Integrated Multi-Drone Task Allocation, Sequencing, and Optimal Trajectory Generation in Obstacle-Rich 3D Environments
Coordinating teams of aerial robots in cluttered three-dimensional (3D) environments requires a principled integration of discrete mission planning-deciding which robot serves which goals and in what order -- with continuous-time trajectory synthesis…
Authors: Yunes Alqudsi, Murat Makaraci
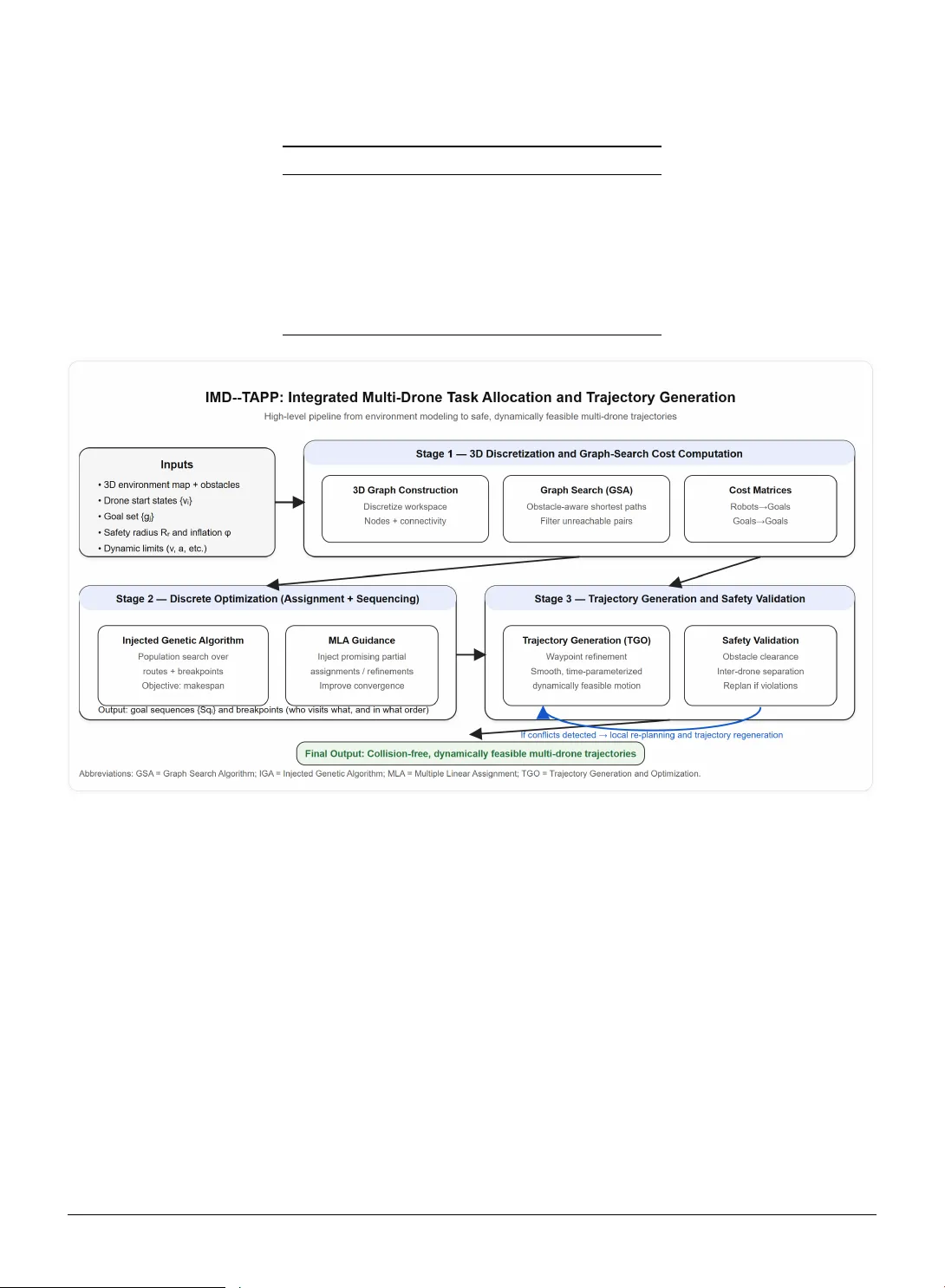
Integrated Multi-Drone T ask Allocation, Sequencing, and Optimal T rajectory Generation in Obstacle-Ric h 3D En vironments Y unes ALQUDSI a,b , ∗ , Murat MAKARA CI c a Aer ospace Engineering Department, F aculty of Aer onautics and Astr onautics, Kocaeli U niversity , Kocaeli, T urkiye b Inter disciplinar y Resear ch Cent er for A viation and Space Explor ation, KFUPM, Dhahran, Saudi Arabia c Mechanical Engineering Department, F aculty of Aeronautics and Astronautics, Kocaeli Univ ersity, Kocaeli, T urkiye A R T I C L E I N F O Keyw ords : Multi-U A V mission planning multi-robot task allocation multi-goal routing obstacle-aw are graph search collision av oidance trajectory optimization A B S T R A C T Coordinating teams of aer ial robots in cluttered t hree-dimensional (3D) environments requires a principled integration of discre te mission planning—deciding which r obot serves which goals and in what order—with continuous -time trajectory synthesis that enforces collision a voidance and dynamic feasibility . This paper introduces IMD–T APP (Integrated Multi-Drone T ask Allocation and Path Planning), an end-to-end framew ork that jointly addresses multi- goal allocation, tour sequencing, and safe trajectory generation for quadrotor teams operating in obstacle-rich spaces. IMD–T APP first discretizes t he workspace into a 3D navigation graph and computes obstacle-aw are robot-to-goal and goal-to-goal tra vel costs via graph-search-based pathfinding. These costs are then embedded wit hin an Injected Particle Sw arm Optimization (IPSO) sc heme, guided b y multiple linear assignment, to efficiently e xplore coupled assign- ment/ordering alternatives and to minimize mission makespan. Finall y , the resulting w aypoint tours are transformed into time-parameterized minimum-snap trajectories through a generation- and-optimization routine equipped wit h iterative validation of obstacle clearance and inter- robot separation, trigger ing re-planning when safe ty margins are violated. Extensive MATLAB simulations across cluttered 3D scenarios demonstrate that IMD–TAPP consistentl y produces dynamically f easible, collision-free trajector ies while achie ving competitive completion times. In a representative case study wit h two drones serving multiple goals, the proposed approach attains a minimum mission time of 136 s while maint aining the required safety constraints t hroughout ex ecution. 1. Introduction Unmanned aer ial vehicles (U A Vs), including multirotor platf or ms, hav e ev olv ed from laboratory prototypes into widely deploy ed autonomous sys tems f or inspection, mapping, monitor ing, and logistics. This pr og ress has been enabled b y advances in onboard sensing, computation, and control, together with the operational flexibility of vertical take-off and landing vehicles [ 1 , 2 ]. Consequently , mission planning for UA Vs is commonly studied through routing and path-planning f or mulations, and surve ys summar ize the breadth of algor ithms proposed for U A V routing and for autonomous aerial operations in real environments [ 3 , 4 ]. Many practical deplo yments remain challenging for a single vehicle because of limited endurance, sensing range, and pay load capacity . Coordinated multi-drone teams mitigate these limitations by distributing goals across robots, impro ving mission completion time, co verag e, and robustness [ 5 ]. A t the same time, cooperation introduces tightly coupled challenges such as shared-airspace saf ety , congestion around obst acles, and the need for scalable coordination as the team size grow s [ 6 ]. Benchmar king and ev aluation suites for sw arm robotics highlight t he importance of standardized, reproducible testing when comparing multi-robot coordination approaches [ 7 , 8 ], and state-of-the-ar t revie ws emphasize t he remaining gaps betw een laboratory demonstrations and reliable, scalable field operation [ 9 ]. A persistent difficulty in multi-drone operation is guaranteeing saf ety while preserving efficiency . Collision a voidance must be enforced both with respect to static obstacles and between robots moving in the same airspace, often under dynamic constraints and imper f ect information [ 10 ]. Sur v eys of collision-av oidance schemes and autonomous drone sw ar ms emphasize the importance of principled separation constraints and reliable replanning mec hanisms that remain st able when multiple vehicles interact in close proximity [ 11 , 12 ]. In parallel, research on distributed ∗ Corresponding author yunes.alqadasi@kocaeli.edu.tr (Y . ALQUDSI) OR CID (s): 0000-0002-4246-9654 (Y . ALQUDSI) Y unes ALQUDSI, and Murat MAKARACI: Preprint submitted to Elsevier Page 1 of 14 Integrated Multi-Drone T ask Allo cation and T rajecto ry Generation in 3D Obstacle-Rich Environments coordination and collective decision-making in robot swarms continues to dev elop mechanisms that suppor t scalable group beha vior under limited communication [ 13 , 14 , 15 ]. From a planning standpoint, multi-drone missions typically couple at least two interacting lay ers. At the discrete la yer , the planner must assign goals to robots and determine feasible visit sequences (multi-robot task allocation) [ 16 , 17 ]. At the continuous lay er, t he planner must generate collision-free traject or ies t hat respect obstacle constraints, inter -robot separation, and vehicle dynamics [ 18 ]. While decoupling these la yers can simplify implementation, it can also yield br ittle solutions: an assignment t hat appears optimal under geometric distances may become inf easible once obstacles, timing, and dynamic limits are enforced. Related work in other domains has similarl y argued for integrated schedule-and-trajectory optimization when conflicts arise in shared spaces [ 19 ]. Metaheuristic optimization remains a practical c hoice f or the resulting combinator ial search space, especially when t he objective is a makespan and constraints must be c hecked repeatedly during evolution [ 20 , 21 , 22 ]. This w ork addresses this coupling through the Integ rated Multi-Drone T ask Allocation and Trajectory Gener - ation frame wor k (IMD–T APP), which builds en vironment-a w are tra vel-cos t matrices via graph searc h, optimizes assignments and visit orders via an injected particle swarm optimization (IPSO) algor ithm guided by multiple linear assignment, and then synt hesizes smooth, dynamically f easible trajectories with iterative saf ety validation and replanning. By combining en vironment-a ware cost constr uction wit h discrete optimization and continuous-time trajectory synthesis, IMD–T APP targets obst acle-rich 3D settings where both efficiency and saf ety are critical [ 23 ]. The main contr ibutions of this paper are: (1) an obstacle-aw are cost-construction module t hat uses 3D g raph search to populate robot-to-goal and goal-to-goal tra vel-cost matrices in cluttered en vironments; (2) a joint assignment-and- sequencing optimizer based on IPSO with multiple linear assignment (MLA) guidance, improving conv erg ence tow ard low -makespan solutions under t he visit-once constraint; and (3) an end-to-end planning-to-traject or y w orkflow that generates optimal trajectories and iteratively rev alidates obstacle clearance and inter -robot separation, tr iggering local replanning when safe ty constraints are violated. A detailed system schematic for the work presented in research is pro vided in Figure 1 , showing t he inputs, core processing stages, and validation loop of the complete IMD–T APP framew ork. The remainder of the paper is org anized as follo ws. Section 2 revie ws representative work on multi-robot task allocation and multi-agent path planning. Section 3 formalizes t he IMD–T APP problem, objective, and safe ty constraints. Section 4 presents t he proposed framew ork. Sections 5 and 6 describe t he simulation setup and discuss the results. Section 7 concludes the paper and summar izes limitations and future research directions. 2. Related W ork Multi-robot task allocation (MRT A) has been studied extensiv ely , with f oundational work pro viding tax onomies that distinguish problem variants by robot heterog eneity , task structure, and assignment coupling [ 24 , 25 ]. In t he conte xt of U A Vs and autonomous flying robots, MRT A is frequently coupled to routing because feasibility and cost depend strongl y on trav el distances through obstacle fields and on timing constraints [ 26 ]. Sur v eys of U A V routing and multi- U A V mission planning emphasize that coupling allocation decisions with en vironment-a ware tra vel costs is essential f or realistic performance ev aluation [ 1 , 27 , 28 ] and has motivated distributed MRT A strategies for scalability [ 14 ]. A related line of research concer ns the routing formulations that underlie multi-goal allocation problems. Multiple- tra veling-salesman and v ehicle-routing v ariants ha ve been in ves tigated through mathematical programming and heuristic approaches, including f ormulations and algorit hms that address assignment, sequencing, and f easibility constraints [ 29 , 30 , 31 ]. Dynamic variants incor porating additional limit ations, such as energy constraints, fur ther motiv ate algor ithms that balance solution quality with computational tract ability [ 32 , 33 ]. Optimization methods f or combinatorial multi-robot planning span exact solv ers, heur istics, and soft-computing techniq ues. Population-based methods are freq uently adopted when exact f or mulations are impractical at scale or when repeated f easibility chec ks are required under complex constraints [ 21 ]. Swarm-inspired coordination and hybrid metaheuristics hav e also been explored f or distributed settings [ 22 ], and recent work on collective decision-making highlights how adapt able mechanisms can support scalable group behavior in robo t swarms [ 13 ]. Saf e multi-agent navig ation is equall y critical in shared 3D en vironments. Many coordination problems can be mapped to multi-agent pathfinding (MAPF) on graphs, whic h plans conflict-free paths f or multiple ag ents while optimizing criter ia suc h as mak espan [ 34 ]. For large teams, scalability and saf ety are central concerns, and prior work has inv estigated safe, scalable, and complete motion planning f or large g roups of interchang eable robots [ 35 ]. In t he U A V conte xt, comple te flight trajectory planning for multiple v ehicles has also been studied, pro viding useful insights Y unes ALQUDSI, and Murat MAKARACI: Preprint submitted to Elsevier P age 2 of 14 Integrated Multi-Drone T ask Allo cation and T rajecto ry Generation in 3D Obstacle-Rich Environments Fig. 1: The IMD–T APP system schematic. The framewo rk tak es as inputs the 3D environment with obstacles, robot sta rt states 𝑣 𝑖 𝑅 , and goal set 𝐺 . The core p ro cessing stages include: (i) graph discretization and search to compute cost matrices 𝐂 𝑅𝐺 and 𝐂 𝐺𝐺 , (ii) IPSO with MLA guidance to optimize assignment and visit sequences, and (iii) minimum-snap trajecto ry generation to produce time-pa rameterized trajectories. The final stage validates obstacle clea rance and inter-rob ot sepa ration ( ≥ 2 𝑅 𝑟 𝜙 ) through simulation rollout, outputting collision-free multi-drone trajectories. into f easibility under constraints [ 36 ]. Collision av oidance remains a persistent challeng e in practice, and sur ve ys revie w sensing, planning, and a voidance strategies as well as open issues [ 10 , 11 , 12 ]. Integrated task assignment and path planning has therefore attracted increasing attention. Distr ibuted and decen- tralized strategies hav e been e xplored to support coordination under limited communication, dynamic conditions, and real-time replanning requir ements [ 15 , 37 , 38 ]. Recent studies examine synergistic coupling of allocation with obstacle- a ware planning [ 39 ] and lear ning-based coupling of assignment and navig ation in dynamic obstacle en vironments [ 40 ]. More broadly , related research in shared conflict zones has demonstrated the v alue of integrating sc heduling and trajectory optimization in a single decision loop [ 19 ], which is conceptually aligned with the motiv ation of IMD–T APP . Finall y , trajectory generation for q uadrotors commonly relies on pol ynomial optimization to obtain smooth and dynamically feasible flight profiles; minimum-snap f ormulations are par ticularly influential because t he y pr omote smoothness and enable constraint enf orcement along wa ypoint cor ridors [ 41 ]. Complementar y work has dev eloped numerically stable tra jector y generation and general optimization frame w orks f or highly maneuverable multirotor drones in complex en vironments [ 42 , 43 ], and integrated task assignment wit h tra jector y g eneration has been in vestig ated to impro ve collision av oidance and flight efficiency in multi-drone operations [ 44 ]. IMD–T APP follo ws this broad philosophy by combining graph-search cost constr uction with discrete optimization and continuous-time trajectory synthesis, while maint aining an explicit safety -validation loop. 3. Problem F ormulation W e consider a team of 𝑅 𝑁 aerial robots that must collectivel y visit a set of 𝐺 𝑁 goals in a bounded 3D workspace containing obstacles. Each goal must be visited ex actly once by any robot, and each robot must return to its takeoff point after completing its assigned goals (Figure 2 ). Y unes ALQUDSI, and Murat MAKARACI: Preprint submitted to Elsevier P age 3 of 14 Integrated Multi-Drone T ask Allo cation and T rajecto ry Generation in 3D Obstacle-Rich Environments Fig. 2: Illustrative IMD–T APP scenario: tw o drones must coop eratively visit seven goals in a 3D environment with obstacles, with each goal visited exactly once and each drone returnin g to its sta rt lo cation. The robots are treated as interchangeable with respect to goal servicing, and the en vironment is modeled as obstacle- rich and potentially challenging for line-of-sight motion. Let 𝑆 𝑞 𝑖 denote the goal sequence assigned to robot 𝑖 . 𝜓 𝑖𝑗 = { 1 if goal 𝑗 is assigned to drone 𝑖 0 otherwise (1) The trav ersal cost of a robot tour is denoted by 𝐶 ( 𝑣 𝑖 𝑅 → 𝑆 𝑞 𝑖 → 𝑣 𝑖 𝑅 ) and is computed from obstacle-aw are geometric path costs between successive wa ypoints, including (i) trav el from the robot star t 𝑣 𝑖 𝑅 to the first goal, (ii) trav el between consecutive goals in 𝑆 𝑞 𝑖 , and (iii) return from the last goal back to 𝑣 𝑖 𝑅 . The IMD–T APP objectiv e is to minimize the mission makespan, i.e., the maximum tour cost among all robots: 𝐽 ∗ = min 𝑆 𝑞 1 , … ,𝑆 𝑞 𝑅 𝑁 max 𝑖 ∈{1 , … ,𝑅 𝑁 } 𝐶 ( 𝑣 𝑖 𝑅 → 𝑆 𝑞 𝑖 → 𝑣 𝑖 𝑅 ) . (2) In many multi-goal aer ial missions, each drone is required to ter minate at a specified home or reco very location, which influences both allocation and timing decisions. where 𝑣 𝑖 𝑅 is the initial state of robot 𝑖 and 𝑆 𝑞 𝑖 denotes its ordered list of assigned goals (possibl y empty). For feasibility , robot motion must satisfy obstacle av oidance and inter-r obot safety . Collision a voidance betw een robots 𝑖 and 𝑗 is enforced through the distance constraint ‖ 𝜂 𝑖 ( 𝑡 ) − 𝜂 𝑗 ( 𝑡 ) ‖ ≥ 2 𝑅 𝑟 𝜙, 𝜙 > 1 , 𝑡 ∈ [ 𝑡 0 , 𝑡 𝑓 ] , (3) where 𝜂 𝑖 ( 𝑡 ) is the position of robot 𝑖 at time 𝑡 , and 𝑅 𝑟 is a spher ical saf ety radius that conser v ativel y approximates the robot body . In addition, dynamic feasibility must be considered when generating time-parameterized trajectories, including bounds on velocities and accelerations [ 43 ]. T o improv e readability , T able 1 summarizes the main symbols used in the f or mulation and algorit hm description. 4. Proposed IMD–T APP Framew ork The proposed pipeline addresses the IMD–T APP problem by combining (i) 3D graph constr uction and graph- search-based pathfinding, (ii) IPSO optimization guided by multiple linear assignment, and (iii) trajectory generation and validation for dynamic f easibility and collision a voidance. Figure 3 provides a high-le vel vie w of the complete pipeline. Y unes ALQUDSI, and Murat MAKARACI: Preprint submitted to Elsevier P age 4 of 14 Integrated Multi-Drone T ask Allo cation and T rajecto ry Generation in 3D Obstacle-Rich Environments T able 1 Key notation used in the IMD–T APP fo rmulation. Symb ol Meaning 𝑅 𝑁 numb er of rob ots (drones) 𝐺 𝑁 numb er of goals 𝑆 𝑞 𝑖 o rdered goal sequence assigned to rob ot 𝑖 𝐶 ( ⋅ ) travel cost computed from geometric paths 𝐽 ∗ optimal mission objective (makespan) 𝜂 𝑖 ( 𝑡 ) position of robot 𝑖 over time 𝑅 𝑟 conservative robot safety radius 𝜙 safet y inflation facto r ( 𝜙 > 1 ) Fig. 3: High-level overview of the IMD–T APP pip eline: (i) 3D wo rkspace discretization and graph-sea rch computation of obstacle-aw are travel costs,(ii) discrete optimization of goal assignment and visit sequencing using an injected (PSO) algo rithm guided by multiple linear assignment, and (iii) smo oth trajectory generation follow ed by safety validation with iterative replanning when necessary . 4.1. Cost-matrix construction via graph search The IMD–T APP discretizes the obstacle-filled workspace into a 3D graph and uses a graph-search algor ithm (GSA) to compute f easible paths betw een relev ant pairs of states [ 45 , 46 , 47 ]. Specifically , shortest-path costs are computed betw een each robot star t state and each goal (robots-to-goals matrix), and between each pair of goals (goals-to-goals matrix). Unreachable pairs are filtered to pre vent infeasible assignments from entering the optimization stage. Figure 4 illustrates the discretization of the 3D w orkspace into a navigable graph and demonstrates how obs tacle- a ware shor test paths computed via graph search (e.g., A*) populate the robots-to-goals cost matr ix 𝐂 𝑅𝐺 and goals-to- goals cost matrix 𝐂 𝐺𝐺 that ser v e as inputs to the discrete optimization stage. T o clarify how en vironment-a ware graph-search costs are conv er ted into a discre te optimization input, Figure 5 illustrates the construction of the robo ts-to-goals and goals-to-goals cost matrices and the corresponding particle encoding used by the IPSO stage (goal permutation and breakpoints ensur ing that each goal is visited ex actly once). Y unes ALQUDSI, and Murat MAKARACI: Preprint submitted to Elsevier P age 5 of 14 Integrated Multi-Drone T ask Allo cation and T rajecto ry Generation in 3D Obstacle-Rich Environments Fig. 4: 3D discretization and obstacle-a w are travel-cost computation. (a) The wo rkspace is discretized into a voxel graph with free-space nodes; obstacles blo ck direct paths, requiring graph search to find collision-free routes betw een robot starts 𝑣 𝑖 𝑅 , goals 𝑔 𝑝 and 𝑔 𝑞 . (b) Graph-sea rch distances p opulate the rob ots-to-goals matrix 𝐂 𝑅𝐺 (with entries 𝐶 ( 𝑣 𝑖 𝑅 , 𝑔 𝑗 ) ) and the goals-to-goals matrix 𝐂 𝐺𝐺 (with entries 𝐶 ( 𝑔 𝑝 , 𝑔 𝑞 ) ), which a re then used by the discrete optimizer to determine assignments and visit sequences. 4.2. Assignment and sequencing via injected (PSO) algor ithm Given trav el-cost matr ices, the discrete optimization stage seeks an assignment of goals to robots and an order ing of visits that minimizes the mak espan objectiv e in ( 2 ). The searc h space is combinatorial, gro ws rapidly wit h the number of goals, and is generall y NP-hard. The framew ork therefore adopts a (PSO) algor ithm variant [ 48 ] wit h injection mechanisms and str uctured guidance, exploiting both exploration and exploitation to a v oid premature con verg ence. Multiple linear assignment (MLA) is leverag ed to generate high-quality candidate sequences and to guide reorder ing within the PSO ev olution loop, improving con v ergence to war d low -cost solutions. Figure 6 summarizes the IPSO decision loop and highlights where multiple linear assignment (MLA) is used to seed and per iodicall y replace low -quality par ticles, t hereb y accelerating conv ergence while maintaining f easibility under the visit-once constraint. 4.3. T ra jectory generation and safety validation After obtaining an optimized discrete plan, each robot ’ s geometric pat h is conv erted into a time-parameterized trajectory . The trajectory g eneration stage uses inter mediate wa ypoints and an optimization routine t hat promotes smoothness (minimizing snap) while satisfying dynamic constraints [ 42 , 49 ]. The resulting trajectories are then iterativ ely validated against the inter-robo t separation constraint in ( 3 ); if violations are detected, local re-planning is triggered, and the final trajectories are revalidated [ 44 ]. The trajectory generation pipeline is detailed in Figure 7 , which illustrates how geometric wa ypoints obtained from the discrete plan are transformed into smooth, dynamically feasible trajectories through time allocation, piecewise polynomial optimization wit h snap minimization, and enf orcement of continuity constraints at wa ypoint junctions. As shown in Figure 8 , the continuous-time stage conv er ts the discrete plan into smooth trajector ies and t hen iterativ ely chec ks obstacle clearance and inter -drone separation; if violations are detected, the frame wor k tr iggers local re-planning and regenerates tra jector ies until the saf ety constraints are satisfied. Algorit hm 1 summarizes the complete IMD–T APP procedure. Y unes ALQUDSI, and Murat MAKARACI: Preprint submitted to Elsevier P age 6 of 14 Integrated Multi-Drone T ask Allo cation and T rajecto ry Generation in 3D Obstacle-Rich Environments 3D wo rkspace obstacles + bounds 3D graph nodes + edges Graph search (GSA) shortest paths Robots → Goals matrix 𝐶 𝑅 ∈ ℝ 𝑅 𝑁 × 𝐺 𝑁 [ 𝐶 𝑅 ] 𝑖,𝑗 = cost ( 𝑣 𝑖 → 𝑔 𝑗 ) Goals → Goals matrix 𝐶 𝐺 ∈ ℝ 𝐺 𝑁 × 𝐺 𝑁 [ 𝐶 𝐺 ] 𝑗 ,𝑘 = cost ( 𝑔 𝑗 → 𝑔 𝑘 ) Fitness evaluation makespan 𝐽 = max 𝑖 𝐶 ( 𝑆 𝑞 𝑖 ) Pa rticle p osition (solution enco ding) A particle enco des (i) a permutation of all goals (visit order) and (ii) b reakp oints that partition the ordered list among the 𝑅 𝑁 drones. Example ( 𝑅 𝑁 =2 , 𝐺 𝑁 =7 ): 𝜋 = [4 , 1 , 6 , 3 , 2 , 5 , 7] , b reakp oint 𝑏 =3 (first three goals fo r drone 1, remaining goals for drone 2). Drone 1: [4 , 1 , 6] → return | Drone 2: [3 , 2 , 5 , 7] → return Feasibilit y checks (enforced during deco ding/repair) (1) remove unreachable assignments (invalid matrix entries), (2) repair duplicates/miss- ing goals to satisfy “visit each goal once”, (3) validate breakpoint partitions for all drones. Fig. 5: Cost-matrix construction and solution enco ding for the discrete optimization stage. Graph search produces robots- to-goals and goals-to-goals travel-cost matrices, which are evaluated through a PSO pa rticle rep resentation enco ding a goal-visit permutation and b reakp oints that partition the o rdered goals among drones while enfo rcing the visit-once constraint. 5. Simulation Setup Simulations were ex ecuted using MA TLAB R2023b on a laptop equipped with an Intel(R) Core(TM) i7-1065G7 CPU @ 1.30GHz, NVIDIA GeForce GTX 1650 GPU with 4 GB dedicated memor y , and 16 GB RAM. Quadrotor parameters follo wed [ 50 ]. The robots were assumed to ha ve onboard sensing sufficient to detect obstacles and to suppor t replanning within the IMD–T APP pipeline. Figure 9 show s the representative 3D obstacle-filled en vironment used to illustrate the algor ithm. The initial robot states and goal locations are indicated for reproducibility of the q ualitative results. T o facilitate reproducibility , T able 2 summarizes t he main simulation and implementation settings reported in t his study . 6. Results and Discussion The IMD–T APP objectiv e is to determine an optimal sequence of goal visits f or each robot such that all goals are serviced e xactly once and each robo t retur ns to its star t point. The discrete stage therefor e balances the combinator ial Y unes ALQUDSI, and Murat MAKARACI: Preprint submitted to Elsevier P age 7 of 14 Integrated Multi-Drone T ask Allo cation and T rajecto ry Generation in 3D Obstacle-Rich Environments Inputs 𝐶 𝑅 , 𝐶 𝐺 constraints Swa rm init. particles encode routes+breakpoints Fitness makespan 𝐽 PSO update ( 𝜔, 𝑐 1 , 𝑐 2 ) 𝑣, 𝑥 𝑝𝑏𝑒𝑠𝑡 / 𝑔𝑏𝑒𝑠𝑡 update MLA-guided injection (i) Seed 𝜌 seed particles from MLA solutions (ii) Every 𝑓 inj iters: replace worst particles Repair / normalization enforce “visit once” fix breakpoints remove duplicates Stop 𝐼 max or tolerance Output best routes ( 𝑔𝑏𝑒𝑠𝑡 ) Fig. 6: Injected PSO with MLA guidance fo r joint goal assignment and sequencing. P articles enco de routes and breakpoints; fitness is evaluated using graph-search costs under the makespan objective. MLA is used both for seeding a fraction of the sw arm and for p erio dic injection (replacement of the wo rst particles), while a repair step maintains feasibility (each goal visited once and valid pa rtitioning). Fig. 7: Time-parameterized minimum-snap trajecto ry generation pip eline. The discrete plan p rovides geometric wa yp oints (rob ot start 𝑣 𝑖 𝑅 , assigned goals, and return-to-sta rt). Segment time allo cation assigns durations to each path segment. Piecewise p olynomial trajecto ries are then optimized to minimize integrated snap ∫ ‖ 𝑑 4 𝐱 𝑑 𝑡 4 ‖ 2 𝑑 𝑡 subject to continuity constraints (p osition, velo cit y , and acceleration continuous at junctions), producing smo oth p osition, velo cit y , and acceleration p rofiles suitable for quadroto r execution. Discrete plan goal sequences 𝑆 𝑞 𝑖 geometric waypoints T rajectory generation TGO / min-snap time parameterization T rajectory rollout sample states 𝜂 𝑖 ( 𝑡 ) Safety valid? obstacle & separation Local re-planning adjust timing / insert waypoint / reroute segment Final trajectories collision-free dynamically feasible yes no Key constraints Inter-robot: ‖ 𝜂 𝑖 ( 𝑡 ) − 𝜂 𝑗 ( 𝑡 ) ‖ ≥ 2 𝑅 𝑟 𝜙 Dynamics: b ounds on 𝑣 ( 𝑡 ) , 𝑎 ( 𝑡 ) Fig. 8: Safety validation and re-planning lo op in the continuous stage. The discrete plan is converted into time-parameterized trajecto ries; simulated rollouts are checked fo r obstacle clearance and inter-rob ot sepa ration (e.g., ‖ 𝜂 𝑖 ( 𝑡 ) − 𝜂 𝑗 ( 𝑡 ) ‖ ≥ 2 𝑅 𝑟 𝜙 ). If conflicts o ccur, local re-planning up dates the plan and the trajectories are regenerated until feasibility is achieved. search ov er permutations and partitions of goals across robots. As expected f or PSO-based methods, the balance betw een exploration and e xploit ation affects both con ver gence speed and solution quality [ 51 , 52 ]. Follo wing t he IMD–T APP procedure, g raph search is first used to g enerate collision-free geometric pat hs and to populate cost matr ices. The injected (PSO) algor ithm then selects routes and breakpoints t hat minimize t he makespan. An example of the resulting optimal sequence and task assignments is pro vided in Figure 10a , where t he assignment indicates which goals are visited b y each robot and in what order . The evolution of the mission-time objective over iterations is sho wn in Figure 10b . The figure illustrates the con ver gence beha vior of the discrete optimizer tow ard a low -cost assignment and ordering. After selecting the optimal discrete plan, geometric paths are generated for each robot and visualized in Figure 11a . These paths provide obstacle-a v oiding routes connecting each robot ’ s start state to its assigned goals. Y unes ALQUDSI, and Murat MAKARACI: Preprint submitted to Elsevier P age 8 of 14 Integrated Multi-Drone T ask Allo cation and T rajecto ry Generation in 3D Obstacle-Rich Environments Algorithm 1: IMD–T APP Algorithm Input: Number of drones, initial states, goals, saf e distance Output: Optimized trajectories 1 Initialization ; 2 Input drone numbers, initialize states and goals, define saf e distance; 3 Gr aph Generation and Pathfinding ; 4 Cons tr uct 3D graph of envir onment; 5 f or each drone 𝑖 and goal 𝑗 do 6 Compute optimal paths using GSA; 7 Populate R obots-to-Goals and Goals-to-Goals cost matrices; 8 end 9 F ilter unreachable goals and drones; 10 Assignment Optimization based on IPSO ; 11 Initialization ; 12 Define IPSO parameters:; 13 Sw arm size ( 𝑁 𝑠 ), maximum iterations ( 𝐼 max ), inertia weight ( 𝜔 ), cognitive and social coefficients ( 𝑐 1 , 𝑐 2 ), velocity bounds ( 𝑣 max ); 14 Define injection settings:; 15 MLA seeding ratio ( 𝜌 seed ), MLA replacement frequency ( 𝑓 inj ), random perturbation probability ( 𝑝 pert ); 16 Define Cost Function (Min- T ime / makespan); 17 Initialize par ticle positions as candidate routes and breakpoints (encode task order + par titioning), seed a subset using MLA solutions; 18 Initialize velocities and ev aluate fitness f or all par ticles; 19 Se t personal bests ( 𝑝𝑏𝑒𝑠𝑡 ) and global best ( 𝑔 𝑏𝑒𝑠𝑡 ); 20 Sw arm Evolution ; 21 f or 𝑡 = 1 to 𝐼 max do 22 Update v elocity and position of each particle using PSO r ules; 23 Repair/normalize inf easible encodings (duplicate goals, missing goals, inv alid breakpoints); 24 Evaluate fitness (mak espan); 25 Update 𝑝𝑏𝑒𝑠𝑡 and 𝑔 𝑏𝑒𝑠𝑡 ; 26 if mod( 𝑡 , 𝑓 inj ) = 0 then 27 Replace the worst particles with MLA-refined solutions (injection); 28 end 29 Apply random per turbation / reinitialization with probability 𝑝 pert to a void s t agnation; 30 end 31 Obtain the best routes and breakpoints from 𝑔 𝑏𝑒𝑠𝑡 ; 32 T rajectory Generation ; 33 f or each drone 𝑖 do 34 Compute intermediate wa ypoints and generate trajectory states based on Tra jector y Generation and Optimization (TGO) algorit hm [ 42 ]; 35 V alidate and re-plan for collision a voidance; 36 end 37 Synthesize and re-v alidate dynamic trajectories [ 44 ]; 38 Simulation and Visualization ; 39 Ex ecute animation and derive simulation results; Ne xt, time-parameter ized trajectories are synthesized from the geometric paths. Figure 11b presents the resulting trajectories, which satisfy wa ypoint passage and promote smooth motion by minimizing snap, while respecting f easibility constraints. In t his representative case study with two quadr otor robots, the minimum total mission time achie ved b y the algor ithm was 136 sec. Y unes ALQUDSI, and Murat MAKARACI: Preprint submitted to Elsevier P age 9 of 14 Integrated Multi-Drone T ask Allo cation and T rajecto ry Generation in 3D Obstacle-Rich Environments Fig. 9: 3D obstacle-filled environment used in the simulation study , illustrating the initial positions of the rob ots and the set of goal lo cations. T able 2 Simulation and implementation settings used in the case study . Item Setting Soft wa re MA TLAB R2023b CPU Intel Co re i7-1065G7 @ 1.30 GHz GPU NVIDIA GeF orce GTX 1650 (4 GB) RAM 16 GB Rob ot mo del pa rameters As in [ 50 ] Environment 3D w orkspace with obstacles (Figure 9 ) Objective Minimize mak espan (Equation 2 ) Safet y constraint Inter-rob ot separation (Equation 3 ) For a detailed vie w of the robot states and their e volution o ver time, Figure 12a provides sample state trajectories. Over all, t he results demonstrate that IMD–T APP can allocate tasks and generate saf e trajector ies f or aer ial robot teams operating in cluttered 3D en vironments. T o validate that the generated trajectories satisfy the required safe ty constraints throughout a mission, Figure 12b presents time histories of the minimum inter-robo t separation and minimum obstacle clearance of another mission scenario. Both metrics remain abov e their respective safety thresholds f or the entire mission duration, confir ming collision-free operation. 7. Conclusion and Future W or k This paper presented IMD–T APP , an integrated framew ork for multi-drone goal allocation, visit sequencing, and trajectory generation in obst acle-rich 3D en vironments. The framew ork (i) computes obstacle-a w are tra vel costs via 3D g raph search, (ii) sol ves the coupled assignment-and-ordering problem using IPSO with MLA guidance under a makespan objectiv e, and (iii) produces smooth minimum-snap trajectories with iterative safety validation and local re-planning. MA TLAB simulations demonstr ate end-to-end feasibility on represent ativ e 3D obstacle fields, including Y unes ALQUDSI, and Murat MAKARACI: Preprint submitted to Elsevier P age 10 of 14 Integrated Multi-Drone T ask Allo cation and T rajecto ry Generation in 3D Obstacle-Rich Environments (a) (b) Fig. 10: Discrete optimization results. (a) Example optimal sequence and task assignment obtained by the IPSO optimizer, sho wing the o rdered goals assigned to each rob ot and the required return to the takeoff p oint. (b) Mission-time objective as a function of iteration number, demonstrating the convergence b ehavio r of the discrete optimization stage. (a) Obstacle-a voiding geometric paths generated for t he opti- mized assignment sequence, illustrating each robot ’ s planned route through its assigned goals. (b) Time-parame ter ized trajectories generated f or each robot, en- suring smooth motion and passage through all designated points while promoting dynamic f easibility via snap minimization. Fig. 11: Compa rison of (a) geometric paths and (b) time-pa rameterized trajectories for the optimized assignment sequence. a case study in whic h tw o drones ser vice multiple goals and complete t he mission in 136 sec while satisfying obstacle- a voidance and inter -robot separation constr aints. Future w ork should strengthen the empirical ev aluation and broaden applicability . Hardware experiments are needed to evaluate robustness to s tate-estimation uncert ainty , communication delay , and model mismatc h, and to v alidate computational perf or mance under real-time constr aints. Finall y , extending the framew ork to handle heterog eneous robots, limited batter y budgets, and mission-le vel constraints (e.g., time windo ws, precedence, or revisits) would furt her increase its relev ance to practical inspection, monitoring, and search-and-rescue deployments. Declaration of compe ting interes t The authors declare that the y hav e no known competing financial interests or personal relationships that could ha v e appeared to influence the work repor ted in this paper . Ref erences [1] D. Rojas Viloria, E. L. Solano-Char ris, A. Muñoz- V illamizar, J. R. Montoya- Torres, Unmanned aer ial vehicles/drones in vehicle routing problems: a literature revie w , Inter national Transactions in Operational Research 28 (2021) 1626–1657. Y unes ALQUDSI, and Murat MAKARACI: Preprint submitted to Elsevier P age 11 of 14 Integrated Multi-Drone T ask Allo cation and T rajecto ry Generation in 3D Obstacle-Rich Environments (a) Sample simulation results showing the states of each robot as a function of time for t he generated time-parameterized tra jector ies. (b) Safe ty validation metr ics dur ing multi-drone ex ecution. (i) Minimum inter -robot separation versus time, demonstrating that the constraint is sat- isfied throughout the mission. (i) Minimum obstacle clearance versus time, showing that all robots maint ain adequate separation from obstacles. Both metrics remain above their saf ety thresholds, validating the collision-free operation of the generated tra jector ies. Fig. 12: Simulation outputs: (a) robot states over time and (b) safet y validation metrics for the executed trajectories. [2] J. del Cer ro, C. Cr uz Ulloa, A. Bar rientos, J. de León Rivas, Unmanned aer ial vehicles in agr iculture: A sur ve y , Agronomy 11 (2021) 203. [3] Y . Alqudsi, H. Sulaiman, Advancements and challenges in vtol ua vs configurations and emerging trends, in: 2025 5th Inter national Conference on Emerging Smart Tec hnologies and Applications (eSmarT A), IEEE, 2025, pp. 1–8. [4] R. Maity , R. Mishra, P . K. Pattnaik, Fl ying robot path planning techniques and its trends, Materials Today : Proceedings 80 (2023) 2187–2192. [5] Z. Du, C. Luo, G. Min, J. Wu, C. Luo, J. Pu, S. Li, A sur ve y on autonomous and intelligent swarms of uncrewed aerial vehicles (ua vs), IEEE Transactions on Intelligent Transportation Systems (2025). [6] Y . Alqudsi, Coordinated f or mation control for sw ar m flying robots, in: 2024 1st Inter national Conference on Emerging T echnologies for Dependable Inter net of Things (ICETI), IEEE, 2024, pp. 1–8. [7] Y . Zhang, L. Zhang, H. W ang, F. E. Bustamante, M. Rubenstein, Swarmtalk -tow ards benchmark sof tw are suites f or swarm robotics platforms, in: Proceedings of the 19th Inter national Conference on Autonomous Agents and MultiAgent Systems, 2020, pp. 1638–1646. [8] R. Ghanem, I. M. Ali, K. Kasmarik, M. Garratt, A decision suppor t framewor k on simulation fidelity f or transf erable and autonomously optimised swarm behaviour , Inter national Jour nal of Production Research (2025) 1–22. [9] S. Jav ed, A. Hassan, R. Ahmad, W . Ahmed, R. Ahmed, A. Saadat, M. Guizani, State-of-the-art and future research challenges in uav swarms, IEEE Inter net of Things Jour nal (2024). [10] H. Haf ezi, A. Bakhtiar i, A. Khaki-Sedigh, Design and implementation of a fault-tolerant controller using control allocation techniques in the presence of actuators saturation for a vtol octorotor, Robotica 40 (2022) 3057–3076. [11] M. R. Rezaee, N. A. W . A. Hamid, M. Hussin, Z. A. Zukarnain, Comprehensiv e review of drones collision av oidance schemes: Challenges and open issues, IEEE Transactions on Intelligent Transportation Systems (2024). [12] J. Saunders, S. Saeedi, W . Li, Autonomous aer ial robotics for pac kage delivery: A technical revie w , Jour nal of Field Robotics 41 (2024) 3–49. [13] A . Almansoori, M. Alkilabi, E. Tuci, On the e volution of adaptable and scalable mec hanisms f or collectiv e decision-making in a swarm of robots, Swarm Intelligence 18 (2024) 79–99. [14] O. Shor in wa, T . Halsted, J. Y u, M. Schw ager, Distributed optimization methods for multi-robot systems: Par t 1—a tutorial, IEEE Robotics & Automation Magazine (2024). [15] Z. W ang, J. Li, J. Li, C. Liu, A decentralized decision-making algorit hm of uav sw ar m with information fusion strategy , Exper t Systems with Applications 237 (2024) 121444. [16] Y . Song, Z. Ma, N. Chen, S. Zhou, S. Srig rarom, Comparative analysis of centralized and distributed multi-uav task allocation algorit hms: A unified evaluation framew ork, Drones 9 (2025) 530. [17] W . Dai, U. Rai, J. Chiun, C. Y uhong, G. Sar toretti, Heterogeneous multi-robot task allocation and scheduling via reinf orcement lear ning, IEEE Robotics and Automation Letters (2025). [18] Y . Alqudsi, Advanced control techniques for high maneuverability trajectory tracking in autonomous aerial robots, in: 2024 1st International Conf erence on Emerging Tec hnologies for Dependable Inter net of Things (ICETI), IEEE, 2024, pp. 1–8. [19] Z. Y ao, H. Jiang, Y . Cheng, Y . Jiang, B. Ran, Integrated schedule and trajectory optimization for connected automated vehicles in a conflict zone, IEEE Transactions on Intelligent Transportation Systems 23 (2020) 1841–1851. Y unes ALQUDSI, and Murat MAKARACI: Preprint submitted to Elsevier P age 12 of 14 Integrated Multi-Drone T ask Allo cation and T rajecto ry Generation in 3D Obstacle-Rich Environments [20] Y . Alqudsi, An injected multi-objective metaheur istic approach for optimizing aer ial-robot swarm guidance in cluttered environments, Applied Soft Computing (2025) 113379. [21] E. Osaba, J. Del Ser, A. Iglesias, X.-S. Y ang, Sof t computing f or swarm robotics: ne w trends and applications, Jour nal of Computational Science 39 (2020) 101049. [22] Y . Meng, O. K azeem, J. C. Muller, A hybrid aco/pso control algor ithm for distributed swarm robots, in: 2007 IEEE Swarm Intelligence Symposium, IEEE, 2007, pp. 273–280. [23] Y . Alq udsi, Integrated optimization of simultaneous tar get assignment and path planning f or aerial r obot sw arm, The Journal of Supercomputing 81 (2025) 1–24. [24] B. P . Gerk ey , M. J. Mat arić, A formal analy sis and t ax onomy of task allocation in multi-robot systems, The Inter national journal of robotics research 23 (2004) 939–954. [25] S. A. Ghaur i, M. Sarfraz, R. A. Qamar, M. F. Sohail, S. A. Khan, A revie w of multi-uav task allocation algorithms f or a search and rescue scenario, Jour nal of Sensor and Actuator Netw orks 13 (2024) 47. [26] Y . Chen, R. Chen, Y . Huang, Z. Xiong, J. Li, Distributed task allocation f or multiple uavs based on sw arm benefit optimization, Drones 8 (2024) 766. [27] J. Song, K. Zhao, Y . Liu, Survey on mission planning of multiple unmanned aerial vehicles, Aerospace 10 (2023) 208. [28] Q. Peng, H. Wu, R. Xue, Revie w of dynamic t ask allocation methods for uav swarms or iented to g round targets, Complex System Modeling and Simulation 1 (2021) 163–175. [29] E. Lalla-Ruiz, M. Mes, Mathematical f or mulations and impro vements for the multi-depot open v ehicle routing problem, Optimization Letters 15 (2021) 271–286. [30] Y . Shuai, S. Y unfeng, Z. Kai, An effective method f or solving multiple trav elling salesman problem based on nsga-ii, Systems Science & Control Engineer ing 7 (2019) 108–116. [31] S. Saad, W . N. W an Jaafar , S. J. Jamil, Solving standard tra veling salesman problem and multiple tra veling salesman problem by using branch-and-bound, in: AIP Conference Proceedings, American Institute of Physics, 2013, pp. 1406–1411. [32] G. Polyc hronis, Inv estigating the Dynamic Multi- V ehicle Routing Problem under Energy Constraints, Master’ s thesis, University of Thessaly , 2021. [33] Y . Alqudsi, M. Makaraci, T owar ds optimal guidance of autonomous swarm drones in dynamic constrained environments, Exper t Systems 42 (2025) e70067. [34] R. Stern, N. Stur tev ant, A. Felner , S. Koenig, H. Ma, T. W alker , J. Li, D. Atzmon, L. Cohen, T . Kumar, et al., Multi-agent pat hfinding: Definitions, variants, and benchmarks, in: Proceedings of the International Symposium on Combinatorial Searc h, v olume 10, 2019, pp. 151–158. [35] M. T ur pin, Saf e, scalable, and complete motion planning of lar ge teams of interc hangeable robots, 2014. Publicly Accessible Penn Dissert ations. [36] M. Burger , M. Huisk amp, T . Keviczky , Complete field co verag e as a multi-vehicle routing problem, IF AC Proceedings V olumes 46 (2013) 97–102. [37] Y . Du, Multi-uav search and rescue wit h enhanced a* algor ithm pat h planning in 3d en vironment, Inter national Jour nal of Aerospace Engineering 2023 (2023) 8614117. [38] Y . Li, S. Li, Y . Zhang, W . Zhang, H. Lu, Dynamic route planning for a usv-ua v multi-robot sys tem in the rendezvous task with obstacles, Journal of Intelligent & Robotic Systems 107 (2023) 52. [39] G. E. M. Abro, Z. A. Ali, R. J. Masood, Synergis tic uav motion: A comprehensive revie w on advancing multi-agent coordination, IECE Transactions on Sensing, Communication, and Control 1 (2024) 72–88. [40] X. K ong, Y . Zhou, Z. Li, S. W ang, Multi-uav simultaneous target assignment and path planning based on deep reinforcement learning in dynamic multiple obstacles environments, Frontiers in Neurorobotics 17 (2024) 1302898. [41] D. Mellinger , V . Kumar , Minimum snap trajector y generation and control for quadrotors, in: 2011 IEEE international conference on robotics and automation, IEEE, 2011, pp. 2520–2525. [42] Y . Alqudsi, M. Makaraci, A. Kassem, G. El-Bay oumi, A numer ically -stable trajector y generation and optimization algorithm f or autonomous quadrotor ua vs, Robotics and Autonomous Systems 170 (2023) 104532. [43] Y . S. Alqudsi, A. H. Kassem, G. El-Ba youmi, A general real-time optimization frame work f or pol ynomial-based trajectory planning of autonomous flying robots, Proceedings of the Institution of Mechanical Engineers, Par t G: Jour nal of Aerospace Engineering 237 (2023) 29–41. [44] Y . S. Alqudsi, R. A. A. Saleh, M. Makaraci, H. M. Er tunç, Enhancing aer ial robots performance through robust hybrid control and metaheur istic optimization of controller parameters, Neural Computing and Applications 36 (2024) 413–424. [45] K. Arshid, A. Kray ani, L. Marcenaro, D. M. Gomez, C. Regazzoni, T ow ard autonomous uav swarm navig ation: A revie w of trajectory design paradigms, Sensors (Basel, Switzerland) 25 (2025) 5877. [46] Z. Zhang, J. Jiang, K. V . Ling, X. W ang, W . A. Zhang, Cooperative pat h planning for heterogeneous uav swarms: A stackelberg game approach, IEEE Transactions on Automation Science and Engineer ing (2025). Early Access. [47] Y . Alqudsi, Anal ysis and implementation of motion planning algorithms f or real-time navig ation of aerial robots in dynamic envir onments, in: 2024 4th Inter national Conference on Emerging Smar t Technologies and Applications (eSmarTA), IEEE, 2024, pp. 1–10. [48] F . Tao, Z. Chen, Z. W ang, L. Zhu, J. W ang, Multi-strategy improv ed particle swarm optimization algorithm f or path planning of ua v in 3-d low altitude urban environment, IEEE Inter net of Things Jour nal (2025). [49] L. Lian, X. Zong, K. He, Z. Y ang, Tra jector y optimization of unmanned surface vehicle based on improv ed minimum snap, Ocean Engineer ing 302 (2024) 117719. [50] Y . Alqudsi, A. Kassem, G. El-Bayoumi, A robust hybrid control f or autonomous flying robots in an uncertain and disturbed envir onment, INCAS Bulletin 13 (2021). Y unes ALQUDSI, and Murat MAKARACI: Preprint submitted to Elsevier P age 13 of 14 Integrated Multi-Drone T ask Allo cation and T rajecto ry Generation in 3D Obstacle-Rich Environments [51] Y . Qi, H. Jiang, G. Huang, L. Y ang, F. W ang, Y . Xu, Multi-uav path planning considering multiple energy consumptions via an improv ed bee f oraging lear ning par ticle swarm optimization algorithm, Scientific Reports 15 (2025) 1–16. [52] Y . Liu, H. Zhang, H. Zheng, Q. Li, Q. Tian, A spherical vector -based adaptive evolutionary particle swarm optimization f or uav pat h planning under t hreat conditions, Scientific Repor ts 15 (2025) 2116. Y unes ALQUDSI, and Murat MAKARACI: Preprint submitted to Elsevier P age 14 of 14
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment