Operational tracking loss in nonautonomous second-order oscillator networks
We study when a network of coupled oscillators with inertia ceases to follow a time-dependent driving protocol coherently, using a simplified graph-based model motivated by inverter-dominated energy systems. We show that this loss of tracking is diag…
Authors: Veronica Sanz
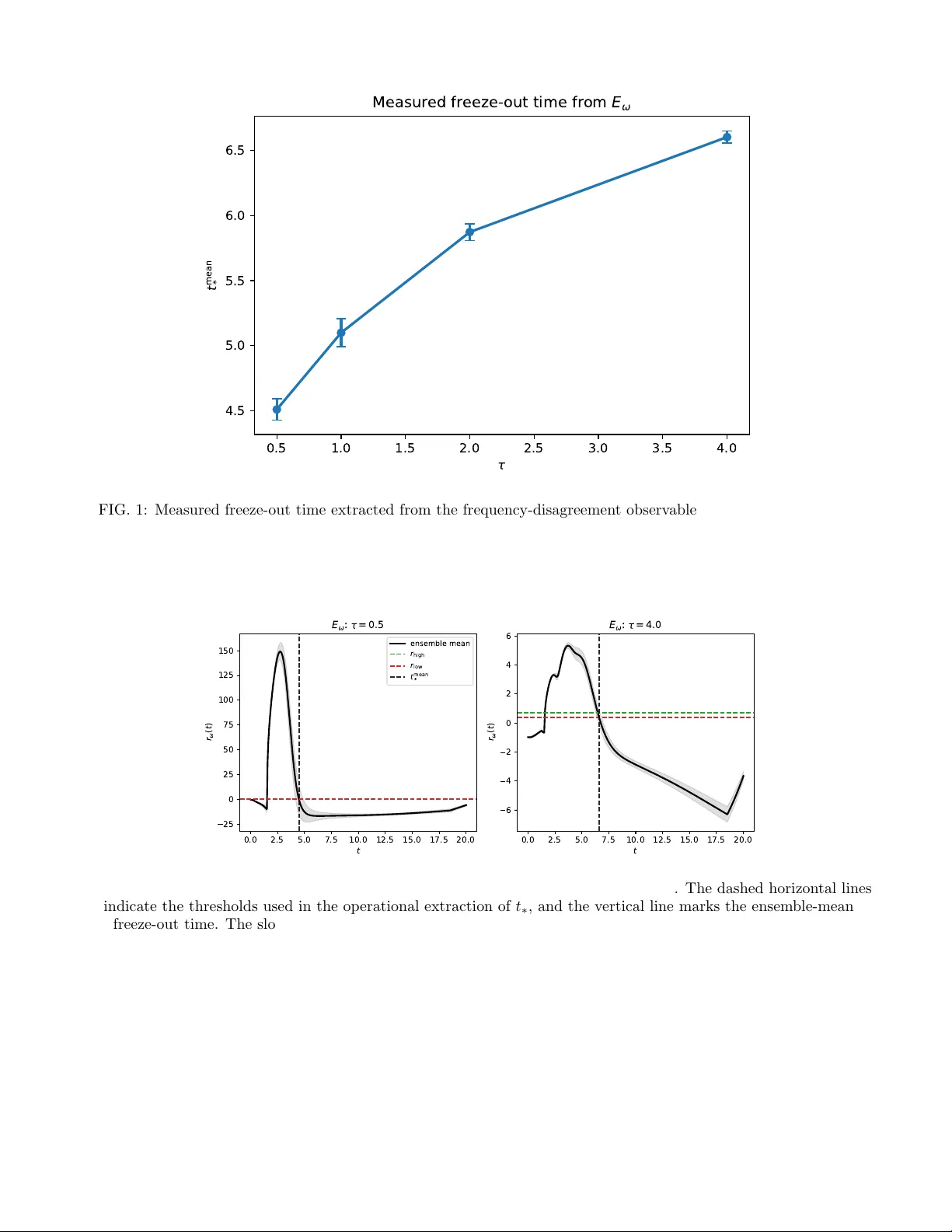
Op erational trac king loss in nonautonomous second-order oscillator net w orks V er´ onica Sanz 1 1 The or etic al Physics Department, Universitat de V al ` encia, and Instituto de F ´ ısic a Corpuscular (IFIC), CSIC–Universitat de V al` encia, Sp ain (Dated: Marc h 23, 2026) W e study when a net w ork of coupled oscillators with inertia ceases to follow a time-dep endent driving protocol coheren tly , using a simplified graph-based mo del motiv ated by in verter-dominated energy systems. W e sho w that this loss of trac king is diagnosed most clearly in the frequency dynam- ics, rather than in phase-based observ ables. Concretely , a tracking ratio built from the frequency- disagreemen t observ able E ω ( t ) and normalized by the instantaneous second-order mo dal decay rate yields a robust proto col-dependent freeze-out time whose relative disp ersion decreases with system size. Graph top ology matters substantially: the resulting freeze-out time is only partly captured b y the algebraic connectivity λ 2 , while additional structural descriptors, particularly Fiedler-mo de lo calization and low-spectrum structure, impro ve the explanation of graph-to-graph v ariation. By con trast, phase-sector observ ables develop strong non-monotonic and underdamp ed structure, so simple diagonal lo w-mo de relaxation closures are not quantitativ ely reliable in the same regime. These results identify the frequency sector as the natural operational sector for nonautonomous trac king loss in second-order oscillator net works and clarify b oth the usefulness and the limits of reduced sp ectral descriptions in this setting. I. INTR ODUCTION Sync hronization in oscillator net w orks is often discussed in terms of the existence or stability of collectiv e states under fixed conditions. In man y systems of practical in terest, how ever, the more relev an t question is different: can the netw ork tr ack a coherent state while couplings, injections, or operating conditions ev olv e in time? This question is esp ecially natural in mo dern energy systems, where inv erter-ric h op eration, reduced effective inertia, and reconfiguration proto cols make nonautonomous collective dynamics increasingly relev ant. The purpose of this pap er is to develop a reduced dynamical description of suc h tracking loss in a minimal setting. W e do not attempt an engineering-grade mo del of a realistic grid. Instead, w e ask which observ ables pro vide the cleanest and most robust op erational signal of trac king loss in nonautonomous second-order oscillator net works, and to what exten t those observ ables admit an interpretable reduced description. A substantial literature has established the connection betw een oscillator-net w ork synchronization and reduced p o w er-grid mo dels, and has clarified b oth synchronization and transient-stabilit y questions in first- and second-order Kuramoto-t yp e settings. In particular, D¨ orfler and Bullo sho w ed ho w reduced pow er-net work dynamics can b e related to coupled-oscillator mo dels and deriv ed influential sync hronization criteria for complex oscillator net works and smart grids [1, 2]. More broadly , the inertial or second-order Kuramoto mo del has long b een used to study synchronization in settings where inertia and damping pla y an essential role, including p o wer-net w ork applications, and is kno wn to display ric her and qualitativ ely different behavior from the first-order model [3 – 6]. Recent w ork on renewable- dominated and con verter-ric h grids contin ues to stress the imp ortance of frequency dynamics, reduced inertia, and m ultiscale nonlinear stability questions in such mo dels [7, 8]. The con tribution of the present paper is differen t in emphasis. W e do not fo cus on sync hronization thresholds, basin stabilit y , or static op erating conditions. Instead, we study nonautonomous c oher ent tr acking under time-dep enden t coupling protocols and ask which observ ables pro vide the cleanest op erational indicator of trac king loss in second- order oscillator netw orks. Our main finding is that the relev ant reduced observ able is not primarily phase coherence but frequency disagreemen t: a tracking diagnostic built from E ω ( t ) and normalized b y the instan taneous second-order mo dal decay rate remains informative precisely where phase-sector reductions b ecome m uch less reliable. Our starting p oin t is a damp ed second-order phase dynamics on graphs with an explicitly time-dep endent coupling proto col. This level is sufficien t to incorporate inertia, damping, netw ork structure, and nonautonomous driving while remaining tractable enough for mo dal analysis. The conceptual nov elt y of the pap er is not the second-order netw ork mo del by itself, but the construction of an op erational frequency-sector diagnostic of nonautonomous trac king loss. More precisely , w e show that the frequency-disagreement observ able, when normalized by the instantaneous second- order mo dal deca y rate, remains informative precisely in the regime where phase-sector reductions become m uc h less reliable. Phase-sector observ ables suc h as phase disagreement and residual incoherence develop pronounced non- monotonic and underdamp ed b ehavior, so the simplest lo w-mo de env elope ideas inherited from first-order dynamics are not quantitativ ely reliable there. By contrast, a diagnostic based on the frequency-disagreement observ able E ω ( t ), normalized by the instantaneous second-order mo dal decay rate, gives a robust and proto col-sensitive crossov er time. 2 The main results are the follo wing. First, the frequency-based freeze-out time extracted from the normalized trac king ratio increases monotonically with the proto col timescale τ , with small run-to-run uncertaint y . By freeze-out time w e mean the op erational crossov er time at which the netw ork ceases to track the changing coupling proto col coheren tly . Second, the relative disp ersion of this op erational freeze-out time decreases as the num b er of no des grows, indicating that the diagnostic b ecomes sharper in larger net works. Third, graph topology matters: muc h of the graph- to-graph v ariation is organized by low-spectrum information, but the dep endence is not exhausted by the algebraic connectivit y λ 2 alone. A t in termediate ramps, additional structural descriptors such as Fiedler-mo de localization impro ve the explanation substantially , while in the slow er-ramp regime lo w-sp ectrum spacing b ecomes more relev an t. Finally , although the real part of the instantaneous second-order mo dal exp onent pro vides the correct normalization scale for the trac king diagnostic, the corresponding diagonal low-mode relaxation en velope is only quan titativ ely useful in the slo w-ramp regime. The pap er is organized as follows. Section I I in tro duces the mo del, observ ables, and op erational tracking diagnos- tic. Section II I derives the second-order mo dal rate used throughout the pap er. Section IV presents the proto col dep endence and observ able comparison. Section V studies scaling with system size and graph structure, including the role of descriptors beyond λ 2 . Section VI discusses the limits of diagonal low-mode relaxation env elopes. Section VI I summarizes the in terpretation and implications for future reduced mo dels of inv erter-motiv ated netw ork dynamics. I I. MODEL, OBSER V ABLES, AND OPERA TIONAL TRACKING LOSS A. Nonautonomous second-order oscillator netw ork W e consider a net w ork of N phase oscillators on an undirected graph with adjacency matrix A , with phases θ i ( t ) ∈ R and angular veloc ities ω i ( t ) = ˙ θ i ( t ). The dynamics is ˙ θ i = ω i , (1) M ˙ ω i = P i − Dω i − N X j =1 K ij ( t ) sin( θ i − θ j ) , (2) with uniform effectiv e inertia M > 0 and damping D > 0. The static mismatch terms satisfy P i P i = 0. This should b e regarded as a reduced oscillator mo del motiv ated by inv erter-dominated and microgrid-like netw ork dynamics, not as a full engineering mo del. W e fo cus on the simplest nonautonomous proto col, K ij ( t ) = K ( t ) A ij , (3) with K ( t ) = K 0 1 + t τ − α , K 0 > 0 , τ > 0 , α > 0 . (4) Here τ con trols the proto col timescale and α its sharpness. The regime that prov ed most informative in the numerical analysis b elo w is α = 3, for whic h the changing coupling comp etes strongly with the intrinsic second-order transient. B. Graph structure and sp ectral quantities The graph Laplacian is L = D − A , (5) with eigenv alues 0 = λ 1 < λ 2 ≤ λ 3 ≤ · · · ≤ λ N . (6) The algebraic connectivit y λ 2 sets the slo west linear sp ectral scale and remains an imp ortan t organizing quan tity throughout the pap er. Ho w ever, one of our conclusions is that the op erational tracking-loss time is not fully reducible to λ 2 alone in the second-order nonautonomous problem. W e study Erd˝ os–R´ enyi (ER), W atts–Strogatz (WS), and ring graphs. This allo ws us to contrast generic non-spatial graphs with a spatially constrained low-connectivit y family that b eha v es anomalously . 3 C. Collectiv e observ ables The complex order parameter is Z ( t ) = 1 N N X j =1 e i θ j ( t ) = R ( t )e iΨ( t ) , (7) where R ( t ) ∈ [0 , 1] measures phase coherence and Ψ( t ) is the collectiv e phase. Our phase-sector observ ables are the circular phase-disagreement energy E θ ( t ) = N X i =1 wrap [ − π ,π ) θ i ( t ) − Ψ( t ) 2 , (8) and the residual incoherence 1 − R ( t ). The central observ able of the present pap er is the frequency-disagreement energy E ω ( t ) = N X i =1 ω i ( t ) − ¯ ω ( t ) 2 , ¯ ω ( t ) = 1 N X i ω i ( t ) . (9) The numerical results sho w that this frequency-sector quan tity pro vides a muc h cleaner op erational signal of tracking loss than the phase-sector observ ables in the second-order regime considered here. D. Op erational trac king ratio The correct reference scale for the second-order problem is not the first-order rate K ( t ) λ 2 , but the real part of the slo west instan taneous mo dal exp onent. F or a linearized Laplacian mo de c α , M ¨ c α + D ˙ c α + K ( t ) λ α c α = 0 , (10) the instantaneous exp onen ts are µ α, ± ( t ) = − D ± p D 2 − 4 M K ( t ) λ α 2 M . (11) W e define the reference decay rate as the real part of the slow est mo de, Γ α ( t ) = D − p D 2 − 4 M K ( t ) λ α 2 M , D 2 ≥ 4 M K ( t ) λ α , D 2 M , D 2 < 4 M K ( t ) λ α . (12) This quan tity is the natural second-order analog of the first-order relaxation rate and will b e used throughout as a lo c al normalization scale. Using the frequency-disagreemen t observ able, we define the tracking ratio r ω ( t ) = − 1 2 ∂ t ln E ω ( t ) Γ 2 ( t ) , (13) where Γ 2 ( t ) denotes (12) ev aluated at λ 2 . Numerically , ∂ t ln E ω is estimated from a smoothed time series. In the fast-ramp case, the very early-time spike of r ω ( t ) should b e in terpreted as a launch-transien t effect of the logarithmic deriv ativ e rather than as the physical freeze-out even t itself; the extraction rule b elo w is designed to identify the first clear p ost-p eak loss of tracking. An op erational freeze-out time t ∗ is extracted from a first-p ost-peak rule: after a short initial transient, we identify the first p eak of r ω ( t ) ab o ve a high threshold and define t ∗ as the first later time at which the ratio drops b elo w a lo wer threshold for a sustained interv al. This definition prov ed robust across rep eated runs. 4 I II. SECOND-ORDER MOD AL SCALE AND ITS LIMITS The rate Γ α ( t ) provides a ph ysically meaningful second-order mo dal scale and is essen tial for normalizing the trac king diagnostic. This point is strongly supp orted b y the n umerics: using the first-order scale K ( t ) λ 2 leads to pathological b eha vior in the trac king ratio, whereas (12) restores a sensible and proto col-sensitive operational crosso ver. A stronger ansatz would be to use the corresp onding integrated env elope, exp − 2 Z t 0 Γ α ( s ) ds , (14) as a reduced relaxation mo del. Our numerical results show that this idea is only partly successful. In the frequency sector it b ecomes quantitativ ely reasonable in the slow er-ramp regime, but it do es not provide a uniformly accurate diagonal lo w-mo de description across the full protocol range. In the phase sector, where E θ and 1 − R become strongly non-monotonic and underdamped, the same diagonal-env elope idea fails m uch more decisively . Accordingly , the role of Γ α ( t ) in this pap er is tw ofold. First, it provides the correct lo cal second-order deca y scale and therefore the prop er normalization for the op erational trac king ratio. Second, it offers an asymptotic guide to slo w-ramp relaxation, but not yet a complete quantitativ e closure for all observ ables and proto cols. IV. PR OTOCOL DEPENDENCE AND OBSER V ABLE SELECTION W e b egin b y asking whether the frequency-based diagnostic pro duces a clean and proto col-sensitiv e crossov er time. Figure 1 summarizes the resulting operational freeze-out time and sho ws a clear monotonic increase with the proto col timescale τ . T o understand the underlying dynamics, Fig. 2 sho ws the corresp onding trac king ratio r ω ( t ) for representativ e fast and slow proto cols. The fast-ramp case exhibits an early sharp transient follow ed by a rapid loss of tracking, whereas the slow-ramp case remains close to zero for muc h longer b efore departing. Finally , Fig. 3 compares the freeze-out time extracted from three candidate observ ables: the phase-disagreement energy , a combined phase-plus-frequency quantit y , and the pure frequency-disagreemen t energy E ω . The frequency sector giv es the cleanest and most monotonic dependence on τ , while the phase sector remains w eak er and more am biguous. This motiv ates our choice of E ω as the primary observ able for the rest of the pap er. In additional chec ks, the monotonic dep endence of the extracted freeze-out time on τ remained stable under mo derate v ariations of the smo othing window and threshold c hoices entering the op erational definition of t ∗ . These c hanges shift the absolute calibration of the crossov er time, but they do not alter the qualitative proto col dependence. This is the first main p ositiv e result of the pap er: once the observ able and normalization are c hosen in a wa y appropriate to the second-order problem, coheren t-tracking loss b ecomes a robust and proto col-sensitiv e crossov er phenomenon. V. SCALING WITH SYSTEM SIZE AND ADJACENCY STRUCTURE A. Scaling with the num b er of no des A cen tral question is whether the frequency-based diagnostic is a finite-size artifact or a robust collective quantit y . Figure 4 shows the freeze-out time as a function of system size for WS graphs and sev eral proto col timescales. The op erational crossov er remains well defined as N grows and retains its monotonic dep endence on τ . Ev en more imp ortan tly , the relative disp ersion decreases with size. Figure 5 shows the co efficient of v ariation of t ∗ , whic h drops systematically as N increases. Th us the E ω -based diagnostic b ecomes sharp er and more self-av eraging in larger net works. B. Dep endence on adjacency structure W e next examine how the op erational freeze-out time dep ends on the structure of A ij . Figure 6 plots t ∗ against the algebraic connectivity λ 2 for ER, WS, and ring graphs at fixed N . There is a clear sp ectral trend: graphs with larger λ 2 tend to exhibit different trac king-loss times than graphs with v ery small λ 2 . How ev er, the data do not collapse onto 5 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0 6.5 t m e a n * M e a s u r e d f r e e z e - o u t t i m e f r o m E FIG. 1: Measured freeze-out time extracted from the frequency-disagreemen t observ able E ω as a function of the proto col timescale τ , using the second-order normalized trac king ratio (13). Error bars sho w the standard error ov er realizations. The monotonic increase with τ demonstrates that the frequency-based diagnostic is sensitive to the rate of nonautonomous driving. 0.0 2.5 5.0 7.5 10.0 12.5 15.0 17.5 20.0 t 25 0 25 50 75 100 125 150 r ( t ) E : = 0 . 5 ensemble mean r h i g h r l o w t m e a n * 0.0 2.5 5.0 7.5 10.0 12.5 15.0 17.5 20.0 t 6 4 2 0 2 4 6 r ( t ) E : = 4 . 0 FIG. 2: F requency-based tracking ratio r ω ( t ) for represen tative fast and slow proto cols. The dashed horizontal lines indicate the thresholds used in the op erational extraction of t ∗ , and the vertical line marks the ensemble-mean freeze-out time. The slow proto col delays the loss of coherent tracking substantially relative to the fast one. a single universal curve. Graph families with comparable av erage degree or comparable λ 2 can still differ noticeably in t ∗ . Alternativ e scalar summaries such as mean degree lead to the same qualitativ e conclusion: simple graph-level descriptors organize the data only partially . T ak en together, these results sho w that the second-order frequency-sector freeze-out time is influenced by adjacency structure in a wa y that is only partly captured by λ 2 . The algebraic connectivity remains an imp ortant organizing descriptor, but topology b ey ond the slow est sp ectral scale matters. 6 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 3.0 3.5 4.0 4.5 5.0 5.5 6.0 6.5 t m e a n * Observable comparison with second- or der nor malization E E + E FIG. 3: Comparison of op erational freeze-out times obtained from different observ ables. The frequency-disagreemen t observ able E ω pro duces the clearest and most monotonic proto col dep endence. The com bined observ able E θ + E ω sho ws a similar but weak er trend, while the phase-sector observ able by itself is less informativ e in the second-order regime. C. Bey ond λ 2 : additional structural descriptors T o sharp en the previous conclusion, we tested a small set of graph-level descriptors b ey ond λ 2 . In addition to the algebraic connectivity itself, we consider the low-spectrum spacing ∆ 23 := λ 3 − λ 2 , the ratio ρ 23 := λ 3 /λ 2 , the mean path length, the clustering co efficient, and the inv erse participation ratio of the Fiedler eigenv ector u (2) , IPR 2 := P i ( u (2) i ) 4 P i ( u (2) i ) 2 2 . Larger IPR 2 corresp onds to stronger lo calization of the slo west non trivial Laplacian mo de. The motiv ation for including IPR 2 is simple. If the slow est mo de is strongly lo calized, then the b ottleneck controlling the net work’s slow est collective resp onse is concentrated on a smaller subset of no des, so the op erational freeze-out time may dep end not only on the v alue of the slow est sp ectral scale but also on how spatially distributed that mo de is across the graph. The goal here is not to build a predictive regression mo del, but to determine which simple descriptors materially impro ve the explanation of graph-to-graph v ariation in t ∗ . The regressions rep orted b elo w should therefore b e read as exploratory diagnostics of structural relev ance, not as final predictive models. The results show a clear regime dep endence. In the fast-ramp regime, none of the tested descriptors explains m uch of the v ariance, indicating that the crossov er is dominated b y transient effects rather than static graph structure. A t intermediate ramps, b y contrast, λ 2 already has substan tial explanatory p ow er, but the inclusion of one extra structural descriptor improv es the picture significantly . Among the candidates tested, the strongest single refinement is the Fiedler-mo de lo calization measure IPR 2 , while clustering and path length also help. In the slow-ramp regime, 7 40 60 80 100 120 140 160 N 4.0 4.5 5.0 5.5 6.0 6.5 7.0 7.5 t m e a n * Size scaling for WS graphs = 0 . 5 = 1 . 0 = 2 . 0 = 4 . 0 FIG. 4: Size scaling of the frequency-based freeze-out time for WS graphs. The op erational crossov er remains w ell defined across system sizes and retains a clear dep endence on the proto col timescale. the dep endence on λ 2 w eakens somewhat, but low-spectrum structure still matters, with λ 3 /λ 2 pro viding the cleanest single improv emen t b eyond λ 2 . This is an imp ortant refinemen t of the top ology story . The graph dependence of t ∗ is not arbitrary , nor is it exhausted by one scalar descriptor. Instead, the op erational freeze-out time is organized by a small set of structural quan tities whose relev ance depends on the proto col regime: transien t-dominated fast ramps, lo calization-sensitive in termediate ramps, and slo w er-ramp regimes in whic h the shape of the lo w end of the sp ectrum b ecomes more relev an t. VI. SLO W-RAMP ENVELOPES AND THE LIMITS OF DIAGONAL LO W-MODE CLOSURES A natural secondary question is whether the same second-order mo dal rate that normalizes the tracking ratio can also supp ort a quan titative relaxation theory . The asso ciated fit-quality summary is sho wn in Fig. 8. The results are mixed. The second-order diagonal-env elope picture is not uniformly successful across the full proto col range: fit quality is p o or in the fast-ramp regime and impro ves only progressively as the ramp slows. By τ = 4, the description b ecomes reasonable, but at smaller τ it is not a convincing quantitativ e closure. The impro vemen t from one mo de to t wo modes is real but mo dest. This should not b e viewed as a con tradiction of the op erational tracking result. Rather, it establishes a separation b et w een tw o roles pla yed b y the second-order mo dal rate. As a lo c al r efer enc e sc ale , it is exactly what is needed to normalize the frequency-based tracking diagnostic. As a glob al diagonal r elaxation envelop e , how ever, it is only asymptotically useful in the slo wer-ramp regime. In the faster regime, additional transien t and nonlinear effects remain imp ortan t. F or this reason we regard the en velope analysis as a secondary , regime-dep endent indication rather than as a co equal pillar of the pap er’s main contribution. VI I. DISCUSSION The main result of the pap er is not a univ ersal relaxation theory for all second-order observ ables. It is a more selectiv e and, in our view, more useful statement. In this sense, the paper should b e viewed as complementary to the classical synchronization and transient-stabilit y literature on Kuramoto-type p o wer-net w ork reductions: rather 8 40 60 80 100 120 140 160 N 0.02 0.04 0.06 0.08 0.10 0.12 0.14 0.16 C V ( t * ) R e l a t i v e d i s p e r s i o n o f t * v s N = 0 . 5 = 1 . 0 = 2 . 0 = 4 . 0 FIG. 5: Co efficien t of v ariation of the frequency-based freeze-out time as a function of system size for WS graphs. The decrease with N indicates that the diagnostic bec omes sharp er and less noisy in larger netw orks. In the fast-ramp case, the initial spike reflects a launch-transien t effect of the logarithmic deriv ative and do es not by itself define the operational freeze-out even t. than deriving new sync hronization criteria, we isolate an operational diagnostic of tr acking loss under explicitly time-dep enden t driving. In the second-order nonautonomous problem, the frequency sector pro vides the cleanest op erational picture of coheren t-tracking loss. A tracking ratio based on E ω , normalized by the instantaneous second-order mo dal decay rate, yields a robust crosso ver time that dep ends systematically on the proto col, sharp ens with system size, and is sensitiv e to graph structure. This makes it a promising reduced indicator of nonautonomous trac king loss in net w ork ed oscillator systems motiv ated by in verter-ric h energy dynamics. A t the same time, the results exp ose the limits of the simplest reduced sp ectral picture. Graph top ology matters b ey ond a single scalar descriptor suc h as λ 2 , and the most informativ e correction is not universal across proto cols: lo calization-sensitiv e quantities are most useful at intermediate ramps, while low-spectrum spacing matters more in the slow er-ramp regime. Diagonal low-mode relaxation env elop es are only asymptotically successful, and the phase sector exhibits strongly non-monotonic underdamped b eha vior that resists the naiv e low-mode closures inherited from first-order intuition. This dual outcome should be seen as a gain in clarity rather than a weakness. It identifies the sector in which a reduced op erational diagnostic is already reliable and the sector in which a stronger theory is still needed. In future work, the natural next steps are to clarify the role of the low end of the sp ectrum more systematically , to determine whether a minimal tw o-descriptor structural theory of t ∗ can b e form ulated, and to inv estigate whether ric her mo dal-interaction corrections can improv e the slo w-ramp env elop e picture. F rom the p oin t of view of applications, the present pap er should be read as a bridge. It do es not pro vide an engineering tool for realistic p o w er-system op eration. It do es sho w, ho wev er, that a frequency-based reduced indicator of trac king loss can be defined in a nonautonomous second-order net work mo del and that this indicator exhibits robust scaling with proto col, size, and top ology . That is precisely the kind of reduced dynamical ingredient one would wan t b efore moving tow ard richer in verter-dominated netw ork mo dels. 9 0 1 2 3 4 5 6 2 4.3 4.4 4.5 4.6 4.7 t m e a n * = 0 . 5 0 1 2 3 4 5 6 2 4.6 4.8 5.0 5.2 5.4 5.6 5.8 t m e a n * = 1 . 0 0 1 2 3 4 5 6 2 5.2 5.4 5.6 5.8 6.0 t m e a n * = 2 . 0 0 1 2 3 4 5 6 2 6.2 6.3 6.4 6.5 6.6 6.7 t m e a n * = 4 . 0 ER p=0.08 ER p=0.12 ER p=0.18 WS p=0.05 WS p=0.15 WS p=0.35 ring FIG. 6: F requency-based freeze-out time versus algebraic connectivity λ 2 for ER, WS, and ring graphs at fixed N , sho wn for several proto col timescales. The dep endence is clearly structured but do es not collapse to a univ ersal one-parameter function of λ 2 . VI II. CONCLUSION W e hav e introduced and tested a frequency-based operational diagnostic of coherent-trac king loss in nonautonomous second-order oscillator net works. The diagnostic is built from the frequency-disagreemen t observ able E ω and normal- ized by the instantaneous second-order mo dal decay rate. In this form it yields a clear and robust proto col-dependent freeze-out time. The resulting op erational crossov er sharp ens with increasing system size, confirming that the signal is not a fragile finite-size artifact. It also depends systematically on graph structure. The algebraic connectivity λ 2 pro vides an imp ortan t first organizing descriptor, but the graph dependence is better understo o d through a small set of low- sp ectrum and structural quan tities, especially Fiedler-mode lo calization at in termediate ramps and lo w-sp ectrum spacing in the slow er-ramp regime. Spatially constrained graphs such as rings form a distinct non-generic regime. Finally , we hav e sho wn that the same second-order mo dal scale that works w ell as a lo cal normalization principle do es not yet provide a universally accurate diagonal low-mode relaxation closure. The cen tral lesson is therefore sector- dep enden t: in the second-order nonautonomous problem the frequency sector supp orts a robust reduced op erational description of tracking loss, whereas the phase sector do es not. The latter remains muc h less reducible and app ears to require additional structural information and richer, likely non-diagonal, dynamics b eyond the simplest low-mode picture. Bey ond the sp ecific oscillator mo del studied here, the present results suggest a broader c lass of application domains in which reduced diagnostics of nonautonomous trac king loss may be useful. The most immediate examples are con verter-ric h p ow er systems and microgrids, where reduced inertia, reconfiguration, and time-dep enden t op erating conditions make frequency tracking more relev ant than static synchronization alone. More generally , the same logic ma y apply to netw ork ed control arc hitectures in whic h couplings or effective gains evolv e in time, including co ordinated in verter arra ys, electromechanical oscillator netw orks, and p ossibly m ulti-agen t systems suc h as robotic or drone sw arms operating under time-v arying communication or control conditions. In all such cases, the v alue of the present study is not that it provides an engineering-ready prediction tool, but that it iden tifies a compact dynamical diagnostic principle: in second-order nonautonomous net works, loss of coherent tracking may b e detected most cleanly in the 10 all_small lam2+ipr2 lam2+clustering lam2+pathlen lam2+ratio32 lam2+gap23 lam2 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 R 2 D e s c r i p t o r - m o d e l c o m p a r i s o n f o r t m e a n * = 0 . 5 = 1 . 0 = 4 . 0 FIG. 7: Comparison of simple descriptor mo dels for the graph-to-graph v ariation of the frequency-based freeze-out time. A t fast ramps, no static descriptor p erforms w ell. At intermediate ramps, λ 2 already explains a substantial fraction of the v ariation, but the inclusion of additional structural information—esp ecially Fiedler-mo de lo calization—impro v es the description significantly . At slo wer ramps, lo w-sp ectrum structure such as λ 3 /λ 2 b ecomes the most useful single refinement b ey ond λ 2 . frequency sector, and its dep endence on netw ork structure is only partly reducible to a single sp ectral scale. [1] F. D¨ orfler and F. Bullo, SIAM Journal on Con trol and Optimization 50 , 1616 (2012). [2] F. D¨ orfler, M. Chertk ov, and F. Bullo, Proceedings of the National Academy of Sciences 110 , 2005 (2013). [3] G. Filatrella, A. H. Nielsen, and N. F. Pedersen, Europ ean Physical Journal B 61 , 485 (2008). [4] F. D¨ orfler, J. W. Simpson-Porco, and F. Bullo, Pro ceedings of the IEEE 106 , 977 (2018). [5] G. ´ Odor and B. Hartmann, Physical Review E 106 , 064311 (2022). [6] S.-Y. Ha, M. Kang, and J. Park, Chaos 31 , 113113 (2021). [7] R. Ma et al. , Chaos 33 , 023122 (2023). [8] B. Hartmann et al. , Chaos 35 , 013138 (2025). 11 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 R 2 F i t q u a l i t y f o r E E : 1 - m o d e E : 2 - m o d e FIG. 8: Fit quality for the one-mo de and tw o-mo de diagonal-en velope descriptions of E ω ( t ). The second-order en velope improv es significantly in the slo w-ramp regime, but remains weak for faster proto cols.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment