Mixed-Integer vs. Continuous Model Predictive Control for Binary Thrusters: A Comparative Study
Binary on/off thrusters are commonly used for spacecraft attitude and position control during proximity operations. However, their discrete nature poses challenges for conventional continuous control methods. The control of these discrete actuators i…
Authors: Franek Stark, Jakob Middelberg, Shubham Vyas
Except where other wise noted, content of this paper is licensed under a Creative Commons Attribution 4.0 International License. The reproduction and distr ibution with attribution of the entire paper or of individual pages, in electronic or printed form, including any material under non-CC-BY 4.0 licenses is hereby granted b y the authors and respective copyright owners. 086 - 1 doi: 10.82124/CEAS-GNC-2026-086 E uro GNC Na vi g a ti o n C on tr ol G u i d a n c e 2026 M ad r id, S pain M ay 5 th - 7 th CEAS-GNC-2026-086 Mix ed-Integ er v s. Continuous Model Predictiv e Control f or Binary Thrusters: A Comparativ e Study Franek Stark R obotics R esearcher , R obotics Inno v ation Center , Ger man R esearch Center f or Arti- ficial Intelligence GmbH , Bremen, Germany . franek.stark@dfki.de Jak ob Middelberg R esearch Assistant, Robotics Inno v ation Center , Ger man R esearch Center f or Artifi- cial Intelligence GmbH , Bremen, Germany . jak ob.middelberg@dfki.de Master Student, Univ ersity of Bremen , Germany . middelberg@uni-bremen.de Shubham V y as R obotics R esearcher , R obotics Inno v ation Center , Ger man R esearch Center f or Arti- ficial Intelligence GmbH , Bremen, Germany . shubham.vy as@dfki.de ABS TRA CT Binary on/off thrusters are commonl y used f or spacecraft attitude and position control during pro ximity operations. Ho w ev er , their discrete nature poses challeng es for con v entional continu- ous control methods. The control of these discrete actuators is either explicitl y formulated as a mix ed-integ er optimization problem or handled in a tw o-la y er approac h, where a continuous con- troller’ s output is con v erted to binary commands using analog-to-digital modulation techniques such as Delta-Sigma ( ΔΣ )-modulation. This paper pro vides the first systematic comparison betw een these tw o paradigms f or binary thruster contr ol, contrasting continuous Model Predictiv e Control (MPC) with Delta-Sigma modulation against direct Mix ed-Integ er MPC (MIMPC) approaches. Furthermore, w e pr opose a ne w variant of MPC f or binary actuated systems, whic h is inf ormed using the state of the Delt a-Sigma Modulator . The two variations f or the continuous MPC along with the MIMPC are e valuated through e xtensive simulations using ES A ’ s REcap- A Crobat-S Atsim (REA CS A) platf orm. Results demonstrate that while all approac hes perform similarl y in high- thrust regimes, MIMPC achie v es superior fuel efficiency in lo w-thrust conditions. Continuous MPC with modulation sho ws instabilities at higher thrust le vels, while binary informed MPC, which incorporates modulator dynamics, impr o v es robustness and reduces the efficiency gap to the MIMPC. It can be seen from the simulated and real-system experiments that MIMPC offers comple te stability and fuel efficiency benefits, particularly for resour ce-constrained missions, while continuous control me thods remain attractiv e f or computationally limited applications. Ke yw ords: model predictiv e control, mix ed-integer optimization, satellite control N omenclature 𝜃 = Platf or m or ientation (y aw) in w orld coordinates ¤ 𝜃 = Platf or m angular v elocity in wor ld coordinates 𝑥 , 𝑦 = Platf or m position in w orld coordinates ¤ 𝑥 , ¤ 𝑦 = Platf orm velocity in w orld coordinates 𝜔 𝑅𝑊 = R eaction Wheel (R W) rotational speed Except where other wise noted, content of this paper is licensed under a Creative Commons Attribution 4.0 International License. The reproduction and distr ibution with attribution of the entire paper or of individual pages, in electronic or printed form, including any material under non-CC-BY 4.0 licenses is hereby granted b y the authors and respective copyright owners. 086 - 2 s 𝜃 , c 𝜃 = Sine and cosine of 𝜃 x , u = State and in put vector of the sy stem ˆ x = T arg et state 𝐹 n = Nominal thrust f orce applied b y a single thr uster 𝑟 = Platf or m radius 𝑚 , 𝐼 S = Platf or m o verall mass and inertia on the 𝑧 -axis. 𝐼 R W = R W’ s iner tia on the 𝑧 -axis. x 𝑗 | 𝑡 , u 𝑗 | 𝑡 = State and in put prediction of time step 𝑗 , predicted at time s tep 𝑡 𝑁 = Prediction Horizon Δ t = Discretization time of the sy stem dynamics within the controller U 𝑡 , X 𝑡 = Set of all predicted states and in puts at time step 𝑡 u bin ,𝑡 = Set of all predicted binary inputs at time step 𝑡 Q , W = Diagonal cost matrices f or state and input cos t terms. 1 Intr oduction Satellites and space v ehicles are commonly equipped with either cold gas or hyper golic thr usters f or attitude and position control dur ing pro ximity operations [1]. These thrusters are usuall y binar y actuated, i.e., they are on/off devices and can only be either fully on or fully off. This is due to the fact that the thrusters are ordinar ily designed to operate at a specific pressure and flo w rate, and operating them at partial thrust can lead to ins tability and inefficiency . Further more, on/off thrusters are often simpler than v ar iable-thr ust thrusters, leading to higher reliability and lo w er cost. Ho we ver , most control methods assume a smooth and continuous s tate and control input, which is not giv en with on/off thr usters. Theref ore, many exis ting control methods outlined in the literature are not directl y applicable, making it challenging to ac hie v e precise attitude and position control. This results in tw o options f or the dev elopment of control sys tems f or proximity operations with binary thr usters. The first is to use a tw o-lay er control architecture, where a continuous controller g enerates the desired control inputs, and a separate module con v er ts these inputs into binar y commands f or the thr usters. Different methods hav e been proposed, from using simple thresholding logic [2], up to modulators like pulse-width modulation (PWM) [3] or ΔΣ -modulation [4, 5] or similar schemes to conv er t analog/continuous control input to digital/discrete v alues. The second option is to directly perform control on the binar y control inputs using Mixed Integer (MI) methods. U ntil recently , these w ere considered too computationally e xpensiv e f or real-time control, but recent advances in MI optimization ha v e made it possible to sol v e these problems in real-time [6–9]. The first approac h, while computationally adv antag eous, can lead to suboptimal perf ormance, as the continuous controller ma y not be able to full y account f or the limitations of the binary thr us ters, such as dw ell-time cons traints (ramp-up or cool-do wn time). The second approach, while more comple x, can lead to better per f or mance, as it can directl y account f or the limitations of the binar y thr usters. While earlier w ork has compared the per f or mance of PWM and ΔΣ -modulation [4], to the best of the authors ’ kno w ledge, there has been no work comparing the per f ormance of the tw o-lay er approac h with MI methods f or controlling sy stems with binary thrusters. Such a comparison w ould allo w f or unders tanding the trade-offs betw een the two approaches and help in understanding if the increased effort f or MI methods is justified b y the per f or mance g ains. In this paper , we compare the per f or mance of a tw o-la yer control architecture using a continuous input Model Predictive Control (MPC) with Δ Σ -modulation with a Mixed Integ er Model Predictiv e Control (MIMPC) approach f or controlling a system with on/off thrusters. W e also introduce a new MPC approach which uses a continuous input MPC, that is inf or med about the behavior of the Δ Σ -modulator in the prediction hor izon. This allow s the MPC to account f or the limitations of the binar y thr usters while still being able to use efficient numerical methods f or sol ving the continuous optimization problem. Except where other wise noted, content of this paper is licensed under a Creative Commons Attribution 4.0 International License. The reproduction and distr ibution with attribution of the entire paper or of individual pages, in electronic or printed form, including any material under non-CC-BY 4.0 licenses is hereby granted b y the authors and respective copyright owners. 086 - 3 W e compare the perf ormance of these three approaches in ter ms of their ability to reach and maintain a targ et position, as well as their efficiency in ter ms of thr uster usag e. The compar ison is per f ormed through a simulation study along with e xper imental validation of the new ly proposed binary-inf ormed MPC approac h at the Orbital Robotics & GNC Lab (OR GL) of the European Space Ag ency (ES A) [10]. Both the simulation and hardware datasets 1 , together with the controller implementation 2 , are publicly a v ailable as open source resources. 2 Sy stem Description Fig. 1 Sk etch (left) of the free-floating platf orm REcap- A Crobat-S Atsim (REA CSA) (right) The sys tem, which ser v es as an e xample f or a satellite or small spacecraft, is ES A’ s free-floating platf or m REA CS A [11]. It is a 200 kg heavy air -bear ing platf or m with a propulsion sys tem containing eight cold-g as thrusters and an additional Reaction Wheel (R W). A sk etch of the sy stem, sho wing the thruster configuration, is shown along with a picture in Figure 1. The cold-g as propulsion enf orces a minimum thr us ter activation time 𝑡 on, min = 0 . 1 s and limits the maximum fir ing time of a single thr uster to 𝑡 on, max = 0 . 3 s . Fur ther , it enf orces a cool-do wn time of 𝑡 off, min = 0 . 2 s betw een consecutiv e firings of the same thrusters. REA CS A’ s o v erall sy stem proper ties are giv en in T able 2. REA CS A is modeled as a linear time-v ar ying sy stem, the dynamics are giv en b y: ¤ x = " 0 3 × 3 I 3 × 3 0 3 × 1 0 4 × 7 # | {z } A x + 0 3 × 9 0 − s 𝜃 𝐹 n 𝑚 s 𝜃 𝐹 n 𝑚 − c 𝜃 𝐹 n 𝑚 c 𝜃 𝐹 n 𝑚 s 𝜃 𝐹 n 𝑚 − s 𝜃 𝐹 n 𝑚 c 𝜃 𝐹 n 𝑚 − c 𝜃 𝐹 n 𝑚 0 c 𝜃 𝐹 n 𝑚 − c 𝜃 𝐹 n 𝑚 − s 𝜃 𝐹 n 𝑚 s 𝜃 𝐹 n 𝑚 − c 𝜃 𝐹 n 𝑚 c 𝜃 𝐹 n 𝑚 s 𝜃 𝐹 n 𝑚 − s 𝜃 𝐹 n 𝑚 − 1 𝐼 S 𝐹 n 𝑟 𝐼 S − 𝐹 n 𝑟 𝐼 S 𝐹 n 𝑟 𝐼 S − 𝐹 n 𝑟 𝐼 S 𝐹 n 𝑟 𝐼 S − 𝐹 n 𝑟 𝐼 S 𝐹 n 𝑟 𝐼 S − 𝐹 n 𝑟 𝐼 S 1 𝐼 R W 0 1 × 8 | {z } B ( 𝜃 ) u (1) with the state vector x = h 𝑥 𝑦 𝜃 ¤ 𝑥 ¤ 𝑦 ¤ 𝜃 𝜔 R W i 𝑇 containing the sys tem’ s pose, v elocity and R W v elocity . The input vector is u bin = h 𝑢 0 𝑢 1 𝑢 2 𝑢 3 𝑢 4 𝑢 5 𝑢 6 𝑢 7 𝑢 8 i 𝑇 , where the first element is the R W’ s continuous torq ue 𝑢 0 ∈ R . The remaining eight elements are the binar y thruster activ ations 𝑢 1 . . . 8 ∈ { 0 , 1 } . An impor tant fact is that sy stems with on/off thr usters and a minimum firing time, also 1 Datasets: https://doi.org/10.5281/zenodo.18454916 2 Controller implementation: https://github.com/dfki- ric- underactuated- lab/mimpc Except where other wise noted, content of this paper is licensed under a Creative Commons Attribution 4.0 International License. The reproduction and distr ibution with attribution of the entire paper or of individual pages, in electronic or printed form, including any material under non-CC-BY 4.0 licenses is hereby granted b y the authors and respective copyright owners. 086 - 4 T able 2 REA CSA’ s phy sical properties 𝑚 𝑟 𝐼 𝑠 𝐼 𝑅𝑊 𝜔 𝑅𝑊 , max 𝐹 n 𝜏 max 𝑡 on,min 𝑡 on, max 𝑡 off,min 202 . 81 kg 0 . 35 m 12 . 22 kg m 2 0 . 047 kg m 2 ± 250 RPM 10 . 36 N 1 . 44 N m 100 ms 300 ms 200 ms kno wn as dw ell time constraint, can not alw ay s be brought to a full s top. Instead, a controller keeps them in a limit-cy cle around the targ et [12]. 3 Contr ollers The different MPCs compared in this w ork are all assembled using the f ollowing generic Optimal Control Problem (OCP): minimize u 0 ,. . . , u 𝑁 − 1 , x 0 ,. . . , x 𝑁 , e 𝑢, 0 ,. . . e 𝑢, 𝑁 − 1 , e 𝑥 , 0 ,. . . e 𝑥 , 𝑁 𝑁 − 1 𝑡 = 0 Q 𝑇 e 𝑥 ,𝑡 + W 𝑇 e 𝑢 ,𝑡 + Q f 𝑇 e 𝑥 , 𝑁 (2a) subject to x 𝑡 + 1 = x 𝑡 + Δ t Ax 𝑡 + Δ t B ( 𝜃 𝑡 ) u 𝑡 , ∀ 𝑡 ∈ { 0 , . . . , 𝑁 − 1 } , (2b) − e 𝑥 ,𝑡 ≤ x 𝑡 − ˆ x ≤ + e 𝑥 ,𝑡 , ∀ 𝑡 ∈ { 0 , . . . , 𝑁 } , (2c) − e 𝑢 ,𝑡 ≤ u 𝑡 ≤ + e 𝑢 ,𝑡 , ∀ 𝑡 ∈ { 0 , . . . , 𝑁 − 1 } , (2d) − 𝜏 max ≤ u 𝑡 , 0 ≤ 𝜏 max , ∀ 𝑡 ∈ { 0 , . . . , 𝑁 − 1 } , (2e) 0 ≤ u 𝑡 , 1 . . . 8 ≤ 1 , ∀ 𝑡 ∈ { 0 , . . . , 𝑁 − 1 } , (2f ) x lb ≤ x 𝑡 ≤ x ub , ∀ 𝑡 ∈ { 0 , . . . , 𝑁 − 1 } , (2g) x f,lb ≤ x 𝑁 ≤ x f,ub , (2h) x 0 = x estimated . (2i) where 𝑁 is the prediction hor izon and 𝑡 the discrete-time step index. State vector x 𝑡 and input v ector u 𝑡 ref er to the 𝑡 th future prediction. The diagonal weight matr ices Q , Q 𝑓 and W weight the absolute input and state er ror values o v er the prediction horizon. The auxiliar y v ectors e 𝑥 ,𝑡 and e 𝑢 ,𝑡 are constraint by (2c) and (2d) to tak e the absolute value of the state error (to target state ˆ x ) and inputs respectiv el y . By doing so, the OCP adopts an ℓ 1 -norm objectiv e and can be cas t as a Linear Program (LP), whic h is straightf or ward to sol v e. The f orward-Euler discretized and linear ized sys tem dynamics are enf orced b y (2b). The R W input torque is constrained b y (2e) and the thr uster inputs are limited to sta y between no-thr ust ( 0 ) and full-thrust ( 1 ) b y (2f). The flatfloor bounds, the R W’ s, and the sy stem’ s v elocity are constrained within the state-space by (2g). The recursiv e f easibility of the OCP is ensured b y constraining the ter minal state x 𝑁 via (2h) to be within a control in variant set as deriv ed in [9]. The first state x 0 is constrained to the cur rent state estimate b y (2i). The three MPCs that are der iv ed from (2) are listed in T able 3 and e xplained in the f ollo wing. T able 3 Different MPCs com pared in this w ork Controller Description Sol v er MIMPC Enf orces binary thruster inputs and timings explicitl y SCIP [13] continuous MPC Continuous MPC with Δ Σ -modulator CLP [14] binar y informed MPC Continuous MPC + information on ΔΣ -modulator firings in OCP CLP [14] Except where other wise noted, content of this paper is licensed under a Creative Commons Attribution 4.0 International License. The reproduction and distr ibution with attribution of the entire paper or of individual pages, in electronic or printed form, including any material under non-CC-BY 4.0 licenses is hereby granted b y the authors and respective copyright owners. 086 - 5 The first controller is the MIMPC whic h handles the binar y and timing constraints explicitl y in the OCP. By doing so, the OCP (2) becomes a Mix ed Integ er Program (MIP) which is NP -hard to sol v e. Pre vious anal yses hav e sho wn that often the optimal solution or at least a sub-optimal solution can be f ound f or 𝑁 = 20 within 0 . 1 s , hence allo wing real-time control with 10 Hz [8, 9]. The details on the MIMPC can be f ound in [9]. The second controller is the continuous MPC . Here the OCP (2) sta y s as stated. The LP can be sol v ed v ery efficiently , enabling a control loop frequency of more than 100 Hz . Consequentl y , the MPC outputs continuous thr uster activ ation v alues and does not respect the thr uster timing constraints. A ΔΣ - modulator con v er ts the continuous inputs into on/off v alues. Each thruster has its o wn modulator which switches the thruster s tate based on the integrated thr uster error 𝑢 𝑗 , er ror f or each thruster 𝑗 = 1 . . . 8 : ¤ 𝑢 𝑗 , er ror = 𝐾 𝑢 0 , 𝑗 − 𝑢 𝑗 , bin (3a) 𝑢 𝑗 , bin = ( 1 , 𝑢 𝑗 , er ror > 𝜖 0 , else (3b) where 𝑢 0 , 𝑗 is the continuous thr uster in put f or the cur rent timestep 𝑡 = 0 deter mined by sol ving (2). The actual binar y value 𝑢 𝑗 , bin is the modulator’ s output. The integ rator gain 𝐾 is set to 1 and the tr igg er threshold 𝜖 is set to the minimum activ ation time 𝑡 on, min f or simplicity . A dditional thr uster timing logic enf orces the thruster timing constraints; as soon as the modulator fires, the thr ust is maintained f or the minimum time. After the maximum thr ust fir ing time, the modulator will s top fir ing, and after each firing, the cool-down time is enf orced. T o compensate f or the f act that there is no w an unmodeled sub-system in the control loop, this work introduces the binar y inf ormed MPC as the third controller . The full Δ Σ -modulator cannot be modeled without making (2) a MIP again. Instead, w e onl y inf or m the continuous MPC about the cur rent state of the ΔΣ -modulator . This is achie ved by simulating the behavior of the ΔΣ -modulators forw ard along the prediction horizon 𝑁 at each control cy cle using the abo v e logic and the current thruster er rors. This results f or each thr uster 𝑗 in the ΔΣ -modulator -input ser ies 𝑢 𝑡 , 𝑗 , bin , 𝑡 = { 0 , . . . , 𝑁 − 1 } . Based on this series the dynamic constraint (2b) is altered to include the planned ΔΣ -modulator fir ings: x 𝑡 + 1 = x 𝑡 + Δ t Ax 𝑡 + Δ t B ( 𝜃 𝑡 ) u 𝑡 + Δ t B ( 𝜃 𝑡 ) u 𝑡 , bin , ∀ 𝑡 ∈ { 0 , . . . , 𝑁 − 1 } (4) where x 𝑡 and u 𝑡 remain the decision v ariables of the OCP and u 𝑡 , bin is not a decision v ar iable but the stac ked v ector of the f orward simulated modulator behavior f or all thr usters at the respective predicted timestep 𝑡 : u 𝑡 , bin = h 0 𝑢 𝑡 , 1 , bin 𝑢 𝑡 , 2 , bin 𝑢 𝑡 , 3 , bin 𝑢 𝑡 , 4 , bin 𝑢 𝑡 , 5 , bin 𝑢 𝑡 , 6 , bin 𝑢 𝑡 , 7 , bin 𝑢 𝑡 , 8 , bin i (5) Ov erall, these three controllers represent a spectrum of how tightl y binary actuation is coupled to the optimization problem. In the remainder of this work, we compare these three le vels of coupling in terms of computational effor t and closed-loop per f or mance under identical e xperimental conditions. In all three, the horizon is set to 𝑁 = 20 , and the discretization step to Δ t = 0 . 1 s . 4 Efficiency Analy sis T o assess each controller ’ s theoretical best perf or mance, each controller w as ev aluated ov er 5400 simulation e xper iments. In each e xperiment, the sys tem is initialized from the common initial state x 0 = [ 1 . 0 , − 0 . 5 , 𝜋 , 0 . 0 , 0 . 1 , 0 , 0 ] . (6) Except where other wise noted, content of this paper is licensed under a Creative Commons Attribution 4.0 International License. The reproduction and distr ibution with attribution of the entire paper or of individual pages, in electronic or printed form, including any material under non-CC-BY 4.0 licenses is hereby granted b y the authors and respective copyright owners. 086 - 6 The w eighting matrices in (2a) are chosen as Q = diag ( 1 , 1 , 0 . 12 , 𝜂 , 𝜂 , 0 . 12 𝜂 , 0 ) , Q 𝑓 = 𝜉 Q , (7) W = diag ( 0 . 0001 , 𝜅 , 𝜅 , 𝜅 , 𝜅 , 𝜅 , 𝜅 , 𝜅 , 𝜅 ) . (8) For eac h e xperiment, a single realization of 𝜂 , 𝜉 , and 𝜅 is sampled and then applied identicall y to all three controllers. The sampled parameters f ollo w 𝜂 ∼ U ( 0 , 0 . 5 ) , 𝜉 ∼ U ( 1 , 21 ) , 𝜅 ∼ U ( 0 , 0 . 6 ) . (9) Each controller’ s targ et is to reach the or igin, i.e., ˆ x = [ 0 , 0 , 0 , 0 , 0 , 0 , 0 ] . An e xper iment is deemed successful when the sys tem remains within a 0 . 1 m radius of the or igin f or a minimum of 40 s . Hereby , the value of 0 . 1 m is a result from [9] in which we derived the theoretical limit cy cle bounds for this sy stem, multiplied by a relaxation factor of 3 . The e xper iment is considered to be a failure if the tar g et has not been reached after 80 s . U pon successful completion, w e report the time tak en to reach the targ et and the a v erage Euclidean position er ror of the sys tem at the targ et. T o determine the efficiency , the av er ag e thrust er usag e is defined as the mean duty cycle across all thrusters. This is calculated by summing each thruster’ s total activation time ov er the duration of the e xper iment and normalizing it b y the product of the number of thr usters and the total e xper iment duration. The a verag e thr ust usag e is deter mined individuall y f or reaching the targ et and sta ying at the targ et. The simulated e xper iments are car r ied out under real-time conditions using the Drake toolbo x [15]. In simulation, the controllers run on an x86 desktop sys tem with an i9-10900K CPU with 10 cores, 3 . 7 GHz . As noted earlier , the LP can be sol v ed within a fe w milliseconds, hence the continuous and binary inf ormed MPCs are simulated at a control frequency of 100 Hz . In contrast, sol ving the MIMPC is NP -hard, so a control freq uency of onl y 10 Hz is targ eted, and the sol v er is ter minated after 0 . 1 s with a possibl y suboptimal solution, as described in [9]. 0.1 1 10 0.003 0.01 0.03 0.1 0.3 1 3 10 30 10 30 50 A verage thruster usage (%) average pos. error at tar get (m) time to reach tar get (s) Contr oller continuous MPC binary informed MPC MIMPC Fig. 2 A v erage position error after r eaching and while sta ying at the t arge t position (left) and time to reach the targe t position (right) for all com pared controllers plo tted ov er the a verag e thrust us- age. Single e xperiments ar e indicated b y small dots, and the Pareto-op timal experiments f or all con- trollers are depicted b y solid lines. Except where other wise noted, content of this paper is licensed under a Creative Commons Attribution 4.0 International License. The reproduction and distr ibution with attribution of the entire paper or of individual pages, in electronic or printed form, including any material under non-CC-BY 4.0 licenses is hereby granted b y the authors and respective copyright owners. 086 - 7 0.1 1 10 0.01 0.1 1 A verage thruster usage (%) average orientation error at tar get (deg) Contr oller continuous MPC binary informed MPC MIMPC Fig. 3 A v erage orientation of all controllers after reac hing and while doing st ation-k eeping. T o assess the controllers ’ efficiencies, the time to reach the targ et and the position er ror when sta ying at the targ et are plotted along with the a v erag e thr uster usages in Figure 2. The Pareto efficient e xper iments f or each controller are highlighted and connected to a P areto front. When compar ing the time to r eac h the targ et , all controllers sho w similar efficiency as the Pareto fronts ov erla y . Ho we ver , as indicated by the small dots representing non-Pareto-optimal experiments, the continuous MPC and the binar y inf or med MPC scatter much higher into the inefficient region. On the low thrust side of the plot, the continuous MPC needs an av erage thr us ter usag e of at least 8 % to reach the goal, which in this case, tak es 34 . 8 s . The MIMPC and the binar y inf or med MPC, in contrast, can use f e w er thr uster activations of minimum 3 . 7 % (MIMPC) and 3 . 8 % (binar y inf ormed MPC) and take 76 . 0 s and 70 . 9 s but still reach the targ et. On the high-thrust side, with a thr ust usag e of 18 % , the continuous MPC achie v es its minimum time of 7 s to reach the targ et. With higher thr ust usage and depending on tuning, the continuous MPC still reaches the goal without impro ving its perf or mance. Depending on the tuning, ho w ev er , it often becomes unstable and in multiple cases ev en ex ceeds the flat-floor limits. In contrast, the MIMPC and the binar y inf or med MPC can fur ther reduce the time to reach the goal with higher thr uster usage. The a v erage thruster activations are 22 . 6 % (MIMPC) and 22 . 8 % (binar y inf or med MPC) with a minimum time to reach the tar g et of onl y 6 . 1 s (MIMPC) and 6 . 2 s (binar y inf or med MPC). For the per f or mance at the targ et (i.e. station-k eeping), the difference in efficiencies is more distinct. The lo w est av erag e position er ror of 1 . 3 mm is reached b y the binar y inf or med MPC with an a v erag e thruster activ ation of 17 . 6 % . A g ain, the continuous MPC does not reach the goal with this high thruster usag e and theref ore only reac hes a minimum er ror of 1 . 4 mm at a thr uster usag e of 10 . 5 % . Notabl y , comparing the MIMPC in this high thrust region of roughl y > 2 % , its Pareto cur v e lies approximatel y 0 . 1 mm to 0 . 3 mm abo v e the one of continuous and binar y inf or med MPC. This indicates a slightly lo w er efficiency in this region f or the MIMPC. Ho we ver , at a thr ust usag e of roughly 2 % this switches (f or the binary inf or med MPC at a higher thr ust usage than the continuous MPC, making the latter more efficient in this region). For thr uster usag es belo w 2 % , the Pareto front of the MIMPC remains belo w that of both binary inf ormed and continuous MPC e x cept f or tw o outliers in which the P areto fronts of MIMPC and binar y inf ormed MPC intersect. The minimum thr us t usage of the continuous MPC at the target is 0 . 8 % , with an a v erag e position er ror of 8 . 4 mm . Both the MIMPC and the binary inf or med MPC reach this er ror , with a thr ust of roughly 0 . 2 % , making them more efficient. Ultimatel y , the binar y inf or med MIMPC reaches minimum thr ust usage of 0 . 1 % , with an a v erage position er ror of 1 . 1 cm , whereas the Except where other wise noted, content of this paper is licensed under a Creative Commons Attribution 4.0 International License. The reproduction and distr ibution with attribution of the entire paper or of individual pages, in electronic or printed form, including any material under non-CC-BY 4.0 licenses is hereby granted b y the authors and respective copyright owners. 086 - 8 MIMPC achie ves the same er ror with onl y 0 . 06 % of thr uster usag e. The lo wes t thr us t usage of 0 . 04 % at the targ et is achiev ed b y the MIMPC, where it has an av erage position er ror of 1 . 4 cm . N otabl y , in the lo w er thr ust region, the points on the Pareto fronts of the respectiv e controllers are relativ ely sparse. For the continuous and the binary inf ormed MPC, e v en the P areto non-optimal experiments become very sparse in this region. The av erage or ientation errors at the targ et f or all experiments are depicted in Figure 3. For an a v erage thr uster usage of < 5 % , all controllers hav e an a v erage er ror of less than 0 . 5 ◦ . Ho we v er , since the fir ing of a single thr uster alw a y s affects the or ientation, higher thr uster usage leads to an increase in orientation er ror , reaching up to appro ximately 1 . 8 ◦ . 5 Ev aluation on the Real Sy stem Fig. 4 Carrying out experiments at the OR GL - Imag es sho w the transition of the platform from the starting point to the origin in reading direction -1 0 1 -0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 x ( m ) y ( m ) floor height (mm) -0.48 0.00 0.96 Controller bin. inf. MPC MIMPC -0.05 0.00 0.05 -0.04 0.00 0.04 -0.05 0.00 0.05 x ( m ) y ( m ) bin. inf. MPC MIMPC Fig. 5 Resulting tra jectory of REA CS A under control of the MIMPC and the binary inf ormed MIMPC. The left plot sho ws the whole tra jectory along with the small height v ariations of the oth- erwise flat floor , which introduce disturbances. The right plots zoom into the limit cy cle at the t arg et. Except where other wise noted, content of this paper is licensed under a Creative Commons Attribution 4.0 International License. The reproduction and distr ibution with attribution of the entire paper or of individual pages, in electronic or printed form, including any material under non-CC-BY 4.0 licenses is hereby granted b y the authors and respective copyright owners. 086 - 9 Since the binar y inf or med MPC outper f or ms the purely continuous MPC in the pre vious anal ysis and the latter w as uns table in cer tain scenar ios, only the MIMPC and the binar y informed MPC are e v aluated and compared on the real sys tem. In both e xper iments, the platf orm is positioned at the s tar ting point ( 𝑥 = 1 . 14 m , 𝑦 = 3 . 14 m , 𝜃 = 90 ◦ ) . An operator then activ ates the air bearings manuall y , f ollo wed b y activ ating the respectiv e controller . The goal is to reach the or igin at the floor’ s center point and de-rotate the platf or m to 𝜃 = 0 ◦ . After REA CS A has reached the origin, the controllers are k ept activ e f or another 20 s to s tudy their limit cy cle beha viors. An e xemplary e xper iment is sho wn in Figure 4. The controllers ha v e been both manually tuned with the same w eights. MIMPC binary informed MPC Reac hing the tar g et Time to reac h (s) 51.268 25.209 T otal thrust usag e (s) 4.90 7.51 A v erage thrust usag e (%) 1.2 3.7 Limit cycle at the tar g et A v erage position error (cm) 1.824 0.853 A v erage orientation er ror (deg) 0.176 0.419 A v erage thrust usag e (%) 1.4 6.0 T able 4 Results from experiments on the real system The resulting trajectories of REA CS A under both control law s are sho wn in Figure 5. T able 4 contains the per f or mance measures respectiv el y . V ideos of the e xperiments are av ailable online 3 . Due to the L1-nor m cos t function, both controllers f ollow an L -shape tow ards the goal, as it encourages minimizing the er ror on all ax es independently . The MIMPC f ollow s a more r igid L -shape compared to the binar y informed MPC. Ov erall, the binar y inf or med MPC reaches the targ et of 10 cm in 25 s , which is twice as f ast as the MIMPC, though it uses three times more thrust than the MIMPC. The binary-inf or med MPC initially exhibits a lar g e oscillation and then settles into a small limit cy cle around the targ et. The resulting mean position er ror at the targ et is less than 1 cm , while the thr usters fire on a v erage 6 % of the time. The MIMPC reaches the targ et and directl y conv erg es to its limit cy cle. Since this cy cle is larg er , the resulting a v erage position error is approximatel y twice that of the binary inf or med MPC. Ho w e v er , it also fires the thr usters on a verag e f or only 1 . 4 % of the time, which is about f our times less than the binary-inf or med MPC. Both controllers s tabilize the or ientation b y effectiv el y combining the R W and the thrusters, achie ving an av erage er ror below 0 . 5 ◦ . The MIMPC achie v es an er ror of 0 . 18 ◦ , which is less than half that of the binary-inf or med MPC. 6 Discussion The results highlight when it is advantag eous to e xplicitly consider binar y thrusters and timing constraints within a controller . All controllers ha ve a similar perf or mance in reac hing the tar g et. The continuous MPC, ho we ver , may become unstable and can e v en e x ceed constraints in high-thr ust config- uration. Fur ther more, in lo w-thrust configuration, onl y the binary inf or med MPC and the MIMPC are capable of reaching the tar get. Dur ing station k eeping at the targ et, in high-thrust regimes, all compared controllers achie ve the mos t efficient e xper iments with similar per f or mance. The continuous and binar y inf or med MPC are ev en a bit more efficient in that region. This is probabl y due to the higher control frequency and the f act that the MIMPC does not alw ay s sol v e to optimality . The difference, ho w e v er, is minimal and negligible. Since the continuous MPC in lo w -thr ust tuning does not reach the targ et, onl y the binar y inf ormed MPC and MIMPC are successful in station keeping with lo w-thrust usage. 3 https://youtu.be/briBzeDHmGs Except where other wise noted, content of this paper is licensed under a Creative Commons Attribution 4.0 International License. The reproduction and distr ibution with attribution of the entire paper or of individual pages, in electronic or printed form, including any material under non-CC-BY 4.0 licenses is hereby granted b y the authors and respective copyright owners. 086 - 10 Ne v er theless, in lo w -thrust regimes, e xplicit treatment of binar y inputs and thr uster timings within the MIMPC is advantag eous, as the results indicate that MIMPC remains the most efficient controller in this operating range. Fur ther , the scattering of the P areto non-optimal points indicates that in the ma jor ity of e xper iments, the continuous and binar y inf or med MPC achie v ed high thr ust and not alwa y s minimal er ror , despite the w eights being the same as f or the MIMPC. Conseq uentl y , ac hie ving lo w -thrust usage at the targ et is more challenging with the binar y inf ormed and, especially , the continuous MPC, requiring more careful tuning compared to the MIMPC. In summary , it can be said that the binar y inf or med MPC is super ior to the purel y continuous MPC. With negligible additional computing operations, the g ap in efficiency betw een the binar y inf ormed MPC and the MIMPC is reduced. The results on the real sys tem sho w that the binar y inf or med MPC works w ell in reality . It ev en per f or med better than MIMPC, although it consumed more thr ust. Therefore, a definitive assessment of efficiency on the real sy stem is not possible, requiring more e xper iments and more precise tuning. From a practical perspective, the choice of controller depends on mission constraints. If lo w computational cost or a very high accuracy is required, the binar y inf or med MPC remains attractiv e as the MIMPC pro vides no benefit. On the other side, if robus tness and fuel efficiency are impor tant, f or e xample, in long-duration or resource-constrained missions, then e xplicitly f or mulating the problem as a MIP is adv antag eous. Another point regarding computational comple xity is that the continuous f or mulation still lea ves “room” f or additional comple xity . For ex ample, a quadratic cost function, which is in some sense more natural, could be advantag eous and should be e xplored in future w ork. Other features, such as path f ollo wing, a longer prediction hor izon, or obstacle av oidance, could also be incorporated more easil y . The MIMPC, on the other hand, is already close to the limit of what is computationall y f easible. 7 Conclusion This paper compared three control strategies for binar y thruster sy stems on ES A ’ s REA CS A plat- f or m: a direct MIMPC, a continuous-input MPC with Δ Σ -modulation, and a binar y inf or med MPC that incor porates predicted ΔΣ -modulator fir ings into the OCP. The continuous MPC per f orms reliabl y only at higher thr ust utilizations and entails a r isk of unstable behavior or ev en constraint violations. The binary-inf or med MPC reduces this issue b y inf or ming the OCP f ormulation about the modulator ’ s effect within the prediction hor izon. With substantiall y lo w er computational effor t than the MIMPC, it can approach it in efficiency , while also removing the instability r isk. Ho we v er , in v er y low -thr ust regimes, e xplicitly managing on/off decisions and timing constraints with MIMPC reduced thruster usag e f or a giv en steady -state accuracy , thereb y maximized thr ust efficiency . Experiments on the real sys tem were consistent with the simulations. W ith identical w eights, the binar y inf or med MPC reached the goal region f aster (about 25 s vs. 51 s f or MIMPC) but at higher thr uster usage (about 3 . 7 % v s. 1 . 2 % ). In steady state, the binar y inf or med MPC produced a smaller position error (about 0 . 85 cm vs. 1 . 82 cm ), while the MIMPC yielded a smaller a v erage orientation er ror (about 0 . 18 ◦ vs. 0 . 42 ◦ ). Ov erall, when computational resources allo w , e xplicitl y f or mulating the binar y decision process (MIMPC) is advantag eous in lo w-thrust and resource-constrained scenar ios. If sol v er comple xity is a concern, incor porating modulator -aw are predictions into a continuous OCP is a practical alter nativ e that recov ers much of the robus tness obser v ed with MIMPC while retaining efficient LPs. Future w ork can e xplore the potential of the binar y inf or med MPC, f or instance, through more comprehensiv e task specifications (such as path f ollowing or obstacle a v oidance) and enhanced hor izon/cost designs. A dditionall y , the amount of inf or mation provided b y the modulator to the MPC, such as when fire breaks are enf orced, could be increased. Except where otherwise noted, content of this paper is licensed under a Creative Commons Attribution 4.0 Inter national License. The reproduction and distr ibution with attribution of the entire paper or of individual pages, in electronic or printed form, including any material under non-CC-B Y 4.0 licenses is hereby granted by the authors and respective copyright owners. 086 - 11 A c kno wledgment This w ork is par tiall y funded b y the projects: CoEx (grant number 01IW24008) funded by the German Federal Ministry for Education and Researc h, and A ctGPT (grant number 01IW25002) funded by the Federal Ministry of Researc h, T echnology and Space (BMFTR,) and is suppor ted with funds from the f ederal state of Bremen f or setting up the Underactuated R obotics Lab (265/004-08-02-02-30365/2024- 102966/2024-740847/2024). Special thanks go to Francesca Bocconcelli, Magnus Bøgh-Larsen, and Jules N oirant f or their help with the experiments at the OR GL. Man y thanks also to the Robotics Section of the European Space Ag ency f or the wonderful collaboration. Declaration of Use of Artificial Intellig ence Ar tificial Intellig ence w as used to proofread and translate par ts of this paper . R ef erences [1] Bong Wie. Space v ehicle dynamics and contr ol . Aiaa, 1998. [2] Katsuyoshi T sujita. A f easible study on the model predictive control f or docking approach of small spacecraft using thr us ters and a control moment gyro. In 2023 IEEE/ASME International Confer ence on Adv anced Intellig ent Mechatr onics (AIM) , pages 696–701. doi: 10.1109/AIM46323.2023.10196262 . [3] A vijit Banerjee, Sumeet G Satpute, Christof oros Kanellakis, Ilias T ev etzidis, Jakub Haluska, P er Bodin, and Georg e Nik olak opoulos. On the design, modeling and experimental verification of a floating satellite platf or m. IEEE Robotics and Automation Lett ers , 7(2):1364–1371, 2022. [4] Richard Zappulla, Josep Vir gili-Llop, and Marcello R omano. Spacecraft thruster control via sigma–delta modulation. Journal of Guidance, Contr ol, and Dynamics , 40(11):2928–2933, 2017. [5] Anton Bredenbeck, Shubham V yas, Martin Zwick, Dor it Borr mann, Miguel Oliv ares-Mendez, and Andreas N üchter . T rajectory optimization and f ollowing f or a three degrees of freedom ov eractuated floating platf or m. In 2022 IEEE/RSJ International Confer ence on Intellig ent Robo ts and Syst ems (IROS) , pages 4084–4091. doi: 10.1109/IR OS47612.2022.9981294 . [6] Pantelis Sopasakis, Daniele Ber nardini, Hans Strauc h, Samir Bennani, and Alber to Bemporad. A h ybr id model predictiv e control approach to attitude control with minimum-impulse-bit thr us ters. pages 2079–2084. doi: 10.1109/ECC.2015.7330846 . [7] Mirko Leomanni, Andrea Gar ulli, Antonio Giannitrapani, and F abr izio Scortecci. All-electr ic spacecraft pre- cision pointing using model predictiv e control. 38(1):161–168. ISSN: 0731-5090. doi: 10.2514/1.G000347 . [8] Franek Stark, Shubham V y as, Georg Sc hildbach, and Frank Kirchner . Linear model predictiv e con- trol f or a planar free-floating platform: A compar ison of binary input constraint f or mulations. In Pro- ceedings of 17th Symposium on Adv anced Space T echnologies in Robo tics and Automation , v olume 17. doi: 10.48550/arXiv .2312.10788 . [9] Franek S tark, Shubham V yas, Georg Schildbac h, and Frank Kirchner . Mix ed integer model predictiv e control for a free-floating platf or m with binary and continuous actuation. In Pr oceedings of the 2024 {CEAS Eur oGNC} conf er ence , v olume 2024. doi: 10.82124/CEAS-GNC-2024-013 . [10] Mar tin Zwick, Irene Huertas, Levin Gerdes, and Guillermo Or tega. OR GL – ES A’ s test facility f or approach and contact operations in orbital and planetar y environments. In Proceedings of the International Symposium on Ar tificial Intellig ence, Robo tics and Automation in Space (i-SAIRAS) , v olume 6. Except where other wise noted, content of this paper is licensed under a Creative Commons Attribution 4.0 International License. The reproduction and distr ibution with attribution of the entire paper or of individual pages, in electronic or printed form, including any material under non-CC-BY 4.0 licenses is hereby granted b y the authors and respective copyright owners. 086 - 12 [11] Willem Suter , Gunter Just, and Mar ti Vilella. REA CS A: A ctuated floating platf or m f or orbital robotic concept testing and control software dev elopment. In Proceedings of 17th Symposium on Advanced Space T ec hnologies in Robotics and Automation 2023 , volume 17. [12] Jer r y Mendel. Perf or mance cost functions f or a reaction-jet-controlled sys tem dur ing an on-off limit cy- cle. 13(4):362–368. ISSN: 1558-2523. Conference Name: IEEE T ransactions on Automatic Control. doi: 10.1109/T A C.1968.1098940 . [13] Suresh Bolusani, Mathieu Besançon, Ksenia Bestuzhev a, Antonia Chmiela, João Dionísio, Tim Donkie wicz, Jasper van Door nmalen, Leon Eifler, Mohammed Ghannam, Ambros Gleixner , Christoph Graczyk, Katr in Halbig, Ivo Hedtke, Ale xander Hoen, Christopher Hojny , Rolf van der Hulst, Dominik Kamp, Thorsten K och, Ke vin K ofler , Jurgen Lentz, Julian Manns, Gioni Me xi, Er ik Mühmer , Marc E. Pfetsc h, Franziska Schlösser , F elipe Serrano, Y uji Shinano, Mark T ur ner , Stef an Vig erske, Dieter W eninger , and Lixing Xu. The SCIP Optimization Suite 9.0. ZIB-Report 24-02-29, Zuse Institute Berlin, Februar y 2024. https://nbn- resolving.org/urn:nbn:de:0297- zib- 95528 . [14] John For rest, Stef an Vig erske, T ed Ralphs, John Forrest, Lou Haf er , jpfasano, Haroldo Gambini Santos, Jan- Willem, Matthe w Saltzman, a andre, Bjar ni Kr istjansson, h-i gassmann, Alan King, Arev all, Bohdan Mar t, Pier re Bonami, R uan Luies, Samuel Brito, and to st. coin-or/clp: Release releases/1.17.10, A ug. 2024. doi: 10.5281/zenodo.13347196 . [15] Russ T edrak e and Drake-De velopment- T eam. Drak e: Model-based design and verification f or robotics. https://drake.mit.edu .
Original Paper
Loading high-quality paper...
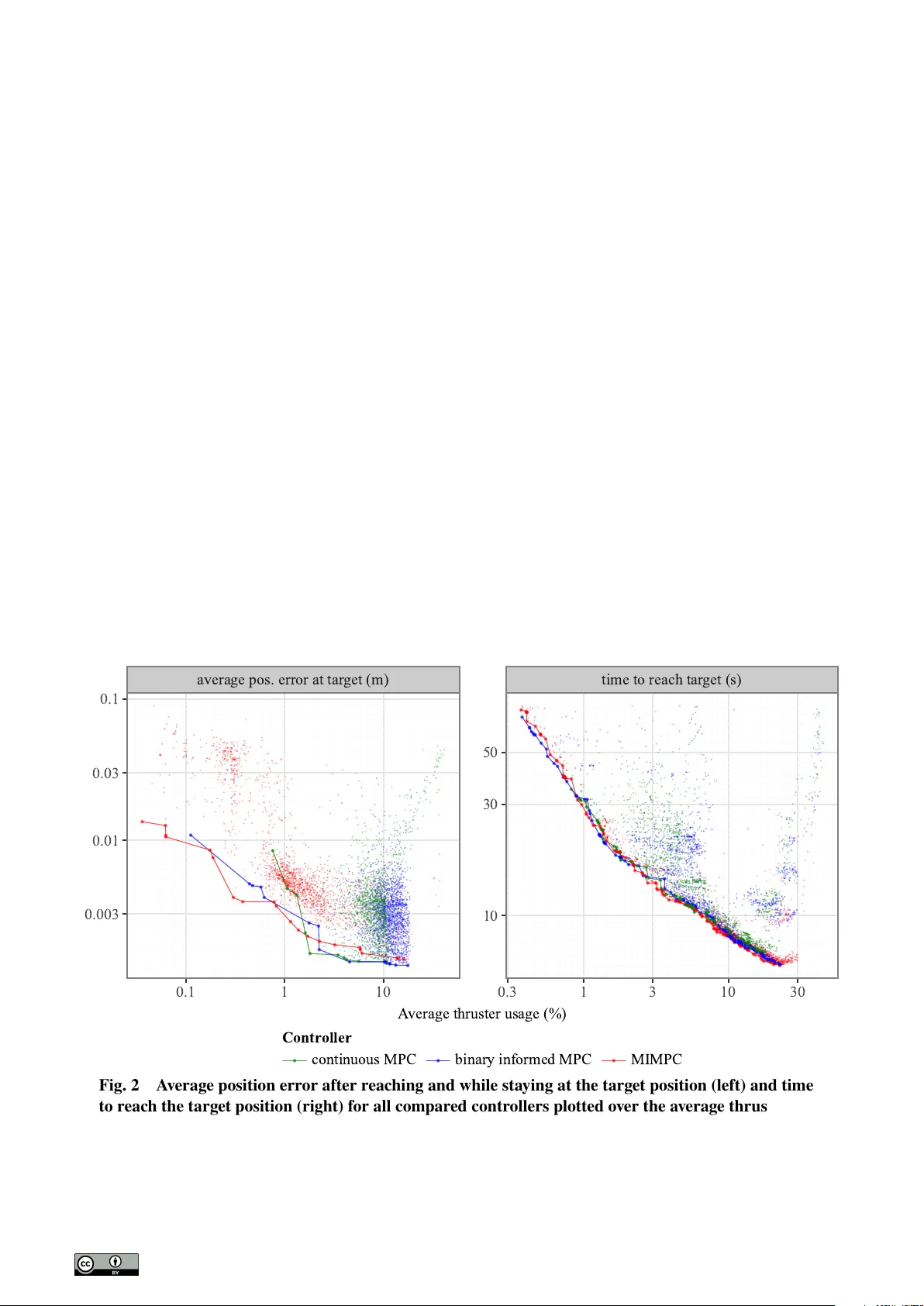
Comments & Academic Discussion
Loading comments...
Leave a Comment