Evaluating Smartphone GNSS Accuracy for Geofenced 6 GHz Operations
The recently deployed 6 GHz spectrum in the U.S. utilizes distinct power categories, with the latest proposed "Geofenced Variable Power" (GVP) category permitting indoor and outdoor operations without continuous Automated Frequency Coordination (AFC)…
Authors: Joshua Roy Palathinkal, Hardani Ismu Nabil, Muhammad Iqbal Rochman
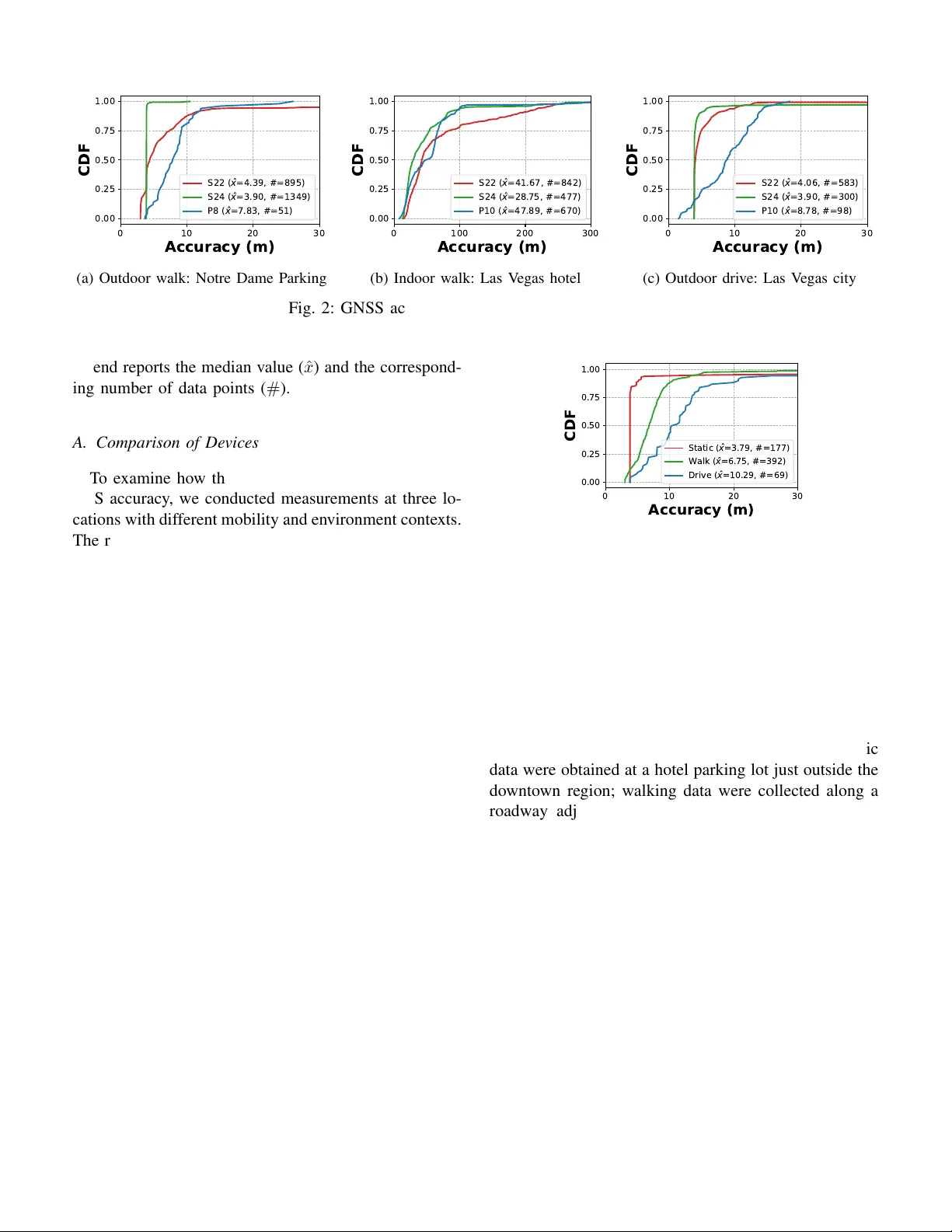
Ev aluating Smartphone GNSS Accurac y for Geofenced 6 GHz Operations Joshua Roy P alathinkal ∗ ‡ , Hardani Ismu Nabil † , Muhammad Iqbal Rochman ∗ , Hossein Nasiri ∗ , Francis A. Gatsi ∗ , and Monisha Ghosh ∗ ∗ Uni versity of Notre Dame, USA, † Sebelas Maret Uni versity , Indonesia. ‡ Corresponding Author Email: joshuaroy873@gmail.com Abstract —The recently deploy ed 6 GHz spectrum in the U .S. utilizes distinct po wer categories, with the latest proposed “Geofenced V ariable P ower” (GVP) category permitting indoor and outdoor operations without con- tinuous A utomated Frequency Coordination (AFC) by relying instead on local databases of exclusion zones. Consequently , the safe operation of GVP devices depends entirely on r eliable GNSS localization to respect these geofences. Howev er , GNSS accuracy is highly variable and significantly degrades in en vironments like urban canyons or indoors. This paper presents the first compr ehensive empirical study ev aluating GNSS reliability specifically for GVP compliance. Utilizing the SigCap Android ap- plication, we document and compare GNSS accuracy across an extensive array of real-world conditions, en- compassing urban versus suburban landscapes, varying mobility states (stationary , walking, driving), and indoor versus outdoor settings. The r esults demonstrate that while device hardwar e causes variations in GNSS accuracy , the operational en vironment is the primary driver of error . Indoor settings and dense urban ar eas consistently degrade localization. Mor eover , outdoor positions adjacent to b uild- ings often surprisingly produce significant inaccuracies, even near low-elevation structures. W e further analyze the contribution of different GNSS constellations to device positioning and show that satellites from non-U .S.-licensed constellations—although currently used in a substantial portion of location fixes—are not permitted for regulatory geolocation under FCC requirements. Index T erms —6 GHz, spectrum sharing, GNSS, accu- racy , GVP . I . I N T RO D U C T I O N & B AC K G R O U N D The 6 GHz spectrum has been widely deployed in the U.S. under many different po wer regimes designed to avoid interference with the incumbents (fixed links, satellite, Broadcast Auxiliary Service, etc). These rules establish primary categories: Standard Power (SP), al- lo ws the highest power le vel but requires grants from an Automated Frequency Coordination (AFC) system; LPI: 5 dBm/MHz, max EIRP 30 dBm SP SP: 23 dBm/MHz, max EIRP 36 dBM U-NII-5 U-NII-6 U-NII-7 U-NII-8 5925 MHz 6425 MHz 6875 MHz 7125 MHz 1200 MHz 6525 MHz VLP: - 5 dBm/MHz, max EIRP 14 dBm GVP GVP: 11 dBm/MHz, max EIRP 24 dBM Fixed, Satellite Uplink Satellite Uplink, BAS, CTRS Fixed, Satellite Uplink/Downlink Fixed, Satellite, BAS INCUMBENTS: Fig. 1: Spectrum Bands and Power Rules in 6 GHz. Lo w-Power Indoor (LPI), which mandates lo wer power and restricts operation to indoor en vironments without an AFC requirement; and the recently released V ery Lo w Po wer (VLP) category , enabling access for IoT and wearable devices with the lowest po wer le vel and no AFC and indoor requirements. Fig. 1 summarizes the po wer and spectrum limitation for each power category . W ith a recent Report and Order (R&O) and Further Notice of Proposed Rulemaking (FNPRM), the Federal Communications Commission (FCC) in the U.S. intends to authorize a new po wer category: Geofenced V ariable Po wer (GVP) [1]. Devices utilizing this mode will be permitted to operate indoors or outdoors with a Power Spectral Density (PSD) limit of 11 dBm/MHz and a maximum EIRP of 24 dBm. Rather than obtaining autho- rization from the AFC, these devices will rely on a local database of exclusion zones to a void interfering with incumbents. Consequently , the ability of GVP de vices to operate safely within geofenced zones is heavily dependent on the reliability of the Global Navigation Satellite Systems (GNSS) localization—a technology often mistakenly referred to as GPS. FCC certification guidance further requires that the GNSS source used for geofencing originate only from T ABLE I: Data and location summary . Location En viron- ment De- vices # Data- points Chicago, IL Urban S22 199 P8 565 South Bend, IN Suburban S22 2742 S24 1482 P8 215 Ames, IA Semi- S22 2789 rural S24 1118 San Diego, CA Urban S22 1740 Las V egas, NV Urban S22 1425 S24 1583 P10 869 satellites licensed or approv ed by the United States under 47 CFR §25.137 [2, 3]. Signals from non-approved constellations such as GLONASS or BeiDou therefore cannot be used for regulatory geolocation. This con- straint increases reliance on the remaining permitted satellites. Ho wever , GNSS accurac y varies significantly with device capability and en vironment ( e.g., degraded performance indoors or in urban canyons) [4, 5]. Con- sequently , channel av ailability decisions should rely on real-time reported location accuracy rather than fixed accuracy values deriv ed from controlled laboratory en- vironments. In our prior work, we exploit GNSS inaccuracies— manifested as low recei ved signal strength attributed to building loss and satellite elev ation—to predict whether a de vice is indoors or outdoors [6]. In this work, we extend that in vestigation to study GVP compliance. While there is a considerably body of work on the empirical analysis of GNSS accuracy in smartphones [7– 9], these are focused on a single environment and mobility mode. T o the best of our knowledge, this is the first study to comprehensiv ely document and compare GNSS accuracy in real-world en vironments. W e utilize the SigCap Android application across an extensi ve array of signal en vironments, e.g., , urban vs. suburban, stationary vs. walking vs. dri ving, and indoor vs. outdoor . Additionally , we analyze the contribution of non-U.S.-licensed satellite constellations to the reported geolocation estimates. I I . M E T H O D O L O G Y , T O O L S A N D D E P L OY M E N T Our empirical ev aluation of GNSS accuracy relies on data collected via the SigCap Android applica- tion [10], deployed on several smartphones operating in di verse en vironments. While SigCap is primarily utilized to crowdsource W i-Fi and 4G/5G cellular signal information through nati ve Android APIs, its rigorous data-logging pipeline ensures that ev ery measurement is precisely time-stamped and location-tagged. Addi- tionally , each time-stamped measurement includes in- formation about the specific satellites contrib uting to the positioning solution from the four major GNSS constellations—GPS (United States), Galileo (European Union), BeiDou (China) and GLONASS (Russia). For this study , we extract these associated GNSS coordinates and their corresponding estimated accuracy . Specifically , this accuracy v alue represents the horizontal radius of a circle centered at the reported coordinates, within which the de vice’ s true location lies with a 68% con- fidence le vel [11]. Moreov er , Android utilizes the Fused Location Pro vider [12] which combines signals from GNSS satellites, cellular PCIs, and W i-Fi BSSIDs: Con- sequently , the reported accuracy values reflect the most refined localization estimate the device can produce, e ven in locations where GNSS performance may be suboptimal. T able I summarizes the measurement locations and smartphone models utilized in this study . Data was collected across three distinct environments: dense urban canyons with high-rise sk yscrapers (Chicago, San Diego, and Las V egas); suburban residential and campus en vi- ronments (University of Notre Dame, South Bend); and semi-rural areas (Iow a State Uni versity , Ames). T o en- sure hardware di versity , measurements in these locations were taken using four Android models: Google Pixel 8 (P8), Google Pixel 10 Pro (P10), Samsung Galaxy S22+ (S22), and Samsung Galaxy S24+ (S24). In most of the locations, to establish accurate ground truth, each dataset was manually annotated with its corresponding mobility state ( i.e., , stationary , walking, driving) and en- vironmental context ( i.e., , indoors, outdoors). T o mimic natural usage, de vice placement varied by mobility state: phones were held at chest lev el while walking; mounted on the dashboard or placed on the passenger seat while dri ving; and either held at chest le vel or resting on a table while stationary . Since measurements were captured at 5-second interv als, the final dataset dataset analyzed in this paper comprises 14,727 data points across all en vironments and devices, representing approximately 20 hours of data collection. I I I . R E S U LT S & D I S C U S S I O N S The results are primarily presented using cumulativ e distribution function (CDF) curv es. For each curve, the 0 10 20 30 Accuracy (m) 0.00 0.25 0.50 0.75 1.00 CDF S 2 2 ( x = 4 . 3 9 , # = 8 9 5 ) S 2 4 ( x = 3 . 9 0 , # = 1 3 4 9 ) P 8 ( x = 7 . 8 3 , # = 5 1 ) (a) Outdoor walk: Notre Dame Parking 0 100 200 300 Accuracy (m) 0.00 0.25 0.50 0.75 1.00 CDF S 2 2 ( x = 4 1 . 6 7 , # = 8 4 2 ) S 2 4 ( x = 2 8 . 7 5 , # = 4 7 7 ) P 1 0 ( x = 4 7 . 8 9 , # = 6 7 0 ) (b) Indoor walk: Las V eg as hotel 0 10 20 30 Accuracy (m) 0.00 0.25 0.50 0.75 1.00 CDF S 2 2 ( x = 4 . 0 6 , # = 5 8 3 ) S 2 4 ( x = 3 . 9 0 , # = 3 0 0 ) P 1 0 ( x = 8 . 7 8 , # = 9 8 ) (c) Outdoor driv e: Las V eg as city Fig. 2: GNSS accuracy across UE makes and models legend reports the median v alue ( ˆ x ) and the correspond- ing number of data points ( # ). A. Comparison of Devices T o e xamine ho w the phone make and model impacts GPS accuracy , we conducted measurements at three lo- cations with different mobility and en vironment conte xts. The results are summarized in Fig. 2, where Fig. 2a, 2b and 2c correspond to the outdoor walking, indoor walk- ing, and outdoor dri ving measurements, respectively . Outdoor walking measurements were collected in a park- ing lot on the Uni versity of Notre Dame campus. Indoor walking data were gathered inside a 28-story high-rise hotel-casino in Las V e gas, with an approximate floor area of ∼ 6,700 m 2 . Outdoor dri ving measurements were conducted across Las V egas, with particular emphasis on road segments adjacent to high-rise hotels along the Las V egas Strip. The results demonstrate that Samsung UEs exhibit consistent performance between the S22 and S24 models in outdoor en vironments, with a better median accuracy of under 5 m for both pedestrian and vehicular mobility . In contrast, Google Pixel devices show consistently poorer accuracy than Samsung devices, while remaining broadly similar across Pixel models (P8 vs. P10). W e note that not all Pix el models were av ailable across all outdoor scenarios; in particular , both P8 and P10 were not measured in the outdoor walking dataset (Fig. 2) and the outdoor driving dataset (Fig. 2c). For indoor walking (Fig. 2b), GPS accuracy degrades substantially across all de vices. Under these conditions, the Samsung models di ver ge more noticeably (41.67 m for S22 vs. 28.75 m for S24), and the P10 yields the largest error (47.89 m). These results highlight the v ariability of localization accuracy across different de vices, a factor that must be 0 10 20 30 Accuracy (m) 0.00 0.25 0.50 0.75 1.00 CDF S t a t i c ( x = 3 . 7 9 , # = 1 7 7 ) W a l k ( x = 6 . 7 5 , # = 3 9 2 ) D r i v e ( x = 1 0 . 2 9 , # = 6 9 ) Fig. 3: Outdoor mobility: San Diego downto wn carefully considered in the practical implementation of GVP rules. B. Comparison of Mobility Modes For §III-B and §III-C, we use the Samsung S22 as the representati ve UE unless stated otherwise. Results for dif ferent outdoor mobility modes are shown in Fig. 3. The measurements were collected in San Diego: static data were obtained at a hotel parking lot just outside the do wntown re gion; walking data were collected along a roadway adjacent to the San Die go Bay; and dri ving data were collected while traversing do wntown streets characterized by high-rise b uildings. The results show clear variation in GPS accurac y across mobility modes, with the best performance under static conditions (me- dian 3.79 m), follo wed by walking (6.75 m), and the poorest performance under driving (10.29 m). C. Comparison of Envir onments 1) Building Effect: Fig. 4 summarizes GPS accu- racy during walking measurements collected in multiple regions around a building on the Uni versity of Notre Dame campus. As illustrated in Fig. 4a, we consider three regions: Box1 , a path immediately adjacent to the building (with the building wall on one side and open (a) Regions ov erview 0 10 20 30 Accuracy (m) 0.00 0.25 0.50 0.75 1.00 CDF B o x 1 ( x = 8 . 4 0 , # = 3 5 5 ) B o x 2 ( x = 4 . 0 7 , # = 1 3 3 ) B o x 3 ( x = 1 0 . 3 4 , # = 5 3 0 ) (b) W alk: Notre Dame Fig. 4: GPS accuracy by en vironment (Notre Dame) space on the other); Box2 , a path approximately 15 m aw ay from the b uilding; and Box3 , an indoor path on the first floor . The building is characterized by thick walls. As shown in Fig. 4b, moving from Box1 to Box2 yields a substantial improvement in median accuracy , from 8.4 m to 4.07 m. This indicates that proximity to the b uilding degrades GPS accuracy by approximately 4.33 m. In Box3 (indoors), the median accuracy further degrades to 10.34 m, corresponding to a indoor-to-outdoor median accuracy reduction of approximately 6.27 m relati ve to the outdoor Box2 region. 2) Urban and Semi-Rural En vir onments: A similar indoor-to-outdoor transition ef fect is also evident in the Las V egas measurements for the S22. Comparing indoor walking in Fig. 2b to outdoor dri ving in Fig. 2c, the median GPS error decreases by 37.61 m. The larger magnitude of this transition relati ve to the Notre Dame results is plausibly attributable to differences in the built en vironment, as the Las V egas hotel structure is substantially taller (28 floors) than the Notre Dame campus building (3 floors). Another two examples comparing semi-rural and ur- ban en vironments are sho wn in Fig. 5. Fig. 5a presents measurements collected at Iowa State University , which can be characterized as a semi-rural setting with rela- ti vely low b uilding heights and sparse building density . The indoor measurements were taken inside a fiv e-story building with extensi ve glass facades, which can intro- 0 10 20 30 Accuracy (m) 0.00 0.25 0.50 0.75 1.00 CDF I n d o o r ( x = 1 6 . 3 8 , # = 1 1 6 0 ) O u t d o o r ( x = 3 . 9 0 , # = 1 6 2 3 ) (a) W alking regions: Iowa State University 0 10 20 30 Accuracy (m) 0.00 0.25 0.50 0.75 1.00 CDF D o w n t o w n ( x = 1 0 . 2 9 , # = 6 9 ) U p t o w n ( x = 4 . 1 9 , # = 6 1 6 ) (b) Driv e: San Diego Fig. 5: GPS accurac y by en vironment (Iowa & San Diego) duce additional attenuation and multi-path ef fects, while the outdoor measurements correspond to walking routes around campus. As shown in Fig. 5a, the median GPS error improves substantially in the indoor-to-outdoor transition, decreasing from 16.38 m indoors to 3.9 m outdoors—an improvement of 12.48 m. Fig. 5b reports driving measurements from two re- gions in San Diego: downto wn and uptown. Downto wn represents an urban en vironment with dense high-rise structures, whereas upto wn is more suburban, domi- nated by residential buildings, with the driving route primarily along Interstate 5. Consistent with the expected impact of dense urban infrastructure on GPS accuracy , do wntown exhibits poorer median accuracy (10.29 m) relati ve to upto wn (4.19 m), corresponding to a median dif ference of 6.1 m. D. Constellation Selection & Re gulatory Requirements In addition to en vironmental factors, geofencing op- erations in the 6 GHz band are subject to constella- tion restrictions. As discussed in §I, FCC certification guidance restricts geofencing localization to satellites licensed or approv ed by the United States. Under these rules, constellations such as GLONASS and BeiDou are not permitted for geofencing v alidation [2]. GPS Galileo Beidou GL ONAS S GPS Galileo Beidou GL ONAS S 0 5 10 15 20 Count (%) 2.9k 4.7k 4.2k 0 6.1k 6.0k 8.1k 2.6k L ower L -band Upper L -band (a) Histogram of satellite samples across L-bands 40 60 Percentage (%) 0.00 0.25 0.50 0.75 1.00 CDF U S A / E U ( x = 5 7 . 1 4 % , # = 7 7 9 ) O t h e r s ( x = 4 2 . 8 6 % , # = 7 7 9 ) (b) CDF of constellation contribution in location fixes Fig. 6: Histogram and CDF of satellite counts across L- bands and constellations All satellite samples analyzed in this section corre- spond to measurements where the usedInFix parame- ter is set to True , indicating that the satellite contrib uted to the device’ s geoposition calculation. Our empirical data indicate that these restrictions exclude a substantial portion of a vailable signals. Fig. 6a shows the distribution of satellite samples across L-bands for all observations in the dataset. Be- cause multiple satellite measurements are recorded at each timestamp, this figure reflects the total number of satellite observ ations rather than the number of distinct location fixes. As sho wn, BeiDou satellites are the most frequently observed signals in the upper L-band, with 8.1 × 10 3 samples. In the lower L-band, BeiDou ranks second with 4.2 × 10 3 samples, closely follo wing Galileo, which has the highest count at 4.7 × 10 3 samples. T o better capture the constellation composition of actual location fixes, Fig. 6b aggregates samples at the timestamp le vel. Specifically , multiple satellite obser- v ations recorded at the same timestamp are reduced to a single positioning instance, and the percentage contribution of dif ferent constellations is computed for that fix. In this figure, USA/EU refers to satellites from the GPS (United States) and Galileo (European Union) constellations, which are permitted for re gulatory geolocation, while Others refers to satellites from the BeiDou (China) and GLON ASS (Russia) constellations. The results sho w that BeiDou and GLON ASS together account for a median of 42.86% of the satellites used in location fixes. The FCC restriction imply that, for geofencing pur- poses, devices must disregard approximately 43% of the satellites currently used in location fix es. Consequently , localization may need to rely solely on the permitted subset of satellites, which may affect the accuracy of the coordinates used for geofence validation. I V . C O N C L U S I O N S & F U T U R E R E S E A R C H The addition of GVP de vices to the 6 GHz ecosystem will enable ne w applications and use-cases. Howe ver , since the 6 GHz band is shared with incumbents such as fixed micro wa ve links, it is imperati ve that sharing methodologies be rob ust while enhancing spectrum uti- lization. Localization techniques rely on GNSS, cellular, and W i-Fi signals to enhance positioning accurac y , and because the a vailability of these signals depends on the local environment, it is essential that GVP rules require channel selection to consider the device’ s measured localization accuracy rather than a static, lab-certified v alue that does not reflect real-world conditions. In addition, regulatory restrictions on GNSS constellations may further reduce the number of satellites av ailable for positioning, which can affect the accurac y used for geofence validation. This paper presents a first-of-its-kind analysis of ex- tensi ve real-world measurements demonstrating the vari- ability of location accuracy across div erse en vironments, and e xamines the role of dif ferent GNSS constellations in device positioning. These results support the need for accurac y-aw are channel selection in GVP devices. As GVP sharing mechanisms mature, future work will explore methods to improve spectrum sharing while ensuring reliable incumbent protection. R E F E R E N C E S [1] Federal Communications Commission, “F ourth Re- port & Order and Third Further Notice of Proposed Rulemaking; Expanding Unlicensed Operations in the 6 GHz Band, ” Retrie ved from https://docs.fcc. gov/public/attachments/DOC- 417577A1.pdf, Jan. 2026. [2] Federal Communications Commission, “ Administrativ e notes and publication update – tcb workshop, ” https://www .fcc.gov/sites/default/files/ 13- Administrati ve- Notes- and- Publication- Update Apr 2025 Final- TCB.pdf, Apr . 2025, Office of Engineering and T echnology , Laboratory Division. [3] Federal Communications Commission, “47 C.F .R. § 25.137 – Requests for U.S. Market Access Through Non-U.S.-Licensed Space Stations, ” https://www .ecfr .gov/current/title- 47/ chapter- I/subchapter - B/part- 25/subpart- B/ subject- group- ECFR34f9987bbfcd1a8/section- 25. 137, code of Federal Re gulations. [4] “Comments Of A T&T Services, Inc.; Expanding Flexible Use in Mid-Band Spectrum Between 3.7 and 24 GHz, ” Retriev ed from https://www .fcc.gov/ ecfs/document/10327028492354/1, Mar . 2024. [5] F . Zangenehnejad, Y . Jiang, and Y . Gao, “GNSS observ ation generation from smartphone android location API: performance of existing apps. Issues Improv Sens 23 (2): 777, ” 2023. [6] H. Nasiri, M. I. Rochman, and M. Ghosh, “In- door/outdoor spectrum sharing enabled by GNSS- based classifiers, ” in MILCOM 2025-2025 IEEE Military Communications Conference (MILCOM) . IEEE, 2025, pp. 330–337. [7] K. Merry and P . Bettinger , “Smartphone GPS ac- curacy study in an urban en vironment, ” PloS one , vol. 14, no. 7, p. e0219890, 2019. [8] C. Specht, P . Dabrowski, J. Pa welski, M. Specht, and T . Szot, “Comparativ e analysis of positioning accuracy of GNSS recei vers of Samsung Galaxy smartphones in marine dynamic measurements, ” Advances in Space Researc h , v ol. 63, no. 9, pp. 3018–3028, 2019. [9] G. M. Fu, M. Khider , and F . V an Diggelen, “ An- droid raw GNSS measurement datasets for precise positioning, ” in Pr oceedings of the 33rd interna- tional tec hnical meeting of the satellite division of the Institute of Navigation (ION GNSS+ 2020) , 2020, pp. 1925–1937. [10] S. Do ˘ gan-T usha, A. T usha, M. I. Rochman, H. Nasiri, and M. Ghosh, “Spectrum sharing char- acterization using smartphones: Exploring 6 GHz sharing through large-scale W i-Fi 6E measure- ments, ” IEEE Communications Magazine , v ol. 63, no. 2, 2025. [11] Android Dev elopers, “Location - API Reference, ” Retrie ved from https://de veloper .android.com/ reference/android/location/Location, Feb . 2026, accessed: Feb . 2026. [12] Android De velopers, “Fused Location Provider API, ” Retriev ed from https://de velopers.google. com/location- context/fused- location- pro vider, Feb . 2026, accessed: Feb . 2026.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment