Incremental Learning-Based Open-Set Classification of Unknown UAVs via RF Signal Semantics
The proliferation of civilian and commercial unmanned aerial vehicles (UAVs) has heightened the demand for reliable radio frequency (RF)-based drone identification systems that can operate under dynamic and uncertain airspace conditions. Most existin…
Authors: Julie Liu, Irshad A. Meer, Cicek Cavdar
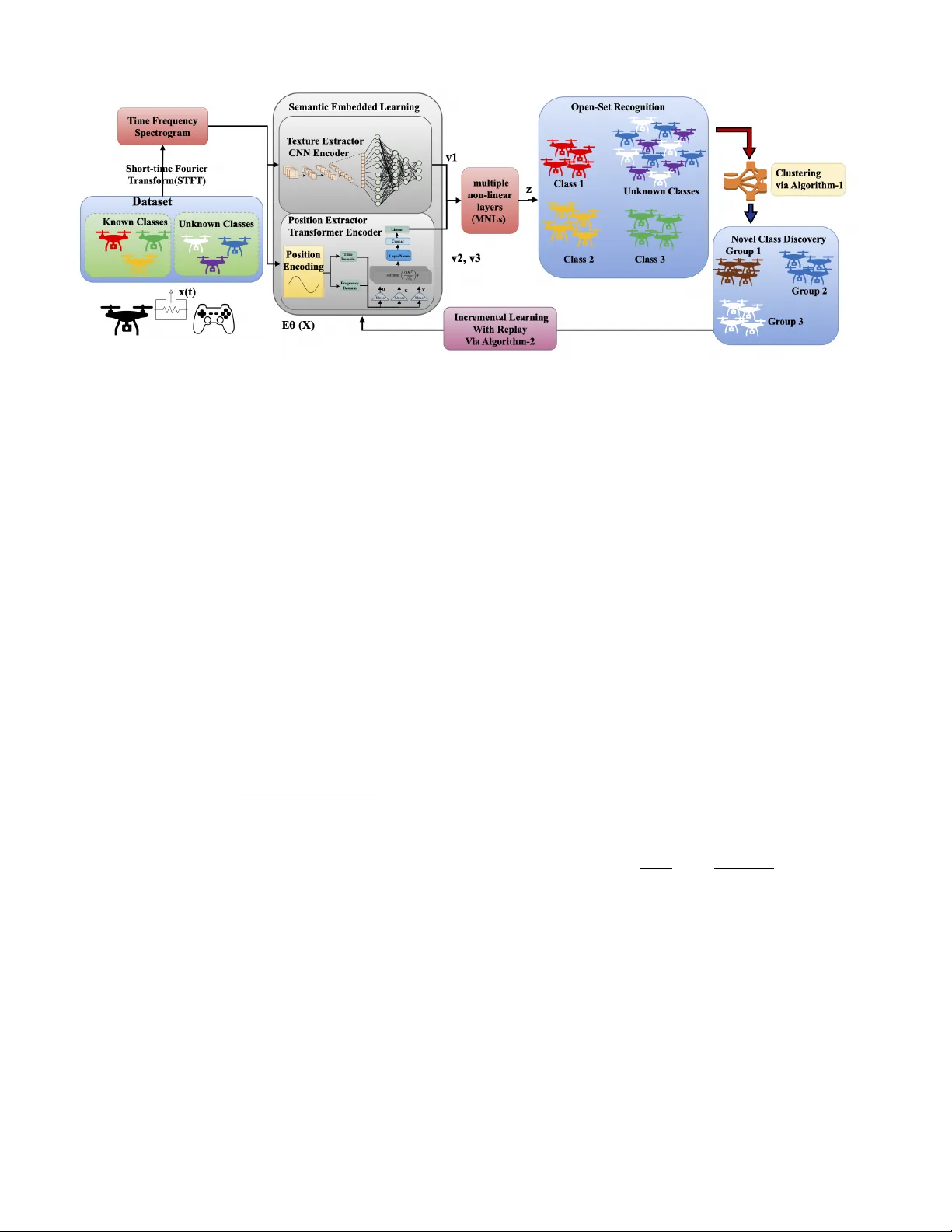
Incremental Learning-Based Open-Set Classification of Unkno wn U A Vs via RF Signal Semantics Julie Liu 1 , Irshad A. Meer 1 , Cicek Cavdar 1 , and Mustafa Ozger 2 1 Department of Computer Science, KTH Royal Institute of T echnology , Sweden 2 Department of Electronic Systems, Aalborg Uni versity , Denmark Email: {xueliu, iameer , cavdar}@kth.se, mozger@es.aau.dk Abstract —The proliferation of ci vilian and commercial un- manned aerial vehicles (U A Vs) has heightened the demand for reliable radio frequency (RF)-based drone identification systems that can operate under dynamic and uncertain airspace conditions. Most existing RF-based recognition methods adopt a closed-set assumption, where all U A V types are known during training. Such an assumption becomes unrealistic in practical deployments, as new or unknown U A Vs frequently emerge, leading to overconfident misclassifications and inefficient retraining cycles. T o address these challenges, this paper proposes a unified incremental open- set learning framework f or RF-based U A V recognition that enables both novel class discovery and incremental adaptation. The framework first performs open-set recognition to separate unknown signals fr om known classes in the semantic feature space, follo wed by an unsupervised clustering module that discovers new U A V categories by selecting between K-Means and Gaussian Mixture Models (GMM) based on composite validity scores. Subsequently , a lightweight incremental learning module integrates the newly discover ed classes through a memory- bounded replay mechanism that mitigates catastrophic f orgetting. Experiments on a real-w orld U A V RF dataset comprising 24 classes (18 known and 6 unknown) show effectiv e open-set detection, promising clustering perf ormance under the evaluated noise settings, and stable incremental adaptation with minimal storage cost, supporting the potential of the pr oposed framework for open-world U A V recognition. Index T erms —Machine Learning, Drone Detection, Radio Frequency Signals, Open-Set Recognition, Incremental Learning I . I N T R O D U C T I O N Unmanned aerial vehicles (U A Vs) are increasingly used in ci vilian, commercial, and defense applications, raising concerns about pri vacy , security , and airspace safety [1, 2]. This moti vates reliable RF-based identification systems that can recognize both known and previously unseen drones. Among existing sensing modalities, RF-based drone recognition is attractive because it operates passively and is less dependent on lighting or visibility conditions [3–8]. Recent learning-based RF methods achieve high accuracy in closed-set settings, b ut typically assume that all U A V types are known during training [9, 10]. In real-world airspace, the en vironment is inherently open, with new or modified UA V types continually emer ging due to hardware, firmware, or model updates. Traditional classifiers This work was supported in part by the Vinno va-funded project SLDS: Self-Learning Drone Surveillance, and in part by the CEL TIC-NEXT project 3D-NET (3D Networks for 6G Mobile Communications Applications) and Robust and AI-Native 6G for Green Networks (RAI-6Green), with funding provided by V innov a, the Swedish Innovation Agency . trained under the closed-set assumption, where all test samples belong to one of the known training classes, are not suited for such conditions. When presented with previously unseen signals, they often produce overconfident predictions for incorrect classes, compromising safety and reliability [11]. In contrast, open-set recognition (OSR) frameworks relax this assumption by allowing test samples to originate from unknown categories [12, 13]. An OSR model must not only classify samples from known classes accurately but also detect unseen inputs and flag them as unknown. Ho wev er, most existing OSR approaches in both vision and RF domains focus solely on the rejection of unkno wn samples, that is, they only detect unfamiliar inputs b ut do not further characterize or learn from them [13]. A natural extension is incremental learning (IL), which incor- porates ne wly discov ered classes while preserving previousl y learned kno wledge [14]. Howe ver , stable IL for RF-based U A V recognition remains challenging due to signal variability , en vironmental dependence, and catastrophic forgetting. IL for RF-based drone recognition poses unique challenges, as the data are complex-v alued, en vironment-dependent, and affected by hardware and propagation variability . Although IL offers a mechanism for adapting RF classifiers to newly emerging classes, the stochastic and non-stationary nature of wireless signals makes stable incremental adaptation particularly chal- lenging. While OSR introduces the clustering-based new class discov ery to partition detected unknown samples into multiple groups, each comprising signals with similar characteristics [15–17]. Howe ver , most existing studies treat clustering as a standalone process rather than as part of an integrated learning pipeline that connects OSR and IL. Moreover , in practical RF en vironments, the pool of unknown samples av ailable for nov el class discov ery is often limited and noisy , demanding clustering algorithms that are ef fective and computationally lightweight. Finally , in field-deployable systems, memory and latency constraints prohibit large-scale retraining or exhaustiv e replay , demanding mechanisms for selective rehearsal. T o address these challenges, this paper proposes a uni- fied incremental open-set learning framework for RF-based U A V recognition. The proposed approach bridges open-set recognition, clustering-based novel class discov ery , and replay based incremental learning within a single, scalable pipeline. Specifically , an open-set recognition module first separates unknown U A V signals from known classes in a learned semantic feature space using dilated con volution encoders and transformer encoders. The rejected samples are then grouped into potential new U A V categories through an unsupervised clustering stage that ev aluates K-Means and Gaussian Mixture Models (GMM) as candidate models and selects the result with the best composite validity score. Finally , a lightweight IL module updates the classifier to incorporate these ne w classes while retaining performance on kno wn cate gories through a compact replay strategy that mitigates catastrophic forgetting. The main contributions of this paper are summarized as follows: • A unified learning framework for RF-based U A V recog- nition that integrates open-set detection, clustering-based nov el class discovery , and incremental learning for adap- tation to previously unseen U A V types. • A rob ust clustering strate gy with composite validity metrics and automatic model-order selection to ensure reliable nov el class discovery under noisy RF conditions. • A memory-efficient incremental learning mechanism with bounded replay that improves knowledge retention during adaptation and mitigates catastrophic forgetting. I I . S Y S T E M M O D E L A N D P RO B L E M F O R M U L AT I ON W e consider an open-world RF-based UA V recognition scenario, where a spectrum monitoring system continuously observes signals originating from both known and previously unseen drones. The receiv ed RF signal samples are defined as: x ( t ) = s c ( t ) e j 2 πf c t + n ( t ) , (1) where s c ( t ) denotes the transmitted wa veform at carrier frequency f c , and n ( t ) represents additi ve noise. These raw in-phase and quadrature (I/Q) signals are first transformed into time–frequency representations through the short-time Fourier transform (STFT), yielding a spectrogram X ( n, w ) that captures both temporal e volution and spectral structure. A logarithmic power scaling and normalization to [0 , 1] are applied to ensure consistent amplitude ranges across different U A Vs and flight conditions. Let C 0 denote the set of known UA V classes used for training, and let C u denote the unknown U A V classes that may appear during deployment, with C u ∩ C 0 = ∅ and C u ∪ C 0 = C t . T o mitigate catastrophic forgetting, a lightweight replay memory M is maintained, which stores a limited number of representative samples from previously learned classes under the storage constraint |M| ≤ M max , where M max denotes the maximum number of representati ve samples that can be retained from earlier classes. The objective is to design a learning model that can (i) classify UA Vs belonging to known categories, (ii) detect and isolate unknown U A V signals, (iii) cluster the unknown signals into potential new categories, and (iv) incrementally incorporate the newly discov ered categories without catastrophic forgetting. A. Pr oblem Definition Formally , given a stream of U A V RF signals { x t } arriving ov er time with dynamically e volving class sets C t , the objectiv e is to learn a classifier h θ with model parameters θ that maximizes the recognition performance o ver both old and ne wly discov ered classes while operating under bounded storage and computational resources: max θ h Acc old ( θ ) | {z } Known classes accuracy + Acc new ( θ ) | {z } New classes accuracy i s.t. |M| ≤ M max , Ψ comp ( θ ) ≤ Γ max . (2) where Acc old and Acc new denote the classification accuracies on previously kno wn and newly discov ered classes, respectiv ely . Ψ comp ( θ ) denotes the computational cost of the model, such as incremental update overhead or inference complexity , and Γ max represents the maximum allowable compute budget. This formulation captures the joint requirements of recognition, discov ery , and incremental adaptation under bounded memory and computation, and provides the basis for the methodology presented next. I I I . P R O P O S E D M E T H O D O L O G Y W e first transform the spectrogram X ( n, w ) into semantic feature representations and then process it by the OSR module, which separates known and unkno wn classes. The detected unkno wn samples are subsequently passed to a clustering-based ne w class discovery module, where they are grouped according to their feature similarity . These clustered samples, together with the existing knowledge base, are then fed into an IL block that updates the main classifier to recognize newly discovered classes without retraining from scratch. Figure 1 illustrates the ov erall architecture of the proposed incremental open-set learning framew ork. In the following, we expand in detail on all the components and provide the proposed algorithms. A. Semantic Embedding Learning The first stage aims to learn a discriminati ve embedding that captures the semantic structure of UA V RF signals. Each normalized spectrogram X ( n, w ) is processed by a hybrid encoder E θ ( · ) parameterized by θ , which follows a dual-branch architecture comprising a conv olutional texture extractor and a transformer-based positional encoder . The texture extractor (CNN encoder) produces a texture feature vector v 1 through multiscale dilated con volutions that capture fine-grained spec- tral textures and wideband temporal env elopes. In parallel, the transformer encoder generates position-aware representations v 2 and v 3 from successi ve self-attention layers using sinusoidal positional encodings to preserve time–frequency locality and model long-range dependencies. The intermediate features { v 1 , v 2 , v 3 } are then fused and projected through multiple non- linear layers (MNLs) to form a compact semantic embedding [13]: z = f MNL [ v 1 , v 2 , v 3 ] = E θ ( X ) ∈ R D , where D denotes the dimensionality of the learned embedding space. This fused representation z jointly encodes spec- tral–temporal textures, positional dependencies, and semantic correlations of the input RF signal. T o ensure that samples of the same U A V type form compact clusters and those from dif ferent U A Vs are well separated, the encoder is trained using a composite feature loss, which is calculated as follows [13]: L feat = η 1 L cen + η 2 L sep + η 3 L CE , (3) Figure 1: An overvie w of the proposed open-world RF-based U A V recognition framew ork integrating open-set recognition, nov el class discov ery , and incremental learning with replay . where L cen enforces intra-class compactness, L sep imposes inter- class mar gin separation, and L CE denotes standard cross-entropy supervision. The coefficients η 1 , η 2 , and η 3 control the relative contribution of each component. The model parameters are updated by minimizing a weighted sum of all three losses using stochastic gradient descent (SGD). This optimization yields a well-structured semantic embedding space in which U A Vs with similar signal characteristics cluster closely together , providing a robust foundation for subsequent open-set recognition and incremental learning. B. Open-Set Recognition After training on the kno wn U A V classes C 0 , the learned semantic embeddings are modeled using Gaussian class statis- tics. Each class k is represented by its mean vector µ k and cov ariance matrix Σ k , which jointly define a probabilistic decision region in the embedding space. During inference, a test embedding z is compared against all kno wn classes using the Mahalanobis distance, which is calculated as follows [13]: d k ( z ) = q ( z − µ k ) ⊤ Σ − 1 k ( z − µ k ) . (4) For each class, a distance threshold τ k is deriv ed using the classical three-sigma rule, assuming that intra-class Maha- lanobis distances approximately follow a normal distribution [18], [19]: τ k = µ d k + 3 σ d k , (5) where µ d k and σ d k denote the mean and standard deviation of the distances within class k . This three-sigma rule defines a 99 . 7% confidence boundary , allo wing each class to self- adaptiv ely determine its acceptance region in the semantic space. At test time, the sample is assigned to the class k ∗ = arg min k d k ( z ) if d k ∗ ( z ) < τ k ∗ ; otherwise, it is rejected as an unknown U A V and added to the candidate pool U for further clustering. This formulation provides a statistically grounded and parameter- free mechanism for open-set recognition, ensuring that samples dissimilar to all kno wn classes are automatically filtered for nov el class discov ery . C. Clustering for Novel Class Discovery After OSR, embeddings of rejected RF samples are grouped using unsupervised clustering to identify potential new UA V classes. As shown in Algorithm 1, prior to clustering, the feature matrix Z is standardized, and dimensionality reduction is applied when necessary . Specifically , Principal Component Analysis (PCA) is employed if the original embedding dimen- sion d exceeds 64, projecting the data to m = min(64 , d ) components. PCA compresses the high-dimensional semantic embeddings while retaining most of their variance, which improv es clustering stability and computational efficiency by mitigating the curse of dimensionality . W e employ K-Means and Gaussian Mixture Models (GMM) to cluster the rejected unknown U A V samples. The optimal cluster number k ⋆ is determined through two complementary criteria: the elbow method and a composite validity score The elbow method detects the inflection point of the inertia curve to distinguish between under and ov er segmentation [20]. The composite score Q ( k ) integrates multiple clustering quality indices like Silhouette ( S k ), Calinski–Harabasz ( C H k ), Davies–Bouldin ( D B k ), and explained variance ( V k ). The final composite score Q ( k ) is defined as: Q ( k ) = 0 . 4 S k + 0 . 3 C H k 1000 + 0 . 2 1 1 + D B k + 0 . 1 V k . (6) This formulation balances intra-cluster compactness, inter- cluster separation, and statistical stability , ensuring robust clus- ter estimation under varying RF channel conditions. Clusters with purity abov e τ p and sizes within the range [ s min , s max ] are retained as candidate novel UA V categories for the subsequent incremental learning stage. The detailed clustering procedure is summarized in Algorithm 1. D. Incr emental Learning with Lightweight Replay Once new UA V classes are identified through clustering, the model incrementally integrates them while maintaining performance on previously learned classes C 0:( t − 1) . Samples are selected according to per-class quality control and replay budget rules to ensure balanced co verage and pre vent o ver - representation. During each incremental update, both new and Algorithm 1: Clustering for Unknown RF Samples Input : Embeddings Z ∈ R N × d of rejected samples; candidate cluster range k ∈ { 0 , 1 , . . . , k max } . Output : Chosen cluster number k ⋆ and assigned labels ℓ . Prepr ocess: Standardize Z ; if dim( Z ) > 64 then apply PCA to m = min(64 , d ) dimensions.; for k ← 0 to k max do Fit K-Means ( k ) and GMM ( k ) .; Compute composite score Q ( k ) ← 0 . 4 S k + 0 . 3 C H k 1000 + 0 . 2 1 1 + D B k + 0 . 1 V k .; Record K-Means inertia: Inertia ( k ) .; Identify elbow point k elbow ← E L B O W ( Inertia ) .; Identify best score k score ← arg max k Q ( k ) .; if Q ( k elbow ) ≥ 0 . 9 Q ( k score ) then k ⋆ ← k elbow .; else k ⋆ ← k score .; Assign labels ℓ using GMM ( k ⋆ ) (or K-Means ( k ⋆ ) ).; Filter clusters by purity ≥ τ p and size in [ s min , s max ] .; Retain accepted clusters as new U A V classes C new .; replayed samples are mixed into balanced mini-batches, and the model parameters are optimized by minimizing L ( t ) CE . This lightweight replay mechanism mitigates catastrophic forgetting by maintaining old feature representations within a compact memory budget. The overall incremental learning loop, summarized in Algo- rithm 2, integrates three main stages. (1) Open-set r ecognition: each incoming RF sample X is encoded into a semantic embedding z = E θ ( X ) , and classified based on Mahalanobis distance to existing class distributions. Unknown samples are stored as U . (2) Novel class discovery: when |U | exceeds a threshold, Algorithm 1 is inv oked to cluster U into new categories C new , guided by the optimal cluster number k ⋆ . (3) Incr emental model update: a mixed training set C new ∪ M is assembled with per-class replay caps ( old max , new max ) , followed by to minimizing L ( t ) CE and update the class statistics. This closed-loop process enables the system to continu- ously expand its recognition capability in open-world RF en vironments, autonomously assimilating novel U A V categories while maintaining stable accuracy on previously learned ones. It effecti vely balances adaptability and retention, achieving robustness against catastrophic for getting under limited memory constraints. I V . R E S U L T S A N D D I S C U S S I O N A. Experimental Setup The proposed framew ork is ev aluated on a real-world U A V RF dataset [21] to assess its ef fecti veness across open-set detection, novel class discovery , and incremental adaptation. Experiments are designed to measure the system’ s ability to (i) correctly classify kno wn U A Vs, (ii) detect and cluster previously unseen UA V types, and (iii) preserve past knowledge during Algorithm 2: Incremental Learning of Newly Discov- ered Classes Input: Encoder E θ ; stats { ( µ k , Σ k , τ k ) } k ∈C 0 ; replay memory M (capacity M max ). Output: Updated encoder E θ ′ ; expanded class set C 0 ← C 0 ∪ C new . 1) Open-set recognition for each incoming RF sample X do z ← E θ ( X ) ; compute d k ( z ) for all k ∈ C 0 ; k ⋆ ← arg min k d k ( z ) ; if d k ⋆ ( z ) < τ k ⋆ then assign class k ⋆ ; else store z in unknown buf fer U ; end end 2) Nov el class discovery if |U | ≥ n min then run Algorithm 1 on U to obtain C new ; clear U ; end 3) Incremental model update Assemble mixed training set from C new ∪ M with per-class caps (old_max, new_max); Update θ ← arg min L IL ; recompute ( µ k , Σ k , τ k ) ; update M ; T able I: Experimental Setup and Training Parameters Category Description Dataset Real-world U A V RF dataset with 24 drone types across 915 MHz, 2 . 4 GHz, and 5 . 8 GHz bands [21]. Known / Unknown Classes 18 classes used for training (known); 6 reserved for evaluation (unkno wn). Signal Representation Complex I/Q samples transformed to STFT - based spectrograms, normalized to [0 , 1] (see Section II). Encoder T raining Optimized using composite feature loss Eq. (3) with η 1 = 0 . 5 , η 2 = 0 . 3 , η 3 = 0 . 2 . Optimizer / Batch Size Adam optimizer, learning rate 10 − 4 , mini- batch size 64 . Incremental Learning Incremental updates use a replay memory with per-class caps of old max = 0 , 5 , 10 and new max = 60 ; overall memory budget M max . sequential learning updates. T able I summarizes the dataset characteristics, network configuration, and key hyperparameter settings used in all experiments. B. Open-Set Recognition P erformance W e first e valuate the OSR capability of the proposed frame work. Figure 2 presents the normalized confusion matrix under the open-set condition, where strong diagonal dominance indicates accurate classification of known U A Vs. Samples from unknown drones are successfully rejected rather than Figure 2: Normalized confusion matrix under open-set testing. misclassified, confirming that the Mahalanobis-based decision boundary effecti vely separates unseen categories. C. Clustering-Based Novel Class Discovery Figure 3 visualizes the two-dimensional t-SNE projection of the clustered embeddings from unknown U A V samples. Figure 3(a) sho ws the predicted clusters generated by the proposed composite clustering strategy , while Figure 3(b) presents the ground-truth unknown U A V classes. Each color represents a distinct cluster or true category . The strong alignment between Figures 3(a) and 3(b) confirms that the learned feature embeddings preserv e semantic relationships among UA V signals, and that the composite cluster-selection strategy effecti vely partitions unseen U A V types into meaning- ful groups. While the overall correspondence between predicted clusters and true unknown classes is strong, a few deviations are observed. Specifically , Class 19 appears as the dominant component in both Cluster 4 and Cluster 5, suggesting a mild case of overclustering. This can be attributed to the intra-class variability of Class 19, which in volv es multiple operational modes such as hovering, recording, and navigation that produce distinct RF signatures. Conv ersely , Class 22 is split between Cluster 1 and Cluster 6, where samples from the same U A V type are assigned to two separate clusters. This intra-class split likely results from channel or en vironment dependent variations in the captured signals. These observ ations indicate that although the composite clustering approach maintains ov erall semantic consistency , signal div ersity and propagation effects can still cause mode-dependent fragmentation, suggesting future work on mode-aware or domain-robust clustering mechanisms. T able II compares the clustering performance of K-Means, GMM, and the proposed composite selection strategy . In this work, the composite mode does not represent a separate cluster- ing algorithm but rather a selection mechanism that ev aluates the outcomes of K-Means and GMM using the proposed composite v alidity score Q ( k ) . This score integrates multiple internal clustering indices as giv en in (6) . The composite validity score jointly assess intra-cluster compactness, inter- cluster separation, and statistical stability , which is also shown in Algorithm 1. T able II: Comparison of clustering modes (K-Means, GMM, Composite). Mode S k C H k DB k V k Composite Purity K-Means 0.444 1399.6 0.947 0.698 0.770 0.921 GMM 0.388 1222.7 1.234 0.702 0.682 0.906 Composite 0.444 1399.6 0.947 0.698 0.770 0.921 T able III: Incremental learning accuracy under replay budget constraint. Replay cap T rain size Acc old (%) Acc new (%) old_max =0 (360 , 512) 0 . 0 98 . 7 old_max =5 (450 , 512) 100 . 0 98 . 1 old_max =10 (540 , 512) 100 . 0 98 . 5 As shown in T able II, K-Means achiev es the highest composite score ( 0 . 770 ) and purity ( 0 . 921 ), indicating stronger cluster consistency compared to GMM. Therefore, under the composite ev aluation framew ork, the K-Means configuration is automatically selected as the optimal clustering result for subsequent incremental learning. D. Incr emental Learning P erformance Finally , we ev aluate the incremental update stage, where new U A V classes discovered by clustering are assimilated without retraining the entire model. T able III illustrates the effect of replay memory size on old and new class accuracies. When no replay is used ( old_max = 0 ), catastrophic forgetting occurs, and old class accuracy drops to 0%. Introducing a small replay budget ( old_max = 5 ) restores the performance to 100%, while maintaining approximately 98% accuracy on ne w classes. Further increasing the replay size yields negligible improv ement, indicating that a minimal subset of representativ e samples suffices to stabilize learning. These results confirm that the proposed incremental frame- work achie ves a fa vorable stability–plasticity trade-off: it retains past knowledge with minimal rehearsal while effecti vely learn- ing new UA V types. The combination of semantic embedding, probabilistic open-set detection, and selecti ve replay thus provides a robust foundation for real-time UA V classification in ev olving airspace environments. E. Discussion and Limitations The current ev aluation is conducted on a fixed class split with 18 known and 6 unknown U A V classes to ensure reproducibility . Evaluating multiple known and unknown ratios and random unknown-class selections is an important next step for assessing generalization stability . In addition, the current incremental ev aluation considers the introduction of new classes after initial training, while a stricter sequential arriv al setting will be explored in future work. For open- set recognition, the Gaussian approximation of class-wise Mahalanobis distances is adopted as a practical thresholding strategy and works well in the e valuated setting, although its validity in more complex RF en vironments requires further in vestigation. Finally , the results show that replay is currently (a) Predicted clusters (b) True unknown classes Figure 3: t-SNE visualization of (a) predicted clusters and (b) true unknown classes. Strong correspondence v alidates semantic consistency of clustering. the primary mechanism for mitigating for getting, and future work will explore regularization-based or partially frozen updates to reduce replay dependence. V . C O N C L U S I O N This paper presented an incremental open-set learning frame work for RF-based U A V recognition that enables reliable operation under dynamic and ev olving airspace conditions. Unlike con ventional closed-set classifiers that fail when un- seen drones appear , the proposed system integrates open- set recognition, clustering-based novel class discov ery , and replay-driv en incremental learning into a unified pipeline. The Mahalanobis-distance decision mechanism ef fecti vely separates unkno wn U A V signals, while the composite clustering criterion enables automatic and semantically consistent discov ery of new drone categories. The lightweight replay strate gy further allows the model to assimilate these new classes without retraining from scratch or suffering from catastrophic forgetting. Experimental results on a real-world multi-band RF dataset demonstrate that the proposed method achiev es high open-set detection accuracy , strong cluster purity , and stable incremental adaptation with minimal memory overhead. These findings highlight the potential of incremental open-set learning for scalable and lifelong RF signal intelligence. Future work will explore domain inv ariant feature extraction under v arying channel conditions, real-time deployment on embedded RF recei vers, and federated incremental learning across distributed U A V monitoring nodes. R E F E R E N C E S [1] I. A. Meer, M. Ozger, D. A. Schupke, and C. Cavdar , “Mobility Management for Cellular-Connected U A Vs: Model-Based V ersus Learning-Based Approaches for Service A vailability ,” IEEE T rans. on Network and Service Management , vol. 21, no. 2, pp. 2125–2139, 2024. [2] I. A. Meer, M. Ozger, M. Lundmark, K. W . Sung, and C. Cavdar, “Ground Based Sense and A void System for Air Traf fic Management,” in IEEE PIMRC , 2019, pp. 1–6. [3] F . Svanström, C. Englund, and F . Alonso-Fernandez, “Real- time drone detection and tracking with visible, thermal and acoustic sensors,” in IEEE ICPR , 2021, pp. 7265–7272. [4] A. Bernardini, F . Mangiatordi, E. Pallotti, and L. Capodiferro, “Drone detection by acoustic signature identification,” in Proc. IS&T Int. Symp. Electron. Imag. Sci. T echnol. , Jan. 2017, pp. 60– 64. [5] E. Matson, B. Y ang, A. Smith, E. Dietz, and J. Gallagher, “U A V detection system with multiple acoustic nodes using machine learning models,” in 3r d IEEE Int. Conf. Robot. Comput. (IRC) , Mar . 2019, pp. 493–498. [6] S. Jeon et al., “Empirical study of drone sound detection in real-life environment with deep neural networks,” in 25th Eur . Signal Pr ocess. Conf. (EUSIPCO) , Aug. 2017, pp. 1858–1862. [7] I. Guvenc, F . Koohif ar, S. Singh, M. L. Sichitiu, and D. Matolak, “Detection, tracking, and interdiction for amateur drones,” IEEE communications magazine , vol. 56, no. 4, pp. 75–81, 2018. [8] P . Andraši, T . Radiši ´ c, M. Muštra, and J. Ivoševi ´ c, “Night-time detection of uavs using thermal infrared camera,” T ransporta- tion Researc h Procedia , vol. 28, pp. 183–190, 2017. [9] O. O. Medaiyese, A. Syed, and A. P . Lauf, “Machine learning framew ork for RF-based drone detection and identification system,” in IEEE ICON-SONICS , 2021, pp. 58–64. [10] K. N. Inani, K. Sangwan, et al., “Machine Learning based framew ork for Drone Detection and Identification using RF signals,” in IEEE ICITIIT , 2023, pp. 1–8. [11] C. Geng, S. - j. Huang, and S. Chen, “Recent advances in open set recognition: A survey,” IEEE T rans. on P attern Anal. and Mach. Intell. , vol. 43, no. 10, pp. 3614–3631, 2020. [12] Y . Fu, Z. Liu, and J. L yu, “Reason and discov ery: A ne w paradigm for open set recognition,” IEEE T rans. on P attern Anal. and Mach. Intell. , vol. 47, no. 7, pp. 5586–5599, 2025. [13] N. Y u, J. W u, C. Zhou, Z. Shi, and J. Chen, “Open set learning for RF-based drone recognition via signal semantics,” IEEE T rans. on Inf. F orensics and Secur . , vol. 19, 2024. [14] G. M. V an de V en, T . T uytelaars, and A. S. T olias, “Three types of incremental learning,” Nature Machine Intelligence , vol. 4, no. 12, pp. 1185–1197, 2022. [15] C. J. Swinney and J. C. W oods, “K-means clustering approach to U AS classification via graphical signal representation of radio frequency signals for air traffic early warning,” IEEE T ransactions on Intelligent T ransportation Systems , vol. 23, no. 12, pp. 24 957–24 965, 2022. [16] T . M. Hoang, N. M. Nguyen, and T . Q. Duong, “Detec- tion of eavesdropping attack in U A V -aided wireless systems: Unsupervised learning with one-class SVM and K-means clustering,” IEEE W ir eless Communications Letters , v ol. 9, no. 2, pp. 139–142, 2019. [17] J. C. Park, K. - M. Kang, and J. Choi, “K-means clustering- aided power control for U A V -enabled OFDM networks,” IEEE Access , vol. 12, pp. 15 549–15 560, 2024. [18] F . Pukelsheim, “The three sigma rule,” The American Statisti- cian , vol. 48, no. 2, pp. 88–91, 1994. [19] Y . Zhao, B. Lehman, R. Ball, J. Mosesian, and J. - F . de Palma, “Outlier detection rules for fault detection in solar photov oltaic arrays,” in IEEE APEC , 2013, pp. 2913–2920. [20] P . Bholo walia and A. Kumar , “EBK-means: A clustering technique based on elbow method and k-means in WSN,” Int. J. of Comput. Appl. , vol. 105, no. 9, 2014. [21] N. Y u, DroneRFb-Spectr a: A RF spectr ogram dataset for dr one r ecognition , 2024.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment