Detection of local geometry in random graphs: information-theoretic and computational limits
We study the problem of detecting local geometry in random graphs. We introduce a model $\mathcal{G}(n, p, d, k)$, where a hidden community of average size $k$ has edges drawn as a random geometric graph on $\mathbb{S}^{d-1}$, while all remaining edg…
Authors: Jinho Bok, Shuangping Li, Sophie H. Yu
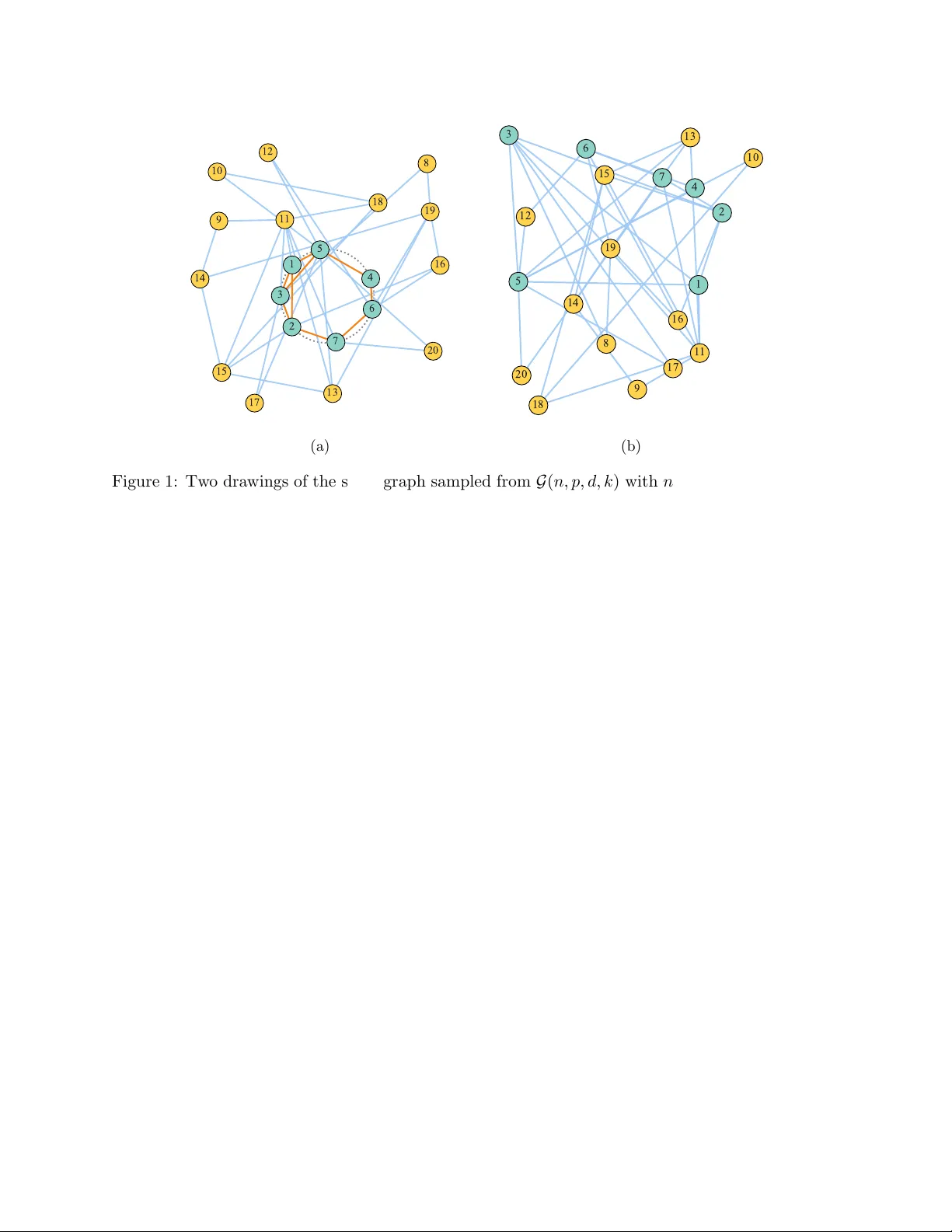
Detection of lo cal geometry in random graphs: information-theoretic and computational limits Jinho Bok ∗ , Sh uangping Li † , and Sophie H. Y u ‡ Marc h 25, 2026 Abstract W e study the problem of detecting lo cal geometry in random graphs. W e in tro duce a mo del G ( n, p, d, k ), where a h idden comm unit y of a v erage size k has edges dra wn as a random geometric graph on S d − 1 , while all remaining edges follow the Erd˝ os–R ´ en yi mo del G ( n, p ). The random geometric graph is generated by thresholding inner pro ducts of laten t vectors on S d − 1 , with eac h edge having marginal probability equal to p . This implies that G ( n, p, d, k ) and G ( n, p ) are indistinguishable at the lev el of the marginals, and the signal lies entirely in the edge dep endencies induced by the lo cal geometry . W e inv estigate b oth the information-theoretic and computational limits of detection. On the information-theoretic side, our upp er b ounds follow from three tests based on signed triangle coun ts: a global test, a scan test, and a constrained scan test; our low er b ounds follow from t wo complemen tary metho ds: truncated second moment via Wishart–GOE comparison, and tensorization of KL divergence. These results together settle the detection threshold at d = e Θ( k 2 ∨ k 6 /n 3 ) for fixed p , and extend the state-of-the-art b ounds from the full model (i.e., k = n ) for v anishing p . On the computational side, we iden tify a computational–statistical gap and provide evidence via the lo w-degree polynomial framew ork, as w ell as the suboptimality of signed cycle coun ts of length ℓ ≥ 4. ∗ J. Bok is with the Department of Statistics and Data Science, The Wharton Sc ho ol, Universit y of Pennsylv ania. Email: jinhobok@wharton.upenn.edu . † S. Li is with the Departmen t of Statistics and Data Science, Y ale Univ ersity . Email: shuangping.li@yale.edu . ‡ S. H. Y u is with the Op erations, Information and Decisions Department, The Wharton School, Universit y of P ennsylv ania. Email: hysophie@wharton.upenn.edu . Con ten ts 1 In tro duction 1 1.1 Our con tributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.2 Related literature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 1.3 Notations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 2 Main results 7 2.1 Information-theoretic upp er bound . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 2.2 Information-theoretic lo w er b ound . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 2.3 Computational lo w er b ound . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 3 T ec hnical ov erview 11 4 Pro ofs for information-theoretic upp er b ound 13 4.1 Global test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 4.2 Scan test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 4.3 Constrained scan test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 5 Pro ofs for information-theoretic low er b ound 19 5.1 T runcated second moment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 5.2 T ensorization of KL divergence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 6 Pro ofs for computational low er b ound 27 6.1 Lo w-degree lo wer b ound . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 6.2 Sub optimalit y of longer cycle counts . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 7 Discussion 30 References 31 A Auxiliary lemmas 37 A.1 Concentration inequalities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37 A.2 Upp er b ound on signed subgraph coun ts . . . . . . . . . . . . . . . . . . . . . . . . . 39 B Deferred pro ofs in Section 4 39 B.1 V ariance of signed triangle count (Lemma 4.4) . . . . . . . . . . . . . . . . . . . . . 39 B.2 T ypical b eha vior of signed w edge coun t (Lemma 4.5) . . . . . . . . . . . . . . . . . . 41 B.2.1 V ariance of signed wedge coun t . . . . . . . . . . . . . . . . . . . . . . . . . . 44 C Deferred pro ofs in Section 5 46 C.1 TV distance betw een Wishart and spherical Wishart (Prop osition 5.1) . . . . . . . . 46 C.2 Decomposition of likelihoo d ratio (Lemma 5.3) . . . . . . . . . . . . . . . . . . . . . 51 C.3 Upper b ound on cub ed h yp ergeometric (Lemma 5.4) . . . . . . . . . . . . . . . . . . 55 C.4 T ypical b eha vior of neighborho o d distributions (Lemma 5.5) . . . . . . . . . . . . . 56 D Deferred pro ofs in Section 6 61 D.1 Tight bounds on signed cycle counts (Proposition 6.1) . . . . . . . . . . . . . . . . . 61 D.1.1 Gegen bauer p olynomials and spherical harmonics . . . . . . . . . . . . . . . . 61 D.1.2 Tigh t b ounds on signed cycle coun ts . . . . . . . . . . . . . . . . . . . . . . . 62 1 In tro duction Net w orks across multiple domains often contain inherent structures [ New10 , Bar16 ]: communities in so cial net w orks [ HLL83 , GN02 , F or10 ], functional mo dules in biological systems [ HHLM99 , SM03 , BO04 ], and anomalous subgraphs in comm unication net works [ PCMP05 , A TK15 ]. Detecting suc h structure from noisy observ ations is a fundamen tal statistical problem, whic h has also driv en significan t adv ances in probability theory , com binatorics, and theory of algorithms. Prominen t mo dels for this task include the sto c hastic blo c k mo del [ HLL83 , DKMZ11 , Abb17 ], the plan ted clique [ Jer92 , Kuˇ c95 ], the planted dense subgraph [ ACV14 , HWX15 , V A C15 ], and the planted matc hing [ MMX21 , D WXY23 ], each serving as a b enc hmark for understanding statistical and computational phase transitions in structured random graphs. The hidden subgraphs in these mo dels are often assumed to b e “simple”, ha ving a distinctive com binatorial shap e or an elev ated edge densit y relative to the background. While analytically con v enien t, such assumptions can b e misaligned with real-world net works, where the defining sig- nature of a subgraph ma y lie not in its density or shap e but in how its vertices relate through their laten t features. In particular, edges are influenced by the similarity b et ween those features (e.g., p ersonal profiles, textual represen tations, biological summaries), which is often mo deled through laten t space [ HRH02 , Pen03 , HR T07 , NC16 ]. Under this p erspective, the structure to b e detected is b etter described by its in teraction patterns that are consisten t with the underlying geometry . This distinction is especially imp ortan t in settings where eac h vertex resembles or imitates the others. F or instance, in so cial netw orks, the subgraph of interest ma y b e a small group of genuine users among b ots [ FVD + 16 ], or a set of accoun ts under coordination for influence [ PHT + 21 ]; similarly , in economic netw orks the subgraph ma y consist of firms under collusion in a marketplace [ MO18 , WK19 ]. In suc h cases, eac h vertex may app ear to b e statistically similar despite the in teractions within the subgraph at the lev el of the laten t space. F urthermore, those in teractions are often inheren tly in tricate, characterized b y contextual or longitudinal features in high dimensions. Motiv ated by the geometry-based signals as describ ed, we in tro duce a random graph mo del in whic h a small, hidden communit y exhibits lo c al ge ometry . W e fo cus on the fundamental task of dete ction : given an observed graph G on v ertex set [ n ], decide whether it was generated from a n ull mo del with no signal or from our prop osed alternativ e mo del. F ormally , we consider the h yp othesis testing problem P := G ( n, p, d, k ) vs. Q := G ( n, p ) , where Q is the Erd˝ os–R ´ en yi mo del [ ER59 ] and P is a plan ted version of the high-dimensional random geometric graph mo del [ DGLU11 ]. Under P , a hidden set S of exp ected size k (which w e refer to as the comm unit y) carries laten t feature v ectors, and edges within S are formed according to geometric proximit y in a d -dimensional laten t space; all remaining edges b eha ve as in G ( n, p ). W e now give the formal definition of P . Definition 1.1 (Random graphs with local high-dimensional geometry) . A sample G ∼ P is dr awn as fol lows: 1. Each vertex i ∈ [ n ] joins the c ommunity S indep endently with pr ob ability k /n . 2. Each c ommunity vertex i ∈ S r e c eives a latent fe atur e ve ctor U i i . i . d . ∼ U ( S d − 1 ) . 3. F or any i, j ∈ [ n ] with i = j , if i, j ∈ S , e dge ij is pr esent iff ⟨ U i , U j ⟩ ≥ τ ( p, d ) ; otherwise e dge ij is pr esent indep endently with pr ob ability p . The thr eshold τ ( p, d ) is chosen so that P ( ⟨ U i , U j ⟩ ≥ τ ( p, d )) = p . 1 1 2 3 4 5 6 7 8 9 10 1 1 12 13 14 15 16 17 18 19 20 (a) 1 2 3 4 5 6 7 8 9 10 1 1 12 13 14 15 16 17 18 19 20 (b) Figure 1: Tw o drawings of the same graph sampled from G ( n, p, d, k ) with n = 20, p = 0 . 18, k = 7; w e set d = 2 for visualization purp oses. (a) V ertices are p ositioned to reflect the latent geometry: the k = 7 comm unity vertices (circled, teal) ha ve latent vectors drawn from U ( S 1 ), so they lie on a circle in the latent space. The orange edges—based on geometric proximit y—rev eal the resulting cycle-ric h structure induced b y the lo cal geometry . (b) V ertices are p ositioned randomly , and the plan ted comm unity b ecomes visually indistinguishable from the Erd˝ os–R ´ enyi bac kground. W e only observe the final graph G ; neither the communit y S nor the latent v ectors { U i } are observ ed. Moreo v er, b y construction, ev ery edge marginally app ears with probabilit y p , and vertices ha v e the same marginal neighborho o d distribution regardless of whether they b elong to S . Th us, the signal is not visible at the lev el of the first moment and is instead carried by the dep endence structure induced by the lo cal geometry . An illustration of a sample from G ( n, p, d, k ) is pro vided in Figure 1 . When k = n , we write the distribution G ( n, p, d, k ) as G ( n, p, d ); this is the traditional high-dimensional random geometric graph [ DGLU11 ] studied in the literature, whic h w e refer to as the full mo del. W e study when detection is p ossible as n → ∞ , allo wing the parameters p, d, k to dep end on n (and hence on eac h other). W e use the following standard notions. Definition 1.2. F or the dete ction pr oblem of P vs. Q , a test statistic f ( G ) with thr eshold γ achieves (a) strong detection if P G ∼Q ( f ( G ) > γ ) + P G ∼P ( f ( G ) ≤ γ ) = o (1) ; (b) w eak detection if P G ∼Q ( f ( G ) > γ ) + P G ∼P ( f ( G ) ≤ γ ) = 1 − Ω(1) . It is w ell-kno wn (by the Neyman–Pearson lemma) that the infimum of the sum of type I and t yp e II errors equals 1 − d TV ( P , Q ). In particular, no test can ac hieve w eak detection if d TV ( P , Q ) = o (1). In tuitively , detection b ecomes harder as the dimension d gro ws, since the geometric constrain ts induce w eaker dep endencies among edges in higher dimensions. Our main goal is to quantitativ ely c haracterize ho w large d can b e (as a function of n, p, k ) while detection remains p ossible. 2 0 1 / 2 3 / 4 1 γ 0 3 / 2 3 β ( a ) α = 0 1 / 3 1 / 2 2 / 3 3 / 4 1 γ 0 1 / 3 1 / 2 2 7 / 3 ( b ) α = 1 / 3 P ossible & easy P ossible & hard Unknown & hard Impossible Figure 2: Phase diagram for detection, for (a) α = 0 and (b) α = 1 / 3. Note that the tw o plots are in differen t scales. In the p ossible & easy phase (green), strong detection can b e done b y an efficien t test statistic. In the p ossible & hard phase (y ello w), strong detection can b e done b y an inefficien t test statistic, and weak detection is imp ossible for lo w-degree p olynomial algorithms. In the unknown & hard phase (grey), it is op en whether strong detection is p ossible, but weak detection is imp ossible for lo w-degree p olynomial algorithms. Finally , in the imp ossible phase (magen ta), weak detection is impossible. The imp ossible phases extend to all v alues of β > 0 b ey ond those presented in the plots. 1.1 Our con tributions W e characterize when the detection betw een P and Q is p ossible, tracing out b oth the information- theoretic and computational limits as functions of n, p, d, k . The following theorem summarizes our main results in the log-density setting [ BCC + 10 ]; see Figure 2 for the resulting phase diagrams. Theorem 1.3 (Informal) . L et p = Θ( n − α ) , d = Θ( n β ) , k = Θ( n γ ) , wher e 0 ≤ α < 1 , β > 0 , and 0 < γ ≤ 1 . (i) If β < 6 γ − 3 α − 3 , str ong dete ction is p ossible with a test statistic that is efficiently c omputable. (ii) If β < 2 γ − 3 α , str ong dete ction is p ossible with a test statistic that is inefficiently c omputable. (iii) If any of the fol lowing holds, we ak dete ction is imp ossible: • β > 2 γ ∨ (6 γ − 3) ; • β > (2 γ − 2 α ) ∨ (4 γ − 2 α − 1) and γ > α . (iv) If β > 6 γ − 3 α − 3 , we ak dete ction is imp ossible for low-de gr e e p olynomial algorithms. 3 Information-theoretic limits. Parts (i)–(iii) of Theorem 1.3 together characterize the information- theoretic threshold for detection. On the upp er b ound side, w e propose three tests based on signe d triangle c ounts : a global test (coun ting o v er the entire graph), a scan test (taking the maxim um signed triangle count o v er all subsets of size ≈ k ), and a constrained scan test (further restricting to subsets with con trolled w edge sums). The scan test cov ers a complementary regime to the global test—whic h together suffice for fixed p —and the constrained scan test strictly extends the param- eter regime of the scan test when p = e o (1). F or details, see Theorems 2.1 , 2.2 and 2.3 . On the lo w er b ound side, we develop tw o complementary approac hes: truncated second moment, which captures the dep endence on the a verage communit y size k ; and tensorization of KL divergence, whic h captures the dep endence on the edge densit y p . F or details, see Theorems 2.5 and 2.6 . In the dense case ( α = 0), com bining those upp er and low er bounds settles the detection threshold sharply at d = e Θ( k 2 ∨ k 6 /n 3 ); see Figure 2 (a). F or 0 < α < 1, our results generalize the state-of-the-art b ounds for the full mo del G ( n, p, d ) (the sp ecial case k = n , i.e., γ = 1), recov ering the upp er b ound d = e o ( n 3 p 3 ) and low er b ound d = e Ω( n 3 p 2 ) of [ LMSY22 ] and extending them to our plan ted setting for all k = Θ( n γ ) with γ ∈ ( α , 1); see Figure 2 (b). Our results lea ve a gap (the unkno wn & hard region in Figure 2 (b)) b et ween upp er and low er b ounds when 0 < α < 1; w e conjecture that the upp er bounds are tight and that this region is in fact in the imp ossible phase. Computational limits. Part (iv) of Theorem 1.3 pro vides evidence that the regime b ey ond part (i) is computationally hard, based on the low-de gr e e p olynomial fr amework [ Hop18 , KWB22 , W ei25 ] (see Sections 1.2 and 2.3 for background); note that among our prop osed tests, only the global signed triangle coun t runs in p olynomial time. Sp ecifically , we show that no p olynomial of degree at most ⌊ (log n/ log(log n )) 2 ⌋ ac hieves weak separation whenever β > 6 γ − 3 α − 3, matching the threshold of the global test; see Theorem 2.9 . W e further show that no signed cycle coun t of length ℓ ≥ 4 improv es up on the triangle coun t, providing additional evidence that the global signed triangle coun t ma y b e the asymptotically optimal efficient test among all signed cycle counts; see Prop osition 2.10 . Computational–statistical gap. Parts (i) and (ii), together with (iv) identify a regime of 6 γ − 3 α − 3 < β < 2 γ − 3 α (the y ellow regions in Figure 2 ), where detection is information- theoretically p ossible yet no efficient algorithm is kno wn. Interestingly , for the full mo del G ( n, p, d ) (i.e., k = n without lo calit y), a computational–statistical gap is not kno wn and conjecturally do es not exist [ LMSY22 ]. The gap here th us app ears to b e a consequence of the lo cal nature of the plan ted geometric structure: the hidden communit y ma y b e placed at exp onen tially many p ossible lo cations, in tro ducing a combinatorial searc h barrier for efficient algorithms. 1.2 Related literature W e review several lines of researc h that are closely related to our w ork. High-dimensional random geometric graphs. A classical line of work studied random geo- metric graphs for fixed dimension d ; see [ Pen03 ] for an ov erview. The study of random graphs with high-dimensional (i.e., d → ∞ as n → ∞ ) geometry w as initiated b y [ DGLU11 ], where the authors studied the clique num b er of G ( n, p, d ) and show ed that for d ≥ exp( e Ω( n 2 )), the graph is indistin- guishable from G ( n, p ). Ever since, there has b een a gro wing line of work on random geometric graphs in high dimensions, inv estigating a v ariety of algorithmic and statistical phenomena. F or the detection b et w een G ( n, p, d ) and G ( n, p ), the breakthrough work of [ BDER16 ] settled the threshold of d = Θ( n 3 ) for fixed p . That pap er also in tro duced a test that coun ts the n um b er of 4 signed triangles (see Section 3 for details), whic h attains the best kno wn upp er b ound of d = e o ( n 3 p 3 ) for general p [ LMSY22 ]. Sev eral w orks since then hav e improv ed low er b ounds for the regime of p = o (1). Namely , [ BBN20 ] show ed a low er b ound of d = e Ω( n 3 p ∨ n 7 / 2 p 2 ∨ n ) for p = e Ω(1 /n 2 ). This w as later improv ed in [ LMSY22 ], which is the state-of-the-art result: d = e Ω( n 3 p 2 ) for p = Ω(1 /n ), and d = Ω((log n ) 36 ) for p = Θ(1 /n ). Notably , it is an op en problem to reduce the gap of polynomial factor p b et ween the upper and lo w er b ounds. Besides detection, G ( n, p, d ) ha ve receiv ed increasing atten tion in recent years, in terms of its sp ectral prop ert y [ LMSY23 , ABI24 , CZ25 ], lo w-degree moments [ BB24b ], coupling with G ( n, p ) [ LMSY22 , BB25b ], latent estimation [ MZ24 ], and rare even ts [ DL W25 ], to name a few. F ur- thermore, there has b een activ e research on mo dels that are different from but closely related to G ( n, p, d ), where the difference lies in v arious factors suc h as edge connection rule [ LR23a , LR23b , MWX26 ], metric of the latent geometry [ BB24a , BGPS25 ], isotropy [ EM20 , BBH24 ], ho- mogeneit y [ BKL19 ], cluster structure [ LS23 ], and com binations thereof. F or further discussion on high-dimensional random geometric graphs, we refer readers to a recen t survey [ DDC23 ]. Plan ted subgraphs. Our mo del can be viewed as a particular case within a class of random graphs kno wn as planted subgraphs. In general, these can b e generated by first drawing a bac k- ground Erd˝ os–R ´ en yi graph G ∼ G ( n, p ) and indep enden tly a subgraph H ov er the complete graph from another distribution. F or v ertex set S of H , the final graph is then obtained by either re- placing the induced subgraph G [ S ] with H , or taking the union G ∪ H . Plan ted subgraphs can b e considered as graph (binary) versions of spik ed random matrices [ Joh01 , BBAP05 ], whic h are fundamen tal ob jects in probability theory and statistics. Within the v ast landscap e of random graph mo dels with communit y structures, many planted subgraphs can b e characterized with the existence of a single comm unit y . The literature on mo dels with multiple communities (e.g., the sto c hastic blo c k mo del [ HLL83 ]) is extensive and merits a separate discussion; here w e fo cus on the single comm unit y case. An iconic example of plan ted subgraphs is the planted clique [ Jer92 , Kuˇ c95 ], where a clique (i.e., a complete graph) of small size is hidden within a graph from G ( n, 1 / 2). This simple model is w ell-kno wn for exhibiting a computational–statistical gap, with v ast connections across theoretical computer science [ JP00 , HK11 ] and high-dimensional statistics [ BR13 , BB20 ]. The literature has since b een expanding, with v arious choices for the plan ted subgraph suc h as a dense subgraph [ A CV14 , HWX15 , V AC15 ], a tree [ MST19 ], a cycle [ BDT + 20 , GSXY25 ], a matc hing [ MMX21 , D WXY23 , WM25 , ABAL + 26 ], to name a few. Besides subgraph-specific results, a recent line of w ork [ Hul22 , EH25 , LPRZ25 , MNWS + 25 , YZZ25 ] aims to provide a unified theory for general subgraphs. Signals b ey ond mean. A common feature in plan ted subgraphs is that the signal exhibits at the level of mean. F or example, in plan ted dense subgraph [ ACV14 ] the edge density is higher on a verage within the communit y than the rest of the graph. In other words, the signal already exists at the low est p ossible lev el (the first moment), and often there is no need to consider an y in teraction (e.g., higher-order moments) b et w een the inputs. As a result, it is often the case that if properly done, thresholding the mean suffices. This is not the case for our mo del, as each vertex marginally has the same distribution. A few pap ers hav e studied settings where the hidden signals are not observed at the mean level. F or example, [ ACBL12 , ACBL15 , ACBL V18 ] studied detection problems where among samples of mean 0, only a small unkno wn subset has dep endence within, such as p ositiv e correlation or Mark o vian structure. Another notable recen t pap er [ KSWY25 ] extensiv ely analyzed a new directed 5 random graph mo del, where a small unknown subset of vertices ha v e latent ranking. Betw een the rank ed vertices in that mo del, a directed edge from a v ertex of higher rank to a v ertex of lo w er rank is more lik ely to b e added, compared to the other direction. As the o verall edge densit y is the same ov er the whole graph, there is no signal at the mean lev el; in particular, the mo del is equiv alen t to G ( n, p ) if the direction is ignored. As a result, the detection is done b y considering the un usual consistency of p airwise orderings, rather than the edge density . 1 Random graphs with geometry-based comm unities. In recen t y ears, v arious random graph mo dels with b oth laten t geometry and communit y structures hav e b een studied. Often the com- m unit y structures in those mo dels are in the style of the sto c hastic blo c k model, consisting of m ultiple comm unities: examples include the geometric blo c k mo del [ GMPS18 , GMPS23 ], the geo- metric SBM [ ABS21 , GNW24 , GJ25 ], the geometric hidden comm unit y mo del [ GGNW24 , GJ26 ], and differen t v ariants thereof [ PP20 , ABD21 , AKL24 ]. Our mo del differs from those in that it has a single hidden communit y rather than m ultiple. One notable exception is the planted dense cycle [ MWZ23 , MWZ25 ], a latent-based mo del where signed triangle coun t is also used for detection; ho w ev er, in terms of the mo deling comp onen ts this model is also fundamentally distinct from ours. W e highlight t wo models in the literature that share certain common features with our mo del. In the mo del introduced in [ BBCvdH20 ], a small communit y made of an Erd˝ os–R ´ enyi graph is hidden in a larger random geometric graph. Hence, at a conceptual lev el our mo del can b e view ed as an inv erted version of theirs, where the roles of comm unit y and non-comm unit y are flipp ed. In another mo del introduced in [ BMS25 ], edges within a hidden comm unity are affected by its laten t geometry , whereas edges outside are formed indep enden tly . Thus, in principle w e combine the communit y structure and the latent geometry in the same wa y . Despite those similarities, the mathematical details of those mo dels are quite different from ours and hence our results cannot b e directly compared to theirs. Moreo v er, we quan titativ ely characterize how high dimensionality in the geometry affects the graph, whereas the results in b oth of those works are either indep enden t of d or for fixed d . Lo w-degree p olynomial framework. Man y high-dimensional statistical models exhibit a phe- nomenon known as computational–statistical gap, where in certain parameter regimes a task is information-theoretically feasible but app ears to lack an y p olynomial-time algorithm. A prominent approac h for analyzing this phenomenon is the low-degree p olynomial framework [ Hop18 ], which studies algorithms expressible as lo w-degree polynomials of the input. F or input dimension n , one considers p olynomials of degree at most D ; the guiding heuristic is that D = O (log n ) often matc hes the p o w er of p olynomial-time algorithms for man y av erage-case problems. This heuristic is supp orted b y many examples, as p olynomials of degree O (log n ) can implement or approximate v arious efficien t algorithms including spectral methods, subgraph-counting pro cedures, and appro x- imate message passing (see [ W ei25 , Section 6.2]). Accordingly , hardness at degree D = ω (log n ) is widely regarded as evidence of computational hardness b ey ond p olynomial time. F or h yp othesis testing, the low-degree p olynomial framew ork examines whether lo w-degree p olynomials can achiev e sep ar ation betw een the null and the alternativ e distributions (see Defi- nition 2.8 ). In practice, this is often analyzed via the low-degree lik eliho od ratio, i.e., the norm of the pro jection of the lik eliho od ratio onto the space of p olynomials of degree at most D ; see, e.g., [ KWB22 ] for details. Understanding the rigorous implications of this criterion has recently 1 W e men tion that despite the apparen t differences betw een the models, in terestingly , our analysis shares certain k ey tec hnical results with theirs (e.g., Lemma 5.4 ). 6 attracted significant attention and is an activ e area of research [ HW21 , BHJK25 , HKK + 26 , JV26 ]; w e refer to a recent surv ey [ W ei25 ] for a further discussion. 1.3 Notations W e denote [ n ] := { 1 , . . . , n } , and [ n ] k to b e the set of all size- k subsets of [ n ]. F or graph H , V ( H ) and E ( H ) resp ectiv ely denote the set of its vertices and edges; v ( H ) and e ( H ) denote their resp ectiv e cardinalities. K n denotes the complete graph on [ n ]. W e use S d − 1 to denote the unit sphere in R d , and U ( S d − 1 ) to denote the uniform distribution o v er S d − 1 (i.e., the Haar measure); throughout, U i i . i . d . ∼ U ( S d − 1 ) for i ∈ [ n ]. F or symmetric matrix A , ∥ A ∥ op denotes its operator norm. All logarithms are with base exp(1), and log a b denotes (log b ) a . F or asymptotics, we alw ays assume n → ∞ with k = k ( n ) → ∞ , and d to b e sufficien tly large. W e use standard big- O notation, where for any a n , b n , a n = O ( b n ) and a n ≲ b n denote a n ≤ C b n for some absolute constan t C > 0; a n = Ω( b n ) and a n ≳ b n denote b n = O ( a n ); a n = Θ( b n ) denotes a n = O ( b n ) and a n = Ω( b n ). Also, a n = o ( b n ) and a n ≪ b n denote lim n →∞ ( a n /b n ) = 0; a n = ω ( b n ) and a n ≫ b n denote b n = o ( a n ). F or each of those w e use e O , e Ω , e Θ , e o, e ω to hide p olylog( n ) factors. 2 Main results In this section, w e presen t the information-theoretic upp er and lo w er b ounds, and the computational lo w er bound for the detection problem. Throughout this section, w e assume p ≤ 1 / 2; for an y fixed p ∈ (1 / 2 , 1), it can b e readily deduced (e.g., follo wing [ BDER16 , Lemmas 3 & 4]) that our detection threshold for fixed p ∈ (0 , 1 / 2] extends. 2.1 Information-theoretic upp er b ound W e present three differen t tests for the detection b et ween P and Q . First, we consider the glob al test for counting signed triangles, whose test statistic is defined as f tri ( G ) := X i 0 such that if 1 k ≤ p ≤ 1 2 and C 2 . 1 ∨ (5 log (1 /p )) 4 ≤ d ≪ k 6 p 3 n 3 log 3 (1 /p ) , the testing err or satisfies P G ∼Q ( f tri ( G ) > γ tri ) + P G ∼P ( f tri ( G ) ≤ γ tri ) = o (1) , wher e the thr eshold is chosen as 2 γ tri := 1 2 E G ∼P [ f tri ( G )] = 1 2 n 3 k n 3 E G ∼G ( n,p,d ) [( G 12 − p )( G 23 − p )( G 13 − p )] . 2 The constant factor of 1 / 2 in fron t of γ tri is arbitrary and can be replaced with an y fixed constant in (0 , 1). This also applies to the thresholds in the scan test and the constrained scan test. The equalit y b et ween expressions in E G ∼P and E G ∼G ( n,p,d ) follo ws from Lemma 4.1 . 7 In the global test, w e essen tially compare the signed triangle coun t within the communit y with the fluctuation of the signed triangle coun t ov er the entire graph. This fluctuation can b e quite large, in particular when n is muc h larger than k . It is thus natural to consider the sc an test , where w e instead consider the individual fluctuations of subgraphs of similar size. In particular, let f scan ( G ) := max A ⊆ [ n ] , | A | = k − X i 0 such that if p ≤ 1 2 , k ≥ C 2 . 2 log 2 n and C 2 . 2 ∨ (5 log (1 /p )) 4 ≤ d ≤ k 2 p 6 log 6 (1 /p ) C 2 . 2 log n , the testing err or satisfies P G ∼Q ( f scan ( G ) > γ scan ) + P G ∼P ( f scan ( G ) ≤ γ scan ) = o (1) , (2.3) wher e the thr eshold is chosen as γ scan := 1 2 k − 3 E G ∼G ( n,p,d ) [( G 12 − p )( G 23 − p )( G 13 − p )] . (2.4) As we will see later, the global test and the scan test are sufficient for an y fixed p in that there exists a matching lo wer bound (up to a logarithmic factor). How ev er, the detection threshold pro vided b y the scan test quickly degrades as p → 0. T o impro ve upon this, we add certain constrain ts on top of the scan test, which w e call the c onstr aine d sc an test . T o b e sp ecific, among the subgraphs of size ≈ k , we only consider those that satisfy additional conditions on (signed) w edge coun ts. F ormally , let e f scan ( G ) := max A ∈C ( G ) , | A | = k − X i 0 such that d ≥ n δ , n − 1+ δ ≤ p ≤ 1 / 2 . Then ther e exists a c onstant C 2 . 3 = C 2 . 3 ( δ ) > 0 such that if d ≤ 1 C 2 . 3 k 2 p 3 log 3 (1 /p ) (log 2 n )(log 2 k ) , ( 2.3 ) holds with e f scan ( G ) in plac e of f scan ( G ) , that is, P G ∼Q e f scan ( G ) > γ scan + P G ∼P e f scan ( G ) ≤ γ scan = o (1) . 8 Remark 2.4 (Comparison b et w een tests) . As note d e arlier, the glob al test (The or em 2.1 ) and the sc an test (The or em 2.2 ) to gether suffic e for char acterizing the dete ction thr eshold for any fixe d p , up to a lo garithmic factor. In terms of the p erformanc e guar ante es fr om the the or ems, the glob al test is b etter if k ≫ ( n 3 / log n ) 1 / 4 , wher e as the sc an test is b etter if k ≪ ( n 3 / log n ) 1 / 4 . When p = o (1) , the c onstr aine d sc an test (The or em 2.3 ) is b etter than the sc an test exc ept for a very limite d r e gime. In fact, it dir e ctly fol lows fr om our analysis that for p = O ((log n ) − 1 (log 2 k ) − 1 ) , the c onstr aine d sc an test suc c e e ds if d = O ( k 2 p 3 log 3 (1 /p ) / log n ) , strictly impr oving the sc an test; se e ( 4.8 ) and the surr ounding ar guments ther e. As in the dense c ase, whether the glob al test or the c onstr aine d sc an test is guar ante e d for a b etter p erformanc e dep ends on how k c omp ar es to e Θ( n 3 / 4 ) . 2.2 Information-theoretic lo wer b ound W e presen t differen t thresholds for the impossibility of detection, based on t wo differen t approac hes. First, we focus on capturing the dep endence on k . F or this, we consider calculating the truncated second momen t b et ween certain random matrices that generate the random graphs. Theorem 2.5 (Lo w er b ound via truncated second momen t) . Ther e exists a c onstant C 2 . 5 > 0 such that the fol lowing holds: if k ≤ n 5 , d ≥ C 2 . 5 log(1 /p ) and d ≫ k 2 ∨ k 6 n 3 , no test achieves we ak dete ction. 3 By com bining this lo wer b ound with the upp er b ounds (Theorems 2.1 and 2.2 ), one can conclude that for an y fixed p the detection threshold is given as d = e Θ k 2 ∨ k 6 n 3 . On the other hand, the threshold in Theorem 2.5 essen tially has no dependence on p . A common k ey feature in recen t works [ BBN20 , LMSY22 , LR23b ] that consider p = o (1) is to leverage the tensorization prop ert y (i.e., chain rule) of KL divergence, which allo ws “local” comparison b etw een the m odels; for further details, see the tec hnical o verview in Section 3 . Our next result refines suc h approac hes for our setting, which in addition has a comm unity structure. Theorem 2.6 (Lo w er b ound via tensorization) . Ther e exists a c onstant C 2 . 6 > 0 such that the fol lowing holds: if C 2 . 6 log n k ≤ p ≤ 1 2 and d ≥ C 2 . 6 k 2 p 2 ∨ k 4 p 2 n log 2 ( k /p ) log 2 (1 /p ) log 3 n , no test achieves we ak dete ction. In terms of the dep endence on p we obtain a p olynomial factor of p 2 for the threshold, whic h matc hes and extends (by considering k = n ) the state-of-the-art results of d = e Ω( n 3 p 2 ) [ LMSY22 , BGPS25 ]. Remark 2.7 (Comparison betw een lo wer bounds) . F or lower b ounds, we fo cus on the r e gime of p ≥ e O (1 /k ) ; for the sp arse r e gime p = Θ(1 /k ) , d TV ( P , Q ) = o (1) alr e ady holds for d = Ω(polylog ( k )) 3 If k > n/ 5, no test ac hieves weak detection if d ≫ k 3 = Θ( n 3 ) ev en when the communit y lo cation is known. 9 [ LMSY22 ]. We cho ose not to pursue the c ase of p = o (1 /k ) , as the aver age de gr e e within the c ommunity is alr e ady o (1) ther e. The or em 2.6 do es not strictly extend The or em 2.5 , in terms of its dep endenc e on k /n . Inde e d, it c an b e che cke d that dep ending on the size of k , The or em 2.5 c overs a wider r e gime: sp e cific al ly, when n 1 / 2 ≤ k = e O ( n 3 / 4 ) and p = e Ω( √ n/k ) , or k = e Ω( n 3 / 4 ) and p = e Ω( k /n ) . This mainly c omes fr om the differ enc es in their underlying appr o aches; se e Se ction 3 for a detaile d discussion. In brief, the pr o of of The or em 2.5 essential ly pr o c e e ds by b ounding TV distanc e with χ 2 diver genc e, which se ems to b e essential for c apturing the tight dep endenc e on the c ommunity size. This c annot b e dir e ctly adapte d to the pr o of of The or em 2.6 : that c omes at the c ost of losing the chain-rule structur e of KL diver genc e, which is essential for al l existing appr o aches that c aptur e dep endenc e on p . We b elieve that impr oving the dep endenc e on k /n for p = o (1) would r e quir e substantial ly new ide as, which we le ave as an op en question. 2.3 Computational lo wer b ound While the global signed triangle coun t can clearly b e calculated in p olynomial time, the scan-based tests in general seem to require sup erp olynomial time as brute-force algorithms. This suggests the existence of a computational–statistical gap for our detection problem; we claim that this is indeed the case. Our analysis is based on the lo w-degree p olynomial framework [ Hop18 , KWB22 , W ei25 ], which considers the follo wing criterion for p olynomials as test statistics. Definition 2.8. L et f b e a p olynomial. A test statistic f ( G ) achieves (a) strong separation if E G ∼P [ f ( G )] − E G ∼Q [ f ( G )] = ω p V ar G ∼Q [ f ( G )] ∨ p V ar G ∼P [ f ( G )] ; (b) w eak separation if E G ∼P [ f ( G )] − E G ∼Q [ f ( G )] = Ω p V ar G ∼Q [ f ( G )] ∨ p V ar G ∼P [ f ( G )] . In the lo w-degree p olynomial framew ork, a negativ e result for this criterion with degree ω (log n ) serv es as evidence that no p olynomial-time algorithms exist (for bac kground, see Section 1.2 ). Recall from Theorem 2.1 that detection can be done efficien tly for d = e o ( k 6 p 3 /n 3 ). The following result complements this, sho wing that no lo w-degree p olynomial can significantly improv e that threshold ev en b y weak separation. Theorem 2.9 (Lo w-degree low er b ound) . Assume that ther e exists a c onstant δ > 0 such that d ≥ n δ , n − 1+ δ ≤ p ≤ 1 / 2 . If ther e exists any c onstant ε > 0 such that d ≥ k 6 n 3 − ε p 3 , no de gr e e- ⌊ (log n/ log (log n )) 2 ⌋ p olynomial achieves we ak sep ar ation. A related question is whether there are efficien t algorithms other than the global signed triangle coun t. A natural extension of the signed triangle coun t is the class of signed cycle coun ts, frequently app earing in latent geometry detection [ BB24a , BB25a ]. In the following prop osition, we provide a negative answer, sho wing that any longer cycle coun t is strictly less p o w erful than the triangle coun t. Prop osition 2.10 (Suboptimality of longer cycle counts) . L et ℓ ≥ 3 and d b e sufficiently lar ge with d ≥ (5 log (1 /p )) 4 . If the glob al signe d c ount of length- ℓ cycle achieves str ong sep ar ation, then d ≪ k 2 p log(1 /p ) n ℓ/ ( ℓ − 2) . 10 In this prop osition, the signed triangle count succeeds for the largest range of d , as the right hand side is maximized at ℓ = 3. This suggests that the global signed triangle coun t may b e the asymptotically optimal efficien t test. 3 T ec hnical ov erview Information-theoretic upp er b ound. A k ey feature of random geometric graphs is homophily: adjacen t v ertices share similar latent v ectors, making their common neigh bors more likely to b e adjacen t as w ell. As a result, geometric graphs con tain more triangles than an Erd˝ os–R ´ enyi graph with the same edge density . Our test statistics are based on the signed triangle coun t P i 0 such that for al l sufficiently lar ge d and 0 < p ≤ 1 / 2 , E G ∼G ( n,p,d ) [( G 12 − p )( G 23 − p )( G 13 − p )] ≥ p 3 log 3 / 2 (1 /p ) C 4 . 3 √ d . 4.1 Global test In this subsection, w e inv estigate the global test, proving Theorem 2.1 . Recall the definition of f tri ( G ) = P i γ tri ) ≤ V ar G ∼Q [ f tri ( G )] γ 2 tri , where b y Lemmas 4.1 and 4.3 , γ tri = 1 2 E G ∼P [ f tri ( G )] ≥ 1 2 × n 3 k n 3 p 3 log 3 / 2 (1 /p ) C 4 . 3 √ d = Ω k 3 p 3 log 3 / 2 (1 /p ) √ d ! . Th us, V ar G ∼Q [ f tri ( G )] γ 2 tri = O dn 3 k 6 p 3 log 3 (1 /p ) , where the last term is o (1) if d ≪ k 6 p 3 n 3 log 3 (1 /p ). T yp e I I error. Similar to the type I error, from 2 γ tri = E G ∼P [ f tri ( G )] w e ha ve P G ∼P ( f tri ( G ) ≤ γ tri ) = P G ∼P ( f tri ( G ) − E G ∼P [ f tri ( G )] ≤ − γ tri ) ≤ V ar G ∼P [ f tri ( G )] γ 2 tri . Th us, it suffices to control the v ariance of the global signed triangle coun t under P . W e state this as a lemma, as it will b e used elsewhere. Lemma 4.4. If 1 /k ≤ p ≤ 1 / 2 and d is sufficiently lar ge with (5 log (1 /p )) 4 ≤ d ≪ k 6 p 3 log 3 (1 /p ) /n 3 , then γ tri ≫ p V ar G ∼P [ f tri ( G )] . The pro of of Lemma 4.4 is deferred to App endix B.1 . By the lemma, the type I I error is o (1) and this completes the pro of. 4.2 Scan test Here, w e analyze the p erformance of the scan test and pro ve Theorem 2.2 . T yp e I error. F or A ⊆ [ n ], let f A ( G ) := P i γ scan ) = P G ∼Q max A ∈ ( [ n ] k − ) f A ( G ) > γ scan ≤ n k − P G ∼Q f [ k − ] ( G ) > γ scan ≤ n k − · 2 exp − 1 C A. 1 γ 2 scan log 3 (1 /p ) ( k − ) 3 ∧ γ scan log 3 / 2 (1 /p ) √ k − ∧ γ 2 / 3 scan log(1 /p ) !! ≤ exp k log n − Ω k 3 p 6 log 6 (1 /p ) d ∧ k 5 / 2 p 3 log 3 (1 /p ) √ d ∧ k 2 p 2 log 2 (1 /p ) d 1 / 3 !! ≤ exp k log n − Ω k 3 p 6 log 6 (1 /p ) d ∧ k 2 p 2 log 2 (1 /p ) d 1 / 3 , where the first inequality holds by the union b ound, the second inequalit y holds by Lemma A.1 , the third inequality holds b y Lemma 4.3 , and the last inequality holds b y d ≤ k 3 p 6 log 6 (1 /p ) from the assumption. 15 • If d ≥ k 3 / 2 p 6 log 6 (1 /p ), the first term k 3 p 6 log 6 (1 /p ) d is the minimum. Then P G ∼Q ( f scan ( G ) > γ scan ) ≤ exp( − k log n ) = o (1) if d ≤ k 2 p 6 log 6 (1 /p ) C 0 log n , b y c ho osing a sufficien tly large C 0 > 0. • If d < k 3 / 2 p 6 log 6 (1 /p ), the second term k 2 p 2 log 2 (1 /p ) d 1 / 3 is the minimum. Then P G ∼Q ( f scan ( G ) > γ scan ) ≤ exp( − k log n ) = o (1) if d ≤ k 3 p 6 log 6 (1 /p ) C 1 log 3 n , by c ho osing a sufficien tly large C 1 > 0. This is implied b y the preceding inequality giv en k ≥ C 2 . 2 log 2 n , for an y constant C 2 . 2 > C 1 /C 0 . Th us, an y choice of C 2 . 2 > ( C 1 /C 0 ) ∨ C 0 ∨ C 1 suffices for P G ∼Q ( f scan ( G ) > γ scan ) = o (1). T yp e I I error. By ( 4.3 ) with ev ent E = { f scan ( G ) ≤ γ scan } , it suffices to show that max s ∈ [ k − ,k + ] P G ∼P ′ s max A ∈ ( [ n ] k − ) f A ( G ) ≤ γ scan = o (1) , where P ′ s is a mixture of P S with S chosen uniformly ov er size- s sets. F or an y suc h S , there exists a subset S 0 ⊆ S of size exactly k − . Consider any deterministic rule for c ho osing such S 0 (e.g., the smallest k − elemen ts of S ). Since the maximum o ver all subsets is at least the v alue on this sp ecific S 0 , w e ha ve max A ∈ ( [ n ] k − ) f A ( G ) ≥ f S 0 ( G ). Th us, max s ∈ [ k − ,k + ] P G ∼P ′ s ( E ) ≤ max | S |∈ [ k − ,k + ] P G ∼P S ( f S 0 ( G ) ≤ γ scan ) = max | S |∈ [ k − ,k + ] P G ∼P S ( f S 0 ( G ) ≤ E G ∼P S [ f S 0 ( G )] − γ scan ) ≤ V ar G ∼P S 0 [ f S 0 ( G )] γ 2 scan , (4.4) from E G ∼P S [ f S 0 ( G )] = 2 γ scan and Chebyshev’s inequality . F or the last term of ( 4.4 ) being o (1), we apply Lemma 4.4 to f S 0 b y treating G [ S 0 ] as a stand-alone graph of size k − with a full comm unity . The required conditions of Lemma 4.4 hold b y the assumption of the th eorem. The lo wer bound on d clearly follows. The condition p ≥ 1 /k − follo ws from 1 ≤ d = O ( k 2 p 6 log 6 (1 /p ) / log n ) ≤ O ( k 2 p 2 / log n ) which implies p = Ω( √ log n/k ); the condition d ≪ ( k − ) 3 p 3 log 3 (1 /p ) follo ws from k ≫ 1 / log n = Ω( p 3 log 3 (1 /p ) / log n ) which implies d = O ( k 2 p 6 log 6 (1 /p ) / log n ) ≪ k 3 p 3 log 3 (1 /p ). 4.3 Constrained scan test Finally , we consider the constrained scan test and prov e Theorem 2.3 . Recall (from the previous subsection) the notation f A ( G ) = P i γ scan ≤ n k − P G ∼Q f [ k − ] ( G ) > γ scan , X i γ scan ≤ exp k log n − γ 2 scan 4 v ∧ γ scan 2 B ≤ exp k log n − Ω k 3 p 3 log 3 (1 /p ) d ∧ k 2 p log(1 /p ) ∧ k 2 p log 3 / 2 (1 /p ) √ d log k ∧ k 3 p 3 log 3 / 2 (1 /p ) √ d log k !! . This term is o (1), by a prop er c hoice of constant C 0 > 0 suc h that the follo wing holds: d ≤ 1 C 0 k 2 p 3 log 3 (1 /p ) log n ∧ k 2 p 2 log 3 (1 /p ) (log 2 n )(log 2 k ) ∧ k 4 p 6 log 3 (1 /p ) (log 2 n )(log 2 k ) , (4.8) k p log (1 /p ) ≥ C 0 log n . (4.9) If d ≤ k 2 p 3 log 3 (1 /p ) / ( C 0 (log 2 n )(log 2 k )), from n δ ≤ d and 1 /p ≤ n 1 − δ w e hav e k 2 p 3 ≥ C 0 n δ log 2 k / ((1 − δ ) log n ), which is larger than (log n )(log 2 k ) for all sufficien tly large n . F or ( 4.8 ), this implies that the third term cannot b e minimum, and an y choice of C 2 . 3 > C 0 suffices. F or ( 4.9 ), w e hav e k 3 p 3 log 3 (1 /p ) ≥ k 2 p 3 log 3 (1 /p ) ≥ C 0 n δ (log 2 n )(log 2 k ), where an y c hoice of C 2 . 3 > C 1 / 3 0 suffices for all sufficien tly large n . Remark 4.6 (Role of the constraints) . We note that such c onstr aints may b e ne c essary, as the sub optimality of the unc onstr aine d sc an test (The or em 2.2 ) se ems to b e inher ent. Her e we pr ovide an explanation; as c ontext, we r efer to the pr o of of The or em 2.2 . Ther e, for the err or to vanish under Q , the event of signe d triangle c ount b eing lar ger than t = e Θ( k 3 p 3 / √ d ) should happ en with very smal l pr ob ability—at most 1 / n k − = exp( − e Ω( k )) . However, this event c an b e attaine d if a clique of size t 1 / 3 exists, which happ ens with pr ob ability at le ast exp( − e O ( t 2 / 3 )) = exp( − e O ( k 2 p 2 /d 1 / 3 )) (also c onsistent with the lar ge-deviation typ e sc aling of the event). Combine d, this r e quir es d = e O ( k 3 p 6 ) , 18 which is strictly worse than the thr eshold d = e O ( k 2 p 3 ) we obtain for the c onstr aine d sc an test when p = e o (1 /k 1 / 3 ) . In this sense, the c onstr aints c an b e c onsider e d as pr eventing events that ar e b ad for c onc entr a- tion. F or example, it c an b e che cke d that for p = e o (1 /k 1 / 3 ) , the size- t 1 / 3 clique implies that the left hand side of ( 2.7 ) is at le ast Ω( t 1 / 3 ) , violating the c orr esp onding c ondition when d = e O ( k 2 p 3 ) . 5 Pro ofs for information-theoretic lo w er b ound 5.1 T runcated second momen t Our first approac h is to view both P and Q as generated b y thresholding certain random matrices. This essen tially reduces the detection problem b et w een t w o (binary-v alued) r andom gr aphs to a detection problem b et ween t w o (real-v alued) r andom matric es [ BDER16 ]. Similar to ( 4.3 ), w e b egin with d TV ( P , Q ) = d TV ( E s ∼ Binom( n,k/n ) [ P ′ s ] , Q ) ≤ E s ∼ Binom( n,k/n ) [ d TV ( P ′ s , Q )] ≤ P s ∼ Binom( n,k/n ) ( s / ∈ [ k − , k + ]) + max s ∈ [ k − ,k + ] d TV ( P ′ s , Q ) ≤ 2 exp( − Ω( k )) + max s ∈ [ k − ,k + ] d TV ( P ′ s , Q ) , where the first inequalit y is by Jensen inequality , the second inequality is b y d TV ≤ 1, and the last inequalit y is b y Chernoff b ound. Th us, it suffices to show that the TV distance v anishes uniformly o v er s ∈ [ k − , k + ]. F rom random graphs to random matrices. No w w e consider the random matrices from whic h P ′ s and Q are generated. F or Q , let M ∼ dI n + √ d GOE( n ), i.e., for an y i, j ∈ [ n ] with i ≤ j , M ij ind. ∼ d 1 { i = j } + √ d N (0 , 1 + 1 { i = j } ) , and M j i = M ij . Also, define the map α : R n ( n +1) / 2 → { 0 , 1 } n ( n − 1) / 2 whic h thresholds the off- diagonal en tries of a symmetric matrix X as follows: α ( X ) ij := 1 { X ij ≥ √ d Φ − 1 (1 − p ) } , for all i < j ∈ [ n ] , where Φ is the cumulativ e distribution function of N (0 , 1). Then we ha ve α ( M ) ∼ Q = G ( n, p ) , b ecause for α ( M ), each edge is drawn indep enden tly with probability p . F or P , the random matrix should follo w differen t distributions dep ending on the communit y membership. F or S ⊆ [ n ], define a symmetric random matrix W S ∈ R n × n whose en tries are given as ( W S ) ij := ( W ij i, j ∈ S M ij else , where W ∼ Wishart( n, d ), i.e., for any i, j ∈ [ n ], W ij = ⟨ Z i , Z j ⟩ , 19 where Z i i.i.d. ∼ N (0 , I d ) for i ∈ [ n ]. The edge ij within the comm unity of P is then realized by thresh- olding W ij / p W ii W j j = ⟨ Z i / ∥ Z i ∥ , Z j / ∥ Z j ∥⟩ . In particular, define β : R n ( n +1) / 2 → { 0 , 1 } n ( n − 1) / 2 as β ( X ) ij := 1 n X ij / p X ii X j j > τ ( p, d ) o , for all i < j ∈ [ n ] . T o generate a sample from P , β should b e used for edges within the communit y , and α should b e used otherwise. F ormally , by defining a map β S : R n ( n +1) / 2 → { 0 , 1 } n ( n − 1) / 2 suc h that β S ( X ) ij = β ( X ) ij 1 { i, j ∈ S } + α ( X ) ij 1 { i / ∈ S or j / ∈ S } , w e ha ve β S ( W S ) ∼ P S . In this sense, with a sligh t o verload of notation, P ′ s can be written as P ′ s = E S | S | = s [ β S ( W S )], which is a mixture distribution. Then d TV ( P ′ s , Q ) = d TV E S | S | = s [ β S ( W S )] , α ( M ) ≤ d TV E S | S | = s [ β S ( W S )] , E S | S | = s [ α ( W S )] + d TV E S | S | = s [ α ( W S )] , α ( M ) ≤ d TV E S | S | = s [ β S ( W S )] , E S | S | = s [ α ( W S )] | {z } (I) + d TV E S | S | = s [ W S ] , M | {z } (II) , (5.1) where the last inequality is b y data processing inequality applied to the map α , after observing that the distribution of E S | S | = s [ α ( W S )] (mixture of pushforw ard) is equal to α E S | S | = s [ W S ] (pushforw ard of mixture). F or the rest of the pro of, w e sho w that b oth (I) and (I I) v anish uniformly ov er s ∈ [ k − , k + ]. First term (I). By conv exity (and Jensen’s inequalit y) and symmetry , (I) in ( 5.1 ) is at most d TV β S ( W S ) , α ( W S ) = d TV ( β [ s ] ( W [ s ] ) ij ) i τ ( p, d ) i Φ − 1 (1 − p ) √ d i τ ( p, d ) i Φ − 1 (1 − p ) √ d i Φ − 1 (1 − p ) √ d i Φ − 1 (1 − p ) √ d i 0, assuming that Φ − 1 (1 − p ) / √ d is sufficiently small. The last term is at most O ( p log 2 (1 /p ) /d ), from Φ − 1 (1 − p ) ≲ p log(1 /p ) (from P ( N (0 , 1) > x ) ≤ exp( − x 2 / 2) for x > 0), which also implies that d = Ω(log (1 /p )) suffices for the condition on Φ − 1 (1 − p ) / √ d . The second term is the TV distance b et w een Wishart ensemble and “spherical Wishart” en- sem ble (termed in [ PW21 ]), where b oth distributions are non-pro duct and ha v e Gram matrix structures. While one may approac h this by comparing b oth matrices against GOE, that requires d ≫ k 3 [ JL15 , BDER16 ]. By directly comparing the strictly upp er triangular parts of the t w o matrices, w e sho w that they are asymptotically equiv alent when d ≫ k 2 . Prop osition 5.1 (Comparison b et ween Wishart and spherical Wishart) . L et Z i i . i . d . ∼ N (0 , I d ) for i ∈ [ k ] . If d ≫ k 2 and k → ∞ , d TV ⟨ Z i , Z j ⟩ ∥ Z i ∥ ∥ Z j ∥ i 10(1 + p log s ) p dq ≤ s X q =1 2 exp( q log s − (3(1 + p log s ) √ q ) 2 / 2) ≤ s × 2 s − 3 . where the first inequality is from union b ound and symmetry and the second inequalit y is from standard Wishart concen tration [ DS01 , Theorem II.13] with d + 10(1 + √ log s ) √ dq > ( √ d + √ q + 3(1 + √ log s ) √ q ) 2 for all sufficiently large d . Since s = Ω( k ) for s ∈ [ k − , k + ] and k → ∞ , this pro v es ( 5.6 ). F or the second statement ( 5.7 ), let S ′ b e an i.i.d. copy of S . Then, E X ∼ m n,d [ e L s ( X ) 2 ] = E X ∼ m n,d E S | S | = s w s,d ( X S × S ) 1 { X S × S ∈ E s } m s,d ( X S × S ) E S ′ | S ′ | = s w s,d ( X S ′ × S ′ ) 1 { X S ′ × S ′ ∈ E s } m s,d ( X S ′ × S ′ ) = E S,S ′ | S | = | S ′ | = s E X ∼ m n,d w s,d ( X S × S ) 1 { X S × S ∈ E s } w s,d ( X S ′ × S ′ ) 1 { X S ′ × S ′ ∈ E s } m s,d ( X S × S ) m s,d ( X S ′ × S ′ ) ≤ E S,S ′ | S | = | S ′ | = s E X ∼ m n,d w s,d ( X S × S ) w s,d ( X S ′ × S ′ ) 1 { X ( S ∩ S ′ ) × ( S ∩ S ′ ) ∈ E | S ∩ S ′ | } m s,d ( X S × S ) m s,d ( X S ′ × S ′ ) . (5.8) Our next step is to sho w that the inner expectation in ( 5.8 ) only depends on the en tries with indices that ov erlap ov er S and S ′ , i.e., X ( S ∩ S ′ ) × ( S ∩ S ′ ) . F or notational con v enience, let R := S ∩ S ′ and N := | R | . Define the (conditional) densities g , g ′ , h, h ′ of submatrices 7 as follo ws: X S × S \ R × R | X R × R ∼ g , X S ′ × S ′ \ R × R | X R × R ∼ g ′ where X ∼ w n,d , X S × S \ R × R | X R × R ∼ h, X S ′ × S ′ \ R × R | X R × R ∼ h ′ where X ∼ m n,d . 7 Belo w, X S × S \ R × R denotes the entries X ( S \ R ) × ( S \ R ) ∪ X ( S \ R ) × R ∪ X R × ( S \ R ) . 22 Notably , as m s,d is a pro duct distribution, h and h ′ do not dep end on X R × R . Then E X ∼ m n,d w s,d ( X S × S ) w s,d ( X S ′ × S ′ ) 1 { X ( S ∩ S ′ ) × ( S ∩ S ′ ) ∈ E | S ∩ S ′ | } m s,d ( X S × S ) m s,d ( X S ′ × S ′ ) = E X ∼ m n,d " w 2 N ,d ( X R × R ) 1 { X R × R ∈ E N } g ( X S × S \ R × R | X R × R ) g ′ ( X S ′ × S ′ \ R × R | X R × R ) m 2 N ,d ( X R × R ) h ( X S × S \ R × R ) h ′ ( X S ′ × S ′ \ R × R ) # = E X R × R ∼ m N ,d w 2 N ,d ( X R × R ) 1 { X R × R ∈ E N } m 2 N ,d ( X R × R ) × E X S × S \ R × R ∼ h g ( X S × S \ R × R | X R × R ) h ( X S × S \ R × R ) × E X S ′ × S ′ \ R × R ∼ h ′ g ′ ( X S ′ × S ′ \ R × R | X R × R ) h ′ ( X S ′ × S ′ \ R × R ) = E X R × R ∼ m N ,d " w 2 N ,d ( X R × R ) 1 { X R × R ∈ E N } m 2 N ,d ( X R × R ) # , where the first equality is by definition, second equality is from m n,d b eing a pro duct distribution, and the last equality is from g and g ′ b eing densities. Since the last term only dep ends on X R × R , b y simplifying the notation as X ∼ m N ,d , ( 5.8 ) is at most E N | S | = | S ′ | = s " E X ∼ m N ,d " w 2 N ,d ( X ) 1 { X ∈ E N } m 2 N ,d ( X ) ## . (5.9) The next step is to ev aluate the inner exp ectation in ( 5.9 ) with resp ect to X as a function of N and d . This is done b y using T aylor expansion to approximate w 2 N ,d /m 2 N ,d as a simple function of the spectrum of m N ,d , along with a con trol of the en tries from the high probabilit y ev en t ( 5.5 ). As the calculations are at least conceptually similar to those in prior works [ BDER16 , RR19 ], here we fo cus on their implication as presen ted in the follo wing lemma. Lemma 5.3 (Comparison b etw een Wishart and GOE) . L et d ≫ k 2 and k → ∞ . Then ther e exists a c onstant C 5 . 3 > 0 and p ositive r andom variables f 1 ( X ) , f 2 ( X ) , f 3 ( X ) such that w 2 N ,d ( X ) 1 { X ∈ E N } m 2 N ,d ( X ) ≤ (1 + o (1)) f 1 ( X ) f 2 ( X ) f 3 ( X ) , (5.10) wher e e ach f i ( X ) (which dep ends on N , d ) satisfies E X ∼ m N ,d [ f i ( X ) 3 ] ≤ exp C 5 . 3 N 3 d , 1 ≤ i ≤ 3 . Her e, the 1 + o (1) factor in ( 5.10 ) is universal over s ∈ [ k − , k + ] . The pro of is deferred to App endix C.2 . The upp er bounds on f i ( X ) suggest that it suffices to calculate the exp ectation of exp( O ( N 3 /d )) ov er N = | S ∩ S ′ | , conditioned on | S | = | S ′ | = s = Θ( k ). The following lemma shows that this exp ectation is 1 + o (1) under the desired condition d ≫ k 2 ∨ k 6 /n 3 . W e men tion that this result previously app eared in [ KSWY25 , Prop osition 4.3] for a similar goal of establishing detection low er b ound, although in a different mo del. Lemma 5.4 (Upp er b ound on cub ed hypergeometric) . L et C 5 . 4 > 0 b e an arbitr ary c onstant. If k ≤ n/ 5 and d ≫ k 2 ∨ k 6 /n 3 then max s ∈ [ k − ,k + ] E N | S | = | S ′ | = s exp C 5 . 4 N 3 d = 1 + o (1) . 23 The pro of is deferred to Appendix C.3 . F rom ( 5.9 ) and ( 5.10 ), w e obtain max s ∈ [ k − ,k + ] E N | S | = | S ′ | = s " E X ∼ m N ,d " w 2 N ,d ( X ) 1 { X ∈ E N } m 2 N ,d ( X ) ## ≤ (1 + o (1)) max s ∈ [ k − ,k + ] E N | S | = | S ′ | = s [ E X ∼ m N ,d [ f 1 ( X ) f 2 ( X ) f 3 ( X )]] ≤ (1 + o (1)) 3 Y i =1 max s ∈ [ k − ,k + ] E N | S | = | S ′ | = s [ E X ∼ m N ,d [ f i ( X ) 3 ]] 1 / 3 ≤ (1 + o (1)) 3 Y i =1 max s ∈ [ k − ,k + ] E N | S | = | S ′ | = s exp C 5 . 3 N 3 d 1 / 3 ≤ 1 + o (1) , where the second inequalit y is b y H¨ older inequalit y , the third inequalit y is b y Lemma 5.3 , and the last inequalit y is by Lemma 5.4 . This pro v es ( 5.7 ) and completes the pro of of Theorem 2.5 . 5.2 T ensorization of KL divergence In this approach, w e consider a sequential pro cess where at eac h time i = 1 , . . . , n , a new vertex and its edges with resp ect to the previous v ertices are in tro duced. F ormally , let B b e the adjacency matrix of a sample from Q , with the neigh b orhoo d vector B i ∈ { 0 , 1 } i − 1 for i ∈ [ n ] denoting the adjacency b et w een i and vertices j < i . Similarly , w e define A (and similarly A i ∈ { 0 , 1 } i − 1 for i ∈ [ n ]) to b e the adjacency matrix of a sample from P , whic h dep ends on the joint laten t v ector X i := ( U i , V i ) ∈ R d +1 , i ∈ [ n ]. T o b e sp ecific, U i ∼ U ( S d − 1 ) (the feature vector) and V i ∼ Ber( k/n ) (the comm unit y mem b ership indicator) for all i ∈ [ n ] indep enden tly . Note that here we assume every vertex i to ha ve a feature vector U i , and it is the mem b ership indicator V i that determines whether the feature vector w ould b e used. Throughout, w e will use notation such as A [ i ] := ( A 1 , . . . , A i ). Then w e hav e 2 d TV ( P , Q ) 2 = 2 d TV ( A, B ) 2 ≤ d KL ( A || B ) ≤ n − 1 X i =0 E A [ i ] [ d KL ( A i +1 | A [ i ] || B i +1 )] ≤ n − 1 X i =0 E A [ i ] ,X [ i ] [ d KL ( A i +1 | A [ i ] , X [ i ] || B i +1 )] = n − 1 X i =0 E X [ i ] [ d KL ( A i +1 | X [ i ] || B i +1 )] , from Pinsk er’s inequality , chain rule for KL div ergence (plus the indep endence b et w een B i +1 and B [ i ] ), and the con v exit y of KL divergence and the fact that A [ i ] and A i +1 are conditionally inde- p enden t giv en X [ i ] . By the same argumen t as in [ LMSY22 , Claim 8.2], the last term can be further upp er bounded as n − 1 X i =0 E X [ i ] [ d KL ( A i +1 | X [ i ] || B i +1 )] ≤ n E X [ n − 1] [ d KL ( A n | X [ n − 1] || B n )] . 24 Th us, it suffices to show that E X [ n − 1] [ d KL ( A n | X [ n − 1] || B n )] = o 1 n . (5.11) Let P n ( ·| X [ n − 1] ) : { 0 , 1 } n − 1 → [0 , 1] b e the la w of A n | X [ n − 1] and Q n ( · ) : { 0 , 1 } n − 1 → [0 , 1] b e the la w of B n . Then ( 5.11 ) can b e rewritten as E X [ n − 1] [ d KL ( A n | X [ n − 1] || B n )] = E X [ n − 1] E Γ ∼P n ( ·| X [ n − 1] ) log P n (Γ | X [ n − 1] ) Q n (Γ) = E X [ n − 1] h E Γ ∼P n ( ·| X [ n − 1] ) log ∆(Γ , X [ n − 1] ) + 1 i , (5.12) where Γ := (Γ 1 , . . . , Γ n − 1 ) ∈ { 0 , 1 } n − 1 and ∆(Γ , X [ n − 1] ) := P n (Γ | X [ n − 1] ) / Q n (Γ) − 1. Our next argument is that the size of ∆ can b e significantly reduced in t w o wa ys. First, this giv es a smaller ratio b et w een the neighborho o d distributions. This comes from the fact that v ertex n itself may not b e in the communit y ( V n is not revealed yet), in which case the neigh b orhoo d distribution is simply Q n . Indeed, w e can write as P n (Γ | X [ n − 1] ) = k n P n (Γ | X [ n − 1] ) + 1 − k n Q n (Γ) , where P n ( ·| X [ n − 1] ) is the distribution of A n | X [ n − 1] conditioned on V n = 1. Th us, ∆(Γ , X [ n − 1] ) = k n P n (Γ | X [ n − 1] ) Q n (Γ) − 1 ! . (5.13) Second, ∆ is small in that it typically compares neigh b orho ods of size muc h smaller than n . If a previous v ertex is not in the communit y , its edge b et ween v ertex n is Bern( p ), canceling out the corresp onding factor in Q n ; note that such information on the previous vertices is av ailable from the conditioning on X [ n − 1] . This yields a smaller ratio betw een the neigh b orho od distributions. As eac h previous vertex is in the communit y with probabilit y k /n , on av erage, at most O ( k ) vertices are relev an t. In order to capture the av erage-case b eha vior explained so far, w e consider the follo wing even t: { (Γ , U, V ) ∈ E } := n − 1 X i =1 V i ≤ 2 k, X i ∈ [ n − 1]: V i =1 Γ i ≤ 4 kp, | ∆(Γ , X [ n − 1] ) | ≤ k n . Here, U := ( U 1 , . . . , U n − 1 ). The following lemma sho ws that this is indeed a high probability ev en t. Lemma 5.5. Assume p ∈ (0 , 1 / 2] . Then ther e exists a c onstant C 5 . 5 > 0 such that if n is sufficiently lar ge and k p ≥ C 5 . 5 log n and d ≥ C 5 . 5 ( k p log (1 /p ) log ( d/p )) 2 log n , then the fol lowing holds: n log(1 /p ) P X [ n − 1] , Γ ∼P n ( ·| X [ n − 1] ) ((Γ , U, V ) ∈ E c ) = o (1 /n ) , n log(1 /p ) P X [ n − 1] , Γ ∼Q n ((Γ , U, V ) ∈ E c ) = o (1 /n ) . (5.14) 25 The pro of is deferred to Appendix C.4 . Con tinuing from ( 5.12 ), w e ha v e E X [ n − 1] h E Γ ∼P n ( ·| X [ n − 1] ) log ∆(Γ , X [ n − 1] ) + 1 i ≤ o 1 n + E X [ n − 1] h E Γ ∼P n ( ·| X [ n − 1] ) log ∆(Γ , X [ n − 1] ) + 1 1 { (Γ , U, V ) ∈ E } i ≤ o 1 n + E X [ n − 1] E Γ ∼Q n ∆(Γ , X [ n − 1] ) + 1 ∆(Γ , X [ n − 1] ) 1 { (Γ , U, V ) ∈ E } ≤ o 1 n + E X [ n − 1] E Γ ∼Q n ∆(Γ , X [ n − 1] ) 2 1 { (Γ , U, V ) ∈ E } , where the first inequality is from Lemma 5.5 and log (∆ + 1) ≤ n log (1 /p ) from P n ≤ 1 , Q n ≥ p n ; the second inequalit y is from log ( x + 1) ≤ x ; and the third inequalit y is from E X [ n − 1] E Γ ∼Q n ∆(Γ , X [ n − 1] ) 1 { (Γ , U, V ) ∈ E } = | P X [ n − 1] , Γ ∼Q n ((Γ , U, V ) ∈ E c ) − P X [ n − 1] , Γ ∼P n ( ·| X [ n − 1] ) ((Γ , U, V ) ∈ E c ) | = o (1 /n ) , again b y Lemma 5.5 . F or notational conv enience, define ν to b e the num b er of v ertices i ∈ [ n − 1] such that V i = 1, and i 1 < · · · < i ν b e suc h indices. Then ∆(Γ , X [ n − 1] ) = k n e P ν +1 (Γ i 1 , . . . , Γ i ν | U i 1 , . . . , U i ν ) p P ν j =1 Γ i j (1 − p ) ν − P ν j =1 Γ i j − 1 ! , (5.15) where e P l +1 ( ·| U m 1 , . . . , U m l ) denotes the distribution of edges b et ween v ertex n and v ertices m 1 < · · · < m l under G ( l + 1 , p, d ) (ov er vertices m 1 , . . . , m l , n in this case), conditioned on the corre- sp onding laten ts U m 1 , . . . , U m l . Th us, it suffices to show that E X [ n − 1] E Γ ∼Q n ∆(Γ , X [ n − 1] ) 2 1 { (Γ , U, V ) ∈ E } = k n 2 E X [ n − 1] E Γ ∼Q n e P ν +1 (Γ i 1 , . . . , Γ i ν | U i 1 , . . . , U i ν ) p P ν j =1 Γ i j (1 − p ) ν − P ν j =1 Γ i j − 1 ! 2 1 { (Γ , U, V ) ∈ E } , (5.16) is o (1 /n ). F or this, consider an y fixed V and Γ with ν ≤ 2 k and P ν j =1 Γ i j ≤ 4 k p (the first tw o conditions of E ). By only inv oking the randomness of U i 1 , . . . , U i ν , E U i 1 ,...,U i ν e P ν +1 (Γ i 1 , . . . , Γ i ν | U i 1 , . . . , U i ν ) p P ν j =1 Γ i j (1 − p ) ν − P ν j =1 Γ i j − 1 ! 2 1 { (Γ , U, V ) ∈ E } ≤ Z 1 0 P U i 1 ,...,U i ν e P ν +1 (Γ i 1 , . . . , Γ i ν | U i 1 , . . . , U i ν ) p P ν j =1 Γ i j (1 − p ) ν − P ν j =1 Γ i j − 1 ! 2 ≥ t dt ≤ Z 1 / ( k 2 (log n ) /n ) 0 1 dt + Z 1 1 / ( k 2 (log n ) /n ) exp − 1 C A. 4 dt C 0 k p ( kp log(1 /p ) + log ( d/p )) log (1 /p ) log ( d/p ) + C A. 4 log(3 k ) dt ≤ 1 log n n k 2 + C 1 ( k p log (1 /p ) log ( d/p )) 2 d exp − dn C 1 ( k 2 p log(1 /p ) log ( d/p )) 2 log n + C 1 log(3 k ) , 26 for some constants C 0 > 0 and C 1 > 0. The first inequalit y is from | ∆(Γ , X [ n − 1] ) | ≤ k /n (third condition of E ; see ( 5.15 )) and the second inequality is from Lemma A.4 , using ν ≤ 2 k and P ν j =1 Γ i j ≤ 4 k p ; the final inequalit y is from k p log (1 /p ) + log( d/p ) ≤ k p log (1 /p ) log ( d/p ). Th us, ( 5.16 ) is at most 1 n log n + C 1 ( k 2 p log(1 /p ) log ( d/p )) 2 n 2 d exp − dn C 1 ( k 2 p log(1 /p ) log ( d/p )) 2 log n + C 1 log(3 k ) . This is o (1 /n ), as long as d ≥ C 2 k 4 p 2 n log 2 (1 /p ) log 2 ( d/p ) log 2 n , for some constant C 2 > 0. In com bination to Lemma 5.5 , we show ed that for ( 5.11 ) to hold it suffices to ha v e d ≥ ( C 5 . 5 ∨ C 2 ) k 2 p 2 ∨ k 4 p 2 n log 2 ( d/p ) log 2 (1 /p ) log 2 n . This is implied b y d ≥ C 2 . 6 ( k 2 p 2 ∨ k 4 p 2 /n ) log 2 ( k /p ) log 2 (1 /p ) log 3 n , for an appropriate choice of the constan t C 2 . 6 > 0. 6 Pro ofs for computational lo w er b ound 6.1 Lo w-degree low er b ound In this subsection, w e prov e Theorem 2.9 . F or an y subgraph H of K n , define its F ourier co efficien t (with resp ect to the orthonormal basis in L 2 ( Q )) as Φ P ( H ) := E G ∼P Y ij ∈ E ( H ) G ij − p p p (1 − p ) . F rom [ BB24b , Claim 3.1], to sho w that there is no p olynomial of degree at most D ac hieving w eak separation, it suffices to hav e X H ⊆ K n :1 ≤ e ( H ) ≤ D Φ P ( H ) 2 = o (1) . (6.1) No w let D = ⌊ (log n/ log (log n )) 2 ⌋ . Note that for eac h H , there are at most n v ( H ) subgraphs in K n that are isomorphic to H . F urthermore, such subgraphs all share the same v alue of Φ P ( H ). Th us for ( 6.1 ), it suffices to show X non-iso. H ⊆ K n :1 ≤ e ( H ) ≤ D n v ( H ) Φ P ( H ) 2 = o (1) , (6.2) where non-iso. H ⊆ K n denotes the enumeration of all nonisomorphic subgraphs H of K n . F or eac h H , let H 1 , . . . , H r b e its connected comp onen ts. Then Φ P ( H ) = Q r i =1 Φ P ( H i ) and in particular if an y of H i is a tree, Φ P ( H ) = 0 by Corollary 4.2 . Thus for H with Φ P ( H ) = 0, one can assume 27 that v ( H i ) ≥ 3 and e ( H i ) ≥ v ( H i ). Then for each H i , w e ha ve | Φ P ( H i ) | = ( p (1 − p )) − e ( H i ) / 2 E G ∼P Y j ℓ ∈ E ( H i ) ( G j ℓ − p ) ≤ ( p (1 − p )) − e ( H i ) / 2 (8 p ) e ( H i ) C A. 7 (log 6 n )(log 3 / 2 d ) √ d ! ⌈ ( v ( H i ) − 1) / 2 ⌉ k n v ( H i ) ≤ (8 p 2 p ) e ( H i ) C A. 7 (log 6 n )(log 3 / 2 d ) √ d ! v ( H i ) / 3 k n v ( H i ) ≤ 8 e ( H i ) 4 C A. 7 k 3 p 3 / 2 (log 6 n )(log 3 / 2 d ) n 3 √ d ! v ( H i ) / 3 . (6.3) Here, the first inequalit y is from Lemma A.7 with v ( H i ) , e ( H i ) ≤ log 3 n , and Lemma 4.1 ; the second inequalit y is from 1 − p ≥ 1 / 2 and ⌈ ( v ( H i ) − 1) / 2 ⌉ ≥ v ( H i ) / 3; the last inequality is from √ 2 p ≤ 1 and e ( H i ) ≥ v ( H i ). F rom ( 6.3 ), we can bound the left hand side of ( 6.2 ) as X non-iso. H ⊆ K n :1 ≤ e ( H ) ≤ D n v ( H ) Φ P ( H ) 2 ≤ X non-iso. H ⊆ K n :1 ≤ e ( H ) ≤ D 64 e ( H ) 16 C 2 A. 7 k 6 p 3 (log 12 n )(log 3 d ) n 3 d v ( H ) / 3 ≤ X non-iso. H ⊆ K n :1 ≤ e ( H ) ≤ D 64 e ( H ) n − (( ε ∧ δ ) / 6) v ( H ) ≤ X non-iso. H ⊆ K n :1 ≤ e ( H ) ≤ D n − (( ε ∧ δ ) / 12) v ( H ) . (6.4) Here, for each constant ε > 0, the second inequalit y holds as long as n is sufficiently large. T o see this, fix a constant C 0 > 0 suc h that d 7→ d/ log 3 d is increasing for d ≥ C 0 . If k 6 p 3 /n 3 < C 0 then 16 C 2 A. 7 k 6 p 3 (log 12 n )(log 3 d ) n 3 d ≤ 16 C 2 A. 7 C 0 (log 12 n )(log 3 d ) d ≤ n − δ / 2 for all sufficiently large n ; otherwise, 16 C 2 A. 7 k 6 p 3 (log 12 n )(log 3 d ) n 3 d ≤ 16 C 2 A. 7 (log 12 n )(log 3 ( k 6 p 3 /n 3 − ε )) n ε ≤ n − ε/ 2 for all sufficiently large n . The last inequalit y in ( 6.4 ) follows from e ( H ) ≤ v ( H ) 2 ∧ D ≤ v ( H ) √ D ≤ v ( H ) log n/ log (log n ), whic h implies 64 e ( H ) ≤ n (( ε ∧ δ ) / 12) v ( H ) for all sufficien tly large n . Our arguments for controlling the last term in ( 6.4 ) are similar to those in [ BB24b , Prop osition 3.1]. As v ( H ) ≤ 2 e ( H ) ≤ 2 D , we b ound the num b er of non-isomorphic graphs as a function of v ( H ). In particular, the n um b er of non-isomorphic graphs with v ( H ) = v and e ( H ) ≤ D is at most 2 ( v 2 ) ∧ v 2 + 1 D ≤ 2 v 2 ∧ exp(2 D log v ) . (6.5) Here, 2 ( v 2 ) follo ws from en umerating all of the possible c hoices { 0 , 1 } ( v 2 ) for the edges, and v 2 + 1 D follo ws from deciding to add edge among the v 2 p ossible c hoices (or to not add) at eac h time. No w fix an y function g : N → N such that g ( n ) = ω (1) and g ( n ) = o (log (log n )). If v ≤ √ D g ( n ) then ( 6.5 ) is at most 2 v 2 ≤ 2 v ( √ Dg ( n )+1) ≤ 2 v log n/ log(log n ) × g ( n )+ v = 2 o ( v log n ) . Similarly , if v > √ D g ( n ) then ( 6.5 ) is at most exp( v × 2 D (log v ) /v ) ≤ exp( v × 2 D log( √ D g ( n )) / ( √ D g ( n ))) ≤ exp( v × 2 log n/ (log (log n )) × log(log n ) /g ( n )) = exp( o ( v log n )), for all sufficiently large n . F rom 28 these, the last term in ( 6.4 ) is at most 2 D X v =1 exp( o ( v log n )) n − (( ε ∧ δ ) / 12) v ≤ 2 D X v =1 n (( ε ∧ δ ) / 24 − ( ε ∧ δ ) / 12) v ≤ 2 Dn − ( ε ∧ δ ) / 24 = o (1) , as exp( o ( v log n )) ≤ n (( ε ∧ δ ) / 24) v for all 1 ≤ v ≤ 2 D , for all sufficien tly large n . 6.2 Sub optimalit y of longer cycle counts Here, w e prov e Prop osition 2.10 . A k ey result is the follo wing prop osition, which pro vides a tight c haracterization of the exp ectation of signed cycle under G ( n, p, d ). This can b e directly translated in to b ounds under P = G ( n, p, d, k ) via Lemma 4.1 . Let Cyc ℓ b e a length- ℓ cycle. Prop osition 6.1 (Exp ectation of signed cycle count) . Supp ose that p ≤ 1 / 2 and d is sufficiently lar ge with d ≥ (5 log (1 /p )) 4 . Then ther e exists a c onstant C 6 . 1 > 0 such that for any 3 ≤ ℓ ≤ n , 1 C ℓ 6 . 1 p ℓ log ℓ/ 2 (1 /p ) d ℓ/ 2 − 1 ≤ E G ∼G ( n,p,d ) Y ij ∈ E (Cyc ℓ ) ( G ij − p ) ≤ C ℓ 6 . 1 p ℓ log ℓ/ 2 (1 /p ) d ℓ/ 2 − 1 . The pro of is deferred to Appendix D.1 . Remark 6.2 (Tightness and implications) . While ther e ar e pr evious works giving upp er b ounds on this value (e.g., [ LMSY23 , BB24b ]), our upp er b ound identifies the c orr e ct asymptotic dep endenc e in al l p ar ameters (up to a c onstant factor in the b ase, with ℓ as an exp onent). F urthermor e, we pr ovide a matching lower b ound which may b e of indep endent inter est. F or example, we exp e ct that it c an b e use d to show the tightness of the b ound on the se c ond lar gest eigenvalue in [ CZ25 ]; se e also R emark 6.3 . As a direct corollary of Prop osition 6.1 , we show that longer cycle coun ts are strictly less p o werful than the triangle coun t. Pr o of of Pr op osition 2.10 . Let f ℓ ( G ) b e the signed coun t of Cyc ℓ of G . By Prop osition 6.1 and Lemma 4.1 . 0 ≤ E G ∼P [ f ℓ ( G )] − E G ∼Q [ f ℓ ( G )] ≤ n ℓ ( ℓ − 1)! 2 × k n ℓ C ℓ 6 . 1 p ℓ log ℓ/ 2 (1 /p ) d ℓ/ 2 − 1 , as the num b er of distinct length- ℓ cycles in K n is n ℓ ( ℓ − 1)! 2 . F urthermore, a straigh tforw ard calcu- lation yields V ar G ∼Q [ f ℓ ( G )] = n ℓ ( ℓ − 1)! 2 ( p (1 − p )) ℓ . Then arranging E G ∼P [ f ℓ ( G )] − E G ∼Q [ f ℓ ( G )] ≫ p V ar G ∼Q [ f ℓ ( G )] yields the result. W e briefly discuss sp ectral algorithms b elo w, as signed cycle coun ts are closely related to those via trace metho d [ Wig58 , V u07 ]. 29 Remark 6.3 (Spectral tests) . Sever al r e c ent p ap ers [ LMSY23 , BB24b , CZ25 ] have studie d the sp e ctr al pr op erty of the ful l mo del G ( n, p, d ) . F or notation, let A b e the c enter e d adjac ency matrix of G ∼ G ( n, p, d ) , i.e., A ij := G ij − p if i = j and A ii := 0 . [ CZ25 ] showe d that if d = e Ω( np ) , (i) The empiric al distribution of the eigenvalues of A c onver ges to the same semicir cle law as in G ( n, p ) . (ii) The lar gest eigenvalue of A is of the same or der (up to p olylo garithmic factors) as that of G ( n, p ) . Informal ly, these r esults suggest that “na ¨ ıve” sp e ctr al tests (e.g., thr esholding the lar gest eigenvalue of A ) may b e sub optimal c omp ar e d to the glob al signe d triangle c ount, which suc c e e ds al l the way up to d = o ( n 3 p 3 log 3 (1 /p )) . The r esult of [ CZ25 ] is b ase d on the tr ac e metho d, wher e in p art Pr op osition 6.1 c an b e applie d. Base d on that, we exp e ct that (i) and (ii) would hold for G ∼ G ( n, p, d, k ) if d = e Ω( k 2 p/n ) , and henc e the c orr esp onding sub optimality of na ¨ ıve sp e ctr al tests would p ersist. However, this has a simple fix, which is to c onsider ( A ) 3 inste ad of A . Then the tr ac e of ( A ) 3 is e qual to 8 the glob al signe d triangle c ount, and we exp e ct that a test that thr esholds the lar gest eigenvalue of ( A ) 3 would have the same p erformanc e. We cho ose not to pursue this dir e ction, as it do es not se em to have any p articular advantage over (and is c onc eptual ly identic al to) the glob al test (The or em 2.1 ). 7 Discussion W e studied the detection problem for a new random graph mo del, in which a small comm unity with latent high-dimensional geometry is hidden inside a larger Erd˝ os–R ´ enyi graph. The mo del is designed inten tionally to b e minimal: it in tro duces non trivial geometric structures in to a communit y without altering marginal vertex statistics. In that sense, the model pro vides a clean setting for understanding ho w a structural signal (rather than increased densit y alone, for example) affects the limits of detection. W e characterized detection thresholds via tests based on signed triangles, and examined hardness b oth information-theoretically and computationally , rev ealing a computational– statistical gap. En route, we c haracterized a regime where the Wishart and the spherical Wishart distributions are asymptotically equiv alent while b eing distinct from GOE, as w ell as tigh t b ounds on signed cycle coun ts which ma y b e of indep enden t interest. F o cusing on the detection problem, for any fixed p our upp er and lo w er b ounds match up to a logarithmic factor. F or v anishing p , how ev er, a gap remains. Improving the dep endence on p is a ma jor op en question ev en for the full mo del where k = n [ LMSY22 ], and seems to require substan tially new ideas. Other in teresting op en directions are to sharp en the dep endence on k /n , or to dev elop fine-grained results in sp ecific regimes (e.g., sparse p = O (1 /k )) where differen t tec hniques ma y apply [ LMSY22 ]. In our mo del, the comm unit y structure introduces a new lay er for statistical tasks beyond detection. An immediate question concerns the threshold for exact or appro ximate reco very of the comm unit y v ertices. Certain mo dels with laten t-based comm unities exhibit a detection-reco v ery gap [ MWZ23 , KSWY25 , MWZ25 ], and it is plausible that a similar phenomenon o ccurs here. More broadly , revisiting the statistical and computational prop erties of the full mo del G ( n, p, d ) (as recen tly established in, e.g., [ BB24b , BB25b , CZ25 ]) in our lo calized setting G ( n, p, d, k ) could shed ligh t on the interpla y b et w een high-dimensional geometry and communit y structure. 8 F ormally , this is up to a factor of 6 due to the duplicates among the summands in T r(( A ) 3 ). 30 Ac kno wledgemen ts W e thank Kiril Bangachev for helpful discussions on the reference [ LR23b ] and the ideas therein, and Jiaming Xu for helpful discussions on the detection problem at an early stage of the pro ject. References [ABAL + 26] Louigi Addario-Berry , Omer Angel, G´ ab or Lugosi, Mikl´ os Z. R´ acz, and Tselil Schramm. The statistical threshold for planted matchings and spanning trees. arXiv pr eprint arXiv:2602.07669 , 2026. [Abb17] Emman uel Abb e. Communit y detection and sto chastic blo c k models: recen t dev elopmen ts. J. Mach. L e arn. R es. , 18(177):1–86, 2017. [ABD21] Konstan tin Avrac henk ov, Andrei Bobu, and Maximilien Dreveton. Higher-order sp ectral clus- tering for geometric graphs. J. F ourier A nal. Appl. , 27(22):1–29, 2021. [ABI24] P edro Abdalla, Afonso S. Bandeira, and Clara Inv ernizzi. Guaran tees for sp on taneous syn- c hronization on random geometric graphs. SIAM J. Appl. Dyn. Syst. , 23(1):779–790, 2024. [ABS21] Emman uel Abb e, F ran¸ cois Baccelli, and Abishek Sank araraman. Communit y detection on Euclidean random graphs. Inf. Infer enc e , 10(1):109–160, 2021. [A CBL12] Ery Arias-Castro, S ´ ebastien Bubeck, and G´ ab or Lugosi. Detection of correlations. A nn. Statist. , 40(1):412–435, 2012. [A CBL15] Ery Arias-Castro, S´ ebastien Bub ec k, and G´ ab or Lugosi. Detecting p ositiv e correlations in a m ultiv ariate sample. Bernoul li , 21(1):209–241, 2015. [A CBL V18] Ery Arias-Castro, S´ ebastien Bub eck, G´ ab or Lugosi, and Nicolas V erzelen. Detecting Marko v random fields hidden in white noise. Bernoul li , 24(4B):3628–3656, 2018. [A CV14] Ery Arias-Castro and Nicolas V erzelen. Communit y detection in dense random netw orks. A nn. Statist. , 42(3):940–969, 2014. [AKL24] Konstan tin Avrachenk ov, B. R. Vinay Kumar, and Lasse Lesk el¨ a. Comm unity detection on blo c k models with geometric kernels. arXiv pr eprint arXiv:2403.02802 , 2024. [AS65] Milton Abramowitz and Irene A. Stegun. Handb o ok of mathematic al functions: with formulas, gr aphs, and mathematic al tables , volume 55. Courier Corp oration, 1965. [A TK15] Leman Akoglu, Hanghang T ong, and Danai Koutra. Graph based anomaly detection and description: a surv ey . Data Min. Know l. Disc ov. , 29(3):626–688, 2015. [A W15] Rados la w Adamczak and Pa w e l W olff. Concen tration inequalities for non-Lipschitz functions with bounded deriv ativ es of higher order. Pr ob ab. The ory R elate d Fields , 162(3-4):531–586, 2015. [Bar16] Alb ert-L´ aszl´ o Barab´ asi. Network Scienc e . Cam bridge Universit y Press, 2016. [BB20] Matthew Brennan and Guy Bresler. Reducibility and statistical-computational gaps from secret leak age. In Pr o c e e dings of Thirty Thir d Confer enc e on L e arning The ory , v olume 125 of PMLR , pages 648–847, 2020. [BB24a] Kiril Bangac hev and Guy Bresler. Detection of L ∞ geometry in random geometric graphs: sub optimalit y of triangles and cluster expansion. In Pr o c e e dings of Thirty Seventh Confer enc e on L e arning The ory , volume 247 of PMLR , pages 427–497, 2024. [BB24b] Kiril Bangachev and Guy Bresler. On the Fourier co efficien ts of high-dimensional random geometric graphs. In Pr o c e e dings of the 56th Annual ACM Symp osium on The ory of Computing , pages 549–560, 2024. 31 [BB25a] Kiril Bangac hev and Guy Bresler. Random algebraic graphs and their conv ergence to Erd˝ os- R ´ en yi. R andom Structur es Algorithms , 66(1):e21276, 1–43, 2025. [BB25b] Kiril Bangac hev and Guy Bresler. Sandwic hing random geometric graphs and Erd˝ os-R´ enyi with applications: sharp thresholds, robust testing, and enumeration. In Pr o c e e dings of the 57th A nnual A CM Symp osium on The ory of Computing , pages 310–321, 2025. [BBAP05] Jinho Baik, G´ erard Ben Arous, and Sandrine P´ ech ´ e. Phase transition of the largest eigenv alue for nonnull complex sample co v ariance matrices. Ann. Pr ob ab. , 33(5):1643–1697, 2005. [BBCvdH20] Gianmarco Bet, Kay Bogerd, Rui M. Castro, and Remco v an der Hofstad. Detecting a b otnet in a net work. Math. Stat. L e arn. , 3(3-4):315–343, 2020. [BBH21] Matthew Brennan, Guy Bresler, and Brice Huang. De finetti-st yle results for Wishart matrices: com binatorial structure and phase transitions. arXiv pr eprint arXiv:2103.14011 , 2021. [BBH24] Matthew Brennan, Guy Bresler, and Brice Huang. Threshold for detecting high dimensional geometry in anisotropic random geometric graphs. R andom Structur es A lgorithms , 64(1):125– 137, 2024. [BBN20] Matthew Brennan, Guy Bresler, and Dheera j Nagara j. Phase transitions for detecting latent geometry in random graphs. Pr ob ab. The ory R elate d Fields , 178(3-4):1215–1289, 2020. [BCC + 10] Adity a Bhask ara, Moses Charik ar, Eden Chlam tac, Uriel F eige, and Aravindan Vija y aragha v an. Detecting high log-densities: an O ( n 1 / 4 ) appro ximation for densest k -subgraph. In Pr o c e e dings of the 42nd A nnual ACM Symp osium on The ory of Computing , pages 201–210, 2010. [BDER16] S´ ebastien Bub ec k, Jian Ding, Ronen Eldan, and Mikl´ os Z. R´ acz. T esting for high-dimensional geometry in random graphs. R andom Structur es Algorithms , 49(3):503–532, 2016. [BDT + 20] Viv ek Bagaria, Jian Ding, David Tse, Yihong W u, and Jiaming Xu. Hidden Hamiltonian cycle reco very via linear programming. Op er. R es. , 68(1):53–70, 2020. [BG18] S ´ ebastien Bubeck and Shirshendu Ganguly . En tropic CL T and phase transition in high- dimensional Wishart matrices. Int. Math. R es. Not. IMRN , 2018(2):588–606, 2018. [BGK + 01] Andreas Brieden, Peter Gritzmann, Ravindran Kannan, Victor Klee, L´ aszl´ o Lov´ asz, and Mikl´ os Simono vits. Deterministic and randomized p olynomial-time appro ximation of radii. Mathe- matika , 48(1-2):63–105, 2001. [BGPS25] Sam uel Baguley , Andreas G¨ ob el, Marcus Pappik, and Leon Schiller. T esting thresholds and sp ectral prop erties of high-dimensional random toroidal graphs via Edgeworth-st yle expan- sions. In Pr o c e e dings of Thirty Eighth Confer enc e on L e arning The ory , v olume 291 of PMLR , pages 200–201, 2025. [BHJK25] Rares-Darius Buhai, Jun-Ting Hsieh, Aa yush Jain, and Prav esh K. Kothari. The quasi- p olynomial low-degree conjecture is false. In IEEE 66th Annual Symp osium on F oundations of Computer Scienc e , pages 2577–2590, 2025. [BKL19] Karl Bringmann, Ralph Keusch, and Johannes Lengler. Geometric inhomogeneous random graphs. The or et. Comput. Sci. , 760:35–54, 2019. [BMS25] Gianmarco Bet, Riccardo Mic hielan, and Clara Stegehuis. Localized geometry detection in scale-free random graphs. J. Appl. Pr ob ab. , page 1–17, 2025. [BO04] Alb ert-L´ aszl´ o Barab´ asi and Zolt´ an N. Oltv ai. Net work biology: understanding the cell’s func- tional organization. Nat. R ev. Genet. , 5(2):101–113, 2004. [BR13] Quen tin Berthet and Philipp e Rigollet. Complexit y theoretic lo wer bounds for sparse principal comp onen t detection. In Pr o c e e dings of the 26th Annual Confer enc e on L e arning The ory , v olume 30 of PMLR , pages 1046–1066, 2013. [CW19] Didier Ch´ etelat and Martin T. W ells. The middle-scale asymptotics of Wishart matrices. A nn. Statist. , 47(5):2639–2670, 2019. 32 [CZ25] Yifan Cao and Yizhe Zh u. Sp ectra of high-dimensional sparse random geometric graphs. arXiv pr eprint arXiv:2507.06556 , 2025. [DDC23] Quen tin Duchemin and Y ohann De Castro. Random geometric graph: some recent develop- men ts and p ersp ectiv es. In High dimensional pr ob ability IX—the ether e al volume , volume 80 of Pr o gr. Pr ob ab. , pages 347–392. Birkh¨ auser, 2023. [DGLU11] Luc Devroy e, Andr´ as Gy¨ orgy , G´ ab or Lugosi, and F rederic Udina. High-dimensional random geometric graphs and their clique n umber. Ele ctr on. J. Pr ob ab. , 16:2481–2508, 2011. [DKMZ11] Aur ´ elien Decelle, Floren t Krzak ala, Cristopher Mo ore, and Lenk a Zdeb oro v´ a. Asymptotic analysis of the sto chastic blo c k mo del for mo dular net works and its algorithmic applications. Phys. R ev. E , 84:066106, 2011. [DL W25] Prabhank a Dek a, F angzhou Luo, and Baic h uan W u. Rare even t probabilities in random geo- metric graphs. arXiv pr eprint arXiv:2510.09196 , 2025. [DS01] Kenneth R. Davidson and Stanisla w J. Szarek. Local op erator theory , random matrices and Banac h spaces. In Handb o ok of the ge ometry of Banach sp ac es, Vol. I , pages 317–366. North- Holland, 2001. [D WXY23] Jian Ding, Yihong W u, Jiaming Xu, and Dana Y ang. The plan ted matching problem: sharp threshold and infinite-order phase transition. Pr ob ab. The ory R elate d Fields , 187(1-2):1–71, 2023. [D X13] F eng Dai and Y uan Xu. Appr oximation The ory and Harmonic A nalysis on Spher es and Bal ls . Springer Monographs in Mathematics. Springer, 2013. [EH25] Dor Elimelech and W asim Huleihel. Detecting arbitrary plan ted subgraphs in random graphs. In Pr o c e e dings of Thirty Eighth Confer enc e on L e arning The ory , v olume 291 of PMLR , pages 1691–1798, 2025. [EM20] Ronen Eldan and Dan Mikulincer. Information and dimensionality of anisotropic random geometric graphs. In Ge ometric asp e cts of functional analysis. Vol. I , v olume 2256 of L e ctur e Notes in Math. , pages 273–324. Springer, 2020. [ER59] P aul Erd˝ os and Alfr´ ed R ´ enyi. On random graphs I. Publ. Math. Debr e c en , 6:290–297, 1959. [F or10] San to F ortunato. Communit y detection in graphs. Phys. R ep. , 486(3-5):75–174, 2010. [FVD + 16] Emilio F errara, On ur V arol, Cla yton Da vis, Filipp o Menczer, and Alessandro Flammini. The rise of social bots. Commun. A CM , 59(7):96–104, 2016. [GGNW24] Julia Gaudio, Charlie Guan, Xiaoch un Niu, and Ermin W ei. Exact label reco v ery in Euclidean random graphs. arXiv pr eprint arXiv:2407.11163 , 2024. [GJ25] Julia Gaudio and Andrew Jin. Exact recov ery in the geometric SBM. arXiv pr eprint arXiv:2512.22773 , 2025. [GJ26] Julia Gaudio and Andrew Jin. Exact reco very in the geometric hidden comm unity mo del. arXiv pr eprint arXiv:2601.17591 , 2026. [GMPS18] Sain yam Galhotra, Arya Mazumdar, Soum y abrata Pal, and Barna Saha. The geometric blo c k mo del. Pr o c e e dings of the AAAI Confer enc e on A rtificial Intel ligenc e , 32(1), 2018. [GMPS23] Sain yam Galhotra, Ary a Mazumdar, Soum y abrata Pal, and Barna Saha. Communit y recov ery in the geometric blo c k model. J. Mach. L e arn. R es. , 24(338):1–53, 2023. [GN02] Mic helle Girv an and Mark E. J. Newman. Communit y structure in social and biological net- w orks. Pr o c. Natl. A c ad. Sci. U.S.A. , 99(12):7821–7826, 2002. [GNW24] Julia Gaudio, Xiao c hun Niu, and Ermin W ei. Exact communit y recov ery in the geometric SBM. In Pr o c e e dings of the 2024 Annual ACM-SIAM Symp osium on Discr ete Algorithms , pages 2158–2184, 2024. 33 [GSXY25] Julia Gaudio, Colin Sandon, Jiaming Xu, and Dana Y ang. Finding plan ted cycles in a random graph. arXiv pr eprint arXiv:2511.04058 , 2025. [HHLM99] Leland H. Hartw ell, John J. Hopfield, Stanislas Leibler, and Andrew W. Murray . F rom molec- ular to modular cell biology . Natur e , 402(6761 Suppl):C47–C52, 1999. [HK11] Elad Hazan and Robert Krauthgamer. Ho w hard is it to approximate the b est Nash equilib- rium? SIAM J. Comput. , 40(1):79–91, 2011. [HKK + 26] Jun-Ting Hsieh, Daniel M. Kane, Pra v esh K. Kothari, Jerry Li, Sidhan th Mohant y , and Stefan Tiegel. Rigorous implications of the low-degree heuristic. arXiv pr eprint arXiv:2601.05850 , 2026. [HLL83] Paul W. Holland, Kathryn Blac kmond Laskey , and Sam uel Leinhardt. Stochastic blockmodels: first steps. So c. Netw. , 5(2):109–137, 1983. [Hop18] Samuel Hopkins. Statistic al infer enc e and the sum of squar es metho d . PhD thesis, Cornell Univ ersity , 2018. [HRH02] Peter D. Hoff, Adrian E. Raftery , and Mark S. Handco c k. Laten t space approaches to social net work analysis. J. Amer. Statist. Asso c. , 97(460):1090–1098, 2002. [HR T07] Mark S. Handco c k, Adrian E. Raftery , and Jerem y M. T antrum. Mo del-based clustering for so cial net works. J. R oy. Statist. So c. Ser. A , 170(2):301–354, 2007. [Hul22] W asim Huleihel. Inferring hidden structures in random graphs. IEEE T r ans. Signal Inform. Pr o c ess. Netw. , 8:855–867, 2022. [HW21] Justin Holmgren and Alexander S. W ein. Coun terexamples to the low-degree conjecture. In 12th Innovations in The or etic al Computer Scienc e Confer enc e , v olume 185 of LIPIcs , pages 75:1–75:9, 2021. [HWX15] Bruce Ha jek, Yihong W u, and Jiaming Xu. Computational low er bounds for communit y detection on random graphs. In Pr o c e e dings of The 28th Confer enc e on L e arning The ory , v olume 40 of PMLR , pages 899–928, 2015. [IS03] Y u I. Ingster and Irina A. Suslina. Nonp ar ametric Go o dness-of-Fit T esting Under Gaussian Mo dels , v olume 169 of L e ctur e Notes in Statistics . Springer, 2003. [Jer92] Mark Jerrum. Large cliques elude the Metrop olis pro cess. R andom Structur es A lgorithms , 3(4):347–359, 1992. [JL15] Tiefeng Jiang and Danning Li. Approximation of rectangular b eta-Laguerre ensembles and large deviations. J. The or et. Pr ob ab. , 28(3):804–847, 2015. [Joh01] Iain M. Johnstone. On the distribution of the largest eigenv alue in principal comp onen ts analysis. Ann. Statist. , 29(2):295–327, 2001. [JP00] Ari Juels and Marcus P einado. Hiding cliques for cryptographic security . Des. Co des Crypto gr. , 20(3):269–280, 2000. [JV26] He Jia and Aravindan Vijay araghav an. Low-degree metho d fails to predict robust subspace reco very . arXiv pr eprint arXiv:2603.02594 , 2026. [Kra07] Ilia Krasiko v. An upp er b ound on Jacobi p olynomials. J. Appr ox. The ory , 149(2):116–130, 2007. [KSWY25] Dmitriy Kunisky , Daniel A. Spielman, Alexander S. W ein, and Xifan Y u. Statistical inference of a rank ed comm unity in a directed graph. In Pr o c e e dings of the 57th Annual ACM Symp osium on The ory of Computing , pages 2107–2117, 2025. [Ku ˇ c95] Lud ˇ ek Kuˇ cera. Exp ected complexity of graph partitioning problems. Discr ete Appl. Math. , 57(2-3):193–212, 1995. 34 [KWB22] Dmitriy Kunisky , Alexander S. W ein, and Afonso S. Bandeira. Notes on computational hard- ness of h yp othesis testing: predictions using the lo w-degree likelihoo d ratio. In Mathematic al analysis, its applic ations and c omputation , volume 385 of Springer Pr o c. Math. Stat. , pages 1–50. Springer, 2022. [LKJ09] Daniel Lew ando wski, Dorota Kuro wic k a, and Harry Joe. Generating random correlation ma- trices based on vines and extended onion metho d. J. Multivariate Anal. , 100(9):1989–2001, 2009. [LM00] B ´ eatrice Laurent and Pascal Massart. Adaptive estimation of a quadratic functional by mo del selection. Ann. Statist. , 28(5):1302–1338, 2000. [LMSY22] Siqi Liu, Sidhan th Mohant y , Tselil Schramm, and Elizab eth Y ang. T esting thresholds for high-dimensional sparse random geometric graphs. In Pr o c e e dings of the 54th Annual A CM Symp osium on The ory of Computing , pages 672–677, 2022. [LMSY23] Siqi Liu, Sidhan th Mohant y , Tselil Schramm, and Elizabeth Y ang. Lo cal and global expansion in random geometric graphs. In Pr o c e e dings of the 55th A nnual ACM Symp osium on The ory of Computing , pages 817–825, 2023. [LPRZ25] Daniel Z. Lee, F rancisco P ernice, Amit Ra jaraman, and Ilias Zadik. The fundamental limits of reco vering planted subgraphs (extended abstract). In Pr o c e e dings of Thirty Eighth Confer enc e on L e arning The ory , volume 291 of PMLR , pages 3578–3579, 2025. [LR23a] Suqi Liu and Mikl´ os Z. R´ acz. Phase transition in noisy high-dimensional random geometric graphs. Ele ctr on. J. Stat. , 17(2):3512–3574, 2023. [LR23b] Suqi Liu and Mikl´ os Z. R´ acz. A probabilistic view of laten t space graphs and phase transitions. Bernoul li , 29(3):2417–2441, 2023. [LS23] Shuangping Li and Tselil Schramm. Sp ectral clustering in the Gaussian mixture blo c k mo del. arXiv pr eprint arXiv:2305.00979 , 2023. [Mat13] Ji ˇ r ´ ı Matou ˇ sek. L e ctur es on Discr ete Ge ometry , v olume 212 of Gr aduate T exts in Mathematics . Springer-V erlag, 2013. [MMX21] Mehrdad Moharrami, Cristopher Mo ore, and Jiaming Xu. The plan ted matching problem: phase transitions and exact results. Ann. Appl. Pr ob ab. , 31(6):2663–2720, 2021. [MNWS + 25] Elc hanan Mossel, Jonathan Niles-W eed, Y oungtak Sohn, Nik e Sun, and Ilias Zadik. Sharp thresholds in inference of planted subgraphs. A nn. Appl. Pr ob ab. , 35(1):523–563, 2025. [MO18] Carlo Morselli and Marie Ouellet. Netw ork similarity and collusion. So c. Netw. , 55:21–30, 2018. [MST19] Lauren t Massouli´ e, Ludo vic Stephan, and Don T owsley . Planting trees in graphs, and finding them bac k. In Pr o c e e dings of the Thirty-Se c ond Confer enc e on L e arning The ory , v olume 99 of PMLR , pages 2341–2371, 2019. [MWX26] Cheng Mao, Yihong W u, and Jiaming Xu. Random geometric graphs with smooth kernels: sharp detection threshold and a spectral conjecture. arXiv pr eprint arXiv:2602.14998 , 2026. [MWZ23] Cheng Mao, Alexander S. W ein, and Shenduo Zhang. Detection-reco very gap for planted dense cycles. In Pr o c e e dings of Thirty Sixth Confer enc e on L e arning The ory , volume 195 of PMLR , pages 2440–2481, 2023. [MWZ25] Cheng Mao, Alexander S. W ein, and Shenduo Zhang. Information-theoretic thresholds for plan ted dense cycles. IEEE T r ans. Inform. The ory , 71(2):1266–1282, 2025. [MZ24] Cheng Mao and Shenduo Zhang. Imp ossibility of laten t inner pro duct recov ery via rate distor- tion. In 2024 60th Annual A l lerton Confer enc e on Communic ation, Contr ol, and Computing , pages 01–08, 2024. 35 [NC16] Mark E. J. Newman and Aaron Clauset. Structure and inference in annotated netw orks. Nat. Commun. , 7:11863, 2016. [New10] Mark E. J. Newman. Networks: A n Intr o duction . Oxford Univ ersity Press, 2010. [PCMP05] Carey E. Prieb e, John M. Conro y , David J. Marc hette, and Y oungser P ark. Scan statistics on Enron graphs. Comput. Math. Or ganiz. The or. , 11:229–247, 2005. [P en03] Mathew P enrose. R andom Ge ometric Gr aphs , v olume 5 of Oxfor d Studies in Pr ob ability . Oxford Univ ersity Press, 2003. [PHT + 21] Diogo Pac heco, Pik-Mai Hui, Christopher T orres-Lugo, Bao T ran T ruong, Alessandro Flam- mini, and Filipp o Menczer. Uncov ering co ordinated netw orks on so cial media: metho ds and case studies. In Pr o c e e dings of the ICWSM , volume 15, pages 455–466, 2021. [PP20] Sandrine Pec he and Vianney P erchet. Robustness of comm unity detection to random geometric p erturbations. In A dvanc es in Neur al Information Pr o c essing Systems , v olume 33, pages 17827– 17837, 2020. [PW21] Elliot P aquette and Andrew V ander W erf. Random geometric graphs and the spherical Wishart matrix. arXiv pr eprint arXiv:2110.10785 , 2021. [RR19] Mikl´ os Z. R´ acz and Jacob Ric hey . A smo oth transition from Wishart to GOE. J. The or et. Pr ob ab. , 32(2):898–906, 2019. [SM03] Victor Spirin and Leonid A. Mirny . Protein complexes and functional mo dules in molecular net works. Pr o c. Natl. A c ad. Sci. U.S.A. , 100(21):12123–12128, 2003. [So d07] Sasha So din. T ail-sensitive Gaussian asymptotics for marginals of concen trated measures in high dimension. In Ge ometric asp e cts of functional analysis , v olume 1910 of L e ctur e Notes in Math. , pages 271–295. Springer, 2007. [V AC15] Nicolas V erzelen and Ery Arias-Castro. Communit y detection in sparse random netw orks. A nn. Appl. Pr ob ab. , 25(6):3465–3510, 2015. [V er18] Roman V ersh ynin. High-Dimensional Pr ob ability , v olume 47 of Cambridge Series in Statistic al and Pr ob abilistic Mathematics . Cam bridge Universit y Press, 2018. [V u07] V an H. V u. Sp ectral norm of random matrices. Combinatoric a , 27(6):721–736, 2007. [W ar16] Lutz W arnk e. On the metho d of typical b ounded differences. Combin. Pr ob ab. Comput. , 25(2):269–299, 2016. [W ei25] Alexander S. W ein. Computational complexity of statistics: new insigh ts from low-degree p olynomials. arXiv pr eprint arXiv:2506.10748 , 2025. [Wig58] Eugene P . Wigner. On the distribution of the ro ots of certain symmetric matrices. Ann. of Math. (2) , 67:325–327, 1958. [WK19] Johannes W ac hs and J´ anos Kert´ esz. A net work approach to cartel detection in public auction mark ets. Sci. R ep. , 9(1):10818, 2019. [WM25] Timoth y L. H. W ee and Cheng Mao. Cluster expansion of the log-likelihoo d ratio: optimal detection of plan ted matc hings. arXiv pr eprint arXiv:2512.14567 , 2025. [YZZ25] Xifan Y u, Ilias Zadik, and Peiyuan Zhang. Coun ting stars is constan t-degree optimal for detecting any planted subgraph. Math. Stat. L e arn. , 8(1-2):105–164, 2025. 36 A Auxiliary lemmas A.1 Concen tration inequalities Here, w e record sev eral concentration inequalities that will b e used throughout our analysis. Each inequalit y will b e referenced in different parts, and readers ma y visit these results later as needed. The first t w o results (Lemmas A.1 and A.2 ) consider certain p olynomials of w e ll-behav ed distri- butions. These can b e deriv ed as corollaries of a general concentration inequality for p olynomials of subgaussian v ariables [ A W15 , Theorem 1.4]. Lemma A.1 (Concen tration of signed triangle coun t) . L et G ∼ G ( n, p ) . Then ther e exists a c onstant C A. 1 > 0 such that for f tri ( G ) = P i 0 , P ( | f tri ( G ) | ≥ t ) ≤ 2 exp − 1 C A. 1 t 2 log 3 (1 /p ) n 3 ∧ t log 3 / 2 (1 /p ) √ n ∧ t 2 / 3 log(1 /p ) !! . Lemma A.2 (Concentration of trace of GOE) . L et Y ∼ GOE( n ) , that is, Y ∈ R n × n is a symmetric matrix with Y ii ∼ N (0 , 2) , i ∈ [ n ] and Y ij = Y j i ∼ N (0 , 1) , i < j ∈ [ n ] indep endently. Then ther e exists a c onstant C A. 2 > 0 such that for f 2 ( Y ) := T r( Y 2 ) and f 3 ( Y ) := T r( Y 3 ) , for any t > 0 , P ( | T r( Y 2 ) − ( n 2 + n ) | ≥ t ) ≤ 2 exp − 1 C A. 2 t 2 n 2 ∧ t n , P ( | T r( Y 3 ) | ≥ t ) ≤ 2 exp − 1 C A. 2 t 2 n 3 ∧ t 2 / 3 . W e also use the following lo calized version of martingale concentration (i.e., F reedman’s in- equalit y). Its pro of can b e found in, e.g., [ W ar16 , Lemma 2.2]. Lemma A.3 (F reedman’s inequality) . L et { M i } 0 ≤ i ≤ n b e a martingale with r esp e ct to filtr ation {F i } 0 ≤ i ≤ n and U i , i ∈ [ n ] b e F i − 1 -me asur able r andom variable such that M i − M i − 1 ≤ U i for al l i ∈ [ n ] . Then for any t > 0 , v > 0 , and m > 0 , P M n − M 0 ≥ t, n X i =1 V ar[ M i − M i − 1 |F i − 1 ] ≤ v , max 1 ≤ i ≤ n U i ≤ m ! ≤ exp − t 2 4 v ∧ t 2 m . The follo wing result captures how the neighborho o d distributions under G ( n, p ) and G ( n, p, d ) are different. 9 Note that for a single vertex, the distributions are marginally equal; the lemma compares the distributions conditioned on the latents { U i } . Lemma A.4 (Concentration of spherical caps; [ LMSY22 , Lemma 5.1, Corollary 6.1]) . Assume 1 /n ≤ p ≤ 1 / 2 , and c onsider the neighb orho o d distributions of vertex ℓ + 1 with vertic es 1 , . . . , ℓ 9 The inequality in Lemma A.4 is stated with logarithmic terms in d, 1 /p instead of logarithmic terms in n as in [ LMSY22 , Corollary 6.1]. This is only to av oid the formal condition of d ≤ poly( n ) used in the latter, and the current form can b e deriv ed as in the pro of of [ LMSY22 , Corollary 6.1] from [ LMSY22 , Lemma 5.1]. 37 under G ( n, p ) and G ( n, p, d ) . That is, for γ ∈ { 0 , 1 } ℓ , let Q ℓ +1 ( γ ) := p P ℓ i =1 γ i (1 − p ) ℓ − P ℓ i =1 γ i , e P ℓ +1 ( γ | U 1 , . . . , U ℓ ) := E U ℓ +1 Y i ∈ [ ℓ ]: γ i =1 1 {⟨ U ℓ +1 , U i ⟩ ≥ τ } Y i ∈ [ ℓ ]: γ i =0 1 {⟨ U ℓ +1 , U i ⟩ < τ } , wher e U i i . i . d . ∼ U ( S d − 1 ) . Then ther e exists a c onstant C A. 4 > 0 such that for al l t ≥ 0 and sufficiently lar ge n , P U 1 ,...,U ℓ e P ℓ +1 ( γ | U 1 , . . . , U ℓ ) Q ℓ +1 ( γ ) − 1 ≥ t ! ≤ C A. 4 exp − d ( t 2 ∧ 1) C A. 4 M log (1 /p ) log ( d/p ) + C A. 4 log n , wher e M = M ( ℓ, p, γ ) := P ℓ i =1 γ i log(1 /p ) + ℓp + log ( d/p ) P ℓ i =1 γ i + ℓp . Finally , we record the following standard results. The first one is on the concentration of the χ 2 distribution; the second one states that the eigenv alues of the spherical Wishart are concentrated around 1. Lemma A.5 (Concentration of χ 2 ( d )) . L et Z i ∼ N (0 , I d ) , i ∈ [ k ] b e indep endent. Then with pr ob ability at le ast 1 − 2 k exp( − d/ 1000) , ∥ Z i ∥ √ d ∈ [0 . 9 , 1 . 1] for al l i ∈ [ k ] . Pr o of. The pro of follo ws from [ LM00 , Lemma 1] and a union b ound. Lemma A.6 (Sp ectrum of spherical Wishart) . L et d ≥ k and U = U 1 | . . . | U k ∈ R d × k b e such that U i ∼ U ( S d − 1 ) , i ∈ [ k ] ar e indep endent. Then ther e exists a c onstant C A. 6 > 0 such that with pr ob ability at le ast 1 − (2 k + 2) exp( − k /C A. 6 ) , U T U − I k op ≤ C A. 6 r k d . Pr o of. W rite U i = Z i / ∥ Z i ∥ where Z i i . i . d . ∼ N (0 , I d ) , i ∈ [ k ] and Z = ( Z 1 | . . . | Z k ). Then b y [ V er18 , Theorem 4.6.1], w e hav e Z T Z d − I k op = O r k d ! , with probabilit y at least 1 − 2 exp( − Ω( k )). As U = Z D where D := diag(1 / ∥ Z 1 ∥ , . . . , 1 / ∥ Z k ∥ ), w e ha ve U T U − I k op = D Z T Z D − I k op ≤ √ dD Z T Z d − I k √ dD op + dD 2 − I k op = O r k d ! , with probabilit y at least 1 − (2 k + 2) exp( − Ω( k )), where w e used that P ( |∥ Z 1 ∥ 2 − d | > 4 √ dk ) ≤ 2 exp( − Ω( k )) [ LM00 , Lemma 1] and union b ound. 38 A.2 Upp er b ound on signed subgraph counts Aside from sp ecific cases, it is difficult to directly calculate the exp ectation of signed subgraph coun t under the random geometric graph. A recen t w ork [ BB24b ] provided a neat solution to this, sho wing an upp er b ound that applies to all subgraphs of mo derate size and only dep ends on the n um b ers of their v ertices and edges. Lemma A.7 (Upp er b ound on signed subgraph count; [ BB24b , Theorem 1.1]) . Assume that ther e exists a c onstant δ > 0 such that d ≥ n δ and n − 1+ δ ≤ p ≤ 1 / 2 . Then ther e exists a c onstant C A. 7 = C A. 7 ( δ ) > 0 such that the fol lowing holds: for any c onne cte d gr aph H that satisfies C A. 7 v ( H ) e ( H ) log 3 / 2 d ≤ √ d , E G ∼G ( n,p,d ) Y ij ∈ E ( H ) ( G ij − p ) ≤ (8 p ) e ( H ) C A. 7 v ( H ) e ( H ) log 3 / 2 d √ d ! ⌈ ( v ( H ) − 1) / 2 ⌉ . B Deferred pro ofs in Section 4 B.1 V ariance of signed triangle count (Lemma 4.4 ) W e express the condition γ tri ≫ p V ar G ∼P [ f tri ( G )] , (B.1) as an inequalit y with resp ect to a sp ecific parameter ε = ε ( p, d ) > 0, and in v ok e its low er b ound to translate that as a condition on d . Namely , define ε = ε ( p, d ) := P G ∼G ( n,p,d ) ( G 12 G 13 G 23 = 1 | G 23 = 1) p 2 − 1 . Using the pairwise independence of edges inciden t to a common v ertex (i.e., E G ∼G ( n,p,d ) [ G 12 G 13 ] = p 2 ), the exp ectation of the signed triangle simplifies to: E G ∼G ( n,p,d ) [( G 12 − p )( G 13 − p )( G 23 − p )] = E G ∼G ( n,p,d ) [ G 12 G 13 G 23 ] − p 3 = p 3 ε , where the last equalit y holds b y E G ∼G ( n,p,d ) [ G 12 G 13 G 23 ] = p P G ∼G ( n,p,d ) ( G 12 G 13 G 23 = 1 | G 23 = 1) and the definition of ε . Then, we get γ tri = 1 2 E G ∼P [ f tri ( G )] = 1 2 n 3 k n 3 E G ∼G ( n,p,d ) [( G 12 − p )( G 13 − p )( G 23 − p )] = Ω( k 3 p 3 ε ) , (B.2) where the first equalit y holds b y Lemma 4.1 , and the second holds b y the previous display ed equalit y . F ollowing through the lines of [ LMSY22 , Equations 21–25] with Lemma 4.1 , for T ij l := ( G ij − p )( G j l − p )( G il − p ) − E G ∼P [( G ij − p )( G j l − p )( G il − p )] we obtain V ar G ∼P [ f tri ( G )] = n 3 E G ∼P [( T 123 ) 2 ] + 12 n 4 E G ∼P [ T 123 T 124 ] + 30 n 5 E G ∼P [ T 123 T 145 ] . (B.3) F or the first term in ( B.3 ), we ha ve E G ∼P [( T 123 ) 2 ] ≤ E G ∼P [( T 123 ) 2 ] = (1 − 2 p ) 3 E G ∼P [ G 12 G 23 G 13 ] + 3(1 − 2 p ) 2 p 4 + 3(1 − 2 p ) p 5 + p 6 = (1 − 2 p ) 3 p 3 (1 + ( k/n ) 3 ε ) + 3(1 − 2 p ) 2 p 4 + 3(1 − 2 p ) p 5 + p 6 = O p 3 (1 + ( k/n ) 3 ε ) . (B.4) 39 F or the second term in ( B.3 ), we first ha ve E G ∼P [ T 123 T 124 ] ≤ E G ∼P [ T 123 T 124 ] = k n 4 E G ∼G ( n,p,d ) [ T 123 T 124 ] ≤ k n 4 E ⟨ U 1 ,U 2 ⟩ h E U 1 [ G 13 G 23 | ⟨ U 1 , U 2 ⟩ ] − p 2 2 i , where the equality is from Lemma 4.1 , and the second inequalit y is from [ BDER16 , Equation 24]. The exp ectation in the last term is equal to a signed 4-cycle coun t under G ( n, p, d ), since: E ⟨ U 1 ,U 2 ⟩ h E [ G 13 G 23 | ⟨ U 1 , U 2 ⟩ ] − p 2 2 i = E ⟨ U 1 ,U 2 ⟩ h ( E U 3 [( G 13 − p )( G 23 − p ) | U 1 , U 2 ]) 2 i = E ⟨ U 1 ,U 2 ⟩ [ E U 3 ,U 4 [( G 13 − p )( G 23 − p )( G 14 − p )( G 24 − p ) | U 1 , U 2 ]] = E ⟨ U 1 ,U 2 ⟩ [ E U 3 ,U 4 [( G 13 − p )( G 23 − p )( G 14 − p )( G 24 − p ) | ⟨ U 1 , U 2 ⟩ ]] , where the first and the last equalities follo w from the rotational in v ariance (i.e., conditioning on ( U 1 , U 2 ) is equiv alen t to conditioning on ⟨ U 1 , U 2 ⟩ ), and the second equalit y is from the conditional indep endence of ( G 13 − p )( G 23 − p ) and ( G 14 − p )( G 24 − p ) given ( U 1 , U 2 ). Th us, E G ∼P [ T 123 T 124 ] ≤ k n 4 E G ∼G ( n,p,d ) [( G 13 − p )( G 23 − p )( G 14 − p )( G 24 − p )] = O k n 4 p 4 log 2 (1 /p ) d ! , (B.5) where the last line follows from Prop osition 6.1 . W e note that the argumen t for this part in [ LMSY22 ] assumes the conditional indep endence of ( G 13 − p )( G 23 − p ) and ( G 14 − p )( G 24 − p ) given G 12 ; ho w ev er, this do es not hold as b oth quantities dep end on the common latent v ectors U 1 and U 2 . W e therefore take a different approach via Prop osition 6.1 , whic h inv olv es a mild assumption of d b eing sufficien tly large and d ≥ (5 log (1 /p )) 4 . Finally , for the third term in ( B.3 ), we ha ve E G ∼P [ T 123 T 145 ] ≤ E G ∼P [ T 123 T 145 ] = k n 5 p 6 ε 2 . (B.6) Com bining ( B.4 ), ( B.5 ) and ( B.6 ) in to ( B.3 ), w e hav e V ar G ∼P [ f tri ( G )] = O ( n 3 p 3 + k 3 p 3 ε + k 4 p 4 log 2 (1 /p ) /d + k 5 p 6 ε 2 ) . Comparing this with ( B.2 ), for establishing ( B.1 ) it suffices to sho w that k 6 p 6 ε 2 ≫ n 3 p 3 + k 3 p 3 ε + k 4 p 4 log 2 (1 /p ) /d + k 5 p 6 ε 2 . (B.7) Clearly k 6 p 6 ε 2 ≫ k 5 p 6 ε 2 holds. Also, from Lemma 4.3 , we hav e ε = Ω(log 3 / 2 (1 /p ) / √ d ). Thus a sufficien t condition for ( B.7 ) is d ≪ k 6 p 3 log 3 (1 /p ) n 3 ∧ k 6 p 6 log 3 (1 /p ) and k 2 p 2 log(1 /p ) ≫ 1 . If p ≥ 1 /n then the first inequality on d is satisfied as long as d ≪ k 6 p 3 log 3 (1 /p ) /n 3 . The second inequalit y on k , p is satisfied as long as p ≫ 1 / ( k √ log k ). 40 B.2 T ypical b ehavior of signed w edge coun t (Lemma 4.5 ) Without loss of generality , let S = [ s ] and S 0 = [ k − ]. Throughout this subsection, w e alw ays consider the distribution of G to b e P [ s ] and omit the notation G ∼ P [ s ] for brevit y . V erifying ( 2.7 ) . W e b egin with the even t ( 2.7 ) on the range surrogate, whose complement has probabilit y at most (by union b ound and Mark ov’s inequalit y) X i B ≤ k 2 max i B ≤ k 2 max i σ 2 ) ≤ P ( X − E [ X ] > σ 2 / 2) ≤ 4V ar[ X ] /σ 4 . Th us, it suffices to prov e that σ 4 ≫ V ar[ X ]. As σ 2 is of order Ω( k 3 p 2 + k 4 p 4 log 2 (1 /p ) /d ), it suffices to sho w that ( k 3 p 2 ) 2 + k 4 p 4 log 2 (1 /p ) d 2 ≫ k 4 p 3 + k 5 p 6 log 3 d d + k 7 p 8 log 9 / 2 d d 3 / 2 . (B.15) 43 W e ev aluate this asymptotic inequality , for eac h term on the right hand side of ( B.15 ). F or the first term, ( k 4 p 4 log 2 (1 /p ) /d ) 2 ≫ k 4 p 3 is equiv alen t to d ≪ k 2 p 5 / 2 log 2 (1 /p ) . This holds due to the theorem’s assumption d ≪ k 2 p 3 log 3 (1 /p ), combined with p 1 / 2 log(1 /p ) = O (1). F or the remaining terms, by applying AM-GM inequalities on the left hand side of ( B.15 ) (with resp ectiv e weigh ts (1 / 2 , 1 / 2) , (1 / 4 , 3 / 4)), w e obtain that it is at least Ω k 7 p 6 log 2 (1 /p ) d ∨ k 15 / 2 p 7 log 3 (1 /p ) d 3 / 2 ! . F or this to dominate the remaining terms k 5 p 6 log 3 d d + k 7 p 8 log 9 / 2 d d 3 / 2 in ( B.15 ), it should b e that k ≫ log 3 / 2 d log(1 /p ) ∨ p 2 log 9 d log 6 (1 /p ) . F rom the condition p ≥ n − 1+ δ and d = e O ( k 2 p 3 ), it can b e observ ed that the right hand side is at most p olylogarithmic in n , whereas the left hand side in at least p olynomial in n . Th us for each fixed δ > 0, this holds for all sufficiently large n . B.2.1 V ariance of signed w edge coun t Here w e record the details on the earlier claim that ( B.13 ) is at most ( B.14 ). W ℓij term. W e hav e E X ℓ 0. Th us, for our purp ose, it suffices to find an appro ximation h ( y ) of the op erator norm ∥ y ∥ op and tak e the comp osition of the t w o functions, i.e., ϕ := g ◦ h . W e use the standard log-sum-exp function, which is smooth: h ( y ) := 1 β log(T r(exp( β y )) + T r(exp( − β y ))) , where β := 100 log(2 k ). As a function of eigenv alues, one can c heck that ∥ y ∥ op ≤ h ( y ) ≤ ∥ y ∥ op + 0 . 01. F urthermore, from ∂ ∂ y ij h ( y ) = 2 exp( β y ) − exp( − β y ) T r(exp( β y )) + T r(exp( − β y )) ij , i < j ∈ [ k ] , w e ha ve ∥∇ h ( y ) ∥ ≤ 2 exp( β y ) T r(exp( β y )) + T r(exp( − β y )) F + 2 exp( − β y ) T r(exp( β y )) + T r(exp( − β y )) F ≤ 4 , b ecause eac h matrix exp( ± β y ) / (T r(exp( β y )) + T r(exp( − β y ))) is p ositive semidefinite with trace at most 1. T o c hec k the prop erties (a)–(c) in Lemma C.1 : (a) and (b) are straightforw ard from the definition, and (c) follo ws from ∥∇ ϕ ( y ) ∥ = ∥∇ h ( y ) ∥ | g ′ ( h ( y )) | ≤ 4 C 0 . C.2 Decomp osition of likelihoo d ratio (Lemma 5.3 ) The statemen t is in tw o parts; the first is to identify the functions f i ( X ) for 1 ≤ i ≤ 3, and the second is to sho w their moment bounds as a function of N and d . Characterizing f i ( X ) . F rom the formula for densities w N ,d and m N ,d (see, e.g., [ RR19 , Section 2]) w e ha ve w 2 N ,d ( X ) /m 2 N ,d ( X ) = exp(2 α N ,d ( X )) , where for eigen v alues λ 1 , . . . , λ N of X , α N ,d ( X ) := 1 2 N X i =1 ( d − N − 1) log λ i − λ i + 1 2 d ( λ i − d ) 2 + N ( N + 3) 4 − dN 2 log 2 + N 2 log π + N ( N + 1) 4 log d − N X i =1 log Γ d + 1 − i 2 . 51 F rom Stirling’s form ula log Γ( z ) = ( z − 1 / 2) log z − z + (1 / 2) log(2 π ) + O (1 /z ), the last term can b e appro ximated as α N ,d ( X ) = 1 2 N X i =1 ( d − N − 1) log λ i − λ i + 1 2 d ( λ i − d ) 2 + N ( N + 1) 4 log d − 1 2 N X i =1 ( d − i ) log( d + 1 − i ) + 1 2 N X i =1 ( d + 1 − i ) + O N d . (C.11) Since N ≤ s ≤ ⌈ 1 . 1 k ⌉ , the O ( N/d ) term is of order at most O ( k /d ) = o (1). F rom log( d + 1 − i ) = log d + log 1 − i − 1 d = log d − i − 1 d − ( i − 1) 2 2 d 2 + O ( i − 1) 3 d 3 and 0 ≤ P N i =1 ( d − i )( i − 1) 3 /d 3 ≤ P N i =1 ( i − 1) 3 /d 2 = O ( k 4 /d 2 ) = o (1), the expansion ( C.11 ) can b e concisely written as α N ,d ( X ) = N X i =1 t ( λ i ) − N 3 12 d + o (1) , (C.12) where t ( x ) := 1 2 ( d − N − 1) log ( x/d ) − ( x − d ) + 1 2 d ( x − d ) 2 . No w consider the third-order T aylor expansion of t at x = d . Then t ( x ) = − N + 1 2 d ( x − d ) + N + 1 4 d 2 ( x − d ) 2 + d − N − 1 6 d 3 ( x − d ) 3 − d − N − 1 8 ξ 4 ( x − d ) 4 ≤ − N + 1 2 d ( x − d ) + N + 1 4 d 2 ( x − d ) 2 + d − N − 1 6 d 3 ( x − d ) 3 , where ξ is b et ween x and d , and d ≫ k 2 implies d > N + 1. F rom now on, it is more con v enient to consider the affine transformation Y of X , defined as Y := ( X − dI N ) / √ d . Then for X ∼ m N ,d , Y ii ∼ N (0 , 2) , i ∈ [ N ] and Y ij = Y j i ∼ N (0 , 1) , i < j ∈ [ N ] indep enden tly . F urthermore, X ∈ E N ⇔ Y ∈ F N , where F N := n Y ∈ R N × N : ∥ Y Q × Q ∥ op ≤ 10 p | Q | (1 + p log s ) for all ∅ ⊊ Q ⊆ [ N ] o . Plugging in the upp er bound on t to ( C.12 ) yields α N ,d ( X ) ≤ − N + 1 2 d 1 / 2 N X i =1 µ i + N + 1 4 d N X i =1 µ 2 i + d − N − 1 6 d 3 / 2 N X i =1 µ 3 i + o (1) , = − N + 1 2 d 1 / 2 T r( Y ) + N + 1 4 d T r( Y 2 ) + d − N − 1 6 d 3 / 2 T r( Y 3 ) + o (1) , (C.13) where µ 1 , . . . , µ N are eigen v alues of Y . F rom ( C.13 ) for ( 5.10 ) w e ha v e exp(2 α N ,d ( X )) 1 { X ∈ E N } = exp(2 α N ,d ( X )) 1 { Y ∈ F N } ≤ (1 + o (1)) exp − N + 1 d 1 / 2 T r( Y ) | {z } =: f 1 ( X ) exp N + 1 2 d T r( Y 2 ) | {z } =: f 2 ( X ) exp d − N − 1 3 d 3 / 2 T r( Y 3 ) 1 { Y ∈ F N } | {z } =: f 3 ( X ) . Here, w e iden tified f i ( X ) for 1 ≤ i ≤ 3 as exp onen tiated traces of p o wers of Y . 52 Calculating exp ectations. Given their definitions, w e show that f 1 ( X ) through f 3 ( X ) has exp ectation (ov er X ∼ m N ,d ) at most exp( O ( N 3 /d )). Crucial to those calculations is the concen- tration of traces of GOE (Lemma A.2 ). • F or f 1 ( X ), we ha ve T r( Y ) ∼ N (0 , 2 N ). Th us from the momen t generating function of normal distribution, E X ∼ m N ,d [ f 1 ( X ) 3 ] = exp 9( N + 1) 2 2 d × 2 N = exp O N 3 d . • F or f 2 ( X ), T r( Y 2 ) concen trates around N ( N + 1) with sub exp onen tial tail (with norm ∥·∥ ψ 1 = O ( N )) b y Lemma A.2 . By standard conv ersion from subexp onen tial concen tration to momen t generating function [ V er18 , Prop osition 2.7.1], E X ∼ m N ,d [ f 2 ( X ) 3 ] ≤ exp 3 N ( N + 1) 2 2 d + 3( N + 1) 2 d 2 × O ( N 2 ) ! = exp O N 3 d . Note that here we used N 4 /d 2 = O ( k 4 /d 2 ) = o (1) and N 4 /d 2 ≤ ( N 3 /d ) × O ( k /d ) = o ( N 3 /d ). • F or f 3 ( X ), first from exp( x ) ≤ 1 + x + ( x 2 / 2) exp( | x | ) w e hav e E X ∼ m N ,d f 3 ( X ) 3 = E X ∼ m N ,d exp d − N − 1 d 3 / 2 T r( Y 3 ) 1 { Y ∈ F N } ≤ 1 + 1 2 E X ∼ m N ,d " ( d − N − 1)T r( Y 3 ) d 3 / 2 2 exp ( d − N − 1) | T r( Y 3 ) | d 3 / 2 1 { Y ∈ F N } # ≤ 1 + 1 2 d q E X ∼ m N ,d [T r( Y 3 ) 4 ] s E X ∼ m N ,d exp 2 | T r( Y 3 ) | d 1 / 2 1 { Y ∈ F N } ≤ 1 + O N 3 d × s E X ∼ m N ,d exp 2 | T r( Y 3 ) | d 1 / 2 1 { Y ∈ F N } . (C.14) Here, for the second inequality we used that T r( Y 3 ) 1 { Y ∈ F N } has mean 0, as each Y ij is symmetric around 0 (hence also after symmetric truncation Y ∈ F N ); the third inequalit y is b y Cauch y-Sch warz, with 0 ≤ ( d − N − 1) /d 3 / 2 ≤ 1 /d 1 / 2 ; the final inequality is from Gaussian h yp ercon tractivity p E [(T r( Y 3 )) 4 ] ≲ E [(T r( Y 3 )) 2 ] = O ( N 3 ). Note that for Y ∈ F N , w e ha ve | T r( Y 3 ) | ≤ N ∥ Y ∥ 3 op ≤ N × (10 √ N (1 + p log s )) 3 ≤ C 0 N 5 / 2 log 3 / 2 s , where the first inequality follows from | P N i =1 µ 3 i | ≤ N max 1 ≤ i ≤ N | µ i | 3 , and the last inequalit y 53 holds for some constan t C 0 > 0. Thus, E X ∼ m N ,d h exp((2 /d 1 / 2 ) | T r( Y 3 ) | ) 1 { Y ∈ F } i ≤ Z exp(2 C 0 N 5 / 2 log 3 / 2 s/d 1 / 2 ) 0 P X ∼ m N ,d (exp((2 /d 1 / 2 ) | T r( Y 3 ) | ) ≥ u ) du ≤ 1 + 2 r N 3 d Z C 0 N log 3 / 2 s 0 P X ∼ m N ,d ( | T r( Y 3 ) | ≥ N 3 / 2 u ) exp 2 u r N 3 d ! du ≤ 1 + 4 r N 3 d Z N 3 / 4 0 exp − 1 C A. 2 u 2 + 2 u r N 3 d ! du + 4 r N 3 d Z C 0 N log 3 / 2 s N 3 / 4 exp − N u 2 / 3 C A. 2 + 2 u r N 3 d ! du ≤ 1 + O r N 3 d ! exp O N 3 d + 4 r N 3 d Z C 0 N log 3 / 2 s N 3 / 4 exp − N u 2 / 3 C A. 2 + 2 u r N 3 d ! du , (C.15) where the second inequality follows from the change of v ariables v = exp((2 N 3 / 2 /d 1 / 2 ) u ), and the third inequalit y holds b y Corollary A.2 (splitting the in tegral at u = N 3 / 4 , where the tail behavior changes). Here, note that the function u 7→ exp( − N u 2 / 3 /C A. 2 + 2 u p N 3 /d ) for u ≥ 0 is decreasing for u ≤ ( p d 3 / N 3 ) / (27 C 3 A. 2 ) and increasing afterward s. Hence, the maxim um of this function ov er u ∈ [ N 3 / 4 , C 0 N log 3 / 2 s ] is obtained at the b oundary which has v alue exp( − N 3 / 2 /C A. 2 + 2 N 9 / 4 / √ d ) ∨ exp( − ( C 2 / 3 0 /C A. 2 ) N 5 / 3 log s + 2 C 0 N 5 / 2 log 3 / 2 s/ √ d ) = exp − N 3 / 2 C A. 2 1 − O N 3 / 4 √ d !!! ∨ exp − C 2 / 3 0 C A. 2 ! N 5 / 3 log s 1 − O N 5 / 6 log 1 / 2 s √ d !!! ≤ exp − N 3 / 2 2 C A. 2 ! ∨ exp − C 2 / 3 0 2 C A. 2 N 5 / 3 log s ! , where the inequality holds for all sufficiently large k , as N = O ( k ) implies N 3 / 4 / √ d = o (1) and N 5 / 6 log 1 / 2 s/ √ d = o (1) for d ≫ k 2 . Then, it follows Z C 0 N log 3 / 2 s N 3 / 4 exp − N u 2 / 3 + 2 u r N 3 d ! du ≤ C 0 N log 3 / 2 s exp − N 3 / 2 2 C A. 2 ! ∨ exp − C 2 / 3 0 2 C A. 2 N 5 / 3 log s !! = O log 3 / 2 s N ! . (C.16) By ( C.14 ), ( C.15 ) and ( C.16 ), we obtain E X ∼ m N ,d [ f 3 ( X ) 3 ] ≤ 1 + O N 3 d 1 + O r N 3 d ! exp O N 3 d + O r N d log 3 / 2 k !! ≤ 1 + O N 3 d 1 + o (1) + O r N 3 d ! exp O N 3 d ! ≤ exp O N 3 d , 54 where the second inequality is from O ( p N /d log 3 / 2 k ) = o (1) given that N = O ( k ) and d ≫ k 2 , and the last inequality is from 1 + x (2 + √ xe x ) ≤ 1 + 2 x + xe 2 x ≤ 1 + 2 x + e 2 x ( e x − 1) ≤ e 3 x for all x ≥ 0. C.3 Upp er b ound on cub ed hypergeometric (Lemma 5.4 ) Let C 0 > 0 b e arbitrary and consider an y fixed s ∈ [ k − , k + ]. Then the conditional distribution of N = | S ∩ S ′ | given | S | = | S ′ | = s is Hyp ergeom( n, s, s ), whic h is sto c hastically dominated by M ∼ Binom( s, s/ ( n − s )). Then E N | S | = | S ′ | = s [exp( C 0 N 3 /d )] ≤ E [exp( C 0 M 3 /d )] ≤ exp 64 C 0 s 6 n 3 d + Z s 3 64 s 6 /n 3 P ( M ≥ u 1 / 3 ) C 0 d exp C 0 u d du ≤ exp 64 C 0 s 6 n 3 d + Z s 3 64 s 6 /n 3 P ( M − E [ M ] ≥ (1 / 2) u 1 / 3 ) C 0 d exp C 0 u d du ≤ exp 64 C 0 s 6 n 3 d + C 0 d Z s 3 64 s 6 /n 3 exp( − u 1 / 3 / 100 + C 0 u/d ) du , where the second and third inequalities are from E [ M ] = s 2 / ( n − s ) ≤ 2 s 2 /n ≤ (1 / 2) u 1 / 3 for u ∈ [64 s 6 /n 3 , s 3 ] and Chernoff b ound. F or all such u , since C 0 u/d ≤ C 0 u 1 / 3 ( k + ) 2 /d where ( k + ) 2 /d = o (1), there exists a constant C 1 > 0 that only depends on C 0 suc h that for all sufficiently large k , exp( − u 1 / 3 / 100 + C 0 u/d ) ≤ exp( − u 1 / 3 /C 1 ) . Th us w e hav e E N | S | = | S ′ | = s [exp( C 0 N 3 /d )] ≤ exp 64 C 0 s 6 n 3 d + C 0 d Z s 3 64 s 6 /n 3 exp( − u 1 / 3 /C 1 ) du ≤ exp 64 C 0 s 6 n 3 d + 3 C 0 d ( C 1 (64 s 6 /n 3 ) 2 / 3 + 2 C 2 1 (64 s 6 /n 3 ) 1 / 3 + 2 C 3 1 ) exp( − 4 s 2 / ( nC 1 )) ≤ exp 64 C 0 ( k + ) 6 n 3 d + 3 C 0 C 1 64( k + ) 6 n 3 d 2 / 3 + 2 C 2 1 64( k + ) 6 n 3 d 1 / 3 + 2 C 3 1 d ! = 1 + o (1) , as desired. Here, the second inequality is from R ∞ b exp( − u 1 / 3 /a ) du = 3( ab 2 / 3 +2 a 2 b 1 / 3 +2 a 3 ) exp( − b 1 / 3 /a ), and the third inequality is from (1 /d ) x 2 / 3 ≤ ( x/d ) 2 / 3 , (1 /d ) x 1 / 3 ≤ ( x/d ) 1 / 3 , exp( − 4 s 2 / ( nC 1 )) ≤ 1 with s ≤ k + = ⌈ 1 . 1 k ⌉ . The final line follows from the assumption d ≫ k 2 ∨ k 6 /n 3 . 55 C.4 T ypical b ehavior of neigh b orhoo d distributions (Lemma 5.5 ) Recall that U = ( U 1 , . . . , U n − 1 ) , V = ( V 1 , . . . , V n − 1 ). The probability P ((Γ , U, V ) ∈ E c ) (regardless of Γ ∼ P n ( ·| X [ n − 1] ) or Q n ) is upp er bounded by P X [ n − 1] , Γ n − 1 X i =1 V i > 2 k ! | {z } (I) + P X [ n − 1] , Γ X i ∈ [ n − 1]: V i =1 Γ i > 4 kp, n − 1 X i =1 V i ≤ 2 k | {z } (II) + P X [ n − 1] , Γ | ∆(Γ , U, V ) | > k n , n − 1 X i =1 V i ≤ 2 k, X i ∈ [ n − 1]: V i =1 Γ i ≤ 4 kp | {z } (II I) . W e sho w that each term is o (1 / ( n 2 log(1 /p ))); the follo wing analysis for the first t wo terms (I) and (I I) apply for both Γ ∼ P n ( ·| X [ n − 1] ) and Γ ∼ Q n . Since P n − 1 i =1 V i ∼ Binom( n − 1 , k/n ), (I) is at most exp( − k / 3) by standard Chernoff b ound. This is o (1 / ( n 2 log(1 /p ))) as long as k ≳ log n . F or (I I), first note that for any V , Γ follo ws Ber( p ) ⊗ ( n − 1) . Thus P i ∈ [ n − 1]: V i =1 Γ i ∼ Binom( P n − 1 i =1 V i , p ) conditioned on V , whic h is sto c hastically dominated by Binom(2 k , p ) under the ev en t { P n − 1 i =1 V i ≤ 2 k } . Thus, (I I) is at most exp( − 2 kp/ 3) again by Chernoff bound; this is o (1 / ( n 2 log(1 /p ))) as long as k p ≳ log n . F or (I II), first consider the case where Γ ∼ Q n . Let ν b e the n umber of i ∈ [ n − 1] with V i = 1 (i.e., v ertices included in the communit y), and i 1 < · · · < i ν b e such indices. Then b y Lemma A.4 , the probabilit y conditioned on Γ and V is at most exp − 1 C A. 4 d M log (1 /p ) log ( d/p ) + C A. 4 log(3 k ) , where M = M ( ν, p, (Γ i 1 , . . . , Γ i ν )) = (( P ν j =1 Γ i j ) log(1 /p ) + ν p + log ( d/p ))( P ν j =1 Γ i j + ν p ) ≤ C 0 k 2 p 2 log(1 /p ) log ( d/p ), for some constant C 0 > 0 from ν ≤ 2 k , P ν j =1 Γ i j ≤ 4 k p and k p ≥ 1. Th us, (I II) is at most exp − 1 C A. 4 d C 0 ( k p log (1 /p ) log ( d/p )) 2 + C A. 4 log(3 k ) , (C.17) whic h is o (1 / ( n 2 log(1 /p ))) as long as d ≳ ( k p log (1 /p ) log ( d/p )) 2 log n . No w we consider (II I) with Γ ∼ P n ( ·| X [ n − 1] ). First, (I II) conditioned on V (with ν ≤ 2 k ) is equal to 56 P U i 1 ,...,U i ν , (Γ i 1 ,..., Γ i ν ) ∼ e P ν +1 ( ·| U i 1 ,...,U i ν ) | ∆(Γ , U, V ) | > k n , ν X j =1 Γ i j ≤ 4 kp = E U i 1 ,...,U i ν , (Γ i 1 ,..., Γ i ν ) ∼Q ν +1 1 | ∆(Γ , U, V ) | > k n , ν X j =1 Γ i j ≤ 4 kp e P ν +1 (Γ i 1 , . . . , Γ i ν | U i 1 , . . . , U i ν ) p P ν j =1 Γ i j (1 − p ) ν − P ν j =1 Γ i j ≤ E U i 1 ,...,U i ν , (Γ i 1 ,..., Γ i ν ) ∼Q ν +1 1 | ∆(Γ , U, V ) | > k n , ν X j =1 Γ i j ≤ 4 kp 1 / 2 × E U i 1 ,...,U i ν , (Γ i 1 ,..., Γ i ν ) ∼Q ν +1 e P 2 ν +1 (Γ i 1 , . . . , Γ i ν | U i 1 , . . . , U i ν ) p 2 P ν j =1 Γ i j (1 − p ) 2( ν − P ν j =1 Γ i j ) 1 ν X j =1 Γ i j ≤ 4 kp 1 / 2 ≤ exp − 1 2 C A. 4 d C 0 ( k p log (1 /p ) log ( d/p )) 2 + C A. 4 2 log(3 k ) × E U i 1 ,...,U i ν , (Γ i 1 ,..., Γ i ν ) ∼Q ν +1 e P 2 ν +1 (Γ i 1 , . . . , Γ i ν | U i 1 , . . . , U i ν ) p 2 P ν j =1 Γ i j (1 − p ) 2( ν − P ν j =1 Γ i j ) 1 ν X j =1 Γ i j ≤ 4 kp 1 / 2 , (C.18) where the first inequality is from Cauch y-Sc h w arz, and the sec ond inequality is from ( C.17 ) with k p ≥ 1. As the notation i 1 , . . . , i ν reads complicated, without loss of generalit y w e c hange those to simpler indices. Note that e P 2 ν +1 (Γ i 1 , . . . , Γ i ν | U i 1 , . . . , U i ν ) p 2 P ν j =1 Γ i j (1 − p ) 2( ν − P ν j =1 Γ i j ) 1 ν X j =1 Γ i j ≤ 4 kp o v er U i 1 , . . . , U i ν , (Γ i 1 , . . . , Γ i ν ) ∼ Q ν +1 (with i 1 < · · · < i ν b eing the indices in [ n − 1] with V i = 1) has the same distribution as e P 2 ν +1 (Γ [ ν ] | U [ ν ] ) Q 2 ν +1 (Γ [ ν ] ) 1 ( ν X i =1 Γ i ≤ 4 kp ) o v er U [ ν ] , Γ [ ν ] ∼ Q ν +1 (with [ ν ] b eing the indices in [ n − 1] with V i = 1) due to symmetry; recall that Γ [ ν ] = (Γ 1 , . . . , Γ ν ) and U [ ν ] = ( U 1 , . . . , U ν ). Hence for the second factor in the last term of ( C.18 ), with the corresp onding c hange in V w e hav e E U i 1 ,...,U i ν , (Γ i 1 ,..., Γ i ν ) ∼Q ν +1 e P 2 ν +1 (Γ i 1 , . . . , Γ i ν | U i 1 , . . . , U i ν ) p 2 P ν j =1 Γ i j (1 − p ) 2( ν − P ν j =1 Γ i j ) 1 ν X j =1 Γ i j ≤ 4 kp = E U [ ν ] , Γ [ ν ] ∼Q ν +1 " e P 2 ν +1 (Γ [ ν ] | U [ ν ] ) Q 2 ν +1 (Γ [ ν ] ) 1 ( ν X i =1 Γ i ≤ 4 kp )# . No w the main technical p ortion lies in controlling the term E U [ ν ] , Γ [ ν ] ∼Q ν +1 " e P 2 ν +1 (Γ [ ν ] | U [ ν ] ) Q 2 ν +1 (Γ [ ν ] ) 1 ( ν X i =1 Γ i ≤ 4 kp )# . (C.19) 57 F or the rest of the pro of, w e will show that this term is O (1). If this holds, then the last term in ( C.18 ) is indeed o (1 / ( n 2 log(1 /p ))) for d ≳ ( k p log (1 /p ) log ( d/p )) 2 log n . W e mention that a na ¨ ıv e application of Lemma A.4 is not sufficien t for controlling ( C.19 ) within our desired regime. In particular, the squared likelihoo d ratio e P 2 ν +1 / Q 2 ν +1 can b e as large as exp( e Ω( k p )), and dominating this with the b ound exp( − d/ e Ω( k 2 p 2 )) in Lemma A.4 and ( C.18 ) requires d = e Ω( k 3 p 3 ). Our strategy is to directly b ound the second momen t of the lik eliho o d ratio, instead of controlling ( C.19 ) from the concentration. This is done by using the martingale structure of e P ν +1 / Q ν +1 , where w e recursiv ely b ound the curren t step’s momen t with the previous step’s moment b ound and martingale difference’s moment b ound (see, e.g., ( C.26 )). By iterating this, w e sho w that ( C.19 ) is at most exp( e O ( k 2 p 2 /d )) whic h is O (1) for d = e Ω( k 2 p 2 ). F rom no w on, we further condition on Γ [ ν ] (with P ν i =1 Γ i ≤ 4 k p ). As notation, let ρ be the uniform probability measure on S d − 1 . Also, for an y distribution µ on S d − 1 , denote ∥ µ ∥ ∞ := sup x | ( dµ/dρ )( x ) | . In particular, if µ = ρ ( · ∩ L ) /ρ ( L ) for a measurable set L ⊆ S d − 1 , w e hav e ∥ µ ∥ ∞ = 1 /ρ ( L ). W e begin with the follo wing lemma, whic h will later characterize the concentration (and hence con trol the momen t) of each “martingale difference”, as will be defined shortly . Lemma C.2 ([ LMSY22 , Corollary 4.9]) . Ther e exists a c onstant C C. 2 > 0 such that the fol lowing holds: let µ b e a distribution on S d − 1 , and for z ∈ S d − 1 let X ( z ) := P x ∼ µ ( ⟨ x, z ⟩ > τ ( p, d )) . F or any 0 ≤ s ≤ 1 , P z ∼ ρ ( | X ( z ) − p | > ps ) ≤ 2 exp − ds 2 C C. 2 log(1 /p ) log ( d/p )(log ∥ µ ∥ ∞ + log ( d/p )) . W e use the same martingale as in [ LMSY22 , Observ ation 5.3]. Given the sequence Γ i , i ∈ [ ν ] from conditioning, define the following sequence of random sets E i , i ∈ [ ν ] of p -c aps (when Γ i = 1) and p -antic aps (when Γ i = 0) as E i := ( { z ∈ S d − 1 : ⟨ U i , z ⟩ ≥ τ ( p, d ) } Γ i = 1 , { z ∈ S d − 1 : ⟨ U i , z ⟩ < τ ( p, d ) } Γ i = 0 . Note that among E i , P ν i =1 Γ i of those are p -caps and ν − P ν i =1 Γ i of those are p -an ticaps. Now for 0 ≤ t ≤ ν , define the follo wing quan tit y R t := ρ ( L t ) Q t i =1 ρ ( E i ) = ρ ( L t ) p P t i =1 Γ i (1 − p ) t − P t i =1 Γ i , where R 0 := 1 and L t := ∩ t i =1 E i , with L 0 := S d − 1 ; note that the equalit y follows from the definition of each E i . By [ LMSY22 , Observ ation 5.3], { R t } is a martingale with resp ect to the filtration F t := σ ( { U 1 , . . . , U t } ). F urthermore, by definition w e hav e e P ν +1 (Γ [ ν ] | U [ ν ] ) Q ν +1 (Γ [ ν ] ) | Γ [ ν ] d = R ν . (C.20) Th us, it suffices to control the second momen t of R ν . This is done by factorizing R ν as a pro duct of (m ultiplicativ e) martingale differences, and analyzing each martingale difference using Lemma C.2 . Note that this is differen t from the approach in [ LMSY22 , Lemma 5.1], where R ν is expressed as a sum of (additiv e) martingale differences. F ormally , we ha v e R ν = R 0 ν Y i =1 φ i , 58 where for i ∈ [ ν ], φ i := R i /R i − 1 = ρ ( E i ∩ L i − 1 ) ρ ( E i ) ρ ( L i − 1 ) . The next step is to build recursive inequalities betw een E [ R 2 t ] and E [ R 2 t − 1 ]. F or any t ∈ [ ν ], E [ R 2 t ] = E [ R 2 t − 1 E [ φ 2 t |F t − 1 ]] = E [ R 2 t − 1 + R 2 t − 1 E [( φ 2 t − 1) |F t − 1 ]] = E [ R 2 t − 1 + R 2 t − 1 E [( φ t − 1) 2 |F t − 1 ]] , (C.21) where the last equalit y follows from E [ φ t |F t − 1 ] = 1. Case 1: Γ t = 1 . First, consider the case when Γ t = 1, i.e., E t is a p -cap. If R t − 1 ≥ a (the v alue of a will b e determined later), then ρ ( L t − 1 ) = R t − 1 t − 1 Y i =1 ρ ( E i ) ≥ ap P ν i =1 Γ i (1 − p ) ν − P ν i =1 Γ i , whic h implies ∥ µ ∥ ∞ = 1 /ρ ( L t − 1 ) ≤ 1 / ( ap P ν i =1 Γ i (1 − p ) ν − P ν i =1 Γ i ) . (C.22) Then b y applying Lemma C.2 with µ = ρ ( ·| L t − 1 ) /ρ ( L t − 1 ), on { R t − 1 ≥ a } ∈ F t − 1 w e ha ve E [( φ t − 1) 2 |F t − 1 ] 1 { R t − 1 ≥ a } ≤ Z (1 /p ) 2 0 P (( φ t − 1) 2 > s |F t − 1 ) ds 1 { R t − 1 ≥ a } = Z 1 /p 0 2 u P ( | φ t − 1 | > u |F t − 1 ) du 1 { R t − 1 ≥ a } ≤ Z 1 0 4 u exp − du 2 C C. 2 log(1 /p ) log ( d/p ) λ a du + 2 p 2 exp − d C C. 2 log(1 /p ) log ( d/p ) λ a 1 { R t − 1 ≥ a } ≤ C C. 2 log(1 /p ) log ( d/p ) λ a d + 2 p 2 exp − d C C. 2 log(1 /p ) log ( d/p ) λ a 1 { R t − 1 ≥ a } , (C.23) where λ a := log ∥ µ ∥ ∞ + log ( d/p ); the first inequalit y follows from φ t ≤ 1 /p , the second inequality follo ws from P ( | φ t − 1 | > u |F t − 1 ) = P ( | X ( z ) − p | > pu ) in Lemma C.2 (for u ∈ [1 , 1 /p ] we simply use the b ound for u = 1). Note that by ( C.22 ), λ a ≤ log(1 /a ) + ν X i =1 Γ i ! log(1 /p ) + ν − ν X i =1 Γ i ! log(1 / (1 − p )) + log ( d/p ) ≤ log(1 /a ) + 10 kp log (1 /p ) + log ( d/p ) =: λ ′ a , (C.24) from ν ≤ 2 k and P ν i =1 Γ i ≤ 4 kp , along with log (1 / (1 − p )) ≤ 2 p and log(1 /p ) ≥ 2 / 3. In particular, while λ a itself dep ends on t , the last term λ ′ a in ( C.24 ) do es not depend on t . On the other hand, on { R t − 1 < a } ∈ F t − 1 w e ha ve E [ R 2 t 1 { R t − 1 < a } ] = E [ R 2 t − 1 E [ φ 2 t |F t − 1 ] 1 { R t − 1 < a } ] ≤ a 2 /p 2 , (C.25) from φ t ≤ 1 /p . Combining ( C.23 ) and ( C.25 ) for ( C.21 ), for Γ t = 1 w e ha ve E [ R 2 t ] = E [ R 2 t ( 1 { R t − 1 ≥ a } + 1 { R t − 1 < a } )] ≤ E [ R 2 t − 1 ](1 + η a ) + a 2 p 2 , (C.26) where η a := C C. 2 log(1 /p ) log ( d/p ) λ ′ a d + 2 p 2 exp − d C C. 2 log(1 /p ) log ( d/p ) λ ′ a . (C.27) 59 Case 2: Γ t = 0 . The bound for the case Γ t = 0 can be obtained similarly as in the first case. On { R t − 1 ≥ a } , E [( φ t − 1) 2 |F t − 1 ] 1 { R t − 1 ≥ a } ≤ Z 1 0 2 u P ( | φ t − 1 | > u |F t − 1 ) du 1 { R t − 1 ≥ a } ≤ Z p/ (1 − p ) 0 4 u exp − d (1 − p ) 2 u 2 C C. 2 p 2 log(1 /p ) log ( d/p ) λ ′ a du 1 { R t − 1 ≥ a } + Z 1 p/ (1 − p ) 4 u exp − d C C. 2 log(1 /p ) log ( d/p ) λ ′ a du 1 { R t − 1 ≥ a } ≤ 2 C C. 2 p 2 log(1 /p ) log ( d/p ) λ ′ a d (1 − p ) 2 + 4 exp − d C C. 2 log(1 /p ) log ( d/p ) λ ′ a 1 { R t − 1 ≥ a } ≤ 8 C C. 2 p 2 log(1 /p ) log ( d/p ) λ ′ a d + 4 exp − d C C. 2 log(1 /p ) log ( d/p ) λ ′ a 1 { R t − 1 ≥ a } , where the first inequalit y is from | φ t − 1 | ≤ 1 ∨ p/ (1 − p ) ≤ 1, and the second inequality is from Lemma C.2 with µ = ρ ( ·| L t − 1 ) /ρ ( L t − 1 ), where P ( | φ t − 1 | > u |F t − 1 ) = P ( | X ( z ) − p | > (1 − p ) u ) (applied for u < p/ (1 − p ); for u ∈ [ p/ (1 − p ) , 1], the b ound for u = p/ (1 − p ) is used); the final inequalit y is from p ≤ 1 / 2. On { R t − 1 < a } ∈ F t − 1 , w e ha ve E [ R 2 t 1 { R t − 1 < a } ] = E [ R 2 t − 1 E [ φ 2 t |F t − 1 ] 1 { R t − 1 < a } ] ≤ a 2 / (1 − p ) 2 ≤ 4 a 2 . Com bining these as in ( C.26 ), we ha ve E [ R 2 t ] ≤ E [ R 2 t − 1 ](1 + θ a ) + 4 a 2 , (C.28) where θ a := 8 C C. 2 p 2 log(1 /p ) log ( d/p ) λ ′ a d + 4 exp − d C C. 2 log(1 /p ) log ( d/p ) λ ′ a . (C.29) No w b y successively applying ( C.26 ) and ( C.28 ) for t = ν, ν − 1 , · · · , 1, we ha ve (recall E [ R 2 0 ] = 1) E [ R 2 ν ] ≤ (1 + η a ) P ν i =1 Γ i (1 + θ a ) ν − P ν i =1 Γ i 1 + ν X i =1 Γ i ! a 2 p 2 + ν − ν X i =1 Γ i ! 4 a 2 ! ≤ exp ν X i =1 Γ i ! η a + ν − ν X i =1 Γ i ! θ a ! × 1 + ν X i =1 Γ i ! a 2 p 2 + ν − ν X i =1 Γ i ! 4 a 2 ! ≤ exp(4 kpη a + 2 k θ a ) × 1 + 4 k a 2 p + 8 k a 2 , where the second inequalit y is from 1 + x ≤ exp( x ), and the last inequality is from ν ≤ 2 k , P ν i =1 Γ i ≤ 4 k p . Finally , set a = p/k . Then as λ ′ a = log( dk /p 2 ) + 10 kp log (1 /p ), w e hav e E [ R 2 ν ] ≤ exp C 1 k p log (1 /p ) log ( d/p ) λ ′ a d + C 1 k p exp − d C 1 log(1 /p ) log ( d/p ) λ ′ a × (1 + C 1 p/k ) , 60 for some constan t C 1 > 0, follo wing from the definitions of η a and θ a resp ectiv ely from ( C.27 ) and ( C.29 ). The last term (and hence ( C.19 ), from ( C.20 )) is O (1), as long as d ≳ k p log (1 /p ) log ( d/p ) λ ′ a = k p log (1 /p ) log ( d/p )(10 k p log (1 /p ) + log( dk /p 2 )) and k p ≳ log n . Com bining all lo wer bounds on d and k p for terms (I)–(I II), w e ha v e that Lemma 5.5 holds if k p ≥ C 5 . 5 log n and d ≥ C 5 . 5 ( k p log (1 /p ) log ( d/p )) 2 log n , for an appropriate c hoice of the constant C 5 . 5 > 0, as desired. D Deferred pro ofs in Section 6 D.1 Tigh t b ounds on signed cycle counts (Prop osition 6.1 ) Our proof strategy for Proposition 6.1 is rather straigh tforward (despite in volving tec hnical calcula- tions), starting b y writing down the exp ectation of signed subgraph with respect to an appropriate orthonormal basis for the laten ts U 1 , . . . , U ℓ . The orthonormalit y substantially simplifies the ex- pression, reducing it to a tractable sum of combinatorial ob jects. D.1.1 Gegen bauer p olynomials and spherical harmonics Here w e presen t several key facts on the orthonormal basis used for the calculation. These can b e found in textb ooks on harmonic analysis, e.g., [ DX13 ]; for a summary , see [ LS23 , Section 3 & Lemma 4.10]. F or indep enden t U 1 , U 2 ∼ U ( S d − 1 ), the distribution µ of ⟨ U 1 , U 2 ⟩ is giv en as µ ( dx ) = Γ( d/ 2) Γ(( d − 1) / 2) √ π (1 − x 2 ) ( d − 3) / 2 dx, x ∈ [ − 1 , 1] . The p olynomials q 0 , q 1 , . . . that are orthonormal in L 2 ( µ ) are known as Gegenbauer p olynomials. The first few p olynomials are giv en as: q 0 ( x ) = 1 , q 1 ( x ) = √ dx, q 2 ( x ) = 1 √ 2 r d + 2 d − 1 ( dx 2 − 1) . F urthermore, these p olynomials satisfy the follo wing recursiv e prop ert y: q m +1 ( x ) = s (2 m + d )(2 m + d − 2) ( m + 1)( m + d − 2) xq m ( x ) − s m ( m + d − 3)( m + d/ 2) ( m + 1)( m + d − 2)( m + d/ 2 − 2) q m − 1 ( x ) (D.1) The Gegen bauer p olynomials admit further decomp osition in to spherical harmonics, whic h are orthonormal with resp ect to the distribution of U 1 . Namely , there exists a set of functions { ϕ m,t : m ≥ 0 , t ∈ [ N m ] } suc h that E U 1 [ ϕ m,t ( U 1 ) ϕ m ′ ,t ′ ( U 1 )] = 1 { m = m ′ , t = t ′ } , and q m ( ⟨ U 1 , U 2 ⟩ ) = 1 √ N m X t ∈ [ N m ] ϕ m,t ( U 1 ) ϕ m,t ( U 2 ) . Here, N m denotes the num b er of distinct degree- m spherical harmonics (corresp onding to S d − 1 ), whic h satisfies N 0 = 1 , N m = d + 2 m − 2 m d + m − 3 m − 1 , m ≥ 1 . 61 Because 1 {· ≥ τ ( p, d ) } ∈ L 2 ( µ ), w e can write as 1 {⟨ U 1 , U 2 ⟩ ≥ τ ( p, d ) } = ∞ X m =0 c m q m ( ⟨ U 1 , U 2 ⟩ ) = ∞ X m =0 c m √ N m N m X t =1 ϕ m,t ( U 1 ) ϕ m,t ( U 2 ) , (D.2) where c m := ⟨ 1 {· ≥ τ ( p, d ) } , q m ⟩ L 2 ( µ ) . D.1.2 Tigh t b ounds on signed cycle coun ts After establishing these facts, w e mov e on to pro ving Prop osition 6.1 . Recall the main quan tity of in terest: E G ∼G ( n,p,d ) Y ij ∈ E (Cyc ℓ ) ( G ij − p ) . First, note that an y strict subgraph of Cyc ℓ is a forest. Thus by Corollary 4.2 , E G ∼G ( n,p,d ) Y ij ∈ E (Cyc ℓ ) G ij − p ℓ = E G ∼G ( n,p,d ) Y ij ∈ E (Cyc ℓ ) ( G ij − p ) . (D.3) Then b y ( D.2 ), E G ∼G ( n,p,d ) Y ij ∈ E (Cyc ℓ ) G ij = E U 1 ,...,U ℓ Y ij ∈ E (Cyc ℓ ) 1 {⟨ U i , U j ⟩ ≥ τ ( p, d ) } = E U 1 ,...,U ℓ Y ij ∈ E (Cyc ℓ ) ∞ X m =0 c m √ N m X t ∈ [ N m ] ϕ m,t ( U i ) ϕ m,t ( U j ) = X m 1 ,...,m ℓ ≥ 0 c m 1 . . . c m ℓ p N m 1 . . . N m ℓ X t 1 ∈ [ N m 1 ] ,...,t ℓ ∈ [ N m ℓ ] E U 1 ,...,U ℓ [ ϕ m 1 ,t 1 ( U 1 ) ϕ m 1 ,t 1 ( U 2 ) . . . ϕ m ℓ ,t ℓ ( U ℓ ) ϕ m ℓ ,t ℓ ( U 1 )] , where eac h summand satisfies (by the orthonormalit y of spherical harmonics) E U 1 ,...,U ℓ [ ϕ m 1 ,t 1 ( U 1 ) ϕ m 1 ,t 1 ( U 2 ) . . . ϕ m ℓ ,t ℓ ( U ℓ ) ϕ m ℓ ,t ℓ ( U 1 )] = E U 1 [ ϕ m ℓ ,t ℓ ( U 1 ) ϕ m 1 ,t 1 ( U 1 )] . . . E U ℓ [ ϕ m ℓ − 1 ,t ℓ − 1 ( U ℓ ) ϕ m ℓ ,t ℓ ( U ℓ )] = 1 { m ℓ = m 1 , t ℓ = t 1 } · · · 1 { m ℓ − 1 = m ℓ , t ℓ − 1 = t ℓ } = 1 { m 1 = · · · = m ℓ , t 1 = · · · = t ℓ } . Th us, w e obtain E G ∼G ( n,p,d ) Y ij ∈ E (Cyc ℓ ) G ij = ∞ X m =0 c ℓ m N ℓ/ 2 m N m = ∞ X m =0 c ℓ m N ℓ/ 2 − 1 m . Since c 0 = ⟨ 1 {· ≥ τ ( p, d ) } , q 0 ⟩ L 2 ( µ ) = P ( ⟨ U 1 , U 2 ⟩ ≥ τ ( p, d )) = p and N 0 = 1, from ( D.3 ) w e hav e E G ∼G ( n,p,d ) Y ij ∈ E (Cyc ℓ ) ( G ij − p ) = ∞ X m =1 c ℓ m N ℓ/ 2 − 1 m . (D.4) 62 Th us, it suffices to only b ound the size of c m and N m app earing from Gegen bauer p olynomials. This is done by decomp osing the infinite sum dep ending on the v alue of m . In particular, w e claim that for some constan t C > 0, 1 C ℓ p ℓ log ℓ/ 2 (1 /p ) d ℓ/ 2 − 1 ≤ c ℓ 1 N ℓ/ 2 − 1 1 ≤ C ℓ p ℓ log ℓ/ 2 (1 /p ) d ℓ/ 2 − 1 , (D.5) ⌊ d 1 / 4 ⌋ X m =2 c ℓ m N ℓ/ 2 − 1 m = o p ℓ log ℓ/ 2 (1 /p ) C ℓ d ℓ/ 2 − 1 ! , (D.6) ∞ X m = ⌊ d 1 / 4 ⌋ +1 c ℓ m N ℓ/ 2 − 1 m = o p ℓ C ℓ d ℓ/ 2 − 1 , (D.7) where the asymptotics from now on are with resp ect to d → ∞ , uniformly o v er 3 ≤ ℓ ≤ n ; clearly , Prop osition 6.1 follows from those. F or ( D.5 ) through ( D.7 ), w e will use C 0 , C 1 , . . . to denote absolute constan ts within each case. Leading term ( m = 1 ). F or m = 1, w e ha v e N 1 = d and c 1 = Z 1 τ ( p,d ) √ dx Γ( d/ 2) Γ(( d − 1) / 2) √ π (1 − x 2 ) ( d − 3) / 2 dx = √ d Γ( d/ 2) Γ(( d − 1) / 2)( d − 1) √ π (1 − τ ( p, d ) 2 ) ( d − 1) / 2 . W e sho w that c 1 (equiv alen tly , (1 − τ ( p, d ) 2 ) ( d − 1) / 2 ) is in the order of p p log(1 /p ). This is done by dividing in to t w o cases, where p is small (close to 0) or large (bounded aw ay from 0). F or small p , b y [ BDER16 , Lemma 2] there exists C 0 > 0 suc h that for all p ∈ (0 , 0 . 49], 1 C 0 r log(1 /p ) d ≤ τ ( p, d ) ≤ C 0 r log(1 /p ) d . In particular, there exists ε 0 > 0 suc h that for all p ∈ (0 , ε 0 ], τ ( p, d ) ≥ (1 /C 0 ) p log(1 /p ) /d ≥ p 2 /d . Then b y [ BGK + 01 , Lemma 2.1(b)], 2 C 0 p p log(1 /p ) ≤ 2 p √ dτ ( p, d ) ≤ (1 − τ ( p, d ) 2 ) ( d − 1) / 2 ≤ 6 p √ dτ ( p, d ) ≤ 6 C 0 p p log(1 /p ) , implying that c 1 is in the order of p p log(1 /p ) when p ∈ (0 , ε 0 ]. F or p ∈ ( ε 0 , 0 . 5], as p p log(1 /p ) is of constan t order, it suffices to sho w that (1 − τ ( p, d ) 2 ) ( d − 1) / 2 is of constan t order for the same range of p (uniformly ov er d ). [ LMSY22 , Lemma 3.6] states τ ( p, d ) ≤ r 3 log(1 /p ) d for all 0 < p ≤ 0 . 5 . (D.8) Th us for all sufficiently large d , p 2 ≤ (1 − τ ( p, d ) 2 ) ( d − 1) / 2 ≤ 1 . This sho ws that (1 − τ ( p, d ) 2 ) ( d − 1) / 2 is of constan t order o v er p ∈ ( ε 0 , 0 . 5]. Th us, c 1 is in the order of p p log(1 /p ) which pro ves ( D.5 ). 63 Small m ( 2 ≤ m ≤ d 1 / 4 ). As a brief ov erview, for this regime of m w e will con trol the size of c m and N m in ( D.4 ) inductively using their recursiv e definitions. F or this, we first consider an upp er b ound e c m ≥ 0 of | c m | , defined as e c m := Z 1 τ ( d,p ) | q m ( x ) | µ ( dx ) . Our first claim is that there exists a constant C 0 > 0 suc h that e c m ≤ C 0 p p log(1 /p )(0 . 9 d ) ( m − 1) / 8 , (D.9) for all m ≥ 1. This can b e prov ed by induction; for m = 1, this follo ws from e c 1 = c 1 and the corresp onding analysis for c 1 (in the pro of for ( D.5 )), and for m = 2 this follo ws from e c 2 ≤ Z 1 τ ( p,d ) ( dx 2 + 1) Γ( d/ 2) Γ(( d − 1) / 2) √ π (1 − x 2 ) ( d − 3) / 2 dx = d d − 1 τ ( p, d ) × Γ( d/ 2) Γ(( d − 1) / 2) √ π (1 − τ ( p, d ) 2 ) ( d − 1) / 2 + d d − 1 × Z 1 τ ( p,d ) Γ( d/ 2) Γ(( d − 1) / 2) √ π (1 − x 2 ) ( d − 1) / 2 dx + p ≤ √ dτ ( p, d ) c 1 + 3 p ≤ C 0 p p log(1 /p ) √ dτ ( p, d ) + 3 C 0 p log(1 /p ) ! , where the first equalit y is from in tegration by parts, second inequalit y is from d/ ( d − 1) ≤ 2, (1 − x 2 ) ( d − 1) / 2 ≤ (1 − x 2 ) ( d − 3) / 2 and the definition of c 1 , and the final inequality is from ( D.9 ) for m = 1. F rom ( D.8 ) and d ≥ (5 log(1 /p )) 4 , the factor √ dτ ( p, d ) + 3 / ( C 0 p log(1 /p )) is smaller than (0 . 9 d ) 1 / 8 for all sufficien tly large d . No w we use the recursive definition of the Gegenbauer p olynomials to construct a recursive inequalit y for e c m . It can b e sho wn that the factors in ( D.1 ) satisfy s (2 m + d )(2 m + d − 2) ( m + 1)( m + d − 2) ≤ √ d and s m ( m + d − 3)( m + d/ 2) ( m + 1)( m + d − 2)( m + d/ 2 − 2) ≤ 1 , for all d ≥ 4, m ≥ 1. This implies | q m +1 ( x ) | ≤ √ dx | q m ( x ) | + | q m − 1 ( x ) | , for all x ∈ [ τ ( p, d ) , 1]. Thus, e c m +1 ≤ √ d Z 1 τ ( p,d ) x | q m ( x ) | µ ( dx ) + Z 1 τ ( p,d ) | q m − 1 ( x ) | µ ( dx ) = Z 0 . 9 /d 3 / 8 τ ( p,d ) √ dx | q m ( x ) | µ ( dx ) + Z 1 0 . 9 /d 3 / 8 √ dx | q m ( x ) | µ ( dx ) + e c m − 1 ≤ 0 . 9 d 1 / 8 Z 1 τ ( p,d ) | q m ( x ) | µ ( dx ) + Z 1 0 . 9 /d 3 / 8 dx 2 µ ( dx ) ! 1 / 2 Z 1 0 . 9 /d 3 / 8 ( q m ( x )) 2 µ ( dx ) ! 1 / 2 + e c m − 1 ≤ 0 . 9 d 1 / 8 e c m + Z 1 0 . 9 /d 3 / 8 dµ ( dx ) ! 1 / 2 + e c m − 1 ≤ 0 . 9 d 1 / 8 e c m + 2 √ d exp − (0 . 9) 2 4 d 1 / 4 + e c m − 1 , 64 where the second inequalit y is by Cauch y-Sch warz, third inequality is from ∥ q m ∥ L 2 ( µ ) = 1, and the last inequalit y is from concentration of spherical cap [ Mat13 , Theorem 14.1.1]. No w we apply the induction h yp othesis; supp ose that ( D.9 ) holds for m and m − 1, where m ≥ 2. Then e c m +1 ≤ 0 . 9 d 1 / 8 × C 0 p p log(1 /p )(0 . 9 d ) ( m − 1) / 8 + 2 √ d exp − (0 . 9) 2 4 d 1 / 4 + C 0 p p log(1 /p )(0 . 9 d ) ( m − 2) / 8 ≤ C 0 p p log(1 /p )(0 . 9 d ) ( m − 2) / 8 (0 . 9 d 1 / 4 + 2) ≤ C 0 p p log(1 /p )(0 . 9 d ) m/ 8 , where the second inequality is from 2 √ d exp( − (0 . 9) 2 d 1 / 4 / 4) ≤ exp( − d 1 / 4 / 5) ≤ p which is smaller than C 0 p p log(1 /p )(0 . 9 d ) ( m − 2) / 8 , and the final inequalit y follows from (0 . 9 d ) 1 / 4 ≥ 0 . 9 d 1 / 4 + 2 for all sufficien tly large d . This prov es the first claim ( D.9 ). Our second claim is that N m ≥ d 2 2 × (0 . 9 d 3 ) ( m − 2) / 4 , (D.10) for all 2 ≤ m ≤ d 1 / 4 . This can also b e sho wn b y induction, as N 2 = d +2 2 d − 1 1 ≥ d 2 2 and N m N m − 1 = ( d + 2 m − 2)( d + m − 3) m ( d + 2 m − 4) ≥ d + 2 m − 2 m × (0 . 9) 1 / 4 ≥ (0 . 9 d 3 ) 1 / 4 . Com bining ( D.9 ) and ( D.10 ), we ha v e X 2 ≤ m ≤ d 1 / 4 c ℓ m N ℓ/ 2 − 1 m ≤ X 2 ≤ m ≤ d 1 / 4 ( e c m ) ℓ N ℓ/ 2 − 1 m ≤ 2 ℓ/ 2 − 1 ( C 0 p ) ℓ log ℓ/ 2 (1 /p ) d ℓ − 2 (0 . 9 d ) ℓ/ 8 X m ≥ 0 (0 . 9 d ) ℓm/ 8 (0 . 9 d 3 ) ( ℓ/ 2 − 1)( m/ 4) = 2 ℓ/ 2 − 1 ( C 0 p ) ℓ log ℓ/ 2 (1 /p ) d ℓ − 2 (0 . 9 d ) ℓ/ 8 X m ≥ 0 1 d 1 / 2 ( ℓ/ 2 − 1) m (0 . 9 d ) m/ 4 ≤ 2 ℓ/ 2 − 1 ( C 0 p ) ℓ log ℓ/ 2 (1 /p ) d ℓ − 2 (0 . 9 d ) ℓ/ 8 X m ≥ 0 1 d 1 / 2 m/ 2 (0 . 9 d ) m/ 4 ≤ 2 ℓ/ 2 − 1 ( C 0 p ) ℓ log ℓ/ 2 (1 /p ) d ℓ − 2 (0 . 9 d ) ℓ/ 8 X m ≥ 0 (0 . 9) m/ 4 ≤ 100(2 C 0 p ) ℓ log ℓ/ 2 (1 /p ) d 7 ℓ/ 8 − 2 , where for the third and the last inequality we use ℓ ≥ 3. Let C > 0 b e the constan t in ( D.5 ). Then 100(2 C 0 p ) ℓ log ℓ/ 2 (1 /p ) d 7 ℓ/ 8 − 2 = p ℓ log ℓ/ 2 (1 /p ) C ℓ d ℓ/ 2 − 1 × 100(2 C 0 C ) ℓ d 3 ℓ/ 8 − 1 , where the factor 100(2 C 0 C ) ℓ /d 3 ℓ/ 8 − 1 is uniformly of order o (1) for all ℓ ≥ 3 as d → ∞ . This prov es ( D.6 ). 65 Large m ( m > d 1 / 4 ). F or this regime of m , instead of recursiv ely bounding the size of c m w e directly in v ok e appro ximation results for Gegen bauer p olynomials. This results in a rather complicated expression in Gamma functions. As N m can also b e written in terms of Gamma functions, w e in v ok e Stirling’s approximation for b ounding these and carefully b ound the resulting summands in ( D.4 ) to show that the remaining infinite sum is small. T o b egin, w e ha v e | c m | ≤ Z 1 τ ( p,d ) | q m ( x ) | Γ( d/ 2) Γ(( d − 1) / 2) √ π (1 − x 2 ) ( d − 3) / 2 dx = Γ( d/ 2) Γ(( d − 1) / 2) √ π Z 1 τ ( p,d ) p N m Γ( m + 1)Γ(( d − 1) / 2) Γ(( d − 1) / 2 + m ) | P ( d − 3) / 2 , ( d − 3) / 2 m ( x ) | (1 − x 2 ) ( d − 3) / 2 dx = √ N m Γ( d/ 2)Γ( m + 1) Γ(( d − 1) / 2 + m ) √ π Z 1 τ ( p,d ) | P ( d − 3) / 2 , ( d − 3) / 2 m ( x ) | (1 − x 2 ) ( d − 3) / 2 dx ≤ √ N m Γ( d/ 2)Γ( m + 1) Γ(( d − 1) / 2 + m ) √ π Z 1 τ ( p,d ) √ 3 d − 3 2 1 / 6 1 + d − 3 2 m 1 / 12 (1 − x 2 ) d/ 4 − 1 dx ≤ √ N m Γ( d/ 2)Γ( m + 1) Γ(( d − 1) / 2 + m ) d 1 / 4 Z 1 τ ( p,d ) (1 − x 2 ) d/ 4 − 1 dx ≤ √ N m Γ( d/ 2)Γ( m + 1) Γ(( d − 1) / 2 + m ) d 1 / 4 × C 0 √ d ≤ C 0 √ N m Γ( d/ 2)Γ( m + 1) Γ(( d − 1) / 2 + m ) d 1 / 4 × p exp 1 5 d 1 / 4 , for some constant C 0 > 0. The first equalit y is from [ DX13 , Equation B.2.1], 13 the second in- equalit y is from [ Kra07 , Theorem 2], and the third inequalit y is from p 3 /π (( d − 3) / 2) 1 / 6 (1 + ( d − 3) / (2 m )) 1 / 12 ≤ d 1 / 4 ; the next tw o inequalities are resp ectively from R 1 − 1 (1 − x 2 ) d/ 4 − 1 dx ≲ 1 / √ d and d ≥ (5 log (1 /p )) 4 . Th us, d ℓ/ 2 − 1 ( C 0 p ) ℓ × | c m | ℓ N ℓ/ 2 − 1 m = | c m | C 0 p √ N m ℓ d ℓ/ 2 − 1 N m ≤ Γ( d/ 2) ℓ Γ( m + 1) ℓ Γ(( d − 1) / 2 + m ) ℓ exp ℓ 5 d 1 / 4 + ℓ 4 log d × N m . (D.11) Note that the main summand of interest | c m | ℓ / N ℓ/ 2 − 1 m is already normalized here; for ( D.7 ), it suffices to sho w that ( D.11 ) is o (1 / ( C 0 C ) ℓ ) uniformly o v er d . Since w e need to b ound the sum for all m > d 1 / 4 , within the righ t hand side we collect the 13 The polynomial P ( d − 3) / 2 , ( d − 3) / 2 m is called Jacobi p olynomial, defined as P ( d − 3) / 2 , ( d − 3) / 2 m ( x ) := ( − 1) m 2 m m ! (1 − x 2 ) − ( d − 3) / 2 d m dx m (1 − x 2 ) m +( d − 3) / 2 . See also [ LS23 , Claim 4.3]. 66 factors that dep end on m , namely , Γ( m + 1) ℓ Γ(( d − 1) / 2 + m ) ℓ × N m = Γ( m + 1) ℓ Γ(( d − 1) / 2 + m ) ℓ × d + 2 m − 2 m × Γ( d + m − 2) Γ( m )Γ( d − 1) ≤ C ℓ 1 ( m + 1) ( m +1 / 2) ℓ (( d − 1) / 2 + m ) ( d/ 2+ m − 1) ℓ exp(( d − 3) ℓ/ 2) × d + 2 m − 2 m × ( d + m − 2) d + m − 5 / 2 m m − 1 / 2 ( d − 1) d − 3 / 2 exp(1) ≤ C ℓ 2 exp(( d − 3) ℓ/ 2) ( d − 1) d − 3 / 2 × ( m + 1) ( m +1 / 2) ℓ ( d + m − 2) d + m − 5 / 2 (( d − 1) / 2 + m ) ( d/ 2+ m − 1) ℓ − 1 m m +1 / 2 ≤ C ℓ 2 exp(( d − 3) ℓ/ 2)2 d ( d − 1) d − 3 / 2 × ( m + 1) ( m +1 / 2) ℓ ( d + m − 2) m − 5 / 2 (( d − 1) / 2 + m ) ( d/ 2+ m − 1) ℓ − 1 − d m m +1 / 2 , (D.12) for some c onstan ts C 1 , C 2 > 0 where the first inequality is from Stirling’s approximation, second inequalit y is from d + 2 m − 2 ≤ 2(( d − 1) / 2 + m ), and the third inequality is from d + m − 2 ≤ 2(( d − 1) / 2 + m ). By combining ( m + 1) m − 5 / 2 ( m + d − 2) m − 5 / 2 ( m + ( d − 1) / 2) 2 m − 5 ≤ 1 , ( m + 1) 2 m +1 m m +1 / 2 ( m + ( d − 1) / 2) m +1 / 2 ≤ 1 , ( m + 1) ( m +1 / 2) ℓ − (3 m − 3 / 2) ( m + ( d − 1) / 2) ( m +1 / 2) ℓ − (3 m − 3 / 2) ≤ 1 , (note that for the last inequality we use ( m + 1 / 2) ℓ − (3 m − 3 / 2) ≥ 0, which holds whenev er ℓ ≥ 3) the last term of ( D.12 ) is upp er bounded by C ℓ 2 exp(( d − 3) ℓ/ 2)2 d ( d − 1) d − 3 / 2 × 1 ( m + ( d − 1) / 2) ( ℓ/ 2 − 1) d − 3 ℓ/ 2+2 . Going bac k to ( D.11 ) and summing ov er m > d 1 / 4 , w e obtain d ℓ/ 2 − 1 ( C 0 p ) ℓ X m>d 1 / 4 | c m | ℓ N ℓ/ 2 − 1 m ≤ Γ( d/ 2) ℓ exp ℓ 5 d 1 / 4 + ℓ 4 log d × X m>d 1 / 4 Γ( m + 1) ℓ Γ(( d − 1) / 2 + m ) ℓ N m ≤ Γ( d/ 2) ℓ exp ℓ 5 d 1 / 4 + ℓ 4 log d × C ℓ 2 exp(( d − 3) ℓ/ 2)2 d ( d − 1) d − 3 / 2 × X m>d 1 / 4 1 ( m + ( d − 1) / 2) ( ℓ/ 2 − 1) d − 3 ℓ/ 2+2 ≤ Γ( d/ 2) ℓ exp ℓ 5 d 1 / 4 + ℓ 4 log d × C ℓ 2 exp(( d − 3) ℓ/ 2)2 d ( d − 1) d − 3 / 2 × 1 (( d + 2 d 1 / 4 − 3) / 2) ( ℓ/ 2 − 1) d − 3 ℓ/ 2+1 , where the last inequalit y is obtained b y comparing the sum with integral (here we use that ( ℓ/ 2 − 1) d > 3 ℓ/ 2, which holds for all sufficien tly large d regardless of ℓ ≥ 3). No w that the last line only dep ends on d and ℓ , from Γ( d/ 2) ≲ ( d/ 2) ( d − 1) / 2 exp( − d/ 2) the last 67 line is further upp er bounded by C ℓ 3 d 2 ( d − 1) ℓ/ 2 exp( − dℓ/ 2) exp ℓ 5 d 1 / 4 + ℓ 4 log d exp(( d − 3) ℓ/ 2)2 d ( d − 1) d − 3 / 2 1 (( d + 2 d 1 / 4 − 3) / 2) ( ℓ/ 2 − 1) d − 3 ℓ/ 2+1 ≤ C ℓ 3 d d + 2 d 1 / 4 − 3 ( ℓ/ 2 − 1) d d 2 d − ℓ/ 2 d 3 ℓ/ 2 − 1 exp ℓ 5 d 1 / 4 + ℓ 4 log d exp( − 3 ℓ/ 2) d 3 / 2 2 d − 1 d ≤ C ℓ 3 exp − 8 5 ℓ 2 − 1 d 1 / 4 d d − 1 d (2 d ) ℓ +1 / 2 exp ℓ 5 d 1 / 4 + ℓ 4 log d ≤ exp − 3 5 ℓ − 8 5 d 1 / 4 + 2 l log d , for some constan t C 3 > 0; the last inequality holds as long as d is sufficien tly large. In particular, for the constan t C > 0 in ( D.5 ), exp − 3 5 ℓ − 8 5 d 1 / 4 + 2 l log d ( C 0 C ) ℓ is of order o (1) uniformly ov er all ℓ ≥ 3. This implies d ℓ/ 2 − 1 ( C 0 p ) ℓ X m>d 1 / 4 | c m | ℓ N ℓ/ 2 − 1 m × ( C 0 C ) ℓ = d ℓ/ 2 − 1 C ℓ p ℓ X m>d 1 / 4 | c m | ℓ N ℓ/ 2 − 1 m = o (1) , uniformly o v er ℓ ≥ 3. This prov es ( D.7 ). 68
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment