( ξ ) , since X r ≥ 1 T r ( ξ ) = X r ≥ 1 X t ≥ r ξ t = X t ≥ 1 tξ t . Assume first that i < j . Before reordering, the mo dified sequence has the same total sum as λ , and its partial sums are larger than those of λ for k = i, . . . , j − 1 and unc hanged otherwise. After reordering into nonincreasing form, the sums of the first k terms can only increase. Hence k X t =1 µ t ≥ k X t =1 λ t ( k ≥ 1) , with strict inequalit y for some k . Since | λ | = | µ | , this is equiv alent to T r ( µ ) ≤ T r ( λ ) ( r ≥ 1) , with strict inequalit y for some r . Therefore h ( µ ) = X r ≥ 1 T r ( µ ) < X r ≥ 1 T r ( λ ) = h ( λ ) . The case i > j is symmetric, and yields h ( µ ) > h ( λ ) . In either case, h ( λ ) = h ( µ ) . Th us adjacent vertices alwa ys hav e distinct heights. 8 Prop osition 5.2. Orient e ach e dge of G n fr om the endp oint of smal ler height to the endp oint of lar ger height. Then the r esulting orientation is acyclic. Pr o of. By Lemma 5.1 , this orientation is well defined on every edge. Along every oriented edge the heigh t strictly increases. Therefore a directed cycle would force h ( λ 0 ) < h ( λ 1 ) < · · · < h ( λ k ) = h ( λ 0 ) , whic h is imp ossible. R emark 5.3 . The heigh t orientation is in trinsic: it do es not dep end on a chosen reference set. It should therefore b e compared with the shell-based directional fields rather than identified with an y one of them. 5.2 Directional equiv alence and its failure Definition 5.4. Let S, T ⊆ V ( G n ) b e nonempty . W e say that S and T are dir e ctional ly e quivalent if σ S ( λ, µ ) = σ T ( λ, µ ) for ev ery oriented edge ( λ, µ ) of G n . Theorem 5.5. A ssume that G n is c onne cte d. L et S, T ⊆ V ( G n ) b e nonempty. Then the fol lowing ar e e quivalent: (i) S and T ar e dir e ctional ly e quivalent; (ii) the function d S − d T is c onstant on V ( G n ) . Pr o of. If d S − d T is constan t, then for every oriented edge ( λ, µ ) , d S ( µ ) − d S ( λ ) = d T ( µ ) − d T ( λ ) , so S and T are directionally equiv alent. Con versely , assume that σ S ( λ, µ ) = σ T ( λ, µ ) for every oriented edge. Fix a base vertex λ 0 ∈ V ( G n ) and let λ ∈ V ( G n ) b e arbitrary . Since G n is connected by Prop osition 2.4 , there exists a path λ 0 , λ 1 , . . . , λ m = λ. Summing the edge incremen ts along this path yields d S ( λ ) − d S ( λ 0 ) = m − 1 X i =0 σ S ( λ i , λ i +1 ) = m − 1 X i =0 σ T ( λ i , λ i +1 ) = d T ( λ ) − d T ( λ 0 ) . Hence d S ( λ ) − d T ( λ ) = d S ( λ 0 ) − d T ( λ 0 ) , whic h is indep enden t of λ . Corollary 5.6. L et S, T ⊆ V ( G n ) b e nonempty and distinct. Then S and T ar e not dir e ctional ly e quivalent. Equivalently, ther e exists an oriente d e dge ( λ, µ ) such that σ S ( λ, µ ) = σ T ( λ, µ ) . 9 Pr o of. Supp ose that S and T are directionally equiv alent. By Theorem 5.5 , the function d S − d T is constan t on V ( G n ) ; write this constan t as c . Cho ose s ∈ S and t ∈ T . Since d S ( s ) = 0 and d T ( t ) = 0 , w e hav e c = d S ( s ) − d T ( s ) = − d T ( s ) ≤ 0 and c = d S ( t ) − d T ( t ) = d S ( t ) ≥ 0 . Hence c = 0 , so d S = d T on all of V ( G n ) . No w let s ∈ S . Then d S ( s ) = 0 , hence d T ( s ) = 0 , which means that s ∈ T . Th us S ⊆ T . By symmetry , T ⊆ S . Therefore S = T , contradicting the assumption that the tw o sets are distinct. R emark 5.7 . Applying Corollary 5.6 to M n , Ax n , Sp n , F r n , w e conclude that the four canonical directional fields are pairwise distinct. This is the basic strict form of anisotrop y in G n . 5.3 A ccess to b ounded neighborho o ds The corridor formalism extends from reference sets to their b ounded neighborho o ds. Prop osition 5.8. L et S ⊆ V ( G n ) b e nonempty, and let r ≥ 0 . F or every vertex λ ∈ V ( G n ) , ther e exists a p ath fr om λ to the close d neighb orho o d N ( ≤ r ) S = { µ ∈ V ( G n ) : d S ( µ ) ≤ r } which is S -monotone inwar d and has length max { d S ( λ ) − r , 0 } . In p articular, if d S ( λ ) ≥ r , then ther e exists an S -monotone inwar d ge o desic fr om λ to N ( ≤ r ) S of length d S ( λ ) − r . Pr o of. If d S ( λ ) ≤ r , the trivial path suffices. Otherwise choose an S -directional corridor λ = λ 0 , λ 1 , . . . , λ m from λ to S , where m = d S ( λ ) b y Prop osition 4.4 . By Lemma 4.2 , d S ( λ i ) = d S ( λ ) − i. Setting i ∗ = d S ( λ ) − r , w e obtain d S ( λ i ∗ ) = r , so λ i ∗ ∈ N ( ≤ r ) S . The initial segmen t of the corridor has length d S ( λ ) − r and is optimal, since eac h edge changes d S b y at most 1 . Definition 5.9. A set X ⊆ V ( G n ) is S -c ontr ol le d with r adius r if X ⊆ N ( ≤ r ) S . 10 (a) Coloring by d Ax ; blac k rings mark v ertices where d Ax = d Sp . (b) Coloring b y d Sp ; black rings mark v ertices where d Ax = d Sp . Figure 1: T wo shell structures on the same embedding of G 10 , sho wn with identical vertex p ositions to isolate the difference b et ween axial and spinal shells. The t wo shell structures are close but not iden tical; vertices where the tw o shell distances differ are mark ed by black rings. Prop osition 5.10. L et X ⊆ V ( G n ) b e S -c ontr ol le d with r adius r . Then every vertex λ ∈ V ( G n ) admits an S -monotone inwar d ge o desic to the c ontr ol le d r e gion N ( ≤ r ) S . If d S ( λ ) ≥ r , the length of such a ge o desic is d S ( λ ) − r . Pr o of. Immediate from Prop osition 5.8 . R emark 5.11 . Prop osition 5.10 is inten tionally formulated in abstract form. Its role is to conv ert previously established con tainment statements into directional ones. Whenever a distinguished family of vertices is already kno wn to lie in a b ounded neigh b orho od of Ax n , Sp n , or F r n , the prop osition immediately yields corresp onding axial, spinal, or framework corridors to that region. 6 Computational directional atlas W e no w complement the strict theory with a small computational atlas. All computations in this section were carried out for the tested range 8 ≤ n ≤ 12 . The figures use fixed lay outs for G 10 and G 12 , while the tables summarize either selected v alues of n or the whole tested range. F or each n , we en umerated all partitions of n , constructed the graph G n using Definition 2.1 , and computed the reference sets M n , Ax n , Sp n , and F r n . W e then computed the distance fields d M , d Ax , d Sp , and d F r . Lo cal degrees are graph degrees. The lo cal simplex dimension of a v ertex w as computed as the maximal clique size con taining that v ertex min us one. Canonical directional corridors w ere obtained by choosing, at each step, the lexicographically smallest neigh b or that decreases the relev ant distance by one. 6.1 Edgewise directional statistics Figures 1a and 1b sho w the vertex shell geometry of G 10 relativ e to the axis and the spine, using the same embedding in b oth panels. The t wo shell structures are very close for G 10 , so the v ertices at which d Ax and d Sp differ are marked by black rings. Figures 2a and 2b display the corresp onding same-shell versus cross-shell edge b eha vior. Observation 6.1 . In the tested range, the shell geometry around the canonical reference sets is visibly non-uniform. In particular, the level/transv erse split dep ends substantially on the reference set. F or example, the framework exhibits a larger lev el share than the main chain, the 11 (a) Relativ e to Ax 10 . (b) Relativ e to F r 10 . Figure 2: Same-shell and cross-shell edge b eha vior for tw o differen t reference sets. In each panel, blue edges remain inside a shell and orange edges cross b et w een adjacent shells. n reference set lev el share transverse share max shell radius 8 M n 36.2% 63.8% 3 8 Ax n 36.2% 63.8% 4 8 Sp n 34.0% 66.0% 4 8 F r n 48.9% 51.1% 2 10 M n 35.1% 64.9% 4 10 Ax n 40.4% 59.6% 5 10 Sp n 40.4% 59.6% 5 10 F r n 45.6% 54.4% 3 12 M n 34.4% 65.6% 6 12 Ax n 42.3% 57.7% 6 12 Sp n 40.3% 59.7% 6 12 F r n 41.5% 58.5% 4 T able 1: Edgewise directional statistics for the canonical reference sets. axis, or the spine at n = 8 and n = 10 , while the axial and spinal shell geometries are visually distinguishable in the figures, with the lo cal discrepancies marked explicitly in Figure 1a – 1b . 6.2 Com bined signatures and directional mixing Observation 6.2 . Directionally mixed edges form a substan tial part of G n throughout the tested range. The mixed-edge share remains b et ween 37 . 2% and 43 . 5% for 8 ≤ n ≤ 12 , and the num b er of distinct com bined signatures increases from 24 at n = 8 to 34 at n = 12 . R emark 6.3 . Observ ation 6.2 is the most direct empirical reflection of Corollary 5.6 . The theorem sa ys that different reference sets cannot induce the same field globally; the computations sho w that their disagreemen t is not confined to a small exceptional subset of edges. 6.3 Directional drift of lo cal in v arian ts F or every orien ted edge ( λ, µ ) we computed ∆ deg = deg ( µ ) − deg( λ ) , ∆ dim loc = dim loc ( µ ) − dim loc ( λ ) , 12 n distinct com bined signatures mixed-edge share coherent-edge share 8 24 42.6% 57.4% 9 32 41.1% 58.9% 10 32 41.2% 58.8% 11 33 43.5% 56.5% 12 34 37.2% 62.8% T able 2: Combined directional signatures in the tested range. directional class mean ∆ deg median ∆ deg share ∆ deg > 0 mean ∆ dim loc share ∆ dim loc > 0 mean ∆ h axial inw ard 1.81 2 65.5% 0.34 38.6% -0.98 spinal inw ard 2.10 2 71.6% 0.33 35.7% -0.60 framework in ward -1.23 -1 27.0% -0.42 3.2% 0.93 axial level 0.00 0 35.0% 0.00 8.7% 0.00 spinal level 0.00 0 34.6% 0.00 12.3% 0.00 framework lev el 0.00 0 29.6% 0.00 7.3% 0.00 T able 3: Empirical drift of lo cal inv ariants along selected directional classes, aggregated ov er 8 ≤ n ≤ 12 . together with ∆ h . T able 3 aggregates these quantities o ver all orien ted edges of the tested range 8 ≤ n ≤ 12 . Observation 6.4 . The empirical drift of lo cal inv ariants dep ends strongly on the directional regime. In the tested range, axial inw ard and spinal in ward motion ha ve p ositiv e av erage drift in b oth degree and lo cal simplex dimension, while framew ork inw ard motion has negative av erage drift in b oth quantities. Numerically , the mean degree drift is 1 . 81 for axial in ward edges, 2 . 10 for spinal in ward edges, and − 1 . 23 for framework inw ard edges. R emark 6.5 . The level classes hav e zero mean drift by symmetry , but their p ositiv e-increment shares remain informative. In particular, the p ositiv e degree share is ab out 35% for axial and spinal lev el motion, compared with 29 . 6% for framework level motion on the tested range. 6.4 Corridor profiles W e next pass from individual edges to canonical corridors. Figure 3 shows three corridor types from the same starting v ertex in G 12 . T able 4 summarizes median hit times for several targets. The columns “to Ax n ” and “to Sp n ” measure the median num b er of corridor steps needed to hit the corresp onding reference set. F or the complexit y-based targets, hit times are computed only ov er successful starts, while the accompan ying success column records the prop ortion of starts whose canonical corridor reac hes the target at all. The column “to top degree” records the median first-hit time for the maxim um-degree zone, together with its success rate along the chosen corridor family . The final t wo columns do the same for the top lo cal-simplex-dimension zone. Observation 6.6 . Canonical corridors tow ard different reference sets are visibly non-coincident, b oth geometrically and combinatorially . In particular, framew ork corridors remain strongly b oundary-confined: in T able 4 their success rate for the top-degree zone is b elo w 5% at eac h of n = 8 , 10 , 12 , while axial corridors reach that zone with success rates b et ween 51 . 9% and 63 . 6% . Observation 6.7 . In the tested range, corridors directed tow ard axial and spinal neighborho o ds pro vide more direct access to structured interior regions than framework corridors. This is visible b oth in Figure 3 and in the corridor statistics: axial and spinal corridors alwa ys reach the corresp onding central neighborho o ds b y construction, whereas framew ork corridors reach top-complexit y zones only rarely . 13 Figure 3: Canonical axial, spinal, and framework corridors from the same starting vertex in G 12 , defined b y the lexicographically minimal descent rule. n corridor t yp e to Ax n to Sp n to top degree success to top simplex success 8 axial 2 1.5 2 63.6% 1 95.5% 8 spinal 1.5 1 1.5 36.4% 1 95.5% 8 framew ork 0 0 0 4.5% 0 36.4% 10 axial 2 2 1 57.1% 0 100.0% 10 spinal 1 2 1 31.0% 0 100.0% 10 framew ork 0.5 0 0 2.4% 0 57.1% 12 axial 2 2 2 51.9% 1 63.6% 12 spinal 2 2 2 22.1% 1 53.2% 12 framew ork 1 1 0.5 2.6% 0 14.3% T able 4: Corridor access statistics for selected geometric and complexity targets. 6.5 Summary of empirical anisotropy The computations support the following qualitativ e picture. First, the canonical directional fields are visibly non-coincident, b oth edgewise and path wise. Second, lo cal complexit y drift dep ends on the directional regime: axial and spinal inw ard motion tend to mo ve to ward higher-complexit y regions, while framework in ward motion tends to mov e aw a y from them. Third, access to structured interior regions is directionally unev en: corridor families relative to the axis, the spine, and the framew ork do not play interc hangeable roles. These observ ations do not replace the strict theory of Sections 2–5. Rather, they sho w how that theory manifests itself concretely in finite partition graphs and pro vide an initial measured atlas of anisotrop y in G n . 14 7 Conclusion and op en problems W e developed a directional formalism for the partition graph G n based on graph distance from canonical reference sets. This formalism yields in ward, outw ard, and level edge classes, shell decomp ositions, and monotone inw ard geo desics, whic h we interpret as directional corridors. The central structural result is the non-equiv alence theorem: distinct nonempty reference sets induce distinct directional fields. T ogether with the in trinsic acyclic height orien tation, this gives a first precise formal meaning to the statemen t that the partition graph is anisotropic. A second, conceptual contribution of the pap er is the controlled-access principle. It shows that any region known to lie in a b ounded neighborho od of the axis, the spine, or the framework automatically inherits corresp onding directional corridors. In this w ay , earlier morphological results can b e read in directional terms without b eing reprov ed here. The computational atlas complements the strict theory . It do es not prov e univ ersal optimality statemen ts, but it shows that the directional language introduced in this pap er captures visible and measurable structure already in the tested range of v alues of n . W e conclude with several op en problems. Problem 7.1 (Quantitativ e anisotropy) . Dev elop numerical in v arian ts measuring the extent of anisotropy in G n . Natural candidates include the mixed-edge share, div ergences b et ween directional drift profiles, and distances betw een corridor families asso ciated with differen t reference sets. Problem 7.2 (Directional access to complexity) . Determine whether high-complexity regions of G n , suc h as high-degree zones or top simplex la yers, are asymp totically more accessible through certain directional regimes than through others. Problem 7.3 (Compatibility of directional fields) . Study the existence of paths that are sim ultaneously w ell b eha v ed with resp ect to several reference sets. F or example, when can a path b e spinal-inw ard while also nonincreasing in axial distance? Problem 7.4 (Rear-directed geometry) . Clarify whether rear-directed transp ort defines a gen uinely new directional field or whether it can be reduced to the existing axis/spine/framework language. Problem 7.5 (Directional morphology across n ) . Extend the present fixed- n theory to the comparativ e-growth picture across n . How do directional fields b eha v e under natural ov er- la ys G n → G n + k ? Which directional patterns stabilize, and which remain lo cal to small or in termediate v alues of n ? Problem 7.6 (T ow ard a discrete transp ort theory) . Dev elop a broader framework in whic h directional corridors, shell crossings, and controlled neighborho o ds are treated as parts of a discrete transp ort geometry on G n . A c kno wledgemen ts The author ac knowledges the use of ChatGPT (Op enAI) for discussion, structural planning, and editorial assistance during the preparation of this manuscript. All mathematical statements, pro ofs, computations, and final w ording were chec ked and approv ed b y the author, who takes full resp onsibilit y for the con tents of the pap er. References [1] G. E. Andrews, The The ory of Partitions , Encyclop edia of Mathematics and its Applications, V ol. 2, Addison–W esley , Reading, MA, 1976. 15 [2] R. P . Stanley , Enumer ative Combinatorics. V ol. 1 , second ed., Cambridge Universit y Press, Cam bridge, 2011. [3] F. B. Lyudogovskiy , The homotopy typ e of the clique c omplex of the p artition gr aph , arXiv:2603.14370 [math.CO], 2026. A v ailable at . [4] F. B. Lyudogovskiy , L o c al Morpholo gy of the Partition Gr aph , arXiv:2603.18696 [math.CO], 2026. A v ailable at . [5] F. B. Lyudogovskiy , The Partition Gr aph as a Gr owing Discr ete Ge ometric Obje ct , arXiv:2603.21221 [math.CO], 2026. A v ailable at . [6] F. B. Lyudogo vskiy , Axial Morpholo gy of the Partition Gr aph: Self-Conjugate Axis, Spine, and Conc entr ation , arXiv:2603.22546 [math.CO], 2026. A v ailable at . [7] F. B. Lyudogovskiy , Simplex Str atific ation and Phase Boundaries in the Partition Gr aph , arXiv:2603.23228 [math.CO], 2026. A v ailable at . [8] F. B. Lyudogo vskiy , The De gr e e L andsc ap e of the Partition Gr aph: Maximal De- gr e e, Extr emal V ertic es, and Sp e ctr a , arXiv:2603.24141 [math.CO], 2026. A v ailable at arXiv:2603.24141 . 16
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment