Decentralized design of consensus protocols with minimal communication links based on directed spanning tree
This paper proposes a decentralized design approach of consensus protocols of multi-agent systems via a directed-spanning-tree(DST)-based linear transformation and the corresponding minimal communication links. First, the consensus problem of multi-a…
Authors: Yangzhou Chen, Lanhao Zhao
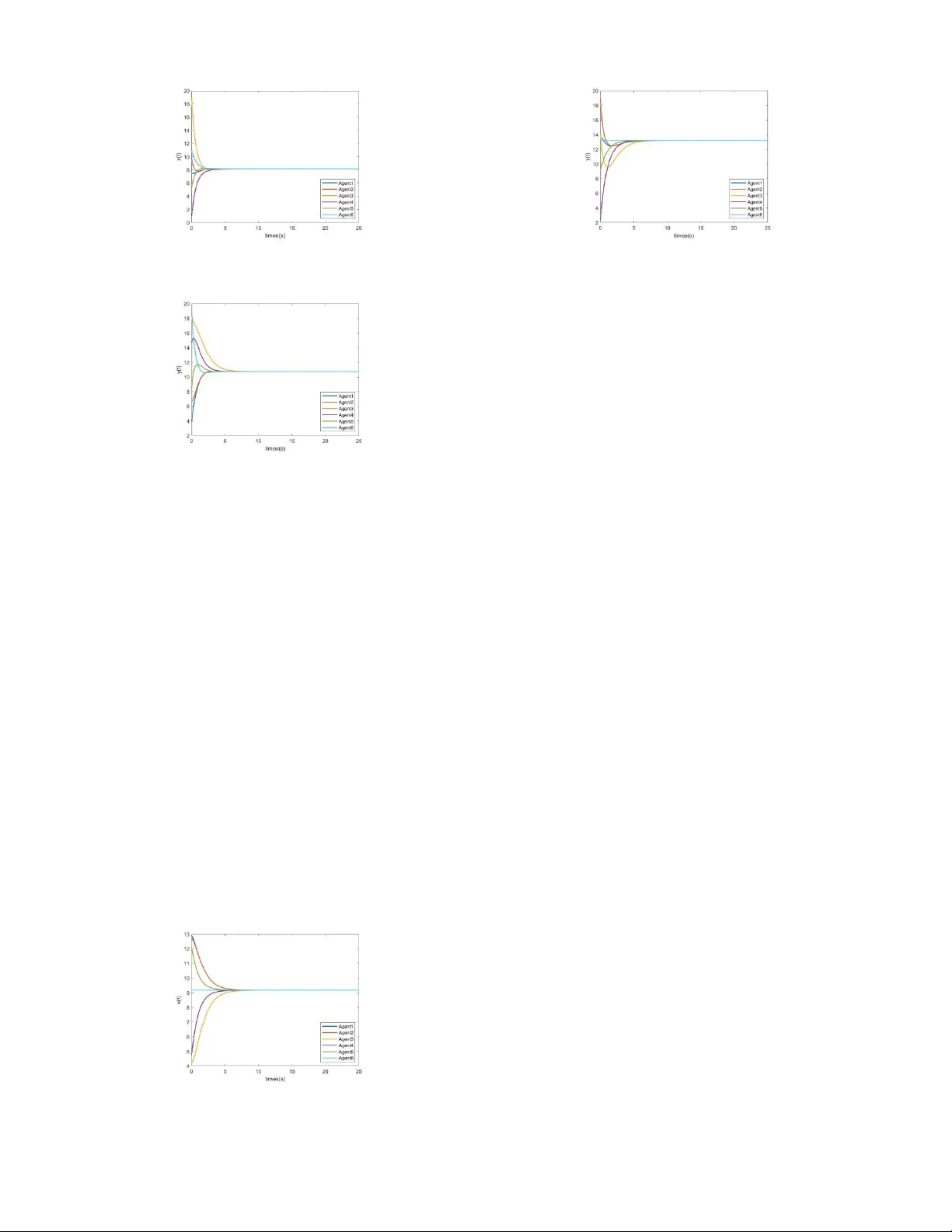
Decentralized design of consensus protocols with minimal communication links based on directed spanning tree Y angzhou Chen, Lanhao Zhao College of Artificial Intelligence and Automation, Beijing Uni versity of T echnology Engineering Research Center of Digital Community , Ministry of Education Beijing, China E-mail: yzchen@bjut.edu.cn, zhaolanhao@emails.bjut.edu.cn. Abstract —This paper proposes a decentralized design ap- proach of consensus protocols of multi-agent systems (MASs) via a directed-spanning-tr ee(DST)-based linear transf ormation and the corresponding minimal communication links. First, the consensus pr oblem of multi-agent systems is transformed into the decentralized output stabilization problem by constructing a linear transformation based on a DST of the communication topology , and thus a necessary and sufficient consensus criterion in terms of decentralized fixed mode (DFM) is derived. Next, a new distrib uted protocol is designed by using only the neighbors’ information on the DST , which is a fully decentralized design approach. Finally , some numerical examples are given to verify the results attained. Index T erms —Consensus, multi-agent system, decentralized output feedback stabilization, decentralized fixed mode, minimal communication links I . I N T RO D U C T I O N W ith the de velopment of information technology , especially network technology , the MAS has been paid more and more attention in recent years. V arious cooperative control problems such as consensus [1], controllability [2], and stabilization [3] hav e been studied. Especially , the consensus design methods hav e been widely used such as [4]–[6] et al. Despite the fruitful results that hav e been obtained, two ke y issues require further attention. One is to find decentralized design approaches for the distributed consensus protocols, and the other is to minimize the amount of communication between agents. For example, communicating with all neigh- bors at the same time generates a large amount of data and may cause congestion. T wo ways are adopted to reduce the amount of communication data: one is to adopt discontinuous communication, and the other is to communicate with as few neighbors as possible. For discontinuous communication, the ev ent-triggering mechanism has been proposed [8] and several results have been obtained such as [9]. In comparison, there is less work to reduce the amount of communication data by reducing the number of communication neighbors. Obviously , the less neighbor information used in the pro- tocol, the less the amount of communication data, and the This work is supported by Beijing Natural Science Foundation (4232041) and National Natural Science Foundation (NNSF) of China under Grant 62273014. higher the reliability of communication. As well-kno wn, the existence of a DST in a fix ed communication topology is a necessary condition for MAS achieving consensus [7]. This implies that the communication based on a DST possesses the minimum number of communication links. This fact motiv ates us to propose a protocol design approach using only DST - based communication. On the other hand, in existing literature, despite the fact that the structure of consensus protocols is expressed in distributed form, the parameters in the protocols are generally determined by centralized design procedures, or they are limited to specific ranges for obtaining decentralized design procedures. For instance, the same control gain matri- ces and e ven the scalars are required for all the agents for ease of adjustment, which greatly reduces the freedom of parameter selection. Therefore, it is of great practical significance to seek no vel approaches to consensus protocol design directly in a decentralized way . Different from the traditional approach of con verting the consensus problem into a stability problem by taking the state error , the linear transformation method [10]–[12] is proposed to transform the consensus problem of multi-agent systems into the decentralized output stabilization problem. For example, a new consensus condition can be deriv ed in terms of the concept of DFM in the decentralized output stabilization problem, and a fully decentralized design approach can be proposed for finding the dif ferent gain ma- trices. This paper studies the consensus problem of multi-agent systems based on the linear transformation method. First, by constructing a DST -based linear transformation, the consensus problem of multi-agent systems is transformed into the de- centralized output stabilization problem. Next, using only the neighbor information of the agent on the DST , rather than all the neighboring agents, a ne w distrib uted protocol is designed and prov ed that the system can reach state consensus. Finally , some numerical examples are gi ven to verify the results. The rest of this paper is organized as follows. Section 2 presents the problem description and transformation based on a DST -based linear transformation. Section 3 provides a fully decentralized protocol design method that uses minimal communication links. Simulations illustrate the validity of the theoretical results in Section 4. Finally , Section 5 summarizes the results attained. I I . P RO B L E M D E S C R I P T I O N A N D T R A N S F O R M A T I O N In this section, we first give a description of the state consensus problem for the MAS and use a DST -based linear transformation to equiv alently transform the consensus prob- lem into a corresponding decentralized output stabilization problem. Based on this, a necessary and suf ficient condition for the MAS to reach state consensus is attained by using the concept of the DFM in decentralized output-feedback stabilization theory . Consider a general linear MAS, where the dynamics of each agent is ˙ x i = Ax i + B u i , i = 1 , · · · , N , x i ∈ R n , u i ∈ R m (1) Suppose that the communication relationship between agents is described by a weighted directed graph G = ( V , E , W ) , where V = { 1 , 2 , · · · , N } , E ⊆ { ( j, i ) : i, j ∈ V } . ( j, i ) ∈ E indicates that the agent j can transfer information to the agent i , or that the agent j is the neighbor of the agent i . W e use N i to represent the collection of all neighbors of agent i . W = [ w ij ] ∈ R N × N + is the adjacency weight matrix, where w ij ≥ 0 , and w ij > 0 if and only if ( j, i ) ∈ E . Under the above communication topology , the agent i can obtain the follo wing information (either directly by measuring the relativ e state x j − x i through the agent i , or by trans- ferring information from agent j to the agent i through the communication network) z j i = w ij ( x j − x i ) , j ∈ N i (2) or a combination of this information z i = X j ∈ N i z j i = X j ∈ N i w ij ( x j − x i ) (3) Therefore, the problem of distrib uted state consensus protocol design can be described as follows: for each agent in (1) a linear feedback control protocol is designed based on its av ailable information (2) or (3) as follows u i = K i z i = K i X j ∈ N i z j i , i = 1 , · · · , N (4) so that the closed-loop system composed of (1) and (4) meets lim t →∞ ∥ x i ( t ) − x j ( t ) ∥ = 0 ∀ i, j ∈ { 1 , · · · , N } , ∀ x i (0) , x j (0) ∈ R n (5) If the gain matrices K i ∈ R m × n exist, the MAS (1) is said to achiev e asymptotically state consensus under the control protocol (4) with the communication topology G . For any agent i ∈ V and its neighbor j ∈ N i , we call x j i = x j − x i the edge state of the directed edge ( j, i ) ∈ E . Thus, the edge state system is represented as ˙ x j i = Ax j i + B u j − B u i , i ∈ V , j ∈ N i (6) It is assumed that the communication topology G = ( V , E , W ) has a DST T = ( V , E T ) , and for the con venience of expres- sion, it is assumed that the vertex N is the root node, and each non-root node i ∈ { 1 , 2 , · · · , N − 1 } has only one parent node k i , that is e i := ( k i , i ) ∈ E T , i = 1 , · · · , N − 1 . W e call e i , i = 1 , · · · , N − 1 , the fundamental edges corresponding to the DST T . The edge state y i := x k i − x i i = 1 , · · · , N − 1 , corresponding to the fundamental edge e i are called the fundamental edge state based on the DST , and thus y = y T 1 , · · · , y T N − 1 T is the fundamental edge state vector . Lemma 1: Any edge state x j i , i ∈ V , j ∈ N i can be linearly represented by the fundamental edge states y i = x k i − x i , i = 1 , · · · , N − 1 on the DST . Pr oof: As we know , any two v ertices i, j have a com- mon grandparent node (such as the root node N ) in T . Consider the grandparent node k with two shortest paths, say , ( k , l 1 ) , ( l 1 , l 2 ) · · · , ( l α , i ) and ( k , m 1 ) , ( m 1 , m 2 ) · · · , ( m β , j ) respectiv ely , then x j i = ( x k − x i ) − ( x k − x j ) = x kl 1 + x l 1 l 2 + · · · + x l α i − x km 1 − x m 1 m 2 − · · · − x m β j =: ( γ j i ⊗ I n ) y (7) where γ j i is the N − 1 dimensional row vector with compo- nents in {− 1 , 0 , 1 } . The Proof is completed. Therefore, instead of the complete edge dynamic system (6), it is only necessary to consider the following fundamental edge state system (assume N to be the root node) ˙ y i = Ay i − B u i + B u k i , i = 1 , · · · , N − 1 (8) W e construct matrix Γ i = γ T 1 i · · · γ T N i T ∈ R N × ( N − 1) , where the ro w vector γ j i is given by (7) when j ∈ N i , and addedly define γ j i = 0 when j / ∈ N i . It can be seen that the matrix Γ i represents the information flow relationship that can be obtained by the agent i corresponding to the DST T , which is called the information flow matrix of the agent i with respect to the DST . Let P 0 = [ p ij ] ∈ R N × ( N − 1) be the incidence matrix corresponding to the DST T , and its entries are defined as p ij = 1 , Node i is the starting point of edge j (out-edge) − 1 , Node i is the end point of edge j (in-edge) 0 , Node i is not associated with edge j If the agents are renumbered appropriately , it can be as- sumed that the parent node k i of each non-root node i ∈ { 1 , 2 , · · · , N − 1 } satisfies k i > i , that is, P 0 is a lower triangular matrix with diagonal element − 1 , element 1 in ( k i , i ) and zero in all other entries. Thus, transpose of the incidence matrix P 0 P T 0 =: p 1 · · · p N ∈ R ( N − 1) × N (9) is the upper triangular matrix, where the N − 1 dimension col- umn vector p i = [ p i 1 , · · · , p i,N − 1 ] T represents the association relationship between the node i and all fundamental edges: p ii = − 1 implies that the fundamental edge e i = ( k i , i ) is the in-edge of the verte x i ; for j ∈ { 1 , 2 , · · · , N − 1 }\{ i } , the fundamental edge e j is an out-edge of vertex i if p ij = 1 ; and the fundamental edge e j is not associated with the vertex i if p ij = 0 . Now the fundamental edge state system (8) can be written as a centralized system ˙ y = ( I N − 1 ⊗ A ) y + N X i =1 ( p i ⊗ B ) u i (10) Furthermore, letting w i = w i 1 · · · w iN ∈ R 1 × N be the ith ro w vector of the adjacency matrix W = [ w ij ] , the information (3) is expressed as z i = X j ∈ N i z j i = X j ∈ N i w ij ( x j − x i ) = ( w i Γ i ⊗ I n ) y (11) It can be seen that the state consensus problem of MAS (1) under the control protocol (4) is equiv alent to the problem of decentralized output-feedback stabilization problem: design decentralized output-feedback control based on measured out- put (11) for system (10) u i = K i z i , i = 1 , · · · , N (12) to make the closed-loop system ˙ y = " I N − 1 ⊗ A + N X i =1 ( p i w i Γ i ⊗ B K i ) # y (13) is asymptotically stable. F or the con venience of e xpression, the system (13) can be simply expressed as ( C ∗ , A ∗ , B ∗ ) , i.e., ˙ y = A ∗ y + B ∗ u z = C ∗ y (14) where A ∗ = I N − 1 ⊗ A, B ∗ = [ B 1 , · · · , B N ] = P T 0 ⊗ B C ∗ = C T 1 , · · · , C T N T , B i = p i ⊗ B , C i = w i Γ i ⊗ I n , i = 1 , · · · , N The centralized form of control (12) is expressed as u = K D z , K D ∈ K D K D := { K D = diag ( K 1 , · · · , K N ) : K i ∈ R m × n , i = 1 , · · · , N (15) So the system matrix of the closed-loop system (13) is I N − 1 ⊗ A + N X i =1 ( p i w i Γ i ⊗ B K i ) = I N − 1 ⊗ A + N X i =1 B i K i C i = A ∗ + B ∗ K D C ∗ (16) It is well kno wn that the results of decentralized output stabilization are closely related to DFMs. Next, we introduce the concept of DFM to analyze the stability of the system (13). Definition 1: The set of decentralized fixed modes for system ( C ∗ , A ∗ , B ∗ ) with the block diagonal feedback gain matrix set K D in (15) is defined as Λ ( C ∗ , A ∗ , B ∗ ; K D ) = S K ∈ K D σ ( A ∗ + B ∗ K C ∗ ) where σ ( A ∗ + B ∗ K C ∗ ) denotes the set of eigen values of matrix A ∗ + B ∗ K C ∗ . The follo wing lemma can be established from Definition 1. Lemma 2: MAS (1) under protocol (4) can asymptotically achiev e state consensus if and only if the DFMs of system (14) does not contain the one in { λ : λ ∈ σ ( A ∗ ) , Re λ ≥ 0 } . According to [13] and Lemma 2, a sufficient and neces- sary condition for MAS to achie ve state consensus has been obtained in [12]. Theor em 1: MAS(1) under protocol (4) can asymptotically achiev e state consensus if and only if rank I N − 1 ⊗ ( λ 0 I − A ) P α ⊗ B Φ β ⊗ I n 0 ≥ ( N − 1) n for any λ 0 ∈ { λ : λ ∈ σ ( A ) , Re λ ≥ 0 } and any bipartite segmentation ( α, β ) of the verte x set V , where P α = [ p i 1 , . . . , p i k ] , Φ β = w i k +1 Γ i k +1 . . . w i N Γ i N Next, we will discuss a fully decentralized design of the distributed consensus protocol by using only some but not all of the neighbor information. I I I . D E C E N T R A L I Z E D C O N S E N S U S P RO TO C O L D E S I G N V I A M I N I M A L C O M M U N I C AT I O N L I N K S In this section, we propose a fully decentralized design approach for the consensus protocol of MAS (1). Precisely , instead of the control protocol (12) where the information of all neighbors of each agent is used, we show that, due to the unique role the DST plays in the consensus process, consensus can also be reached by using only the information that an agent obtains from their neighbors on the DST . For the con venience of discussion, we distinguish between two cases: 1) the root node of the DST is also a root vertex in the original communication topology; 2) the root node of the DST is not a root vertex in the original communication topology . Under the assumption that there is a DST T = ( V , E T , W T ) , if the control protocol of each agent only uses the neighbor information on the DST , the information flow matrix Γ N = 0 , and for i ∈ { 1 , 2 , · · · , N − 1 } only the ith element of the vector in Γ i is 1, and the other vectors are 0, i.e. w i Γ i = 0 · · · 0 w i,k i 0 · · · 0 . Thus, the control (12) becomes u N = 0 u i = K i w i,k i y i , i = 1 , · · · , N − 1 (17) Theor em 2: Suppose the root node N of the DST T is a root v ertex in the communication topology G . If the control gain matrix K i , i = 1 , 2 , · · · , N − 1 in (17) are selected such that A − w ik i B K i , i = 1 , 2 , · · · , N − 1 are Hurwitz, then MAS (1) asymptotically achiev es state consensus under the control protocol (17). Pr oof: Set p ij as the j th row element of the vector p i , Γ ik is the k th column vector of the matrix Γ i , thus we hav e p i w i Γ i = [ p ij w i Γ ik ] N − 1 j,k =1 . Noting that p ij = − 1 , p k j j = 1 , p ij = 0 for the rest i ; and w i Γ ik i = w i,k i , w i Γ ik = 0 for the rest k , then (13) can be expressed in the form ˙ y j = Ay j + N X i =1 N − 1 X k =1 ( p ij w i Γ ik ) B K i y k = A − w j k j B K j y j + w k j κ ( k j ) B K k j y k j (18) where κ ( k j ) represents the parent node of the node k j on the DST and j = 1 , · · · , N − 1 . Since it is assumed that k j > j for j ∈ { 1 , 2 , · · · , N − 1 } , the system matrix of (13) is an upper triangular block matrix according to (18), and A − w j k j B K j , j = 1 , 2 , · · · , N − 1 is the block matrix on the diagonal. So MAS (1) asymptotically achiev e state consensus under the control protocol (17) if the control gain matrix K i , i = 1 , 2 , · · · , N − 1 are selected such that A − w ik i B K i , i = 1 , 2 , · · · , N − 1 is Hurwitz. The Proof is completed. Next, we deal with the general case where the root node N of the DST is not a root vertex in the original communication topology . Let n l ∈ { 1 , 2 , · · · , N − 1 } be one of the neighbors of root node N in the original communication topology , and ( N , n 1 ) , ( n 1 , n 2 ) · · · , ( n l − 1 , n l ) be the shortest path from N to n l on the DST . Then any edge state can be linearly repre- sented by the fundamental edge states according to Lemma 1, so we have w N ,n l ( x N − x n l ) = w N ,n l ( y n 1 + y n 2 + · · · + y n l ) (19) Thus we can design the follo wing control protocol u N = K N w N i n l ( y n 1 + y n 2 + · · · + y n l ) u i = K i w i,k i y i , i = 1 , · · · , N − 1 (20) Suppose α is a ro w block matrix with blocks − w N ,n l B K N at the columns n 1 , · · · , n l and zero at the other columns and β i is row block matrix with blocks w k k , ( k 1 ) B K k 1 at the columns k i and zero at the other columns. Suppose there are p − 1 nodes whose parent node on DST is N . Without loss of generality , let k i = N for i = 1 , · · · , N − p and k i = N for i = N − p + 1 , · · · , N − 1 . Thus, in this case, we have A ∗ + B ∗ K D C ∗ = Φ + β ∗ α ∗ + Q (21) where Φ := diag { A − w ii i B K i , i = 1 , · · · , N − p } Ψ = diag { A − w iN B K i , i = N − p + 1 , · · · , N − 1 } Q = 0 np × n ( N − p − 1) Ψ β ∗ := β . . . β N − 1 − p , α ∗ := α . . . α there are p blocks Obviously , when all eigen values of the matrix in (21) are located in the left half plane, MAS (1) asymptotically achiev es state consensus under the control protocol (19). Howe ver , the size of the eigenv alues of matrix (21) belongs to the global information, and we e xpect to use only local information to obtain criteria. Next, we use Gerschgorlin circle theorem [14] to deal with this problem. For any matrix A = [ a ij ] ∈ C m × n , we denote that ∥ A ∥ = max 1 ≤ i ≤ m n X j =1 | a ij | , A − 1 − 1 = min 1 ≤ i ≤ m n X j =1 | a ij | Then we can get the follo wing results. Theor em 3: Suppose the root node N of the DST is not a root vertex in the original communication topology and let n l ∈ { 1 , 2 , · · · , N − 1 } be one of its neighbors and λ are the eigen values to be estimated of matrix (21). If for p − 1 nodes whose parent node on DST is N , the gain matrices K i , i = N − p + 1 , ..., N in (20) are selected such that the following Gerschgorlin circles ( A − w iN B K i − λI n ) − 1 − 1 ≦ l X m =1 ∥− w N ,n m B K N ∥ (22) are all located in the left half plane, and for the remaining N − p nodes, the gain matrices K i , i = 1 , 2 , ..., N − p in (20) are selected such that the follo wing Gerschgorlin circles ( A − w ik i B K i − λI n ) − 1 − 1 ≦ w k i κ ( k i ) B K k i (23) are all located in the left half plane, then MAS (1) asymp- totically achie ves state consensus under the control protocol (19). Pr oof: W e note that the matrix (21) is a block matrix, so the Gerschgorlin circles can be denoted as (22) and (23) according to the Gerschgorlin circle theorem of block matrix [14], and we note that for each individual, we can design its feedback gain matrix and the neighbor’ s (on the DST) feedback gain matrix instead of designing all the gain matrices at the same time to adjust the position of the corresponding Gerschgorlin circle so that it is located in the left half plane. And as long as all Gerschgorlin circles are located in the left half plane, all eigen values of the matrix are also located in the left half plane. So we can show that the matrix (21) is Hurwitz if the control gain matrix K i , i = 1 , 2 , · · · , N satisfies the conditions in Theorem 3, and thus MAS (1) asymptotically achiev es state consensus under the control protocol (19). The proof is completed. W e will further show the selection method in Example 2 in Section 4. Theorems 2 and 3 show that MAS(1) can achie ve state con- sensus even when designing a distributed protocol using only some neighbor information instead of all neighbor information. This greatly reduces the computation amount of the agents and the required communication load. It is worth noting that not only the protocol is distributed, but also its design procedure is fully decentralized and each agent may hav e a different feedback gain matrix. Ho wev er , in most of the literature, all the agents adopt the same feedback gain matrix. I V . N U M E R I C A L E X A M P L E S This section presents some numerical examples to verify the validity of the proposed theoretical results. Fig. 1. The communication topology of Example 1 Fig. 2. The first components of the states Example 1. Consider a MAS consisting of four agents. The dynamics of each agent is described by ˙ x i = 0 1 − 1 0 x i + 1 1 u i The communication topology of the four agents is shown in Figure 1, and its adjacency matrix is W = 0 1 1 0 1 0 1 0 0 0 0 1 0 0 0 0 Obviously , it has a DST with fundamental edges (4 , 3)(3 , 2)(3 , 1) and verte x 4 is a root node, w 3 k 3 = w 34 = 1 , w 2 k 2 = w 23 = 1 , w 1 k 1 = w 13 = 1 W e select K 1 = 1 . 5 0 . 5 , K 2 = 4 0 , K 3 = 2 . 625 0 . 375 Such that A − B K 1 , A − B K 2 , A − B K 3 are Hurwitz. Figure 2 and Figure 3 show the states of the consensus procedure with initial states x 10 = 7 . 5 , y 10 = 13 . 8 , x 20 = 14 , y 20 = 9 , x 30 = 0 , y 30 = 6 . 5 , x 40 = 8 , y 40 = 5 . 4 . A more general example as follows which the root node of DST can receive neighbor information Example 2. Consider a MAS consisting of six agents, and the dynamics of each agent is ˙ x i = 0 1 − 1 0 x i + 1 1 u i The communication topology of the agents is sho wn in Figure 4 Obviously , it has a DST with fundamental edges (6 , 5)(6 , 4)(4 , 3)(5 , 2)(5 , 1) , where vertex 6 is the root node, and w 5 k 5 = w 56 = 1 , w 4 k 4 = w 46 = 1 , w 3 k 3 = w 34 = 1 , Fig. 3. The second components of the states Fig. 4. The communication topology of Example 2. w 2 k 2 = w 25 = 1 , w 1 k 1 = w 15 = 1 . Furthermore, vertex 6 is not the root node in the original communication topology and it has a neighbor 1 with w 61 = 1 . In this case, the matrix in (21) is expressed as A − B K 1 0 0 0 B K 5 0 A − B K 2 0 0 B K 5 0 0 A − B K 3 B K 4 0 − B K 6 0 0 A − B K 4 − B K 6 − B K 6 0 0 0 A − B K 5 − B K 6 According to the conditions in Theorem 3, the following Gerschgorin circles all should be located in the left half-plane ( A − B K i − λI n ) − 1 − 1 ≦ ∥ B K k 1 ∥ , i = 1 , 2 , 3 ( A − B K 4 − λI n ) − 1 − 1 ≦ 2 ∗ ∥− B K 6 ∥ ( A − B K 5 − B K 6 − λI n ) − 1 − 1 ≦ ∥− B K 6 ∥ Next, we show the steps to design the feedback gain matrix separately for each indi vidual compared with the case where the feedback gain matrices are the same. At first, we select the feedback gain matrix of node N K 6 = 1 0 Then we can select K 4 , K 5 to make the Gerschgorin circle lie in the left half plane. ( A − B K 5 − B K 6 − λI n ) − 1 − 1 ≦ 1 ( A − B K 4 − λI n ) − 1 − 1 ≦ 2 Next, the same method can be used to obtain K 1 , K 2 , K 3 In this example, we select K 1 = [4 0] , K 2 = [2 . 625 0 . 375] , K 3 = [2 . 5 0 . 5] , K 4 = [2 . 5 0 . 5] , K 5 = [1 . 5 0 . 5] , K 6 = [1 0] . Fig. 5. The first components of the states Fig. 6. The second components of the states Figure 5 and Figure 6 show the states of the consensus procedure with initial states x 10 = 7 . 8 , y 10 = 4 , x 20 = 10 , y 20 = 7 , x 30 = 19 , y 30 = 18 , x 40 = 1 , y 40 = 15 , x 50 = 5 . 5 , y 50 = 8 . 2 x 60 = 11 , y 60 = 19 If we select K 6 = 0 and let K i , i = 1 , 2 , 3 , 4 , 5 keep unchanged, we can get the consensus procedure is shown in Figure 7 and Figure 8 with initial states x 10 = 13 , y 10 = 13 . 5 , x 20 = 12 . 8 , y 20 = 19 , x 30 = 4 . 2 , y 30 = 14 , x 40 = 4 . 8 , y 40 = 2 , x 50 = 12 , y 50 = 9 , x 60 = 9 . 1 , y 60 = 13 . It can be seen from the simulations above that other agents achiev e the tracking of the root node actually when the root node does not receiv e neighbor information. V . C O N C L U S I O N The consensus problem of MASs based on the DST -based linear transformation method is studied. First, by constructing a DST -based linear transformation, the consensus problem of the multi-agent system is transformed into the decentralized Fig. 7. The first components of the states Fig. 8. The second components of the states output stabilization problem, and a suf ficient and necessary condition for the multi-agent achieving state consensus was obtained by using the concept of DFM. Based on this, a fully decentralized design procedure of the distrib uted protocols w as proposed by using only the neighbor information of each agent on the DST . W e point out that the proposed method is generic and it can be applied to more comple x consensus problems in future research. R E F E R E N C E S [1] Zhang D W , Liu G P . “Coordinated control of quasilinear multiagent systems via output feedback predictiv e control, ” ISA transactions, 2022, 128: 58-70. [2] Zhao L, Ji Z, Liu Y , et al. “Controllability of general linear discrete mul- tiagent systems with directed and weighted signed networks, ” Journal of Systems Science and Complexity , 2022. https://doi.org/10.1007/s11424- 022-1036-5. [3] Sun Y , Ji Z, Liu Y , et al. “On stabilizability of multi-agent systems, ” Automatica, 2022, 144: 110491. [4] T ang X, Y u J, Dong X, et al. “Distributed consensus tracking control of nonlinear multi-agent systems with dynamic output con- straints and input saturation, ” Journal of the Franklin Institute, 2022. https://doi.org/10.1016/j.jfranklin.2022.11.009. [5] W u Y , Low K H. “Discrete space-based route planning for rotary-wing U A V formation in urban en vironments, ” ISA transactions, 2022,129:243- 259. [6] Pałka P , Olsze wski R, Kesik Brodacka M, et al. “Using multiagent modeling to forecast the spatiotemporal dev elopment of the COVID-19 pandemic in Poland, ” Scientific Reports, 2022, 12(1): 1-18. [7] W . Ren, and R. W . Beard, “Consensus seeking in multiagent systems un- der dynamically changing interaction topologies, ” IEEE T rans. Autom. Control, 2005,50(5):655-661. [8] Dimarogonas D V , Frazzoli E, Johansson K H. “Distributed ev ent- triggered control for multi-agent systems, ” IEEE Transactions on Au- tomatic Control, 2011, 57(5): 1291-1297. [9] Li X, T ang Y , Karimi H R. “Consensus of multi-agent systems via fully distributed event-triggered control, ” Automatica, 2020, 116: 108898. [10] Chen Y , Qu X, Dai G, et al. “Linear-transformation-based analysis and design of state consensus for multi-agent systems with state observers, ” Journal of the Franklin Institute, 2015, 352(9): 3447-3457. [11] Chen Y , Chen B, Zhan J. “Decentralized consensus criteria of linear multiagent systems via directed-spanning-tree-based linear transforma- tion, ”Chinese Automation Congress (CAC). IEEE, 2019: 5350-5354. [12] Chen Y , Zhan J, Huang X. “Distributed consensus of linear multi-agent systems via decentralized output feedback control approach, ”Chinese Control and Decision Conference (CCDC). IEEE, 2021: 5297-5302. [13] B. D. O. Anderson, and D. J. Clements, “ Algebraic characterization of fixed modes in decentralized control, ” Automatica,17(5), 703-712, 1981. [14] Feingold D G,V arg a R S.“Block diagonally dominant matrices and generalizations of the Gerschgorin circle theorem, ”Pacific J Math,1962,(12):1241-1250.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment