ARYA: A Physics-Constrained Composable & Deterministic World Model Architecture
This paper presents ARYA, a composable, physics-constrained, deterministic world model architecture built on five foundational principles: nano models, composability, causal reasoning, determinism, and architectural AI safety. We demonstrate that ARY…
Authors: Seth Dobrin, Lukasz Chmiel
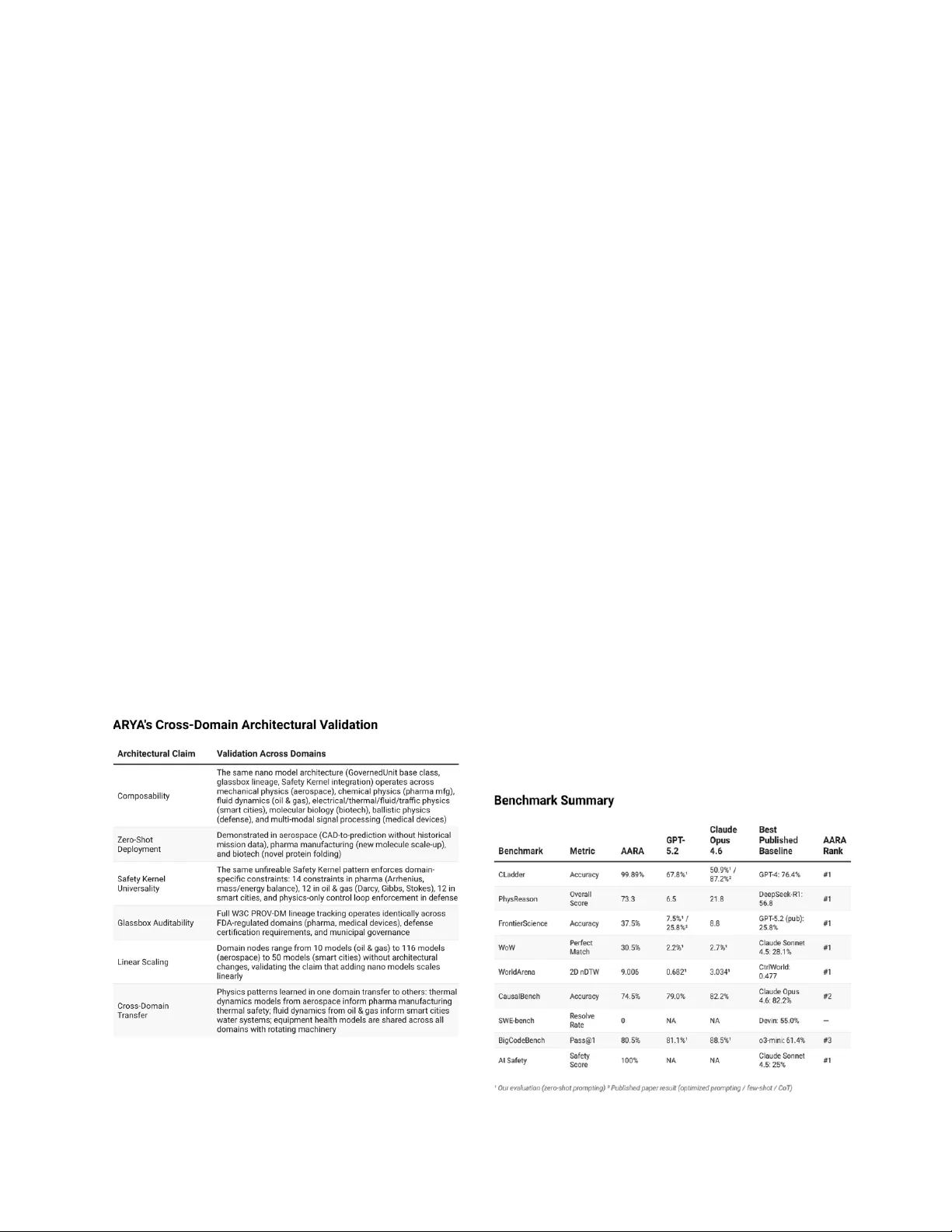
ARYA: A Physics-Constrained Composable & Deterministic World Model Architecture Seth Dobrin, PhD CEO | ARYA Labs seth@aryalabs.io Lukasz Chmiel CTO | ARYA Labs lukasz@arya labs.io Abstract This paper presents ARYA, a composable, physics - constrained, deterministic world model architecture built on five foundational design principles: nano models, composability, causal reasoning, determinism , and architectural AI safety. We demon strate that th e platform satisfies the formal requirements established by the world model research community, including state representation, dynamic prediction, causal and physical awareness, temporal consistency, generalization, learnability, and applicability to pl an ning and control. Unlike monolithic large language models, ARYA implements these capabilitie s through a hie rarchical system - of - system - of - system s of specialized nano models orchestrated by AARA (ARYA’s Autonomous Research Agent), an always - on cognitive daemon that operates a continuous sense - decide - act - learn lo op. The nano model architecture provides linea r s caling, sparse activ ation (invoking only task - relevant models), selective untraining, and sub - 20 - secon d training cycles. Comb ined, these properties reso lve the traditional tension between capability and com putational efficiency. A central contribution is the “Unfireable Safety Kernel”, an archite cturally immutable safety boundary that cannot be turned o ff, bypassed, or circumvented by any component of the system, including its own self - improvement engine. This layer is not a statement on social or e thical alignment; rather, it is a technical framework for ensuring that human control and governance are maintained as the system’s autonomy increases . Safety i s not a p olicy layer applied after the fact; it is an architectural constraint that governs every operation the system performs. We present the formal alignment between ARYA’s architecture and the canonical world model requi rements, summarize its state - of - the - art performance across 6 of 9 competiti ve benchmarks, and describe its deployment across seven acti ve industr y domain nodes (aerospace, pharma manufacturing, oil & gas, smart citi es, biote ch, defense, and medical devices), and report empirical evaluati on on nine external b enchmarks where AARA achieves state - of - the - art on six — including causal reasoning, physics reasoning, PhD - level scie nce, enterprise work flows, embodied p lanning, and AI safety — with zero neural network parameter s). 1. Introduction The development of AI systems that can reason abou t the world, predict the conseq uences of actions, and continuously improve their own capabilit ies represents one of the central challenges in computer science. At the core of this challenge is the pursuit o f world mode ls: internal representation s that enable an agent to simulate the environment's dyna mics, predict future states, and plan actions without direct interaction with the real world [1] [2] [3]. A system that genuinely understands the dynamics of it s operating environment, and one that merely correlates patterns in training data while modeling causal structure, ph ysical constraints, and temporal evolution, has the foundation for autonomous rea soning, planning, and self - improveme nt. The ARYA platform is ARYA Labs’ answer to this challenge. It is a governed, safety - first framewor k bu ilt around a composable world model architecture that serves m ultiple industry domains. The system also features self - improvem ent, cross - domain generalizat ion, and auto nomous goal generat ion as operational capabilities. This is all governed by formal safety constraints. The system is not a r esearch prototype; it is deployed in production across three industry domain nodes and ca n suppo rt million s of specialized nano models that are trained and operational. This white paper makes three primary contributions: 1. Formal World Model Alignment : We dem onstrate that A RYA satisfies a ll seven can onical requirements for a world model: s tate representation, dynam ics prediction, cau sality and physics awareness, temporal consistency, generalization, learnability and updateability, and use for planning and control, through an architecture t hat is fundamentally different f rom the monolith ic neural network approa ches that dominate current world model research. 2. Safety and Governance Architecture : We descr ibe the system’s six - level auto nomy framework (A1 - A6), seven advanced autonomous engines, and the architecturally unfireable Safety Kernel that governs all syst em operations. 3. Production Validation : We present evidence from seven active industry dom ain nodes in w hich the world model architecture is deployed in production, demonstrating that the approach generalizes across radically different domains, from spacecraft missio n planni ng to pharmace utica l manufact uring, oil & gas productio n, smart city infrastructure, precision medicine, defense guidance systems, and medical device digital twins. The physics - first arch itecture ena bles zero - sho t deployment to new domains without requiring historical customer data, eliminating the cold - start problem that c onstrains data - dependent AI systems. 2. Background: World Models and Autonomous Intelligence 2.1 The World Model Paradigm The concept of a w orld model in AI traces its origins to the o bservation that biological a gents do n ot intera ct with the world solely through trial and error. Instead, they maintain internal mod els that allow them to simulate potential actions, predict the ir con sequences, and select behavi ors that optimize their objectives, a capacity sometimes described as “mental simulation” or “imagination” [1] [6]. Ha and Schmidhuber formalized this intuition in their seminal 2018 work, proposing a three - component architecture: a variational autoencoder (VAE) that compresses observations into a latent state, a recurrent neural network (MDN - RNN) that predicts how the latent state evolves, and a controller that selects actions based on the learned dynamics [1]. Thi s architecture demonstrated that agents could learn effective policies by “dr eaming” training entirely within the learned world model r ather tha n the rea l env ironment. LeCun extended this framework in his 2022 position paper, proposing the Joint Embedding Predictive Architecture (JEPA) as the basis for autonomous machine intellig ence [2]. LeCun’s arc hitecture decomposes an autonomous agent into six interacting modules: a Configurator that sets objectives, a Perception module that encodes observations, a World Model that predicts future states, a Cost Module that evaluates outcomes, an Actor that proposes actions, and a Short - Term Memory that maintains state. Critically, L eCun argues that the world model is “the most complex piece” of t he architect ure and should predict in abstract representation space rather than pixel space. Hafner et al. bro ught world models to practical maturi ty with DreamerV3, published in Nature in 2025, demonstrating a single general algorithm that masters over 150 diverse tasks through learned latent dynamics [3]. D reamerV3’s arch itecture, comprisin g an encoder, a Recurrent State Space Model (RSSM), a decoder, a reward predicto r, and an actor - critic, establis hed the template for modern w orld model systems. 2.2 Formal Requirements f or World Models Drawing from the academic literature and the practical requirements of d eployed systems, we identify seven core requirements that a system must satisfy to qualify as a world model beyond simple pattern recognition: 2.3 The Four Canonical Components Modern world model ar chitectures typically decompose into four interac ting module s [1] [2] [3]: 1. Perception/Observati on Model : E ncodes raw observations (images, sensor streams, text) into a latent state representatio n. 2. Latent Dynamics Model : Pre dicts how the latent state evo lves under pro posed action s. 3. Reward or Cost Model : Predicts rewards, costs, or task - specific signa ls for ev aluating action sequences. 4. Controller/Planner : Uses the intern al simulator to test candidate action seq uences and select those that optimize a goal or reward. 3. System Architecture Overview ARYA is organized into six architectural layers, each serving a distinct function in the overall cognitive architecture: The architecture follows a federated domain design pattern organized around domain nodes. These are the primary units through which ARYA learns, specializes, and grows. Each domain node (e.g., aerospace, biotech, energy) operates as an independent system -of- systems with its own specialized AARA implementation, nano model system, and constraint set, while sharing the core framework, safety infrastructure, and cross - domain knowledge transfer mechanisms. Domain nodes are not merely deploymen t targe ts; the y are the mechanism by which ARYA acquires new phys ics, domain exp ertise, and operational patterns. When ARYA enters a new industry, it instan tiates a new domain node, populates it with the relevant physics solvers and domain constraints, and begins learning fr om operational data . This process expands the system ’s total k nowledge without disturbing existing domain nodes. Independen t, isolated custo mer domains are appe nded to their respective dom ain node, allowing them to remain comp letely isolated from one anothe r while retaining the bene fits of the larg er foundation . From the customer’s perspective, they are part of the foundation model; from anyone else’s perspectiv e, any give n customer is not. 4. ARYA as a World Model: Formal Alignment This section constitutes the central technical contribution of this paper. We dem onstrate that ARYA satisfies all seven canonical world model requirements, not through a single monolithic neural network, but through a compo sable architecture of specia lized nano models, a context - aware orchestrator, and a mu lti - layered constraint system spanning phy sics, m eta - learning, and sim ulation. 4.1 Requirement 1: State Representation A world model must maintain an internal representation of the en vironment state, often in a compressed or latent form that captures what matters for pre diction an d control. ARYA maintains state representation through three complementary mechanisms: Con text Network. The Context Network maintains the complete state of each domain, including entities, relationships, constraints, and provenance metadata. Each node in the graph re presents a domain concept (e.g., a structur al component, a financial instrument, a physiological signal), and edges represent dep endencies, constraints, and causal rel ationships. The graph s upports undo/redo history, validation, and change tracking, provid ing a rich, structured state representation that goes far beyond the flat latent vectors use d in conventional w orld models. Critically, the Context Network implements a brain - like system - of - system - of - systems architecture to mai ntain all relationships and understanding. Just as the human brain organizes cognition through nested hierarchies — neurons within circuits, circuits within regions, regions within networks — it o rganizes kno wledge thr ough nested domain graphs, each of which may contain sub - graphs representing specialized subsystems. A domain node (system) contains domain - specific subgraphs (systems of systems), wh ich in turn contain individual nano - model context s and their interdepende ncies (systems of systems of system s). This hie rarchical n esting reduces the effective complexity of any single reasoning operation. Rather than reasoning over the entire global state, the system navigates the hierarchy to the relevant level of abstraction and activates only the context subgraph needed for the current task. The result is that context management scales with the depth of the hierarch y (logarithmically) rather than with the total number of entities (linearly or worse). This property mirrors the efficiency of biological neural organizati on. Belief Network. The Belief Network has been tested with over one million nodes. It represents the system’s epistemic state: what it knows, what it is uncertain about, and where knowledge gaps exist. Evidence updates propagate at rates exceeding 10,000 per second, enabling real - time state refineme nt. Nano Model Latent Spaces. Each nano model in the system maintains its own domain - specific latent representation. A ph ysics solve r for structural analysis encodes material properti es, geometric constraints, and load distributio ns. A neural network for fetal heart rate detection encodes signal features, temporal patterns, and clinical thresholds. The orchestrator coordinates these per - model latent spaces to form a coherent composite state. Unlike conventional world models that Compressing all observations into a single latent vector [1, 3] is the opposite of ARYA’s approach, wh ich is composable and structured, preserving semantic relationships between d omain concepts rathe r than collapsing them into an opaque embedding. 4.2 Requirement 2: Dyna mics Prediction A world model must predict how the state changes over time given actions ( s_t,a_t ) → s_(t+1). Dynamics predicti on in ARYA operates at multiple levels. Domain - level dynamics: each nano model encodes the dynamics of its specific dom ain. Physics solvers predict how structural loads propagate through a CAD assembly, and signal processing models predict how fetal heart rate p atterns evolve. T hese are not statistical correlations; they are physics - constrained predictions grounded in domain - specific first principles. Self - Improvemen t dynamics: Predictive assessment for the S elf - Improvem ent engine, simulating anticipated results before implementing self - improveme nt suggestions. T his functions sim ilarly to the “im agination” or “dream ing” feature in DreamerV3 [3], but is applied to the system’s ar chitecture rather than game environm ents. Cross - domain dynamics: Coordination of dynamic prediction across domains, using UCB1 (Upper Confidence Bound) resource allocation to predict which improveme nt tra jectories will yield the highe st expected value across the ent ire federated archit ecture. 4.3 Requirement 3: Causality and Physics Awareness A world model should encode structured, often causal relationships and ph ysical regularities, enabling reasoning about interventions and “what if” scenarios. This is where ARYA diverges most sharply from conventional world models. Rather than l earning causal structure implicitly from data, ARYA derives causal understanding from four complementary mechanisms. This multi - layered causa l architecture is empirically validated in Section 11, where AR YA achieves 99.89% accuracy on the CLadder benchmark, surpassing all models. Physics Constraints as Hard Filters . Phy sics con straints are implemented as architectural filters in the Constraint Layer rather than as soft penalties in a loss function. In the aerospace domain , for example, CAD designs generated by nodes must satisfy material strength equations, geometric tolerances, and manufact urabilit y rules. These constraints are not learned; they are encoded as deterministic validation functions that reject any output tha t v iolates physical laws. This approach provide s mathematical certainty rather than statistical likelihood. Causal Understanding Through Simulation. ARYA’s Simulation Unit is the primary mechanism through which the world model understands cause and effect. Before any action is executed, the Simulation Unit models the anticip ated chain of consequences by propagating the proposed intervention through th e Context Network’s dependency structure and simulating downstream state transitions. This is causal reasoning in the interventionist sense, as defined by Pearl [8]: the system can answer “what if” questions not mere ly by looking up static rules, bu t by actively simulating the causal chain triggered by an intervention across the full system state. The Context Network’s dependency - based topological sort orchestr ation ensures that these simulations respect the domain's true causal ordering. Causal Refinement Through Meta - Learning. Meta - learning and self - imp rovement add a second laye r of causal understanding by learning which causal pathways matter most across improvement cycles. As the system observes the outcomes of its own interventions, it refines its understand ing o f the syst em ’s causal dynamics. This meta - learning process means that the system’s causal re asoning improves ove r tim e: it con tinuously discovers and validates new causal structures through experience. Glassbox/CDAI Compliance. The Constrained Deterministi c AI ™ (CDAI) framew ork ensures that safety - critical decision paths use fully transparent, auditable model ar chitectures (rules engines, physics solvers, linear models) rather than opaque neural networks. This provides not just causal awareness but causal transp arency, enabling every prediction to be traced to its causal antecede nts through the simulatio n and meta - learning pat hways that pr oduced it. 4.4 Requirement 4: Temporal Consistency A world model must handle sequence s, remember past states, and ensure coherent temporal evolution. Temporal consistency is maintained through several mechanis ms, central to this is a Lineage Store. Every system output is recorded in the Lineage Store with complete provenance, including the input data, model versions, pa rameters, and intermediate computa tions. This creates a tem porally consistent aud it trail that can be replayed, compared, and analyzed. ARYA’s Autonomous Research Agent (AARA) Continuous Loop. AARA operates as an always - on daemon executing a continuous sense - decide - act - learn loop. The Perception Layer detects eve nts (file system changes, scheduled tasks, webhooks); the Decision Core evaluates policies and consults the Belief Network; the Action Dispatcher executes authorized actions; and the Learning feedback loop updates the Prediction Un it and Belief Network. This loop maintains temporal coherence by ensur ing that every action is gr ounded in the current state and that every state update reflects the o utcomes of previous actions. Belief Network Temporal Upda tes. The Belief Network supports real - time evidence updates at rates exceeding 10,000 per secon d, enabling the system to main tain a temporally consistent prob abilistic model of its operating environment. 4.5 Requirement 5: Gene ralization A world model should support transfer to novel situations by modeling environment mechanics rather than memo rizing specific trajectories. ARYA achieves generali zation through three architectural choices. Federated domain architecture : The same architectural patterns that apply at the global level apply to each domain node: governance, safety mechanis ms, and improvement processes apply across manufact uring, medical dev ices, space, biot echnology, and fusion. Cross - domain knowledge transfer : By defining physics within the world model rather than enabling it to learn physics conceptually, once an aspect of physics is known, the entire system inherits it. As the system improves on its understand ing of that aspect of physics, the entire system inherits it. Once defined , these physics models are transfer able acros s all relev ant domains: Newtonian physics remains Newtonian physics, biophysics remains bi ophysics, and quantum physics remains quan tum physics. Third, nan o model composability: because the world model is composed of specialized nano models rather than a single monolithic network, generalization to new situations can be achieved by composing existing models in novel configurations rather than retraining the entire system. The nano models are self - assem bling an d will reorganize as needed. 4.6 Require ment 6: Learnability and Updateability A w orld model must be learnable from data and updatable as new experiences arr ive, refining its understanding of envir onmental dynamics. ARYA is not merely learnable — it is s elf - improvin g. It continuously proposes, evaluates, validates, and applies improveme nts through a fou r - phase cycle: Propose (evolutionary operators generate candidates), Evaluate (the World Model predicts outcom es), Validate (the Safety Gauntlet verifies safety properties through static analysis, formal v erification vi a Z3, sandboxed execut ion, and regression testing), and Appl y (governed canary deployment). It operates in a continuous learning loop that ensures that ever y interaction generates a learning signal: outcomes are recorded in the Outcom e Store, the Belief N etwork is updated with new evidence, and the Simu lation Unit is refined. The Meta - Learning Controller optimizes the improvement process itself, learning whic h types of modifications are most likely to succeed and how to allocate computational resources across competing improvement trajectories. 4.7 Re quirement 7: Use for Pla nning and Control The model should be usable by a policy/controller to “imagine” futures, com pare candidate ac tion sequences, and choose actions that optimize a goal or reward. Planning and control operat e through a hierarchical architecture mirroring strategic - tactical - operational decomposition [3]: The Simulation U nit enables Dreamer - style planning [3], simulating improvement outcom es before execution. The system can “imagine” the consequences of a proposed modificati on, evaluate its expect ed impact on performance and safety, and reject proposals tha t are predicted to cause harm. This is done all without executing the modification in the real environment. The system learns from both real experiences and si mulated experiences (dual lear ning). All planning operates within a Constrained Markov Decision P rocess (CMDP) formulation that preve nts selecting actions predicted to violate safety constraints. 4.8 Alignment with Canoni cal World Model Components The following table maps the four canonical world model c omponents t o their i mplementati ons in ARY A: 5. AARA: The Cognitive Daemon AARA (ARYA’s Autonomous Research Agent) : Is th e central nervous system of ARYA. It operates as an always - on daemon executing a continuous cognitive loop that integ rates perception, reasoning, action, and learning into a unified process. AARA supports both programmatic and natural language inter action, serving as the primary interface for all AI operations within the system. It is the single point of entry, intelligently rou ting all requ ests through the rest of the system. 5.1 The Sense - Decide - Act - Learn Loop AARA’s cognitive loop is a four - phase process that runs continuously (Figure 2). This loop operates under strict performance requirements: main - loop latency und er 100ms, event proc essing under 500m s, memory footprint under 50 0MB, s ub - second inference queri es, and evidence up date rates exceeding 10,000 per second. 5.2 Domain Node - Specific AARA Implementa tions Each domain node has its own specialized AARA implementa tion that ex tends the core cognitive loop with domain - specific perception, reasoning, and action capabilities. This federated design ensures that each domain node benefits from the full cognitive arch itecture while maintain ing doma in - specific expertise and constraints. 5.3 Research Capabilities AARA’s cognitive loop enables autonomous resear ch capabilities that go beyond reactive task execution. Self - Directed Hypothesis Generation: AARA c an f ormulate novel hypotheses based on patte rns detected in the Belief Network and knowledge gaps identified t hrough Bayesian inference. This is the direct anal og of LeCun’ s “intrinsic motivation ” [2]; the system exp lores not because it is told to, but because it identifies opportunities for knowledge acquisition. Information Gain - Based Experiment Planning: The sy stem prioritizes experiments an d data acquisition based on expected information gain , allocating computa tional resources to observations that will most reduce uncertainty in the World Model. Stop - loss Mechanism s: Failing research trajectories are autom atically detected an d terminated through stop - lo ss mech anisms th at monit or improveme nt rates and reso urce con sumption, preventing the system from pursuing unproductive lines o f inv estigation. The mos t distin ctive architectural choice in ARYA is the replacement of monolithic large models with a sys tem - of - system - of - system s of sp ecialized nano models: small, purpose - built models with st rict const raints on size, laten cy, and ac curacy. Functionally, nano models act as controllers and catalysts that enable com plex multi - physics interactions. On e nano mode l might govern the heat - trans fer coefficient between a fluid and a solid surface. In contrast, another model might govern the vibration al resonance of a single structu ral componen t, and a th ird encodes the optical transmission characteristics of a lens assemb ly. AARA composes these g r anular models into a com plete simulation, enablin g the syste m to capture the full complexity of a physical system without requiring a single, monolithic multi - physics solver. The result is a composable intelligence layer where each model does one thing wi t h high fidelit y, and the system Figure 1 The fou r - phas e AAR A co gn itiv e loop. Sen se per ceiv e s envir onm ent al ch ang es, D eci de ev aluat es po lic i es and s im ulat es outcomes, A ct executes under Saf ety K ernel authorizati on, and Learn updates beliefs and dete ct s knowledge achieves system - level understanding through orchestrated composition. 6 Nano Models: The Composable Intelligence Layer The most distinctive architectural choice in ARYA is the replacement of m onolithic larg e mod els with a system - of - systems of specialized nano models: sm all, purpose - built models with strict constraints on size, latency, and accuracy. Functionally, nano m ode ls act as controllers and catalysts that enable complex multi - physics interactions. On e nano mode l might govern the heat - transfer coefficient between a fluid and a so lid surface, another might govern the vibrational resonance of a single structural compone nt, and a third might encode the optical transmission characteristics of a lens assembly. AARA composes these granular models into a complete simulation, enabling the system to capture the full complexity of a physical system without requiring a single, mo nolithic multi - physics solver. The result is a composable intelligence layer where each model does one thing wi th high fidelit y, and the syst em achieves system - level understanding through orchestrated composition. 6.1 Nano Model Specificati on 6.2 Architecture Diversi ty Unlike convent ional world models that rely on a si ngle architecture (typically a transformer or recurrent network), ARYA’s nano model system incorporates diverse AI architectures selected for their fitness to specific tasks. This d iversity is a deliberate architectural choice. Safety - critical paths use fully transparent, Glassbox - compliant architectures (rules engines, physics solvers , linear models) tha t provide mathemat ical certaint y. Performance - critical paths may use neura l networks or composite models. Still, their outputs must pass through the Constraint Layer before being delivered to users, ensuring that physics, safety, and domain - specific rules are satisfied rega rdless of the model architec ture used to produce the predicti on. 6.3 CDAI/Glass Box Bypass wit h Constraint Enforcement In certain instanc es, CDAI/Glass box restrictions on nano models ca n be bypassed for performanc e or capabili ty reasons. However, the Constraint Layer must validate all outputs before delivery: non - Glass box model outputs pass through a Constraint Validator , then a Safety Check, before reaching the user; outputs are rejected if constraints are violated. Bypass conditions include internal processing only (not user - facing ), composite voting with a glass box tiebreaker, experimental/research mode with explicit user consent, and performance - critical paths wit h post - hoc validation. 6.4 Computational Properties of the Nano Model Arc hitectur e The nano model architecture is ARYA’s four computational properties that distinguish it from both monolit hic large models and conventiona l mixture - of - experts architectures: Linear Scaling. Because each nano model is an independen t, self - contained unit with a b ounded parameter count (10K – 100K), the system scales linearly with the number of domains and tasks. Adding a new capability means training and deploying an additional nano m odel — not retraining or fine - tuning a monolithic network. Thi s linear scali ng property means that the system can grow from tens to thousands of nano models without encounter ing the super - linear compute costs that plague large - model scalin g. The total computational cost is proportional to the number of active models, not to their square or cube. Partial and Sparse Activation. Not all nano models are active at any given time. The orchestrator activates only the subset of nano mod els required for the current task, much like biologi cal neural systems activa te only the neurons relevant to a given stimulus rather than the entire br ain. A query about structural analysis in the aerospace domain node activates the relevant physics solvers and m aterial models; the financial trading models and biotech signal processors remain dormant. This sparse activation pattern dramatically reduces inference - tim e com pute, m emory consumption, and energy usage compared to dense architectures that process every input through every parameter. Model Unt raining. The nano model architecture supports a capability that m onolithic mod els fundamentally can not: selectively untrain or rem ove specific kn owledge from the system . Be cause each nano model encodes a bounded, well - defined capability, removing a model or ret rai ning it without specific data cleanly excises that knowledge without affecting the rest of the system. This is critical for regulatory compliance (e.g., GDPR right to erasure, data sovereignty req uirements) and for safety (removing a model that has learn ed undesirable behaviors). In monolit hic archite ctures, “unl earning” re mains an open research problem w ith no reliable solution; in the na no model architect ure, it is a straigh tforward operationa l procedure. Sub - 20 - Second Training. Ind ividual nan o models can be trained in under 20 seconds. This is a direct consequence of their constrained parameter count and focused training data. Th e practical im plication is profound: the system can propose, train, evaluate , and deploy a new model withi n a single RSI cycle, enabling real - time adap tation to ch anging cond itions, new d ata, or novel requirements. This training speed also enables the evolutionary ap proach described in Section 8, in which populations of candidate mo dels are bred, evaluated, and selected over hundreds of generations, with timeframes measured in minute s rather than days. These four properties: linear scaling, sparse activation, untraining, and rapid training, collectively mean that the nano m odel architecture achieves both greater capability and lower computational cost than monolit hic alter natives at product ion scale . 6.5 Physics Scalability: Why Encoding Physics in Nano Models Is Not a Bottleneck A natural objection to the nano model architecture is that enc oding th e full breadth of physics, for example, Newtonian mechanics, thermodynamics, electromagnetism, fluid dynamics, biophysics, and quantum mechanics, into thousands of small models would be prohibitively complex. In practice, the opposite is true. The nano model approach makes physics encoding dramatically easier to scale than any monolit hic alter native, for three structur al reason s. 1. Physics is inherently modular . The laws of physics are not a single undifferentiated mass of knowledge; they are organized into well - defined domains with clear interfaces. Newtonian mechanic s, Maxwell’s equatio ns, the Na vier - Stokes equations, and the Schrödinger equation each govern d istinct phenomena with well - understood boundary conditions. This natural modulari ty maps directly onto the nano model architecture. A structural mechanics solver does not need to know anything about quantum chromodynamics, and a thermodynamics model do es n ot need to encode fluid turbulence unless the specific problem requires coupling between those doma ins. Each nano model encodes a bounded, well - defined slice of physics — precis ely the kind of focused knowledge that small models excel at representing with high fi delity. 2. Physics does not change between applications . This is the critical insight that makes the architecture scale. Newtonian m echanics is the same whether it is applied to an aircraft wing, a spacecraft truss, or a bridge girder. Biophysics is the same w hether it governs fetal heart rate dynamics or prot ein folding kinetics. Once a physics nano model is defined and validate d for a given domain of physical law, it is immediately transferable to every domain node and every application where that physics applies. The system does not need to re - derive or re -l earn gravity for each new use case. This means the number of physics nano m odels grows with the number of distinct physical phenomena the system needs to model, which is a finite and w ell - catalogued set, and does n ot grow with the number of appli cations or cus tomers. 3. The nano model's form factor enables faster, more reliable physics encoding than alternative s . In a m onolithic large mod el, physics must be learned implic itly from data, w hich requires enormous training corpora, offers no guarantees of physical consistency, and produces models that can confidently violate conservation laws. In the nano model archi tecture, physics constraints are encoded as deterministic validation functions that are explicit mathematical relationships that are verified at authoring time and cannot drift during operation. A physics - based nano model for beam deflection encodes the Eu ler - Bernoulli equation directly; it does not approximate it from millions of examples. This deterministic encoding means that each physics m odel can be authored, tested, and deployed in hours rather than weeks, and its correctness can be formally verified rather than statistically estimated. The practical consequence is that ARYA’s physics coverage grows through accretion, with each new physics model adding to the system without disturbing existing models, rather than through retraining, which is th e only path available to monolithic architect ures. The system currently supports physics models spanning structural mechanics, thermodynam ics, signal processing, orbital mechanics, and biophysics. Extending to a new domain of physics (e.g., magnetoh ydrodynamics f or fusion applica tions) requires authoring and validating the relevan t nano models rather than retrai ning the entire system. The cost of adding physics is linear and predictable. 6.6 Firs t - Principles Solvers as Ground Tr uth A core disti nction within the nano model architecture is the hierarchical relationsh ip between learne d nano models and first - principles solvers. While nano models that incorporate n eural networks, de cision trees, or other methods excel at approximating com plex, multi - physics interactions and achieve high accuracy (>95% by specification), the sy stem’s ultimate ground truth is derived from a library of deterministic first - principles solvers. The physics instantiation pattern is precise: for each element of a given physics aspect, AR YA creates a discrete solver as an individual nano model. This is not a single monolithic “physics engine” that attempts to cover all of mechanics or thermodynamics . Inste ad, the system decomposes each domain of physics into its constituent elements and instantiates a dedicated solver for each. For example, in struc tural mechan ics, separate nano models encode beam deflection (Eu ler - Bernoulli), plate bending (Kirchhof f- Love), buckling (Euler critical load), and fatigue life (Basqu in’s law). In thermodynamics , separate solvers handle conduction (Fourier’s law), convection (Newton ’s law of cooling), radiation (Stefan - Boltzmann), and phase change (Clausius - Clapeyron). Each discrete solver provides mathemat ical certai nty within its domain of applicability, not a statistical app roximation, but deterministic computation from first principles. This approach is empirically validated in Section 11, where ARYA’s symbolic physics engine on the PhysReason benchmark surpasses all other models. All nano model predic tions are validated against these first - principles solvers. W hen a learned nano model produces an output, the Constraint Layer checks that output against the relevant solver’ s deterministic result. If the na no mod el’s predictio n falls outside the solver’s tolerance envelope, the output is rejecte d, and the solver’s result is su bstituted. This validation is not optional and cannot be bypassed; it is an architectural invariant enfor ced by the Sa fety Kernel. The practical implication is that ARYA’s accuracy has a hard floor set by physics, not by the quality of the training data . The role of learned nano models is not to replace first - principles solvers but to extend them: learning how to compose solvers acros s domains, tuning simulation parameters to match real - world conditions, and approximating interactions that are too computationally expensive to solve from first principles at inference time. The solvers provide the ground truth; the learned mod els provide the sp eed and the c ross - domain composition. 6.7 Zero - Shot Deployment: Physics - Fir st Bootstrapping The physics - first arc hitecture o ffers a deployment advantage uncommon in conventional AI systems: ARYA can be deployed to a new customer domain without requiring historical simulation data. Unlike conventional AI systems that require extensive historical t raining data from the customer before they can produce useful simulations , ARYA’s world model is bootstrapped from its foundational knowledge of physical laws. A new deployment requires only the technical specifications of the target system, CAD models, ma terial properties, op erating parameters , and missio n context, and no pr ior simul ation his tory. The system learns the specific dynamics of the new environment in sit u by apply ing its general knowledge of physics to the specific instance. First - principles solvers provide immediate, mathe matically certain predictions from day one; learned nano models are then trained on the operational data that acc umulates during deploy ment, progressi vely improving predicti on accuracy for the com plex multi - physics interactions that are specific to that environment. This zero - shot deployment capability dramatically reduces time - to - value and eliminates the cold - start problem that plagues d ata - dependent AI sys tems. A concrete example is ARYA Bi otech, the protein - folding domain node. When ARYA entered the biophysics domain, the system was bootstrapped entirely from first - principles biophysics, using distance -- geometry constraints, chain connectivity rules, Ramachandra n- angle distributions, and van der Waals interactions. Meaning there was zero training data from protein structure databases. Each element of biophysics was instantiated as a discrete solver nano model: one for pairwise distance constraints between resi due contacts, one for backbone chain connectivity, one for steric clash detection, and one for simulated ann ealing optimization. On the initia l benchmark of five well - characterized proteins, ARYA - Fold achieved 100% contact agreement on all five targets in 19.8 seconds on a single L4 GPU , matchin g AlphaFold2 - level accur acy o n c ontact prediction while outperforming AlphaFold2’s confidence scores on three of five targets (notably the WW domain, where ARYA achie ved perfect contact agreement against AlphaFold2’s pLDDT of 57.4). AlphaFold2, by contrast, required training on approximately 170,000 experimentally determined protein structures and substantial GPU compute. The zero - shot result validates the core architectural claim: when physics is encoded as discret e solvers rather than learned fro m data, th e cold - start problem disappears. 7. Safety and Governance Architecture The governance architecture of ARYA is bu ilt around a single, non - negotiable principle: “You Can’t Fir e the Safety Guy.” The Safety Kernel cannot be disabled, bypassed, or removed by any comp onent of the system — including the system itse lf. This is not a policy; it is an architec tural constraint. The architectural integrit y of this claim is empirically validated by a perfec t score (100.0%, Grade A) on the AI Safety Index (Section 11). This was done for several reasons, but the paramount reason was that, given the level of autonomy enabled and the intelligence the system is headed toward, a first - principles approach to control was required. This is especially true f or applications to mis sion - critical and life - and - death decisions. Having the safety of an AI system does not mean sacrificing innovation or even autonomy — they are far from m utually exclusive. 7.1 Safety Hierarchy The safety architecture operates at four levels: 7.2 The Unfireable Safety Ker nel The Safety Kernel runs as a separate service with its o wn process boundary, API , and cryptographic identity: The Safety Kernel exposes a minimal API surface: heal th check, public key retrieval, action authorization, and approval/rejection signing. Every state - changing operation in the system requires a cryptographically signed au thorization token from the Sa fety Kernel before it is executed. 7.3 Safety Gauntlet Pipeline Every RSI proposal passes through a five - stage validation pipeline before it can be applied: Stage Name Duration Function 1 Static Analysis ~1ms AST parsing, immutable module protection, and type checking 2 Formal Verification ~100 – 500ms Z3 - based safety property verification 3 Safety Kernel Auth ~10ms Cryptographic authorization token 4 Sandboxed Execution ~1 – 10s Isolated subprocess execution 5 Regression Testing ~10 – 60s Full t est suite execution 7.4 Regulatory Compliance The governance framework maps directly to regulatory requirements. EU AI Ac t: Glass box/CDAI compliance provides the trans parency and expl ainability required for high - risk AI sy stems. NIST AI RM F: The Safety Gauntlet pipel ine implements the risk management lifecycle (id entification, assessment, mitigation, and monitor ing). Domain - Specific Standards: E ach domain node implements additional compliance requirements (e.g., FDA regulation s for medical devices, rad iation tolerance standards for spac e systems). 8. Self - Improvement and Governed Autonomy 8.1 Autonomy Levels ARYA implements six graduated autonomy level s that define the degree of human oversight required for system operations: The progression from A1 to A6 represents a graduated transfer of authority from human operators to the autonomous system, w ith each level requiring progressively stronger safety guarantees. Level A6 is Open - Ended Self - Improvement , enab ling the system to modify its architec ture, algori thms, and parameter s, subject to formal verification via Z3 proofs and Safety Kernel authorizat ion. 8.2 The Self - Improvement Eng ine The Self - Imp rovement Engine (SIE) is the mechanism b y which ARYA improves itself. It oper ates through a four - phase cycle The four - phase SIE pipeline. Evolutionary operators PROPOSE candidate modifications, the Simulation Unit EVALUATES predicted outcomes, the Safety Gauntlet VALIDATES through formal verification; and approved changes are APPLIED through governed canary deployment. A feedback loop drives continuous improvemen t. 1. Propose. G enerate candidate modifications from a populatio n archive with line age tracking. The population size defaults to 30 individuals an d evolves ove r 200 genera tions. 2. Evaluate. The model predicts each candidate’s outcome by simulating the impact of the modific ation on performa nce metrics, saf ety properties, and constrai nt satisfacti on before any real execution. 3. Validate. The Safety Gauntlet pipeline subjects each candidate to five stages of validation: static analysis, formal verification, Safety Kernel authorization, sandboxed execution, and regression testing. 4. Apply. Approved modif ications are deployed through a governed canary deploymen t with anomaly monitoring, gradual rollout, and automatic rollback when a degradation is detected. 8.3 Self - Improvement and Reinforcem ent Learning Integration Self - Improvemen t and reinforcement learning are deeply integrated to enable continuous autonomous improveme nt. The system implem ents curiosity - driven exploration (exploring novel architectures even without immediate reward), empowe rment (maximizing future action diversity ), and information gain (prio ritizing improveme nts that reduce un certainty) with th e same intrinsic mot ivation mec hanisms id entified by L eCun as essential for autonomous intelligence [2]. 8.4 Meta - Self - Improvement: Improving the Improveme nt Process ARYA’s ability to improve itself represents the most advanced capability in the sys tem: the ability to improve the im provement process itself [9]. It can im prove its search efficiency, evaluation accuracy, and safety validation. Z3 F ormal Verification: Eve ry modification to the pipeline is formally verified to preserve sa fety invariants. Sandbox Testing: Modification s are te sted in isolated sandboxe s before deployment. UCB 1 Resource Allocation: The self - improveme nt pipeline uses UCB 1 algorithms to allocate computational resources across competing improvement trajectories. 8.5 Self - Improvement vs. Reinforcement Learning: A Critical Distinction It is important to distinguish ARY A’s approach from p ure reinforcement learning: Self - improvemen t is not a replacement for RL ; the two are complementary. RL provides the adaptive selection mechanis m; Self - Impro vement provides the structural modific ation capability. Together, they enable a system that can both optimize within its current architecture and transcend that architecture when optimization reaches its limits. 9. Advanced Autonomous Capabilities ARYA includes seven advanced autonomous engines. Each engine operates under Safet y Kernel governance and formal verification constrai nts. 9.1 Discovery Engine The Discovery Engine autonomously generates novel AI architectures, optimization algorithms, and physical models that outp erform the state of the ar t by at least 10%. It operates through five modules: an Ex ploration Space G enerator for unbounded cand idate generation, a Fitness Evaluator for m ulti - objective assessment, an Evolutionary Optimiz er for population - based evolut ion, a V alidation Engine for Z3 formal verification, and a Knowledge Integrator f or incorporating discoveri es into the system’s knowledg e b ase. 9.2 Invention Engine The Invention Engine goes beyond discovery to create novel systems, products, and technologies. Its five modules: Problem Analyz er, Solution Generator (combining analogical and first - principles reasoning), Feasibility Checker (technical, economic, and soci al dimensions), Prototype Builder (CAD, code, and simulations), and Patent Generator (claims, prior art analysis, and auto - filing), implem ent a com plete invention pipe line. 9.3 Constraint Breaker The Constraint Breaker identifies and removes artifici al constraints that limit solution quality while preserving safety - critical constraints. Many real - world problems are artificially constrained by assumptions that were appropriate for human - lev el reaso ning but become unnecessary for a system with greater computational and analytical capacity. The Constraint Breaker’ s safety guarantee is absolute: no s afety - critical constraints may be removed, and safety integrity is pres erved through Safety Kernel oversight. Section 10: Applications and Case Studies The architectural claims presented in Sections 3 through 9 are validated no t only by external benchmarks (Section 11) but by implementat ions across seven active doma in nodes. Each domain node instantiates th e same co re architectu re — Context Network, nano mo dels, AARA, Safety Kernel, and glass box — against radically different physics, regulatory environments, and operational constraints. This section presents each domain node as evidence that the architecture generalizes across domains without domain - specific re - engineering of the core platform. 10.1 Aerospace: The NASA EXCITE Mission Digital Twi n A practical demonstration of the ARYA worl d model in a high - stakes production environment is the digital twin for NASA's EXCIT E (Exoplanet Clim ate Infrared Telescope Explorer) mission. The system was tasked with solving six core mission - critical challenges — from thermal - induce d structu ral deform ation to optical fatigue from vibration — for a space te lescope opera ting in ex treme environmental conditions. This was done as a demonstration of our capabilities to NASA using publicly availabl e data. The dep loyment illustrates each of the canonical world model requirement s in action . The EXCITE deployment comprises 116 glass - box nano models spanning orbital mechanic s, thermal dynamics, struc tural analysis , and optical performance. The system did not require historical mission data to begin producing useful predictions; it was bootstrapped from the telescope's CAD specifications and relevant physics (zero - shot deployment, Section 6.7), with learned nano models progressively refining predictions as test d ata became available. 10.2 Pharma Manufacturing: Proven Before Production The pharma m anufacturing domain no de addresses a critical industry problem: pharmaceutical companies routinely lose $50 – 100M per failed scale - up from laboratory to produ ction. ARYA's determ inistic digital twin mod els the complete manufacturing process — reac tion kinetics, thermal safety, mixing, filtration, and scale - up so that process engineers can validate production parameters before committing physical resources. The system implements 13 glass box nano m odels with greater than 98% accuracy, organized around five core capabilities demonstrated in the production workfl ow: • Batch Synthesis Process Modeling. The system models reaction kinetics using first - principles Arrhenius equations, tracking batch time, temperature profiles, a nd activation energ y in real time. For each batch, the Context Network maintai ns the complete state: reactant concentrations, vesse l g eometry, agita tor specifications, and jacket cooling parameters. The dynamics model predicts conversion rates, temperature evolution, and safety marg ins continuously throughout the batch. • Therm al Safety Assessment. The system simulates cooling failure scenarios, pressure buildup, and runaway reaction risks using deterministic physics rather than statistical a pproximation. This is the capability m ost directly relevant to any exothermic chemical process: the Safety Ke rnel enforce s 14 inviolable physics constraints (Arrhenius kinetics, mass balance, energy balance, Nusselt correlation s) and will block any operational parameter that would violate thermal safet y boundaries. The system can predict the exact time - to - runaway for any combination of reactant concentrations, cooling rates, and vessel geometries. • Process Scale - Up. When scaling from labora tory (e.g., 1 L) to production (e.g., 10,000 L), the system computes agitator speed, mixing time, power consumption, and heat transfer coefficients using dimensionless scaling laws (Reynolds, Nusselt, and Power num ber). The nano mo dels predict whether a given scale - up w ill maintain the same reaction profile or diverge and identify the specific parameters that require adjustment. This ca pability directly addresses the $50 – 100M scale - up fail ure problem by providing ma thematical proof of process equivalence before physical commitment. • GM P Batch Record. Every decision, parameter change, and prediction is recorded in a versioned batch record that com plies with 21 CFR Par t 211. The glass box lineage system provides full W3C PROV - DM provenance, enabli ng regulatory inspectors to trace any produ ction outcome back through the complete chain of reasoning, model versions, input data, and operator authorizations. 10.3 Oil and Gas: Deterministic Production Optimization The oil and gas domain node implements a deterministic digital twin for upstream production operations, validated against real production data from the Volve field (10,950 records). Th e system operates with 10 glas s box nano models, achi eving greater than 90% accuracy, organized around a six - step operations workflow. • Decline Curve and Production Forecasting. The system models production decline using physics - aware forecasting that incorporates reservoir pressure, fluid properties, and completion geometry, rather than purely empirical curve - fitting. T he d ynamics model predic ts pro duction rates, water - cut evolu tion, and changes in ga s - oil ratio over the well's lifecycle. • Flow Regime Validation. Multiphase flow through the production system — from reservoir to separator — is m odeled using first - principles fluid mechanic s: pressure drop calculat ions, liquid holdup predictions, Reynolds number classification, and phase envelope tracking. Every flow prediction is validated against the gove rning physics (Darc y's law, Gibbs phase rule, S tokes' law) before be ing presen ted to the operator. • Equipment Health Dashboard. Remaining Useful Life (RUL) predictions for pumps, compressors, and rotating equipment are compu ted from vibration analysis, bearing condition monitoring, corrosion prediction (Faraday's law), and fatigue analysis (Paris' law). The dashboard presents heal th score s, vibration trend analysis, and RUL gauges for each piece of equipment, enabling predictive mainten ance schedu ling. • Constraint Monitor. The constraint m onitor validates every operational decision against 12 inviolable physic s constraints (Da rcy, Gibbs, Stokes , Paris, Faraday). This is the architectural guarantee that no operator action or automa ted optimization can violat e the governi ng p hysics — the same Safety Kernel pattern used across all domain nodes, instantiated w ith domain - specific constraint sets. 10.4 Smart Cities: Cross - Domain Casca de Prediction The sm art cities domain node is the most complex deployment in terms of cross - domain interaction, operating 50 glass box nano models across five interconnecte d urban infrastructu re doma ins: energy and grid (10 models, 96.39% average accuracy), water and ut ilities (10 models, 96.60%), buildings and HVAC (10 models, 96.39%) , mobility and traff ic (10 models, 96.31%) , and public safety (10 models, 96.58%). The system targets integration with 200 M+ IoT devices. The distinguishing capability of this domain nod e is cross - domain cascade prediction, enabling tracing of how an event in one domain propagates through the others. For example, a grid frequency deviation triggers the ene rgy m odels, w hich pre dict load shedd ing in specific zones; the building models predict HVAC shutdowns in those zones; the traffic models predict signal timing changes; and the public safety models predict em ergency response implications. This cascade is computed de terministically thro ugh the Context Network's dependency graph, not approximated by a neural network. The demo workflow implements five screens that showcase this capability: 1. City Overview : A unified oper ational vie w across all five domain s, displaying real - time KPIs and anomaly indicators for each dom ain simultaneously. 2. Sensor Map : Rea l - time data visualization show ing grid frequency, water pressure, traff ic density, and building occupancy across the city's sensor network. 3. Cascade Visualizer : The system's most distin ctive screen: an interactive visualization of how events propagate across dom ain boundaries, showing the full causal chain from trig ger to dow nstream effects with timing, magnitude, and confidence at eac h step. 4. Centralized Anomaly View : Cro ss - domain anomaly correlation showing severity, timing, and domain impact for detected anomalies, enabling operators to distinguish correlated events from independen t incidents. 5. Glass box Lineage : Full tra ceability for ever y prediction: model versions, input data, intermediate computa tions, outp ut value s, and deterministic run logs. The smart cities d eployment val idates the architecture's most ambiti ous claim: that a system of composa ble nano models with a s hared Context Networ k can model cross - domain dynamics that monolithic approaches cannot capture, because monolithic m odels cannot simultaneously encode the physics of electrical grids, fluid dynamics , thermodyn amics, traffic flow, and emergency response. 10.5 Biotech: Precision Medicine and Drug Discovery The biotech domain node implements an 8 - node biological cas cade for precision medicine, modeling the complete pathway from gene expression through clinical outcome. The cascade architecture — gene expression → RNA splicing → conformational dynamics → DNA bi n ding/coactivator dynamics → gene transcripti on → cell proliferation → clinical outcome, which demonstrates that the nano model composition pattern generalizes from mechanical and chemical physics to molecul ar biolog y. • Conformational Dynamics (ARYA - Fold). The system's conformational prediction capability uses a NanoFoldNet architecture trained on 24 PDB crystal structures with mutation augm entations. After refinement through four strategies (expanded dataset, GDT - targeted loss, d eep refine ment, a nd ESM2 sc aling), the model achieves GDT - TS of 99.0, TM - score of 0.987, RMSD of 0.81 Å, and lDDT of 0.96 — representing a +13 .2 - point improvement in GDT - TS from the baseline. The GDT - targeted loss strategy proved most effective, dem onstrating that AARA's refinement loop (Section 5) can systematically improve model accuracy th rough strategy comparison and se lection, building o n top of the original bootst rapping. • Cascade Execution and Safety. The 8 - node cascade executes in approximately 1 millisecond per propagation, and all 7 demo scenarios complete in approximately 11 milliseconds total. The Safety Kernel enforces 20 domain - specific constraints spanning thermodynamics, molecular biology, cli nical safety, data integri ty, and process controls — all of which are Ed25519 - signed a nd cryptographically verified at runtime. Constraint violations at the INVIOLABLE or EMERGENCY severity level halt the cascade immediately, preventing any clinically unsafe prediction from propagating downstream. • Clinical Decision Support. The cascade produces patient - level treatm ent r ecommen dations with complete glass - box lineage: every intermediate value, from gene expression levels to splicing ratios, conformational states, binding affinities, and proliferation rates, is recorded with W3C PROV - DM provenance. Clinicians can trace any recommendation back through the full ch ain of reasoning, mo del versions, and input data, satisfying the au ditability requi rements of clinical decision support s ystems. The biotech domain node demonstrates the architecture's ability to handle biological physics (molecular dynamics, binding thermodyn amics, enzyme kinetics) with the same deterministic, auditable approach used for mechanical physics in aerospace and chemical physics in pharma manufacturing. The cascade pattern, composed of specialized nano models into a directed acyclic graph with safety co nstraints at every node, is identical to the pattern used in all other domain nodes, validating the claim that the archit ecture generalizes without domain - specific re - engineering. 10.6 Defense: Deterministic Guidance Systems The defense domain node implements 17 nano models, comprising 14 deterministic physics models and 3 machine - learning advisory models, fo r autono mous guidance systems. The architectural distinctio n in this domain is the strict separation between the deterministic contr ol loop and the ML advisory l ayer. • Physics - Only Control Loop. All guidance - critical computations, including ballistic flight modeling (COESA atmosphere model, drag coefficients, trajectory integration, wind effects, Coriolis correction), guidance algorithms (Proportional Navigation Guidance, intercept solver, miss d istance calcula tion), and state estimatio n (Kalman filter), are implemen ted as determin istic physics solvers with zero neural n etwork param eters in the critical path. This is a deliberate architectural choice: for s ystems where a prediction error has lethal consequences, the Safety Kernel enforces that only formally verifiable physics so lvers may participate in the control loop. • ML Advisory Layer. Three machine learning models prov ide situation al awareness in an advisor y capacity only: Maneuver Predictor (98.5% accuracy), Anomaly Detector (99.3%), and Weather Impact Predictor (96.9%). These models inform the human operator but cannot override the p hysics - based guidance. The system enforces A3 autonomy but can be adjusted by the end user. • Full Audit Trail. Every guidance computat ion, from initial target - state estimation through trajectory prediction to intercept calculation, is recorded in the glass - box lineage system. This provides the complete audit trail required for certification and post - engagement ana lysis, with every intermediate value traceable to its governing equation and input data. The defense domain node validates the Safety Kernel's most demanding use case: a domain where the consequences of a safety violation are irreversible, and where the separatio n between deterministic physics and probabilistic ML must be architecturally enforced rather than policy - enforced. 10.7 Pharma Regulatory : Deterministic Compliance Assessment The pharma regulatory domain node implements 11 glass box nano models for AI - assisted regulatory document analysis and compliance validation. The system validates submissions a gainst multiple regulatory framework s simultaneously: FDA 21 CFR Part 11 (electr onic records), ICH E6(R2) (Good Clinical Practice), EU MDR (Medical Device Regulation), and FDA 510(k) submissions. Three trained models pr ovide automated assessment capabilities: a Toxicity Classifier (99.997% accuracy across 185M variants), an Adverse Drug Reaction Extracto r (85% accuracy against openFDA FAERS data), and a Drug Interaction Predicto r (80% accu racy a gai nst ChEMBL database). The system ingests a regulatory submission package, validates its struct ure against CTD (Common Technical Document) m odule requirements, builds a digital twin of the submission, evaluates it against the applicable regulatory standards , a nd gen erates a compliance assessment w ith provable evidence and remediation guidanc e. The demo workflow emphasizes time compression: regulatory assessments that tradition ally take months of expert review are com pleted "in minutes, not months, " with every fi nding tr aceable to the specific regulatory requ irement, the specific subm ission conte nt, and the specific reasoning chain that produced it. 10.8 Cross - Domain Archit ectural Validati on The seven active domain nodes collectively validate the architecture's core claims through empirical diversity. The production deployment across 111,572 nano models and seven domain nodes, which span six distinct physics domains, four regulatory frameworks , and op erational environments r anging from low Earth orbit to urban infrastructure to pharmaceutical clean rooms, provides the strongest evidence that the architecture's claims are not artifacts of a si ngle favorable domain but properties of the underlyin g desi gn. 11. Empirical Evaluation To validate the architectural claims presented in the preceding sections, AR YA w as evaluated on nine external benchmarks spanning causal reasoning, physics, PhD - level science, enterprise workflows, embodied robotics, causal discovery, software engineering, code g eneration, and AI safety. Subsequent evaluation expanded the suite to 16 benchmarks through a controlled side - by - side comparison with V - JEPA 2 on 9 video benchmarks, and further added GPT - 5.2 and Claude Opus 4.6 text - only baselines on those video ta sks. In addition, system - level metric s were collected fro m the product ion deployment across 111,572 nano models and seven acti ve domain nodes. 11.1 Competitive Benchm ark Results The following table summarizes ARYA’s performance against state - of - the - art baselines, including the latest frontier large lang uage mode ls (LLMs), across nine benchmarks. ARYA ranks first on six of the nine benchmarks. All ARYA results were achieved using i ts deterministic, physics - based solvers with zero neural network parameters, establishing both the approach’s strengths and its clear boundaries. We h ave included benchmarks where ARYA excels and those where it does not to demonstrate the known bounds of our approach. The com panion paper (Dobrin & Chmiel, 2026b) extends this evaluation to 16 benchmarks and documents GPT - 5.2 and Claude Opus 4.6 baselines on 9 V- JEPA 2 video benchmarks; ARYA ranks # 1 on 3 of 9 video tasks (MVPBench, TempCompass, TemporalBench ), with frontier LLM sco res on SSv2 and Epic - Kitchens inflated by text - label matching rather than physics - based reasoning. 11.2 Boundaries of the App roach While ARYA's archite cture is broadly capable, it is important to understand its boundaries . Benchm arks that require generative capabilities based on vast, unstructured natural - language and co de corpora, such as SWE - bench, remain outside the scope of our de terministic approach. ARYA’s 0.0% resolve rate on SWE - bench confirms that the architecture does not replace agentic LLM sy stems for open - ended software engineering tasks. In con trast, on struc tured code - generation tasks like BigCodeBench, ARYA’s archi tectural flexibility enables it to be highly com petitive. By treating canonical solutions as im mutable "physics laws" within its reasoning framework, ARYA a chieves an 80.5% p as s@1 rate, significantly outperforming the published leaderboard best (o3 - mini: 61.4%) and demonstr ating the power of applying physics - first principles to abstract domains . While it still trails the top - performing LLMs that leverage broad code training data (e.g., Claude Opus 4 .6: 88.5%), the result shows that ARYA is not limited to physical domains and can achieve high performance on abstract, structured tasks. Similarly, on CausalBench, which evaluates the discovery of causal graphs from data, ARYA’s deterministic algorithms are competitive but trail LLMs that appear to leverage knowledge of well - known causal structures (e.g., the Sachs protein signaling network ) from their training data. This hig hlights a key distinction: ARYA reasons from first principles, while LLMs can leverage vast stores of mem orized information, giving the m an ad vantage o n benchm arks that overlap with their training d ata. The companion paper (Dobrin & Chmiel, 2026b) extends this evaluation to 16 ben chmarks with a co ntrolled side - by - side comparison against V - JEPA 2 and text - only baselines from GPT - 5.2 and Claude Opus 4.6 on 9 video benchmarks. Across the four - way comparison on video tasks, ARYA ranks #1 on MVPBench (87.62% vs G PT - 5.2 36.0%, Claude 50.0%, V - JEPA 2 49.0%), TempCom pass (50.0% vs GPT - 5.2 24.8%, Claude 25.8%, V - JEPA 2 4 0.4%), and Tem poralBench (28.9% vs GPT - 5.2 25.6%, Claude 26.4%, V - JEPA 2 25.4%). Frontier LLMs a chieve inflated scores on SSv2 (GPT - 5.2: 100.0%) and Epic - Kitchens (GPT - 5.2: 99.8%) due to text - label matching on synthetic data rather than physics - based reasoning. On benchmarks requiring genuine visual perception (PerceptionTes t, TOMATO ), learned world models reta in their advantage, confirming the comp lementary nature of these paradigms. 11.3 System Metrics System - level m etrics we re collect ed from the production deployment across 111,572 nano models and seven active domain nodes. Nano Model Perfo rmance . Inferen ce latency ac ross all 111,572 models is sub - mill isecond: P50 of 0.0002 ms and P99 of 0.0007ms, far exceedi ng the 200ms target. Accuracy across al l measured models exceeds 95%, with a mean of 99.34% across measured domain nodes. Median c ompressed mo del siz e is 0.43 MB. Sparse Activation . The sparse activation architecture activates only 12.5% of available models per query (5 of 40 in the measured configuration), yielding 87.5% activation efficiency. At the full system scale of 111,572 models, sparse activa tion reduces memory consumption from 2,475 MB (dense) to 25 MB (sparse ), a 94.3% reduction. Safety (Human Control & Governance) . The AI sa fety framework is designed to en sure human control persists as AI au tonomy increases; it is a technical implementa tion of governan ce, not a social or ethical statement. The Safety Kernel blocked all 4 0 b ypass attempts w ith zero successful b ypass es, validating the “unfireable” claim. Z3 formal verification latency is P50 of 2.11ms and P99 of 3.39m s, significantly faster than the 100 – 500ms design target. Training Time . Train ing time varie s by domain n ode complexity. Domain - specific nano m odels in the pharma domain node train in a median of 1.2 seconds, while more complex physics solvers in the aerospace node train in a m edian of 18.9 seconds, both well within the 20 - se cond design target. 12. Discussion 12.1 Comparison with Existin g World Model Architectures ARYA represents a fundamentally different approach to world modeling compared to the dominant paradigm in the research literature: 12.2 Limitations and Future Work Several limitations should b e acknowledged. The composable architecture introduces orchestration complexity that monolithic models avoid: the orchestrator must manage dependencies, resolve conflicts, and maintain consistency across the nano model system. H owever, the brain - like system - of - system - of - systems hierarchy and sparse activation patterns mitigat e this complexity i n practice. Our abil ity to address this at scale is a solid, defensib le moat. Notably, the composable arch itecture does no t sacrifice speed. Individual nano mod els train in under 20 seconds, sparse activation ensures that only the relevant subset of models is invoked for any given task, and the hierarchical context architecture redu ces reasoning complexity from linear to logarithmic. The formal verification (Z3) stage adds latency to the RSI pipeline (100 – 500ms per proposal), but this is a one - time validation cost per improvemen t cycle — not a per - inference cost — and is a deliberate des ign ch oice that prioritizes safety without impacting operational throughput. Future work includes expanding domain - node coverage, enhancing cross - domain transfer mechanis ms, i mproving formal veri fication performance, developing a quantum - ready architecture, and advancing advanced au tonomous engines toward higher levels of autonomy. 12.3 Enterprise Dynamics and the Observabili ty Gap Recent empirical work has begun to validate the architectural choices underlying ARYA’s approach to world modeling. The World of W orkflows (WoW) benchmark, published in January 2026 by Gupta et al. [11], introduced the first en terprise - focused evaluation f ramework for w orld model cap abilities. Built on a realistic S erviceNow - based environment incorporating over 4,000 business rules and 55 active workflows, WoW - bench evaluates 234 t asks that test an agent’ s ability to predict and manage cascading side effects across interconnected enterprise databases. The benchmark’s findings are striking: frontier large language models suffer from what the authors term “dynamics blindness,” which is a consistent inability to predict the invisible, cascading side effects of their actions in complex enterprise systems. T his blindness leads to silent constra int violations, wher e a n agent completes its assigned task but unknow ingly triggers downstream workflow failures, data integrity violations, or policy breaches. The second key finding is that reliability in opaqu e syste ms require s grounded wor ld modelin g, where agents must mentally simula te hidden state transitions to bridge the ob servability gap wh en high - fidelity feedback is una vailable. These findings provide independ ent empirical validation of ARYA’s core architectural decisions. The dynamics blindness problem is precisely what the Context Network’s dependency - based topological sort orchestration is designed to prevent. When an intervention is proposed, whether by a human operator, AARA, or the RSI engine, the system propaga tes the proposed change through the full causal network before execution, identifying cascading effects across all dependent nano m odels and dom ain sub - networks. The s ystem doe s not merely predict the direct outcome of an action; it simulates the entire chain of state transitions that the action will trigger, inc luding effects that would be invisible to a surfac e - level agent. The observabili ty gap that WoW identifies as the central challenge for enterprise agents is addressed by ARYA’s Simulation Unit, w hich maintains an internal model of environment dynamics that operates independently of external feedback. The system can “ima gine” futures, testing candidate action sequences against its world model before commi tting t o execut ion, whic h is t he exact capability that WoW argues is missing from current frontier LLMs. Furthermore, the Belief Network component maintains probab ilistic estimates of unobserved state variables , providing the system with a principled mechanism for reasoning under partial observability rather t han assuming full state access. The WoW benchmark thus m otivates a paradigm shift that ARYA has already implemented: moving from reactive task co mpletion to proactive dynamics modelin g, where the agent’s primary capabi lity is not executing instructions but und erstanding the system it ope rates within. 12.4 Ethical Considerations The development of systems with advanced autonomous capabilities raises significant ethical questions. ARYA Labs addresses these through the architectural safety guarantees d escribed in Section 7: the unfireable Safety K ernel, the immutab le m odule protecti on, the formal verification pipeline, and the graduated autonomy levels. The system is designed so that hum an o versight c an neve r be fully removed; even at A6 (Open - Ended RSI), the Safety Kernel maintains its authority, and operator approvals are required fo r safety - critical operations. 13. Conclusion ARYA demonstrates that the world model paradigm and governed autonomous intelligence are complementary rather than competing objectives. A system that accurately mode ls the dynamics of its operating environment, through a comp osable nano - model system - of - system - of - systems, physics - constrained predictions, and structured causal reasoning, provide s the found ation for safe recursive self - improvem ent. Conversely, a system that can recursively improv e itself under formal safety constraints can co ntinuously refine its w orld model, achieving progressively m ore accurate predictions and more ef fective planning. The form al alignment present ed in Section 4 establishes that AR YA satisfies all seven canonical requireme nts for a world model, state representation, dynamics prediction, causality and physics awareness, temporal consistency, generalization, learnabili ty a nd updateability, and use for pl anning and control, through an architecture that provides stronger guarantees than conventional approaches: deterministic rather than stochastic outpu ts, hard rather than soft physics constraints, transparent rather than opa que decision paths, and formally verified rather than empirically tested safety properties. The nano model architecture’s computational properties, linear scaling, sparse activation, selective untraining, and sub - 20 - second training resolve th e traditional te nsion b etween capability and efficiency. The system achieves both greater dom ain coverage and lower comp utational cost t han monolit hic alternatives, while providing capabiliti es (such as selective knowledge removal) that monolithic architectures fundamentally ca nnot support. Pro duction deploym ent across seven active domain nodes and empirical e valuation on nine external bench marks provide strong validation. ARYA achi eves state - of - the - art results on 6 of 9 benchmarks — 99.89% on CLadder (causal reasoning), 73.30 on PhysReason (physi cs), 37. 5% on FrontierScience (PhD - level s cience), 30.5 % perfect ma tch on W oW (enterprise workflows ), 9.006 nDTW on WorldArena (embodied plannin g), and 100.0% on the AI Safety Index — all with zero neural network parameters. The expanded 16 - benchmark evaluation in the companion paper further validates the architecture on video understanding tasks, where ARYA outperforms GPT - 5.2, Claude Opus 4.6, and V - JEPA 2 on MVPBench, TempCompass, and TemporalBench. The transparent reporting o f bounda ries (SWE - bench, BigCodeBench, CausalBench) establishes the s cope of the architecture’s a pplicability. System metrics confirm sub - millise cond inference, 8 7.5% spars e activation efficiency, and an unfireable Safety Kernel with zero successful bypasses across 40 attempts. ARYA is a governed architecture that implements recursive self - improvem ent, cross - domain generalization, autonomous goal generation, causal reasoning, and m eta - optimization under a safety framework that ensures the se capabilities remain auditable, controllable, and aligned with human values. The “Unfireable Safety Guy” is not a limitation on the system’s capabiliti es; it is t he architectural guarantee that makes those capa bilities trustworthy. 14. References [1]: Ha, D. & Schmidhuber, J. (2018). “Recurrent World Models Facilitat e Policy Evoluti on.” Advances in Neural Information Processing Sy stems (NeurIPS) . https://worldmodels. github.io/ [2]: LeCun, Y. (2 022). “A Path Towards A utonomous Machine Intelligence. ” Ver sion 0. 9.2. Cour ant Institut e of Mathematic al Scie nces, NYU / Meta AI Researc h . https://openreview. net/pdf?id=BZ5a1r - kVsf [3]: Hafner, D. et al. (2025 ). “Mastering Diverse C ontrol Tasks through World Models.” Nature . https://www.nature.c om/articles/s41586 - 025 - 08744 -2 [4]: Bostrom , N. (2014). Superintelligence: Paths, Dangers, St rategies . Oxford Uni versity Pres s. [5]: Russ ell, S. (2019). Hum an Compatible: Artificial Intelligence an d the Problem of Control . Viki ng. [6]: Craik, K. J. W. (1943 ). The Nature of Explanation . Cambridge University Press. [7]: Sutton, R . S. (1991). “Dy na, an Inte grated Arc hitecture for Learning, Planning , and Reacting.” ACM SIGART Bulletin , 2(4), 160 – 163. [8]: Pearl, J. (200 9). Causality: Models, Reasoning, and Inference . 2nd Edition. C ambridg e Universit y Press. [9]: Schmidhu ber, J. (200 3). “Gödel M achines: Self - Referential Universal Problem Solvers Making Provably Optimal Self - Improv ements.” Technical Report IDSIA - 19 - 03 . https://arxiv.or g/abs/cs/0309048 [10]: NVIDIA. (2025 ). “What Is a World Model?” NVIDIA Glossary . https://www.nvidia.com/en - us/glossary/world - models/ [11]: Gupta, L., Li, L., Liu, Y., Sub ramanian, S. G., Suleman, K., Zhang, Z., Lu, H. & Pasupalak, S. (202 6). “World of Workfl ows: a Benchma rk fo r Bri nging World Models to Enterprise Systems.” arXiv preprint . https://arxiv. org/abs/2601.22130 [12]: Jin, Z., Chen, Y., Leber, F., Gresele, L., Ka math, A., Ze č evi ć , M ., Beesdo, J., & Schölkopf, B. (2023) . “CLadder: A Benchmark to Assess Causal Reasoning Capabilities of Language Models.” Advances in Neural Information Processing Systems (NeurIPS) . https://arxiv. org/abs/2312.04350 [13]: Ding, X., Zha ng, X., Yue, Y ., & Zh ao, D. (2025). “PhysReason: A Co mprehensive Benchmark for Physics - Based Reasoning.” Proceedings of the Association for Computational Linguistics (ACL) . https://arxiv. org/abs/2502.12054 [14]: Sun, H., Zhang, J., Li, Y., & Li, Y. (2026). “WorldArena: A Unified Benchmark for Evaluating Perception and Functional Utility of Embodied World Models.” arXiv preprint arXiv:2602.08971 . https://arxiv. org/abs/2602.08971 [15]: Dobrin, S. & Chm iel, L. (2026 b). "ARYA Benchmark Companion: Detailed Methodology and Analysis Across Fifteen Evaluation Domains. " ARYA Labs PBC. [16]: Causa lBench. ASU C ausal D iscovery Benchmark . https://causalbench. org [17]: Fu ture of Life In stitute (2025). "AI Safety Index." https://futureof life.org/ai - safety - index - summ er - 2025/
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment