Attribution Upsampling should Redistribute, Not Interpolate
Attribution methods in explainable AI rely on upsampling techniques that were designed for natural images, not saliency maps. Standard bilinear and bicubic interpolation systematically corrupts attribution signals through aliasing, ringing, and bound…
Authors: Vincenzo Buono, Peyman Sheikholharam Mashhadi, Mahmoud Rahat
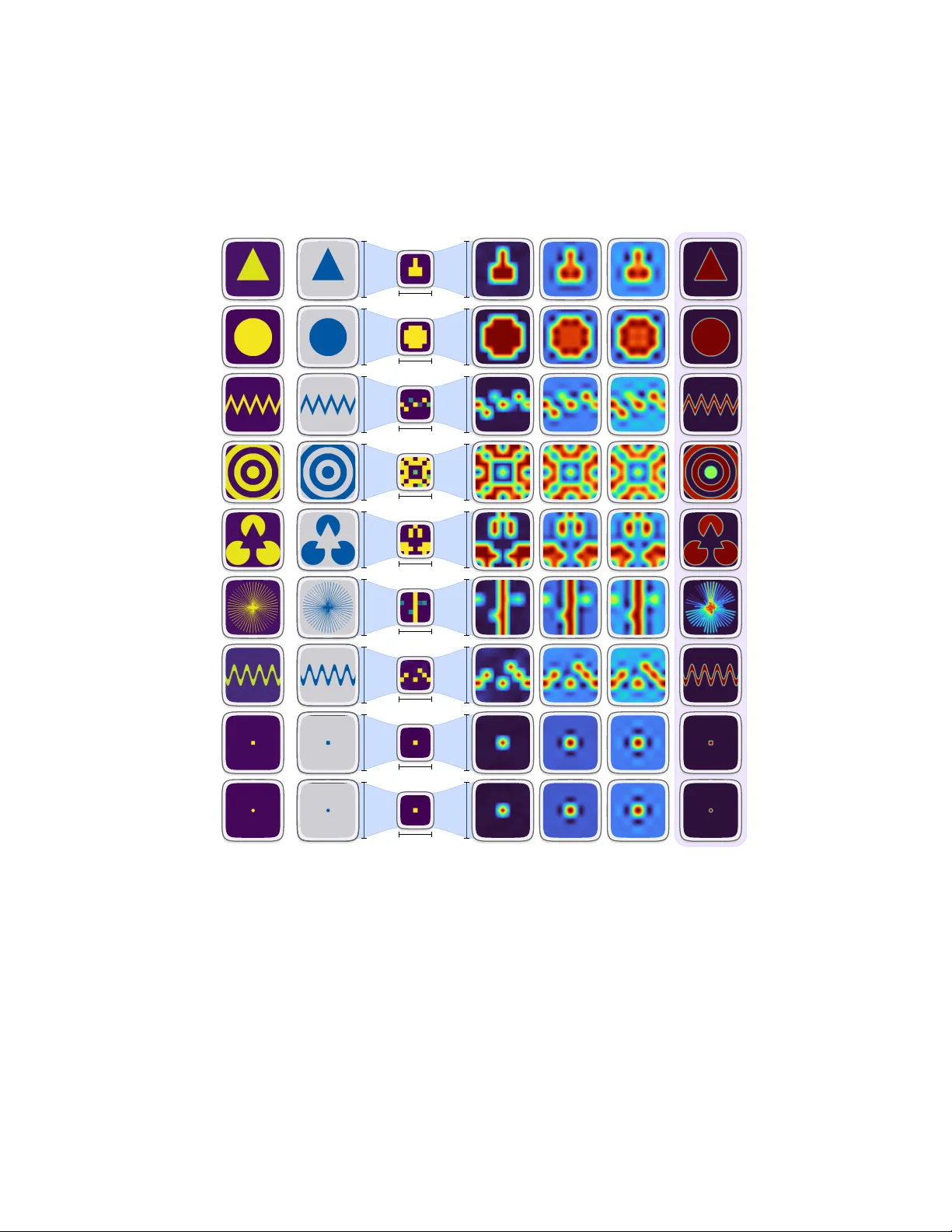
A ttribution Upsampling should Redistribute, Not In terp olate Vincenzo Buono 1 , P eyman Sheikholharam Mashhadi 1 , Mahmoud Rahat 1 , Pra yag Tiw ari 1 , and Stefan Byttner 1 Halmstad U niversit y , Halmstad, Sweden {vincenzo.buono, peyman.mashhadi, mahmoud.rahat, prayag.tiwari, stefan.byttner}@hh.se Abstract. A ttribution metho ds in explainable AI rely on upsampling tec hniques that w ere designed for natural images, not saliency maps. Standard bilinear and bicubic interpolation systematically corrupts attri- bution signals through aliasing, ringing, and b oundary bleeding, pro duc- ing spurious high-imp ortance regions that misrepresent mo del reasoning. W e iden tify that the core issue is treating attribution upsampling as an interp olation problem that operates in isolation from the mo del’s reason- ing, rather than a mass r e distribution problem where model-derived se- man tic b oundaries must gov ern how imp ortance flows. W e present Uni- v ersal Seman tic-A w are Upsampling (USU) , a principled metho d that reformulates upsampling through ratio-form mass redistribution op- erators, prov ably preserving attribution mass and relative imp ortance ordering. Extending the axiomatic tradition of feature attribution to upsampling, w e formalize four desiderata for faithful upsampling and pro ve that interpolation structurally violates three of them. These same three force any redistribution op erator in to a ratio form; the fourth se- lects the unique p oten tial within this family , yielding USU. Controlled exp erimen ts on mo dels with kno wn attribution priors verify USU’s for- mal guarantees; ev aluation across ImageNet, CIF AR-10, and CUB-200 confirms consistent faithfulness impro vemen ts and qualitativ ely sup erior, seman tically coheren t explanations. Keyw ords: Explainable AI · F eature Attribution · Saliency Map Up- sampling In terp olation reconstructs a con tinuous signal. The resulting artifacts distort what practitioners se e and corrupt what faithfulness metrics me asur e . USU r e distributes mass according to prediction relev ance: the unique op erator sat- isfying conserv ation, monotonicity , score-in v ariance, and locality . 1 In tro duction Neural net works are increasingly deploy ed in safety-critical vision applications, from medical imaging to autonomous driving. Understanding their decisions 2 V. Buono et al. Mas Redistribution A daptiv Mixin Co ecien t ... ... ... F used A ttribution Emergen t Boundaries Biline ar Bilinear Bicubic USU-IWMR USU-I WMR Fig. 1: USU replaces interpolation with semantically guided mass redistri- bution. L eft: The pipeline decomp oses upsampling into score-potential computation, emergen t boundary detection, and ratio-form mass redistribution. Right: Standard in- terp olation (bilinear, bicubic) bleeds attribution across ob ject b oundaries; USU-IWMR pro duces sharp, seman tically coheren t saliency maps that faithfully reflect model rea- soning. has b ecome a prerequisite for deplo yment. F eature attribution methods suc h as Grad-CAM [ 54 ], In tegrated Gradien ts [ 61 ], SHAP [ 35 ], La yer-wise Relev ance Propagation [ 43 ], and RISE [ 46 ] hav e b ecome the standard to ols for this purp ose, pro ducing imp ortance maps that highligh t whic h input regions drive a predic- tion. These metho ds universally pro duce coarse-resolution maps that must b e upsampled to input resolution before in terpretation. This ubiquitous upsam- pling step has b een treated as a solv ed problem. W e show it is not: standard upsampling tec hniques systematic al ly c orrupt the explanations they pro duce. Standard interpolation metho ds such as bilinear and bicubic upsampling were designed to reconstruct natural images [ 29 , 42 ]. They were never in tended for ex- plainabilit y . Attribution maps demand fundamentally different prop erties: im- p ortanc e mass must b e conserv ed so the explanation accounts for the full pre- diction, redistribution must follow the model’s own semantic structur e rather than spatial co ordinates, and upsampled attributions must remain sp atial ly lo- c al , ensuring the fine-grained explanation remains faithful to the original coarse attribution. Standard in terp olation violates all three. This mismatch manifests as concrete artifacts that corrupt explanation fi- delit y (Figure 2 ). Aliasing causes semantic boundaries to b e incorrectly smo othed; A ttribution Upsampling should Redistribute, Not In terp olate 3 Fig. 2: Upsampling corrupts saliency maps through reconstruction errors. Classical saliency upsampling kernels can introduce reconstruction errors, l eading to incorrect visual explanations. RRL-constrained [ 50 ] mo del on synthetic shap es; see the supplemen tal material for setup and extended results. ringing artifacts from bicubic in terp olation’s negative weigh ts create spurious high-attribution regions; boundary bleeding allo ws attribution to leak across se- man tic boundaries. These artifacts distort what practitioners see and c orrupt what faithfulness metrics measure. The fundamental issue is that interp olation op erates in isolation from the mo del’s reasoning, treating all spatial locations as in terchangeable regardless of their imp ortance to the prediction. The resulting explanation is faithful to neither the mo del’s reasoning nor the coarse attribution it was mean t to refine. As Figure 3 shows, three samples with en tirely different shap es and ground-truth importance regions yield identical upsampled explana- tions: interpolation cannot distinguish what the mo del attends to from what it ignores. W e formalize four desiderata that an y faithful upsampling op erator m ust satisfy: neighbourho od completeness (D1), segment monotonicit y (D2), constant conditioning strength (D3), and lo calit y (D4). These extend the axiomatic foun- dations of feature attribution theory [ 5 , 60 , 61 ] to the upsampling domain. W e pro ve that widely adopted in terpolation methods such as bilinear and bicubic upsampling violate (D1), (D2), and (D4), corrupting attribution signals and breaking faithfulness. Their kernel support crosses neighbourho od b ound- aries, leaking mass; their w eights dep end on geometry rather than semantics; and b oundary pixels dep end on adjacent neighbourho o ds. W e derive the Univer- sal Seman tic-A w are Upsampling (USU) op erator as the unique ratio-form 4 V. Buono et al. solution satisfying all four desiderata, with uniqueness follo wing from Luce’s Choice Axiom [ 6 ]: the Indep endence of Irrelev ant Alternativ es forces any mass- conserving, monotone, lo cal redistribution op erator into the ratio form. A tem- p erature parameter controls redistribution sharpness. W e also in tro duce Soft IWMR , a v ariant that inten tionally relaxes (D1) to allow mass flow b etw een neigh b ourho ods based on global importance, useful when coarse attributions con tain systematic biases. Whereas prior work has treated attribution upsampling as a solved implemen- tation detail, we provide the first formal treatment, from axiomatic characteri- zation through structural incompatibility results to a pro v ably unique solution. Sp ecifically: 1. Axiomatic F ramew ork. W e formalize four desiderata (D1)–(D4) for faith- ful attribution upsampling, extending the axiomatic tradition of feature at- tribution theory . W e pro ve that bilinear and bicubic in terp olation struc- turally violate three of these desiderata (D1), (D2), (D4), establishing that in terp olation-based upsampling is fundamentally unsuitable for attribution maps. 2. USU Op erator. W e derive Universal Seman tic-A ware Upsampling as the unique ratio-form op erator satisfying all four desiderata, with uniqueness fol- lo wing from Luce’s Indep endence of Irrelev ant Alternativ es. A temp erature parameter controls redistribution sharpness, and the Soft IWMR v ariant re- laxes strict mass conserv ation when coarse attributions contain systematic biases. 3. Empirical V alidation. W e first v erify USU’s formal guaran tees on con- strained mo dels whe re ground-truth attributions are kno wn, achieving 2–4 orders of magnitude impro vemen t in Infidelity . W e then confirm these guar- an tees transfer to real-world settings: ev aluations across ImageNet, CIF AR- 10, and CUB-200 with three architectures (V GG16, ResNet50, ViT-B-16) demonstrate consistent faithfulness impro v ements across div erse quantita- tiv e metrics and qualitatively superior, semantically coheren t explanations. 2 Related W ork 2.1 Spatial Resolution in F eature A ttribution The attribution ecosystem spans div erse metho dological families with mark edly differen t nativ e resolutions [ 24 ]. The most widely deploy ed family , CAM and its v ariants [ 8 , 14 , 54 , 67 , 69 ], operates on final conv olutional feature maps (t ypically 7 × 7 or 14 × 14 ) and upsamples via bilinear interpolation. Vision T ransformer in terpretability metho ds [ 1 , 9 , 10 ] face an analogous constrain t, pro ducing patch- lev el attributions that m ust b e tiled or interpolated to pixel resolution. Black- b o x approaches such as RISE [ 46 ] use coarse random masks, while LIME [ 48 ] and SHAP [ 35 ] t ypically op erate on superpixel features. Ev en metho ds that nominally pro duce full-resolution maps encounter the gap in practice: In tegrated Gradien ts [ 61 ], DeepLIFT [ 55 ], and Lay er-wise Relev ance Propagation [ 43 ] are A ttribution Upsampling should Redistribute, Not In terp olate 5 noisy and often applied to in termediate la yers, while F ullGrad [ 57 ] aggregates m ulti-lay er maps that are individually upsampled. Whether structurally coarse or nominally pixel-level, these methods rely on interpolation designed for image reconstruction when mapping attributions to input resolution. The faithfulness of this upsampling step itself remains unexamined: no prior w ork formalizes what prop erties attribution upsampling must satisfy or whether in terp olation can guaran tee them. 2.2 Saliency Map Refinement The comm unity has recognized the resolution problem and proposed v arious remedies, though all remain heuristic. Multi-layer aggr e gation metho ds (Lay er- CAM [ 27 ], CAMERAS [ 25 ], Poly-CAM [ 15 ]) com bine maps from multiple net- w ork depths but still upsample each lay er via interpolation. Augmentation-b ase d approac hes (Augmen ted Grad-CAM [ 44 ], Jitter-CAM [ 19 ], EVET [ 45 ], Gradual Extrap olation [ 62 ]) break the coarse grid via geometric or net work-la yer trans- formations but provide no formal mass guarantees. Se gment-b ase d metho ds are closest to USU: XRAI [ 28 ] aggregates Integrated Gradients ov er image segmen ts and SA T s [ 22 ] le v erage SAM for semi-global explanations, but neither formally redistributes mass. T aimeskhano v et al . [ 64 ] demonstrate that CAMs can “see through walls,” showing the problem extends deep er than resolution alone. None of these metho ds isolate upsampling as a principled op eration; USU fills this gap as a standalone, axiomatically deriv ed op erator. 2.3 Axiomatic F oundations in Explainability The axiomatic approach has been remark ably successful in uniquely determining attribution metho ds from natural properties. Shapley v alues [ 35 , 70 ] are uniquely c haracterized by efficiency , symmetry , linearity , and the null pla yer axiom, the gold standard of axiomatic explainability . Integrated Gradien ts [ 61 ] admit mul- tiple indep endent axiomatic characterizations via completeness, sensitivity , im- plemen tation in v ariance, and related prop erties [ 36 , 38 ]. Unified decomp osition- and-allo cation frameworks [ 12 , 16 , 17 , 37 , 40 , 63 ] rev eal Shapley and IG as special cases of a common paradigm, and in teraction extensions [ 18 , 26 , 59 ] lift these axioms to higher-order effects. Y et imp ossibilit y results [ 5 ], conflicting opera- tionalizations [ 60 ], and axiom-lev el critiques [ 32 , 33 , 65 ] highlight that axioms constrain but con text matters, motiv ating domain-sp ecific axiomatizations. A key theoretical to ol from outside explainability is Luce’s Choice Axiom [ 6 ], sp ecifically the Indep endence of Irrelev ant Alternatives (I IA), whic h uniquely c haracterizes the exp onential/softmax form in discrete choice theory [ 7 ]. Y et this p o w erful axiomatic program has never b een applied to attribution upsampling. W e extend it, showing that natural desiderata for faithful attribution refinement uniquely determine a ratio-form op erator. 6 V. Buono et al. e ( x ) Ground T ruth 224p x 224p x 7p x e ( x ) Ground T ruth 224p x 224p x 7p x e ( x ) Ground T ruth 224p x 224p x 7p x Sample ( x ) square-50 ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic Sample ( x ) triangle-50 ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic Sample ( x ) circle-50 ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic Fig. 3: Iden tical saliency for distinct inputs. Each ro w shows (left) the input, (middle) the raw heatmap, (right) the upsampled saliency map, and (rightmost) the ground-truth attribution priors. Despite distinct ground truths, the upsampled expla- nations con verge to a single pattern: in terp olation cannot distinguish what the mo del attends to from what it ignores. RRL-constrained [ 50 ] mo del on synthetic shap es; see the supplemental material for setup and extended results. 2.4 F aithfulness Ev aluation Numerous p erturbation-based metrics [ 23 , 46 , 49 , 52 ] and standardized to olk- its [ 2 , 21 , 30 ] ev aluate attribution quality , y et no consensus has emerged: metrics frequen tly disagree [ 4 , 58 ], are sensitive to design c hoices [ 47 ], and can fail even with kno wn ground truth [ 41 ]. A complemen tary strategy constructs mo dels with known attribution priors [ 3 , 11 , 50 , 68 ] so that ground-truth explanations are av ailable b y design. Crucially , existing metrics ev aluate the full attribution pip eline end-to-end, conflating attribution-metho d quality with upsampling fi- delit y . W e adopt b oth strategies: con trolled exp erimen ts isolate the upsampling con tribution, while standard b enc hmarks confirm that b etter upsampling trans- lates to b etter explanations. 3 F rom In terp olation to Redistribution Standard upsampling treats a coarse attribution map as a signal to be smo othly reconstructed. But attribution maps are not images . They carry mass : each neigh b ourho od’s total attribution accounts for the mo del’s reasoning ab out that region. An y upsampling that cr e ates or destr oys that mass distorts the expla- nation it was meant to refine. The question is not “what value b elongs at this A ttribution Upsampling should Redistribute, Not In terp olate 7 pixel?” but “how should this neighb ourho o d’s mass b e al lo c ate d among its pixels?” F ormalizing this yields a complete theory: interpolation prov ably fails three nec- essary requiremen ts (Section 3.2 ), four desiderata c haracterize faithful redistri- bution (Section 3.3 ), and a uniqueness argument forces the solution (Section 3.4 ). Figure 3 illustrates this failure: three distinct inputs yield iden tical upsampled explanations. 3.1 Problem Setup L attic e and p artitions. Let Ω = { 0 , . . . , H − 1 } × { 0 , . . . , W − 1 } denote the pixel lattice . An upsampling neigh b ourho od system N = { N 0 , . . . , N K − 1 } par- titions Ω into K disjoint sets, eac h the receptive field of one coarse attribu- tion v alue; w e write ν : Ω → { 0 , . . . , K − 1 } for the index function ( ν ( x ) = k iff x ∈ N k ). A segmen tation partition S = { S 0 , . . . , S P − 1 } indep enden tly par- titions Ω in to P seman tic segments with index function σ : Ω → { 0 , . . . , P − 1 } . The partition N enco des the sp atial structure of the coarse attribution; S pro- vides the mo del’s semantic structure that guides ho w attribution mass is allo- cated among pixels. A ttribution and mass. A coarse attribution A : Ω → R is piecewise constant on neighbourho ods, A ( x ) = a ν ( x ) . The neigh b ourhoo d mass aggregates attri- bution within eac h neighbourho o d: M k = X x ∈ N k A ( x ) . (1) Segmen t scores s : { 0 , . . . , P − 1 } → [0 , 1] assign normalized imp ortance to eac h segmen t. Giv en the tuple ( A, s, N , S ) , w e seek an upsampling operator pro ducing a fused attribution ˜ A : Ω → R : ˜ A = U ( A, s, N , S ) : Ω → R . (2) Err or mo del. Upsampling quality is captured by tw o complementary error types. The α -error (spurious attribution) and β -error (signal loss) at pixel x relative to ground-truth A ∗ are: α ( x ) = max 0 , | ˜ A ( x ) | − | A ∗ ( x ) | , β ( x ) = max 0 , | A ∗ ( x ) | − | ˜ A ( x ) | . (3) A t each pixel exactly one can be nonzero. 3.2 Wh y In terp olation F ails Before formalizing what faithful redistribution requires, w e establish what it cannot b e: interpolation . Classical k ernels [ 29 , 42 ] optimize for smo oth signal reconstruction, ignoring b oth the attribution mass that must b e conserved and the semantic structur e that encodes prediction relev ance. Three structural violations mak e this incompatibility precise. 8 V. Buono et al. Theorem 1 (Interpolation Violates Mass Conserv ation). Any interp ola- tion kernel whose supp ort extends acr oss neighb ourho o d b oundaries with non-zer o weight violates mass c onservation. Sp e cific al ly, ther e exists a c o arse attribution A such that P x ∈ N k ˜ A ( x ) = M k . Mass leaks across neigh b ourho od boundaries whenev er a k ernel’s support crosses them. F ull proof in the supplemental material. Theorem 2 (Interpolation Ignores Seman tics). Interp olation is sc or e- indep endent: for any two se gment sc or e functions s 1 , s 2 , the interp olate d attribu- tions ar e identic al. Conse quently, interp olation violates se gment monotonicity. In terp olation weigh ts are determined en tirely b y spatial co ordinates; the op- erator is indep enden t of the score function s . The mo del’s semantic structure is invisible to the op erator: within any neigh b ourhoo d where the kernel assigns unequal weigh ts to tw o pixels, one can alw ays c ho ose scores so that the higher- scored pixel receiv es less attribution, directly violating (D2). Theorem 3 (Interpolation Violates Lo calit y). When kernel supp ort ex- tends outside a neighb ourho o d, b oundary pixel attributions dep end on external data. Sp e cific al ly, ther e exist A 1 , A 2 agr e eing on N k with ˜ A 1 ( x 0 ) = ˜ A 2 ( x 0 ) for b oundary pixel x 0 ∈ N k . A djacent neighbourho o ds influence b oundary attributions whenever a k ernel spans the b oundary . F ull pro of in the supplemen tal material. These failures reflect a fundamental mismatch: in terp olation reconstructs a con tinuous signal; attribution upsampling must allo cate mass according to prediction relev ance. 3.3 Desiderata for F aithful Upsampling Ha ving established what faithful redistribution c annot be, w e now formalize what it demands . In the axiomatic tradition of feature attribution [ 35 , 61 ], we iden tify four desiderata that any faithful upsampling operator must satisfy . Desideratum (D1) Neighbourho o d Completeness F or all k : X x ∈ N k ˜ A ( x ) = M k (4) A ttribution mass is conserved within each neighbourho od. This directly ex- tends the c ompleteness axiom that characterizes both Shapley v alues [ 35 ] and In tegrated Gradients [ 61 ]: just as Shapley v alues ensure pla yer contributions sum to the coalition v alue, (D1) ensures pixel attributions sum to the neighbourho od mass. A ttribution Upsampling should Redistribute, Not In terp olate 9 Desideratum (D2) Segment Monotonicit y F or x, y ∈ N k with M k ≥ 0 : s ( σ ( x )) ≥ s ( σ ( y )) = ⇒ ˜ A ( x ) ≥ ˜ A ( y ) (5) Higher segment scores yield higher attributions, reflecting the sensitivity principle from In tegrated Gradients: if the mo del considers a segment more im- p ortan t, its pixels should receiv e prop ortionally more attribution. Desideratum (D3) Constant Conditioning Strength F or potential φ : [0 , 1] → R > 0 and temp erature ε > 0 : φ ( s + ∆ ) φ ( s ) = exp( ∆/ε ) , indep enden t of s (6) The relativ e effect of score changes is uniform across the score range, ensur- ing that a fixed score difference ∆ has the same redistributive effect whether it o ccurs among low-score or high-score segments. Alternative p otentials lack this: a pow er-la w φ ( s ) = s γ compresses ratios at high scores and amplifies them near zero (see the supplemental material). (D3) demands score-in v arian t sensitivit y , a uniformity property related to Luce’s constant-ratio rule [ 6 ]: the multiplica- tiv e effect of a score difference ∆ on weigh ts must be the same at ev ery base score. With out this, iden tical score gaps pro duce different redistributive effects dep ending on the score range (see the supplemental material for concrete exam- ples). Desideratum (D4) Lo calit y ˜ A ( x ) = f M ν ( x ) , { s ( σ ( y )) } y ∈ N ν ( x ) (7) for some function f . That is, ˜ A ( x ) dep ends only on the mass and segment scores within its o wn neighbourho o d. Changes outside the neigh b ourhoo d do not affect attributions inside it, en- suring computational tractability and preven ting error propagation from distan t regions. 3.4 Uniqueness and the USU Op erator W e no w sho w that any op erator satisfying (D1), (D2), and (D4) must take a spe- cific ratio form, paralleling ho w completeness, symmetry , and linearit y uniquely determine Shapley v alues. Redistribution requires that scaling a neigh b ourhoo d’s mass scales every pixel’s share identically; otherwise the allo cation rule itself de- p ends on the total, conflating how much to distribute with wher e . This linearity 10 V. Buono et al. in mass gives ˜ A ( x ) = M k · w k ( x ) for weigh t function w k dep ending only on seg- men t scores, paralleling the linearity axiom for Shapley v alues [ 35 ]. Theorem 4 (Uniqueness of the Ratio F orm). Any line ar-in-mass op- er ator satisfying (D1) c onservation, (D4) lo c ality, and (D2) monotonicity must have the r atio form: U ( M k , s )( x ) = M k · φ ( s ( σ ( x ))) P y ∈ N k φ ( s ( σ ( y ))) (8) for some strictly p ositive, strictly monotone p otential φ : [0 , 1] → R > 0 . Pr o of (Pr o of sketch). The pro of pro ceeds in three steps. Step 1 (I IA from Lo calit y). (D4) implies Independence of Irrelev ant Alternativ es: the ratio R ( a, b ) = w ( s a ) /w ( s b ) is independent of other alternativ es in the neighbourho o d. Step 2 (Cauc hy F unctional Equation). I IA yields transitivit y R ( a, b ) · R ( b, c ) = R ( a, c ) , the m ultiplicative Cauch y equation. Under con tinuit y and (D2) monotonicit y , the unique solution is R ( a, b ) = φ ( a ) /φ ( b ) for con tinuous, strictly monotone φ . Step 3 (Conserv ation F orces Normalization). Conserv ation (D1) requires P x ∈ N k w k ( x ) = 1 with w k ( x ) ∝ φ ( s ( σ ( x ))) , whic h forces the ratio form. F ull proof in the supplemental material. This parallels how Luce’s I IA uniquely characterizes the m ultinomial logit mo del in c hoice theory [ 6 , 7 , 39 , 53 ]. The characterization is layer e d : (D1), (D2), and (D4) force the ratio form for any strictly monotone p oten tial φ ; (D3) then uniquely pins do wn the p oten tial, so that all four together admit exactly one op erator (up to temp erature). Alternativ e p oten tials sacrifice (D3)’s score- in v ariance but retain (D1)–(D2)–(D4); see the supplemental material for analysis of this tradeoff. The USU Op er ator. USU instantiates the ratio form with the tensor p otential , whic h satisfies (D3) by dire ct computation: φ ( s + ∆ ) /φ ( s ) = exp( ∆/ε ) , inde- p enden t of s . A ttribution Upsampling should Redistribute, Not In terp olate 11 USU Op erator Giv en temp erature ε > 0 , the tensor potential φ ( s ) = exp s − 0 . 5 ε , (9) defines the normalized weigh t for pixel x in neigh b ourho od k : w k ( x ) = φ ( s ( σ ( x ))) P y ∈ N k φ ( s ( σ ( y ))) , (10) and the USU fused attribution : ˜ A ( x ) = M ν ( x ) · w ν ( x ) ( x ) . (11) USU op erates as a semantic softmax: segmen t scores pass through the non- linear p otential φ , are normalized within each neighbourho od, and redistribute mass prop ortionally . Though linear in mass (scaling the input scales the output), the op erator is non-linear in scores through φ . Theorem 5 ((D1)–(D4) Satisfaction). USU with the tensor p otential satis- fies al l four desider ata. Sp e cific al ly: (D1) weight normalization ensur es P x ∈ N k ˜ A ( x ) = M k ; (D2) the exp onential is strictly incr e asing, so higher sc or es yield higher weights when M k ≥ 0 ; (D3) the tensor p otential satisfies c onstant c onditioning by c onstruction; (D4) ˜ A ( x ) dep ends only on M ν ( x ) and sc or es within N ν ( x ) . Corollary 1 (Global Conserv ation). Sinc e N p artitions Ω , summing (D1) over al l neighb ourho o ds yields glob al mass c onservation: X x ∈ Ω ˜ A ( x ) = X x ∈ Ω A ( x ) . (12) Err or Minimization. (D1) ensures zero net mass error per neighbourho od when the coarse attribution faithfully aggregates ground truth: if M k = P x ∈ N k A ∗ ( x ) , then b oth α - and β -errors from ( 3 ) satisfy ∆ − k = ∆ + k = 0 . USU provides the tigh test p ossible mass-level guarantee. F ull error analysis in the supplemental material. 3.5 The Attribution Basin Problem Strict mass conserv ation (D1) guaran tees that each neigh b ourhoo d’s attribu- tion total is preserv ed exactly , faithful to the coarse explanation. But consider a neigh b ourho od whose attribution mass lies in a b asin : a region of mo derate im- p ortance enclosed by lo w-attribution neighbours. (D1) traps this mass in place ev en when the mo del’s segmen t scores indicate that semantically imp ortant pix- els nearb y deserve more. The result is a pit in the attribution landscap e 12 V. Buono et al. that no amount of within-neighbourho o d redistribution can fill. This exp oses a tension b et w een tw o notions of faithfulness: fidelity to the coarse heatmap v ersus fidelit y to the mo del’s o wn semantic judgemen ts. This exp oses a tension b etw een he atmap faithfulness (D1: each neighbour- ho od’s mass matc hes the coarse attribution exactly) and mo del faithfulness (the mo del’s segment scores gov ern mass allo cation across the full lattice). When the coarse attribution is itself imp erfect, strict (D1) preserv es these imp erfections. Imp ortanc e-weighte d r e distribution. Soft IWMR (Imp ortance-W eighted Mass Redistribution) relaxes (D1) by redistributing the global mass M total = P k M k according to neigh bourho o d imp ortance. Each neighbourho od receiv es imp or- tance λ k = max p ∈ P k s p , where P k = { p : N k ∩ S p = ∅} indexes segmen ts inter- secting N k . Soft IWMR Op erator The imp ortance p oten tial and redistribution w eights : Λ ( λ ) = exp λ − 0 . 5 ε Λ , ρ k = Λ ( λ k ) · | N k | P j Λ ( λ j ) · | N j | , (13) yield redistributed masses and the IWMR fused attribution : ˜ M k = M total · ρ k , ˜ A IWMR ( x ) = ˜ M ν ( x ) · w ν ( x ) ( x ) . (14) The within-neighbourho od w eigh ts w k ( x ) are identical to USU ( 10 ); only the mass input c hanges from M k to ˜ M k . Soft IWMR inten tionally violates (D1) but satisfies a gener alize d complete- ness (D1-G): P x ∈ N k ˜ A IWMR ( x ) = ˜ M k . It preserv es (D2), (D3), and a semi- lo cal form of (D4), as well as global conserv ation with zero-sum mass flow ( P k ( ˜ M k − M k ) = 0 ). This modularity is by design: eac h desideratum addresses an indep enden t concern (mass conserv ation, seman tic ordering, calibration, lo- calit y), so relaxing one for a specific op erational reason do es not compromise the others. Just as the lay ered characterization p ermits alternativ e potentials φ while retaining (D1)–(D2)–(D4) guarantees (Theorem 4 ), Soft IWMR relaxes (D1) to correct coarse-attribution bias while preserving the remaining three. F ull formal statemen t and pro ofs in the supplemen tal material. T emp er atur e c ontr ol. ε Λ go verns the strength of inter-neigh b ourhoo d redistribu- tion: small v alues concentrate mass in high-imp ortance neighbourho o ds, while large v alues approach uniformity . When all imp ortances are equal, ˜ M k = M k and IWMR reduces to standard USU. Hier ar chic al b oundary r efinement. The segmentation partition S that defines these scores has so far b een assumed, not derived. F or the resulting explanations to be faithful, b oundaries must emerge from the mo del’s o wn reasoning, refined A ttribution Upsampling should Redistribute, Not In terp olate 13 (ours) USU-IWMR (ours) USU-IWMR e ( x ) Ground T r uth p erio dic-t 224p x 224p x 7p x e ( x ) Ground T r uth concw a v e 224p x 224p x 7p x ↑ Syn thethic ↑ Syn thethic ↓ in the wild e ( x ) Ground T r uth c hi c k adee N//A 224p x 224p x 7p x e ( x ) Ground T ruth stop w atc h N//A 224p x 224p x 7p x Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Fig. 4: Qualitative comparison. T op row: synthetic patterns with known ground- truth attribution priors. Bottom row: ImageNet examples with GradCAM attributions. In terp olation metho ds (bilinear, bicubic, Lanczos) pro duce ringing artifacts, b oundary bleeding, and aliasing; USU preserves semantic boundaries and concen trates attribution within mo del-relev an t regions. where the mo del’s scores transition across segments and left coarse where scores are homogeneous. No single segmentation scale ac hieves this: a coarse partition groups semantically distinct regions under a shared score; a fine partition frag- men ts coherent ones. The k ey insight is to let sc or e heter o geneity itself select b oundary resolution: start from the coarsest partition, identify where imp ortance transitions o ccur, and refine only there. The result is a m ulti-scale attribution whose b oundaries shift to match the mo del’s o wn reasoning. Since each recur- sion step applies USU, neigh b ourhoo d completeness propagates inductiv ely and the full pip eline preserv es total attribution mass. F ull formalization (b oundary op erator, depth recursion, and stopping criterion) app ears in the supplemental material. 4 Exp erimen ts W e ev aluate USU along t wo axes: (1) con trolled syn thetic tasks with kno wn attribution priors, v erifying formal guarantees (Section 4.1 ); and (2) standard b enc hmarks with pretrained mo dels, confirming practical faithfulness gains (Sec- tion 4.2 ; Figure 4 ). 14 V. Buono et al. T able 1: Con trolled v alidation: shap e classification. IoU ( ↑ ), Conc. ( ↑ ), PG ( ↑ ). Bold is b est non-oracle; oracles use ground-truth scores. Mo del Metho d IoU Conc. PG RRL-CNN Bilinear 0.79 0.54 0.78 Bicubic 0.82 0.59 0.79 USU 0.86 0.76 1.00 Oracle-USU 0.96 0.88 1.00 Oracle-IWMR 1.00 0.85 1.00 T able 2: Desiderata verification on ImageNet + VGG16. ✓ = satisfied; ✗ = violated. D1 Error is mean absolute neigh b ourho od mass discrepancy . Metho d D1 D2 D3 D4 D1 Error Bilinear ✗ ✗ ✗ ✗ 1 . 23 × 10 − 1 Bicubic ✗ ✗ ✗ ✗ 8 . 65 × 10 − 1 Lanczos-3 ✗ ✗ ✗ ✗ 2 . 14 × 10 − 2 USU-Fixed ✓ ✓ ✓ ✓ 4 . 95 × 10 − 7 USU-IWMR ✗ ✓ ✓ ✓ 3 . 81 × 10 − 4 4.1 Con trolled V alidation with A ttribution Priors Setup. W e design syn thetic shape classification tasks (circle/triangle/square) with known ground-truth attributions, training v anilla and RRL-constrained [ 50 ] CNN/MLP architectures. Coarse attributions at resolutions { 4 , 7 , 14 } are up- sampled via interpolation baselines, USU, USU-IWMR, and oracle v arian ts. F ull setup and metrics in the supplemen tal material. R esults. T able 1 confirms USU’s formal guarantees empirically . Oracle-IWMR ac hieves p erfect IoU (1.00), confirming the theoretical ceiling. USU outperforms all interpolation baselines: on RRL-CNN, IoU rises from 0.79 to 0.86 and p ointing game from 78% to 100%, with concen tration improving 0 . 54 → 0 . 76 as USU am- plifies prop er attribution priors. The USU–Oracle gap (0.86 vs. 0.96) quan tifies headro om from imperfect segmen t scoring. Qualitativ ely , USU-IWMR recov ers distinct attribution patterns (Figure 4 , top) where in terp olation collapses them (Figure 3 ). T able 2 v alidates the formal desiderata: USU-Fixed achiev es (D1) conserv ation at numerical precision ( 4 . 95 × 10 − 7 ), three to four orders b elo w in terp olation, consisten t with Theorems 1 to 3 . 4.2 In-the-Wild F aithfulness Ev aluation Setup. W e sample 1,000 images eac h from ImageNet [ 51 ], CIF AR-10 [ 31 ], and CUB-200 [ 66 ], ev aluated on VGG16 [ 56 ], ResNet50 [ 20 ], and ViT-B-16 [ 13 ]. Since USU’s guarantees dep end only on the tuple ( M k , s, N , S ) (Theorem 4 ), results are consisten t across attribution methods; we rep ort GradCAM as representa- tiv e (seven-method comparison in the supplemen tal material). Primary metric: Infidelit y ↓ from Quan tus [ 21 ]; additional metrics in the supplemental material. R esults. T able 3 rep orts Infidelit y across all nine dataset–model com binations. USU reduces Infidelit y by one to four orders of magnitude o ver bilinear (Wilcoxon signed-rank p < 0 . 001 , Bonferroni-corrected). Gains are largest on ViT-B-16, whose 14 × 14 patc h structure aligns naturally with segmen t boundaries, and smallest on CUB-200 + ResNet50, where fine-grained texture classes limit segmen tation- based redistribution. These magnitudes reflect Infidelity’s quadratic sensitivity A ttribution Upsampling should Redistribute, Not In terp olate 15 T able 3: Infidelit y ( ↓ ) across datasets and mo dels. USU ac hieves one to four orders of magnitude improv ement o ver in terp olation baselines. Best in b old , second- b est underlined. Dataset Mo del Bilinear Bicubic Lanczos USU USU IWMR V GG16 6 . 91 × 10 6 7 . 82 × 10 6 8 . 14 × 10 6 1 . 14 × 10 5 1 . 28 × 10 5 ImageNet ResNet50 4 . 87 × 10 7 5 . 41 × 10 7 5 . 63 × 10 7 2 . 21 × 10 5 2 . 45 × 10 5 ViT-B-16 2 . 19 × 10 8 2 . 48 × 10 8 2 . 59 × 10 8 7 . 02 × 10 5 7 . 85 × 10 5 V GG16 3 . 12 × 10 7 3 . 55 × 10 7 3 . 71 × 10 7 7 . 12 × 10 4 6 . 47 × 10 4 CIF AR-10 ResNet50 8 . 95 × 10 7 9 . 87 × 10 7 1 . 02 × 10 8 2 . 21 × 10 5 2 . 38 × 10 5 ViT-B-16 2 . 57 × 10 8 2 . 89 × 10 8 3 . 01 × 10 8 2 . 15 × 10 4 1 . 99 × 10 4 V GG16 5 . 44 × 10 6 6 . 12 × 10 6 6 . 38 × 10 6 1 . 82 × 10 3 1 . 70 × 10 3 CUB-200 ResNet50 8 . 46 × 10 7 9 . 32 × 10 7 9 . 68 × 10 7 1 . 52 × 10 7 1 . 41 × 10 7 ViT-B-16 1 . 83 × 10 8 2 . 05 × 10 8 2 . 14 × 10 8 5 . 08 × 10 4 5 . 61 × 10 4 to systematic mass violations: in terp olation injects coheren t boundary errors at every neighbourho o d (Theorem 1 ), which accum ulate across hundreds of b oundary-crossing regions; USU eliminates this entire error class by construc- tion (D1, verified to 10 − 7 precision; T able 2 ), leaving only residual segmentation noise. USU-IWMR outperforms USU-Fixed on CIF AR-10 and CUB-200 where coarse attributions exhibit background bias ( ε =0 . 1 optimal). F ull ablations in the supplemen tal material. 5 Conclusion A ttribution methods still upsample saliency maps with in terp olation techniques designed for natural images, not saliency maps. W e ha ve shown that faithful upsampling is not this solv ed implemen tation detail but a theoretically con- strained op eration that admits a unique ratio-form solution. F our desiderata formalize what faithful upsampling requires; standard interpolation structurally violates three, pro ducing artifacts that distort what practitioners see and cor- rupt what faithfulness metrics measure. USU emerges as the unique ratio-form op erator satisfying all four, with uniqueness forced b y Luce’s Indep endence of Irrelev ant Alternatives. USU is a metho d-agnostic drop-in replacement for in- terp olation, deliv ering one to four orders-of-magnitude faithfuln ess gains across three datasets, three arc hitectures, and seven attribution methods. Limitations and futur e work. The uniqueness characterization holds for oper- ators whose allo cation weigh ts are indep endent of the mass b eing distributed (linearit y in mass), the standard redistribution assumption and the direct ana- logue of Shapley linearit y . Extending the c haracterization to mass-dependent w eighting is an open direction. 16 V. Buono et al. References 1. Abnar, S., Zuidema, W.: Quantifying attention flow in transformers (2020). https: //doi.org/10.18653/v1/2020.acl- main.385 4 2. Agarw al, C., Saxena, E., Krishna, S., Pa welczyk, M., Johnson, N., Puri, I., Zitnik, M., Lakk ara ju, H.: Op enxai: T ow ards a transparen t ev aluation of mo del explana- tions (2022) 6 3. Arras, L., Osman, A., Samek, W.: Clevr-xai: A b enchmark dataset for the ground truth ev aluation of neural net work explanations (2020). https : / / doi . org / 10 . 1016/j.inffus.2021.11.008 6 4. Barr, B., F atsi, N., Hancox-Li, L., Ric hter, P ., Proano, D., Mok, C.: The disagree- men t problem in faithfulness metrics (2023). https:/ /doi.org/10.48550/arXiv. 2311.07763 6 5. Bilo deau, B., Jaques, N., Koh, P .W., Kim, B.: Imp ossibilit y theorems for feature attribution (2022). https://doi.org/10.1073/pnas.2304406120 3 , 5 , 29 6. Breitmoser, Y.: An axiomatic foundation of conditional logit (2020). https://doi. org/10.1007/s00199- 020- 01281- 1 4 , 5 , 9 , 10 , 30 7. Cerreia-Vioglio, S., Maccheroni, F., Marinacci, M., Rustic hini, A.: Multinomial logit processes and preference discov ery: inside and outside the blac k b o x (2022). https://doi.org/10.1093/restud/rdac046 5 , 10 , 30 8. Chattopadh ya y , A., Sark ar, A., Howlader, P ., Balasubramanian, V.: Grad-cam++: Generalized gradien t-based visual explanations for deep conv olutional netw orks (2017). https://doi.org/10.1109/WACV.2018.00097 4 9. Chefer, H., Gur, S., W olf, L.: T ransformer in terpretability beyond attention visu- alization (2020). https://doi.org/10.1109/CVPR46437.2021.00084 4 10. Chefer, H., Gur, S., W olf, L.: Generic attention-model explainability for inter- preting bi-mo dal and enco der-decoder transformers (2021). https://doi.org/10. 1109/ICCV48922.2021.00045 4 11. Clark, B., Wilming, R., Haufe, S.: Xai-tris: non-linear image b enc hmarks to quan tify false positive p ost-hoc attribution of feature imp ortance (2023). https : //doi.org/10.1007/s10994- 024- 06574- 3 6 12. Deng, H., Zou, N., Du, M., Chen, W., F eng, G., Y ang, Z., Li, Z., Zhang, Q.: Unifying fourteen p ost-ho c attribution metho ds with taylor in teractions (2024). https://doi.org/10.1109/TPAMI.2024.3358410 5 13. Doso vitskiy , A., Beyer, L., Kolesnik ov, A., W eissen b orn, D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer, M., Heigold, G., Gelly , S., Uszk oreit, J., Houlsby , N.: An image is worth 16x16 w ords: T ransformers for image recognition at scale (2021) 14 14. Draelos, R., Carin, L.: Use hirescam instead of grad-cam for faithful explanations of conv olutional neural netw orks (2020) 4 15. Engleb ert, A., Corn u, O., Vleeschou w er, C.: P oly-cam: high resolution class acti- v ation map for conv olutional neural netw orks (2022). https://doi.org/10.1007/ s00138- 024- 01567- 7 5 16. F umagalli, F., Muschalik, M., Hüllermeier, E., Hammer, B., Herbinger, J.: Unifying feature-based explanations with functional anov a and coop erativ e game theory (2024). https://doi.org/10.48550/arXiv.2412.17152 5 17. Gev aert, A., Saeys, Y.: Unifying attribution-based explanations using functional decomp osition (2024). https://doi.org/10.48550/arXiv.2412.13623 5 18. Harris, C., Pymar, R., Ro wat, C.: Join t shapley v alues: a measure of join t feature imp ortance (2021) 5 A ttribution Upsampling should Redistribute, Not In terp olate 17 19. Hartley , T., Sidorov, K., Willis, C., Marshall, D.: Jitter-cam: Improving the spatial resolution of cam-based explanations (2021). https://doi.org/10.5244/c.35.150 5 20. He, K., Zhang, X., Ren, S., Sun, J.: Deep residual learning for image recognition (2016). https://doi.org/10.1109/CVPR.2016.90 14 21. Hedström, A., W eb er, L., Bareev a, D., Motzkus, F., Samek, W., Lapuschkin, S., Höhne, M.: Quan tus: An explainable ai to olkit for resp onsible ev aluation of neural net work explanations (2022) 6 , 14 , 41 22. Hinns, J., Martens, D.: Aggregating lo cal saliency maps for semi-global explainable image classification (2025). https://doi.org/10.48550/arXiv.2506.23247 5 23. Ho ok er, S., Erhan, D., Kindermans, P .J., Kim, B.: A b enc hmark for interpretabilit y metho ds in deep neural netw orks (2018) 6 24. Ibrahim, R., Shafiq, M.O.: Explainable conv olutional neural net works: A taxonomy , review, and future directions (2022). https://doi.org/10.1145/3563691 4 25. Jalw ana, M., Akhtar, N., Bennamoun, Mian, A.: Cameras: Enhanced resolution and sanit y preserving class activ ation mapping for image saliency (2021). https : //doi.org/10.1109/CVPR46437.2021.01606 5 26. Janizek, J.D., Sturmfels, P ., Lee, S.I.: Explaining explanations: Axiomatic feature in teractions for deep net works (2020) 5 27. Jiang, P .T., Zhang, C.B., Hou, Q., Cheng, M.M., W ei, Y.: Lay ercam: Exploring hierarc hical class activ ation maps for lo calization (2021). https :/ /doi . org/ 10. 1109/TIP.2021.3089943 5 28. Kapishnik ov, A., Bolukbasi, T., Vi’egas, F., T erry , M.: Xrai: Better attributions through regions (2019). https://doi.org/10.1109/ICCV.2019.00505 5 29. Keys, R.: Cubic conv olution interpolation for digital image pro cessing (1981). https://doi.org/10.1109/TASSP.1981.1163711 2 , 7 30. K okhlikyan, N., Miglani, V., Martin, M., W ang, E., Alsallakh, B., Reynolds, J., Melnik ov, A., Kliushkina, N., Aray a, C., Y an, S., Reblitz-Richardson, O.: Captum: A unified and generic model in terpretability library for p ytorch (2020) 6 31. Krizhevsky , A., Hin ton, G.: Learning multiple lay ers of features from tiny images. T ec h. rep., Universit y of T oronto (2009) 14 32. Kumar, I.E., V enk atasubramanian, S., Scheidegger, C., F riedler, S.A.: Problems with shapley-v alue-based explanations as feature imp ortance measures (2020) 5 33. K won, Y., Zou, J.Y.: W eightedshap: analyzing and improving shapley based feature attributions (2022). https://doi.org/10.48550/arXiv.2209.13429 5 34. Luce, R.: Individual choice b eha vior: A theoretical analysis (1979). https://doi. org/10.1037/14396- 000 22 , 30 35. Lundb erg, S.M., Lee, S.I.: A unified approach to interpreting mo del predictions (2017) 2 , 4 , 5 , 8 , 10 , 29 36. Lundstrom, D., Huang, T., Raza viya yn, M.: A rigorous study of in tegrated gradi- en ts method and extensions to internal neuron attributions (2022) 5 37. Lundstrom, D., Raza viya yn, M.: Distributing synergy functions: Unifying game- theoretic interaction metho ds for machine-learning explainabilit y (2023). https: //doi.org/10.48550/arXiv.2305.03100 5 38. Lundstrom, D., Raza viya yn, M.: F our axiomatic characterizations of the in tegrated gradien ts attribution metho d (2023). https :/ / doi. org /10 . 48550 / arXiv .2306 . 13753 5 39. McF adden, D.: Conditional logit analysis of qualitative choice b eha vior (1972) 10 , 30 40. Merrill, J., W ard, G., Kamk ar, S., Budzik, J., Merrill, D.C.: Generalized integrated gradien ts: A practical method for explaining div erse ensembles (2019) 5 18 V. Buono et al. 41. Mir’o-Nicolau, M., i Cap’o, A.J., Moy à-Alco ver, G.: A comprehensive study on fidelit y metrics for xai (2024). https://doi.org/10.48550/arXiv.2401.10640 6 42. Mitc hell, D.P ., Netra v ali, A.N.: Reconstruction filters in computer graphics (1988). https://doi.org/10.1145/54852.378514 2 , 7 43. Mon tav on, G., Samek, W., Müller, K.: Methods for interpreting and understanding deep neural netw orks (2017). https://doi.org/10.1016/j.dsp.2017.10.011 2 , 4 44. Morbidelli, P ., Carrera, D., Rossi, B., F ragneto, P ., Boracc hi, G.: Augmented grad- cam: Heat-maps super resolution through augmentation (2020). https://doi.org/ 10.1109/ICASSP40776.2020.9054416 5 45. Oh, Y., Jung, H., Park, J., Kim, M.S.: Evet: Enhancing visual explanations of deep neural net works using image transformations (2021). https://doi.org/10.1109/ WACV48630.2021.00362 5 46. P etsiuk, V., Das, A., Saenk o, K.: Rise: Randomized input sampling for explanation of black-box mo dels (2018) 2 , 4 , 6 47. Picard, A., Boissin, T., Subhash, V., Cadene, R., F el, T.: Back to the baseline: Examining baseline effects on explainability metrics (2025). https://doi.org/10. 48550/arXiv.2512.11433 6 48. Rib eiro, M.T., Singh, S., Guestrin, C.: “wh y should i trust you?”: Explaining the predictions of an y classifier (2016). https: //doi.org/ 10.1145/2939672. 2939778 4 49. Rong, Y., Leemann, T., Borisov, V., Kasneci, G., Kasneci, E.: A consistent and efficien t ev aluation strategy for attribution metho ds (2022) 6 50. Ross, A., Hughes, M., Doshi-V elez, F.: Right for the right reasons: T raining differ- en tiable mo dels b y constraining their explanations (2017). https:// doi.org/10. 24963/ijcai.2017/371 3 , 6 , 14 , 41 51. Russak ovsky , O., Deng, J., Su, H., Krause, J., Satheesh, S., Ma, S., Huang, Z., Karpath y , A., Khosla, A., Bernstein, M., Berg, A.C., F ei-F ei, L.: Imagenet large scale visual recognition c hallenge (2015). https://doi.org/10.1007/s11263- 015- 0816- y 14 52. Samek, W., Binder, A., Monta v on, G., Lapuschkin, S., Müller, K.: Ev aluating the visualization of what a deep neural netw ork has learned (2015). https://doi.org/ 10.1109/TNNLS.2016.2599820 6 53. Sandomirskiy , F., T amuz, O.: Decomp osable sto c hastic choice (2024). https : // doi.org/10.1145/3670865.3673590 10 , 30 54. Selv ara ju, R.R., Das, A., V edantam, R., Cogswell, M., Parikh, D., Batra, D.: Grad-cam: Visual explanations from deep n et w orks via gradient-based lo calization (2016). https://doi.org/10.1007/s11263- 019- 01228- 7 2 , 4 55. Shrikumar, A., Greenside, P ., Kunda je, A.B.: Learning imp ortan t features through propagating activ ation differences (2017) 4 56. Simon yan, K., Zisserman, A.: V ery deep conv olutional net works for large-scale image recognition (2015) 14 57. Sriniv as, S., Fleuret, F.: F ull-gradien t represen tation for neural netw ork visualiza- tion (2019) 5 58. Stassin, S., Engleb ert, A., Nanfack, G., Alb ert, J., V ersbraegen, N., Peiffer, G., Doh, M., Riche, N., F rénay , B., Vleesc houw er, C.: An exp erimen tal inv estigation in to the ev aluation of explainability metho ds (2023). https://doi.org/10.48550/ arXiv.2305.16361 6 59. Sundarara jan, M., Dhamdhere, K., Agarw al, A.: The shapley taylor in teraction index (2019) 5 60. Sundarara jan, M., Na jmi, A.: The many shapley v alues for model explanation (2019) 3 , 5 A ttribution Upsampling should Redistribute, Not In terp olate 19 61. Sundarara jan, M., T aly , A., Y an, Q.: Axiomatic attribution for deep netw orks (2017) 2 , 3 , 4 , 5 , 8 , 29 62. Szandała, T.: Enhancing deep neural net work saliency visualizations with gradual extrap olation (2021). https://doi.org/10.1109/ACCESS.2021.3093824 5 63. T aimeskhano v, M., Garreau, D.: F eature attribution from first principles (2025). https://doi.org/10.48550/arXiv.2505.24729 5 64. T aimeskhano v, M., Sicre, R., Garreau, D.: Cam-based metho ds can see through w alls (2024). https://doi.org/10.48550/arXiv.2404.01964 5 65. V erdinelli, I., W asserman, L.: F eature importance: A closer lo ok at shapley v alues and lo co (2023). https://doi.org/10.1214/24- sts937 5 66. W ah, C., Branson, S., W elinder, P ., Perona, P ., Belongie, S.: The caltech-ucsd birds- 200-2011 dataset. T ech. Rep. CNS-TR-2011-001, California Institute of T ec hnology (2011) 14 67. W ang, H., W ang, Z., Du, M., Y ang, F., Zhang, Z., Ding, S., Mardziel, P .P ., Hu, X.: Score-cam: Score-weigh ted visual explanations for conv olutional neural netw orks (2019). https://doi.org/10.1109/CVPRW50498.2020.00020 4 68. Y ang, M., Kim, B.: Benc hmarking attribution metho ds with relativ e feature im- p ortance (2019) 6 69. Zhou, B., Khosla, A., Àgata Lap edriza, Oliv a, A., T orralba, A.: Learning deep features for discriminative lo calization (2015). https: //doi .org/ 10.1109 /CVPR . 2016.319 4 70. Štrum b elj, E., Kononenk o, I.: Explaining prediction mo dels and individual predic- tions with feature contributions (2014). https:/ /doi.org/10.1007/ s10115 - 013- 0679- x 5 20 V. Buono et al. Supplement ar y Ma terial A ttribution Upsampling should Redistribute, Not In terp olate ⋄ Overview. This supplemen t deliv ers: (i) complete pro ofs of all theorems deferred from the main pap er, (ii) an extended discussion situating USU within axiomatic attribution and choice theory , (iii) algorithmic details for hierarc hical b oundary refinemen t, and (iv) comprehensive empirical results across nine configurations spanning three datasets and three mo dels, with seven attribution metho ds. All pro ofs are self-contained and v erify desiderata satisfaction (D1-D4), global con- serv ation, merge conserv ation, and full pip eline completeness. Roadmap. Section A delivers the pro ofs deferred from the main pap er: interpo- lation violations, the uniqueness theorem, Soft IWMR properties, score p oten tial analysis, and combined desiderata verification. Section B provides extended the- oretical context, connecting USU to axiomatic attribution, resolution gaps in existing metho ds, and the choice-theoretic foundations that motiv ate the ratio form. Section C formalizes hierarchical b oundary refinemen t: definitions, H-map, b oundary op erator, adaptiv e mixing, merge, and mass conserv ation through re- cursion. Section D develops the α / β -error decomp osition. Section E details the syn thetic exp erimen ts with full results across all metho ds and mo del families. Section F defines the six Quan tus ev aluation metrics. Section G describ es the statistical metho dology (Wilco xon tests, effect sizes, confidence interv als). Sec- tion H demonstrates attribution-metho d indep endence across sev en CAM-family sources. Section I pro vides complete results for ImageNet, CIF AR-10, and CUB- 200. A Deferred Proofs This section deliv ers the proofs deferred from the main pap er, organized to mir- ror the lay ered c haracterization: we first show in terp olation fails (Section A.1 ), then establish the ratio form’s uniqueness (Section A.2 ), analyze relaxations (Section A.3 ), iden tify the tensor p otential (Section A.4 ), and v erify combined satisfaction (Section A.5 ). A.1 In terp olation Violation Pro ofs The main pap er iden tifies three structural violations of the upsampling desider- ata by standard interpolation (Theorems 1 to 3 ). W e present the full proofs here, organized by causal depth. The ro ot cause is semantic blindness : in terp olation A ttribution Upsampling should Redistribute, Not In terp olate 21 w eights dep end solely on spatial co ordinates, making the op erator structurally incapable of incorp orating the mo del’s reasoning. T w o geometric consequences follo w: mass leak age across neighbourho o d boundaries and non-lo cal dep enden- cies at boundary pixels, completing the case that in terp olation is fundamentally incompatible with faithful attribution upsampling. R o ot c ause: Semantic blindness. Interpolation treats attribution maps as band-limited signals to b e smoothly reconstructed. The in terp olated v alue ˜ A ( x ) = P z K ( x, z ) · A ( z ) is defined entirely by the kernel K , which enco des spatial proximit y , not the model’s semantic relev ance. The segmen t scores s , the neighbourho od partition N , and the segmen tation S are ab- sen t from the computation. This absence is not an o versigh t; it is intrinsic to the in terp olation paradigm. Pr o of (Pr o of of The or em 2 (Interp olation Ignor es Semantics)). Sc or e indep en- denc e. F or any t wo segment score functions s 1 and s 2 , the interpolated output is iden tical: ˜ A ( x ) = X z K ( x, z ) · A ( z ) , since s does not app ear in the computation. The output depends only on A and the k ernel K . Monotonicity violation. It suffices to exhibit an attribution A and pixels x, y ∈ N k in distinct segments with ˜ A ( x ) = ˜ A ( y ) and M k ≥ 0 . Any k ernel whose weigh ts v ary with position (bilinear, bicubic, and all higher-order v ariants) produces suc h non-uniform outputs within a neighbourho od. Suppose ˜ A ( x ) > ˜ A ( y ) . Since in terp olated v alues are score-indep enden t, assigning s ( σ ( y )) > s ( σ ( x )) does not c hange the output, yet (D2) requires ˜ A ( y ) ≥ ˜ A ( x ) , a con tradiction. Score independence is the defining limitation: no interpolation k ernel, regard- less of shap e, order, or support size, can incorp orate the model’s reasoning into the upsampling. Ge ometric c onse quenc e I: Mass le akage. Seman tic blindness means interpolation also ignores the neighbourho od partition N . Since k ernels are designed for signal reconstruction, not mass redistribution, their support routinely spans neigh b ourhoo d boundaries, causing attribution mass to leak b et w een neighbourho o ds. Pr o of (Pr o of of The or em 1 (Mass Conservation Violation)). Let x 0 ∈ N k b e a b oundary pixel whose k ernel supp ort includes y ∈ N k ′ \ N k ( k ′ = k ) with non- zero w eight w y = K ( x 0 , y ) = 0 , where no other pixel in N k has y in its support. Construct the indicator attribution A = 1 { y } , so M k = 0 . Since only x 0 receiv es a con tribution from y : X x ∈ N k ˜ A ( x ) = K ( x 0 , y ) = w y . 22 V. Buono et al. Since w y = 0 while M k = 0 , mass conserv ation is violated. Mass leak age is not a rare corner case: it occurs at ev ery neigh b ourhoo d b oundary where the k ernel supp ort spans the partition. Ge ometric c onse quenc e II: Non-lo c al c ontamination. The same b oundary-spanning supp ort that causes mass leak age also vio- lates lo calit y: a pixel’s attribution can dep end on data from adjacent neigh- b ourhoo ds. Pr o of (Pr o of of The or em 3 (L o c ality Violation)). Using the same b oundary pixel x 0 and external pixel y with non-zero w eight w y = K ( x 0 , y ) = 0 , con- struct t wo attributions that agree on N k : A 1 ≡ 0 , A 2 = 1 { y } . Both v anish on N k (since y / ∈ N k ), so a lo cal op erator must pro duce identical outputs for ev ery pixel in N k . Y et: ˜ A 1 ( x 0 ) = 0 , ˜ A 2 ( x 0 ) = w y = 0 . The attribution at x 0 dep ends on data outside its neighbourho o d, violating (D4). All three violations trace to a single design choice: interp olation reconstructs a spatial signal without reference to attribution seman tics or neigh b ourhoo d structure. Any kernel whose support spans neighbourho o d b oundaries (bilin- ear, bicubic, and all higher-order v ariants used in practice) exhibits all three violations sim ultaneously . A.2 Uniqueness Theorem Pro of Ha ving established that in terpolation structurally violates three desiderata, a natural question arises: do es an y op erator satisfy them all? W e now sho w that, under the standard structural assumption of linearity in mass (the direct spatial analogue of Shapley linearity), the answ er is y es and the solution is unique . The argumen t has t wo conceptual stages: lo calit y induces the Indep endence of Irrele- v ant Alternatives (Lemma 1 ), and monotonicity resolves the resulting functional equation in to a potential (Lemma 2 ). Conserv ation then normalizes the p oten tial in to the ratio form, leaving no remaining degrees of freedom. R e distribution as r ational choic e. Each pixel in a neighbourho od com- p etes for attribution mass based on its segment score. Lo calit y (D4) requires that the relativ e allo cation b et ween any tw o pixels b e indep enden t of what other pixels are present. This is precisely Luce’s Indep endence of Irrelev ant Alternativ es [ 34 ], the foundational axiom of discrete choice theory . F rom I IA, the machinery of functional equations determines the op erator form uniquely . A ttribution Upsampling should Redistribute, Not In terp olate 23 Lemma 1 (I IA from Lo calit y). L et U b e a line ar-in-mass upsampling op er- ator satisfying (D4) lo c ality. F or any neighb ourho o d N k and any x, y ∈ N k , the weight r atio w k ( x ) /w k ( y ) dep ends only on the sc or es s ( σ ( x )) and s ( σ ( y )) , not on the sc or es of other pixels in N k . Pr o of. By (D4), ˜ A ( x ) dep ends only on the mass and segmen t scores within N k . Consider t wo neighbourho ods N k and N k ′ that b oth con tain pixels with segmen t scores s a and s b but differ in their remaining pixels. By lo cality , the ratio w ( s a ) /w ( s b ) must b e iden tical in b oth neighbourho o ds: changing the other pixels (the “irrelev an t alternatives”) cannot affect the relative allocation b et ween s a and s b . I IA is the structural constraint that connects attribution redistribution to classical choice theory . It ensures that adding or removing pixels from a neigh- b ourhoo d changes the absolute share each pixel receiv es (through the normal- ization denominator) but not the relativ e share b et ween an y tw o pixels. F r om indep endenc e to uniqueness. I IA constrains the weigh t ratios severely: the pairwise ratio R ( a, b ) = w ( s a ) /w ( s b ) must satisfy transitivity R ( a, b ) · R ( b, c ) = R ( a, c ) , whic h is the multiplicativ e Cauc hy functional equation. Under monotonicity , only one family of solutions surviv es. Lemma 2 (Poten tial F actorization). L et U b e a line ar-in-mass upsampling op er ator satisfying IIA (L emma 1 ) and (D2) monotonicity. Ther e exists a c ontin- uous, strictly monotone function φ : [0 , 1] → R > 0 such that w k ( x ) ∝ φ ( s ( σ ( x ))) for al l x ∈ N k . Pr o of. Define R ( a, b ) = w ( s a ) /w ( s b ) for score v alues a, b . By Lemma 1 , R is w ell- defined (indep enden t of neigh b ourho od comp osition). IIA implies transitivity: R ( a, b ) · R ( b, c ) = w ( s a ) w ( s b ) · w ( s b ) w ( s c ) = w ( s a ) w ( s c ) = R ( a, c ) . This is the m ultiplicative Cauc hy functional equation. Under con tin uity and strict monotonicit y from (D2), the unique family of solutions is R ( a, b ) = φ ( a ) /φ ( b ) for some contin uous, strictly monotone φ : [0 , 1] → R > 0 . Strict p ositivit y follo ws from the requiremen t that weigh ts b e positive for all score v alues. With the p oten tial in hand, conserv ation selects the unique normalization. Pr o of (Pr o of of The or em 4 ). By linearity in mass, ˜ A ( x ) = M k · w k ( x ) for some w eight function w k . By Lemma 2 , w k ( x ) ∝ φ ( s ( σ ( x ))) . (D1) requires: X x ∈ N k ˜ A ( x ) = M k = ⇒ X x ∈ N k w k ( x ) = 1 . Therefore w k ( x ) = φ ( s ( σ ( x ))) / P y ∈ N k φ ( s ( σ ( y ))) , yielding the ratio form. 24 V. Buono et al. MPS Uniform W. P atc hes P Masks M Samples Ψ Sample ( x ) A ( x ) 224p x 7p x NN Filter A ↑ Pro ject Refined Segm Pixel W eigh ting × × Refined Φ Segmen ter σ 0 σ 1 · · · σ n E xtr actor p 0 p 1 · · · p n m 0 m 1 · · · m n Ev aluator inpain ting strategy inpain ting strategy x 0 · · · x n Neural Net w ork z 0 · · · z n Scoring Metho d Scoring Metho d × s 0 · · · s n Collate Score Matrix Comparator Φ d − 1 Merge s d − 1 s d Φ d − 1 Φ d T rue 3 × 3 D.D. Kernel H-Map Boundary Detection σ 0 · · · σ n S d − 1 x d < D L Fig. 5: Complete USU pip eline. Given input x , the pip eline pro ceeds in three stages. Sc oring (b ottom right): mask ed p erturbation ev aluates segment imp ortance, pro ducing the score matrix Φ . Hier ar chic al r efinement (b ottom left): the depth fusion lo op conv olves Φ with the diagonal difference kernel to compute the H-map, selects heterogeneous segments for re-segmen tation, and merges coarse and fine scores so that segmen t boundaries emerge naturally from the mo del’s own reasoning; con vergence is gov erned by the comparator threshold L . R e distribution (top): the coarse attribu- tion A ( x ) is pro jected onto the refined segmentation and redistributed via pixel-level w eighting with the tensor potential, yielding A ↑ . The three axioms eliminate degrees of freedom in sequence: lo calit y forces I IA (the relative w eight of any t wo pixels is con text-indep enden t), mono- tonicit y resolves the functional equation into a strictly monotone p oten tial, and conserv ation normalizes the result. Sufficiency is therefore accompanied b y uniqueness: no other linear-in-mass architecture satisfies the desiderata. The complete USU pip eline, from coarse masses through p oten tial-weigh ted normalization to redistributed attribution, is illustrated in Figure 5 . A.3 Soft IWMR Prop erties Ha ving established uniqueness for strict conserv ation, we analyze what happ ens when (D1) is in ten tionally relaxed to allo w importance-weigh ted mass redis- tribution across neighbourho ods. The k ey architectural insigh t is that IWMR mo difies only the mass budget assigned to eac h neighbourho o d while retaining A ttribution Upsampling should Redistribute, Not In terp olate 25 USU’s normalized weigh ts unc hanged. This separation determines which guaran- tees survive the relaxation: prop erties that dep end on w eights carry ov er in tact, while prop erties that dep end on per-neighbourho o d mass budgets are either gen- eralized or in tentionally violated. Design principle: r e distribute mass, pr eserve weights. IWMR re- places each neighbourho od’s original mass M k with a redistributed mass ˜ M k = M total · ρ k , where { ρ k } forms a partition of unity weigh ted b y neigh- b ourhoo d imp ortance. The normalized w eights w k ( x ) ∝ φ ( s ( σ ( x ))) remain iden tical to the strict-conserv ation op erator. IWMR and USU therefore dif- fer only in how m uch mass each neigh b ourho od receiv es, not in how that mass is distributed among pixels within it. Theorem 6 (IWMR Prop erties). Soft IWMR with the tensor p otential satisfies: (D1-G) Generalized completeness. P x ∈ N k ˜ A IWMR ( x ) = ˜ M k for al l k ; (D2) Segment monotonicity . Higher sc or es yield higher attributions within e ach neighb ourho o d when ˜ M k ≥ 0 ; (D3) Constant conditioning strength. The shar e d tensor p otential ensur es uniform sc or e sensitivity; (D4 ′ ) Semi-lo calit y . ˜ A IWMR ( x ) is determine d by ˜ M ν ( x ) and se gment sc or es within N ν ( x ) . IWMR intentional ly violates (D1) whenever ˜ M k = M k , which o c curs pr e- cisely when neighb ourho o d imp ortanc es ar e non-uniform. Pr o of (Pr o of of (D1-G)). P x ∈ N k ˜ A IWMR ( x ) = ˜ M k P x ∈ N k w k ( x ) = ˜ M k , since the USU w eights normalize to 1 b y construction. Generalized completeness states that each neighbourho od exhausts its redis- tributed budget exactly . The shift from M k to ˜ M k replaces p er-neigh b ourhoo d b ookkeeping with a global reallo cation, but the accounting within each neigh- b ourhoo d remains exact. Pr o of (Pr o of of (D2)). Within N k , the weigh ts w k ( x ) ∝ φ ( s ( σ ( x ))) are monotone in score since φ is strictly increasing. When ˜ M k ≥ 0 , ˜ A IWMR ( x ) = ˜ M k · w k ( x ) preserv es the ordering. Monotonicit y surviv es because it is a prop erty of the normalized w eights, whic h IWMR inherits from USU without mo dification. The redistributed mass ˜ M k acts as a non-negativ e scalar that preserves the w eight ordering. Pr o of (Pr o of of (D3)). The tensor p otential satisfies φ ( s + ∆ ) /φ ( s ) = exp( ∆/ε ) , indep enden t of s (Section A.4 ). Since IWMR uses the same p oten tial, condition- ing strength is constan t. 26 V. Buono et al. F r om strict lo c ality to semi-lo c ality. The three properties ab o ve depend only on the w eights within each neigh- b ourhoo d, so they carry ov er from USU unchanged. Semi-lo cality is where the architectural separation becomes visible: the redistributed mass ˜ M k de- p ends on all neighbourho od importances through ρ k , injecting a controlled global dep endency in to an otherwise lo cal computation. Pr o of (Pr o of of (D4 ′ )). Giv en ˜ M k and the segmen t scores within N k , ˜ A IWMR ( x ) = ˜ M k · w k ( x ) dep ends on no other data. The distinction from strict (D4) is that ˜ M k itself dep ends on global importance through ρ k . Pr o of (Pr o of of (D1) violation). When imp ortances are non-uniform, the redis- tribution weigh ts ρ k reflect imp ortance rather than original mass prop ortions, so ˜ M k = M total · ρ k = M k in general. The violation is precisely the mec hanism by which mass flows to ward imp or- tan t neigh b ourhoo ds. What strict conserv ation loses lo cally , IWMR preserv es globally . Corollary 2 (Global Conserv ation and Zero-Sum Flow). Sinc e { ρ k } forms a p artition of unity, IWMR pr eserves total mass: P k ˜ M k = M total . Mass flows ar e zer o-sum: P k ( ˜ M k − M k ) = 0 . Pr o of. P k ˜ M k = M total P k ρ k = M total . Subtracting original masses: P k ( ˜ M k − M k ) = M total − M total = 0 . The weigh t-preserv ation arc hitecture of IWMR pro duces a clean separation of concerns: within-neighbourho od guarantees (monotonicit y , conditioning strength, generalized completeness) are inherited from USU intact, while p er-neigh b ourhoo d mass budgets are globally reallo cated via the partition of unity . Lo cality w eakens to semi-locality at a single, iden tifiable p oin t: the dep endence of ˜ M k on global imp ortance. T otal mass is conserved; only its distribution across neigh b ourho ods changes. A.4 Score Poten tial Analysis The uniqueness theorem (Theorem 4 ) establishes that any compliant op erator tak es the ratio form w k ( x ) ∝ φ ( s ( σ ( x ))) for some strictly monotone p otential φ , satisfying (D1), (D2), and (D4) simultaneously . The p oten tial itself remains a free parameter: every strictly monotone, p ositiv e φ yields a v alid op erator. (D3), constan t conditioning strength, is the final selection criterion. It requires that the multiplicativ e effect of a score gap ∆ b e uniform across the score range, so that the operator treats equal score differences identically regardless of absolute lev el. W e now show that this requirement uniquely selects the exponential family . A ttribution Upsampling should Redistribute, Not In terp olate 27 Sele ction principle: sc or e-uniform sensitivity. (D3) demands φ ( s + ∆ ) /φ ( s ) = g ( ∆ ) for some function g indep enden t of s . In log space, this b ecomes log φ ( s + ∆ ) − log φ ( s ) = h ( ∆ ) : the increments of log φ must dep end only on the step size, not on the starting point. This is the addi- tiv e Cauc hy functional equation, whose con tinuous solutions are precisely the affine functions f ( s ) = cs + d . Any p oten tial with non-affine logarithm violates (D3). Prop osition 1 (Po wer-la w p oten tials violate (D3)). F or φ ( s ) = s γ with γ > 0 , the c onditioning r atio dep ends on s . Pr o of. φ ( s + ∆ ) /φ ( s ) = (( s + ∆ ) /s ) γ , whic h v aries with s . Equiv alen tly , log φ ( s ) = γ log s is not affine. Prop osition 2 (Log-o dds potentials violate (D3)). F or φ ( s ) = ( s/ (1 − s )) γ with γ > 0 , the c onditioning r atio dep ends on s . Pr o of. φ ( s + ∆ ) /φ ( s ) = ( s + ∆ )(1 − s ) (1 − s − ∆ ) s γ , a rational function of s . Equiv alently , log φ ( s ) = γ [log s − log(1 − s )] is not affine. The pattern is the same in b oth cases: a non-affine logarithm pro duces score- dep enden t sensitivit y , amplifying redistribution in some score ranges while sup- pressing it in others. Since log φ must b e affine and φ must b e strictly monotone and p ositiv e, the unique surviving family is φ ( s ) = C e s/ε for C > 0 and ε > 0 , where C cancels in the ratio form and the shift by 0 . 5 is a cen tering con ven tion. Theorem 7 (T ensor p oten tial uniquely satisfies (D3)). A mong c on- tinuous, strictly monotone p otentials, φ ( s ) = exp(( s − 0 . 5) /ε ) is the unique family satisfying c onstant c onditioning str ength: φ ( s + ∆ ) φ ( s ) = exp ∆ ε , indep endent of s . The temp er atur e ε > 0 c ontr ols r e distribution sharpness. Pr o of. (D3) requires φ ( s + ∆ ) /φ ( s ) = g ( ∆ ) . Setting f = log φ , this becomes f ( s + ∆ ) − f ( s ) = h ( ∆ ) , the additiv e Cauc hy equation. Under contin uity , f ( s ) = cs + d for constan ts c, d , yielding φ ( s ) = e cs + d = C e s/ε with ε = 1 /c > 0 (strict monotonicity requires c > 0 ). Direct verification: φ ( s + ∆ ) /φ ( s ) = e c∆ = exp( ∆/ε ) . 28 V. Buono et al. Op er ational c onse quenc e. Violating (D3) introduces sc or e-dep endent r e- distribution sensitivity : for φ ( s ) = s 2 , a gap of ∆ = 0 . 1 amplifies the weigh t ratio by ≈ 1 . 27 near s = 0 . 8 but by 4 . 0 near s = 0 . 1 , o ver 3 × the sensitiv- it y . The tensor potential eliminates this non-uniformit y . Practitioners may nonetheless prefer alternativ e p oten tials when score distributions cluster in a kno wn range; the ratio form retains (D1), (D2), and (D4) guarantees for an y strictly monotone φ . A.5 USU Desiderata V erification The interpolation violation pro ofs (Section A.1 ) established that seman tic blind- ness, mass leak age, and non-local contamination are structural consequences of the interpolation paradigm. W e now verify that USU’s ratio form resolves all three violations and, with the tensor p oten tial, satisfies all four desiderata si- m ultaneously . Design principle: Sc or e-awar e mass r e distribution. USU replaces in terp olation’s fixed spatial kernel with normalized w eights w k ( x ) = φ ( s ( σ ( x ))) / P y ∈ N k φ ( s ( σ ( y ))) that enco de the mo del’s reasoning and re- sp ect the neigh b ourhoo d partition b y construction. Three algebraic prop- erties of these weigh ts (they sum to one, they inherit the p oten tial’s mono- tonicit y , and they depend only on local data) directly resolve the three structural failures. Pr o of (Pr o of of The or em 5 (D1): Neighb ourho o d Completeness). X x ∈ N k ˜ A ( x ) = X x ∈ N k M k · w k ( x ) = M k X x ∈ N k φ ( s ( σ ( x ))) P y ∈ N k φ ( s ( σ ( y ))) = M k · 1 = M k . Where in terp olation leaks mass across neigh b ourhoo d boundaries through its spatially extended kernel, the normalized weigh ts confine redistribution en tirely within eac h neighbourho o d. The denominator sums ov er N k alone, so every unit of M k is redistributed to pixels in N k and no where else. Pr o of (Pr o of of The or em 5 (D2): Se gment Monotonicity). F or x, y ∈ N k with s ( σ ( x )) ≥ s ( σ ( y )) : since the exponential is strictly increasing, φ ( s ( σ ( x ))) ≥ φ ( s ( σ ( y ))) , hence w k ( x ) ≥ w k ( y ) . When M k ≥ 0 , ˜ A ( x ) = M k · w k ( x ) ≥ M k · w k ( y ) = ˜ A ( y ) . Monotonicit y is the direct resolution of semantic blindness: the p oten tial φ translates the mo del’s segment scores into weigh t ordering, ensuring that higher- scored regions receive prop ortionally more attribution. Where interpolation ig- nores scores en tirely , USU makes them the sole determinan t of within-neigh b ourho od allo cation. A ttribution Upsampling should Redistribute, Not In terp olate 29 Pr o of (Pr o of of The or em 5 (D4): L o c ality). By construction, ˜ A ( x ) = M ν ( x ) · w ν ( x ) ( x ) where M ν ( x ) = P y ∈ N ν ( x ) A ( y ) and w ν ( x ) ( x ) dep ends only on segment scores within N ν ( x ) . No information from other neigh b ourho ods is required. Calibr ation: the final de gr e e of fr e e dom. (D1), (D2), and (D4) hold for any strictly monotone p oten tial φ . The re- maining freedom, the c hoice of φ within the monotone family , is resolv ed by (D3), which demands score-uniform sensitivity . As shown in Section A.4 , only the exp onen tial family satisfies this requiremen t. Pr o of (Pr o of of The or em 5 (D3): Constant Conditioning Str ength). V erified in Section A.4 : φ ( s + ∆ ) /φ ( s ) = exp( ∆/ε ) , indep enden t of s . USU’s normalized w eights resolv e the three structural failures of in terpo- lation in exact corresp ondence: weigh t normalization eliminates mass leak- age (D1), p oten tial monotonicity incorp orates score semantics (D2), and neigh b ourho od-lo cal computation preven ts non-local con tamination (D4). The tensor p oten tial then selects uniform sensitivity across the score range (D3). T ogether, the four prop erties confirm that USU is a complete remedy for the in terp olation paradigm’s incompatibilities with faithful attri- bution upsampling. B Extended Theoretical Con text The main pap er in tro duces USU’s desiderata and deriv es the ratio form; here we situate this contribution within the broader landscap e of axiomatic attribution theory , resolution gaps in existing metho ds, and the choice-theoretic functional equations that underpin the uniqueness argumen t. B.1 Axiomatic Attribution Theory USU extends the axiomatic tradition of feature attribution to the upsampling domain. In the Shapley framework, the efficiency axiom requires that play er con- tributions sum to the coalition v alue [ 35 ]; in Integrated Gradients, c ompleteness requires that attributions sum to the prediction difference [ 61 ]. Desideratum (D1), neigh bourho o d completeness, is the spatial analogue: pixel attributions within eac h neighbourho o d m ust sum to the neigh b ourho od mass. While Shap- ley efficiency and IG c ompleteness op erate on feature-level or path-in tegral at- tributions, (D1) op erates on spatial redistribution, ensuring that the upsampling step do es not in tro duce or destro y attribution mass. Domain-sp ecific axiomatization is required by the imp ossibility results that follo w. Bilo deau et al . [ 5 ] establish imp ossibilit y results showing that no single attribution method can sim ultaneously satisfy all desirable prop erties in full generalit y; different domains require tailored axiom sets. USU addresses this by restricting scop e to upsampling, a well-defined subproblem where a complete, satisfiable axiomatization is ac hiev able. 30 V. Buono et al. B.2 Resolution Gaps in A ttribution Metho ds The resolution gap betw een mo del reasoning and explanation granularit y arises from distinct architectural sources. F or CAM-family metho ds, attributions are defined on the final conv olutional feature map (t ypically 7 × 7 or 14 × 14 ) and upsampled to input resolution. F or Vision T ransformers, patch tokenization (t ypically 16 × 16 ) creates attributions at patch granularit y . P erturbation-based metho ds (RISE, SHAP) operate on coarse masks or sup erpixels, inheriting their resolution. All existing refinement strategies for closing this gap, including multi-la yer CAM fusion (La yerCAM, CAMERAS), augmen tation-based approaches (Aug- men ted Grad-CAM), and propagation schemes, are heuristic: none formally char- acterizes what faithful up sampling requires. A multi-la y er fusion approac h may sharp en boundaries but cannot state, let alone guaran tee, the properties an upsampling operator should satisfy . Crucially , these strategies are integral com- p onen ts of sp ecific XAI metho ds, not standalone op erators. USU fills this gap on t wo levels: it provides the first axiomatic framew ork defining what faithful attri- bution upsampling means (conserv ation, monotonicit y , calibration, lo calit y), and it delivers a metho d-agnostic op erator, composable with any coarse attribution metho d, that prov ably satisfies all four desiderata, verified to 10 − 7 n umerical precision (T able 2 in the main paper). B.3 Choice Theory and F unctional Equations The uniqueness pro of (Theorem 4 ) draws on a deep connection to discrete choice theory that deserves explicit elab oration. Luce’s Choice Axiom [ 34 ] states that the relativ e probability of c ho osing alternativ e a ov er b is indep enden t of what other alternativ es are av ailable, precisely the I IA (Indep endence of Irrelev ant Al- ternativ es) prop ert y that (D4) lo calit y induces in USU’s weigh t ratios. McF ad- den’s conditional logit [ 39 ] shows that I IA com bined with regularit y conditions yields the multinomial logit form P ( a | B ) ∝ exp( θ · a ) . Breitmoser [ 6 ] estab- lishes that I IA, p ositivit y , and translation inv ariance on attributes are necessary and sufficien t for conditional logit, which is precisely USU’s ratio form with the tensor p otential. The additional constant-conditioning requirement (D3) then selects the exp onen tial p otential via the additive Cauc hy functional equation, paralleling ho w translation inv ariance selects the exp onen tial in choice theory . USU’s redistribution problem is a discrete c hoice problem. Each pixel in a neigh b ourho od “competes” for attribution mass based on its segmen t score, and the desiderata enco de the same rationalit y conditions (consistency via I IA/locality , efficiency via conserv ation, and sensitivity via monotonicity) that characterize rational sto c hastic c hoice [ 7 , 53 ]. C Emergen t Boundaries from Score Heterogeneity Section A assumed a fixed segmentation partition. In practice, no single seg- men tation scale suffices: coarse partitions group semantically distinct regions, A ttribution Upsampling should Redistribute, Not In terp olate 31 ... ... Fig. 6: Hierarchical b oundary refinemen t. At each depth lev el, the score matrix Φ d captures p er-segmen t importance, the H-map detects score transitions at segment b oundaries, and the adaptiv e merge combines coarse and fine attributions. Only bound- ary segments (high | H map | ) are refined further, analogous to splitting impure nodes in a decision tree (T able 4 ). while fine partitions fragment coherent ones. This section formalizes how score heterogeneit y itself selects b oundary resolution, illustrated in Figure 6 . The ratio form (Section 3.4 ) determines how mass is allocated within each neigh b ourho od, but the segmentation partition S has so far b een assumed, not deriv ed. F or faithful explanations, b oundaries m ust emerge from the mo del’s own reasoning, refined where scores transition and left coarse where scores are ho- mogeneous. No single segmentation scale achiev es this: a coarse partition groups seman tically distinct regions; a fine partition fragments coheren t ones. The key insigh t is to let sc or e heter o geneity itself select b oundary resolution. W e now formalize the refinement pip eline, from geometric primitives through adaptive b oundary selection to the capstone guaran tee: total attribution mass is preserved through the full depth recursion. Definition 1 (Hierarchical Segmentation). A hierarc hical segmentation of depth D is a family {S 0 , . . . , S D − 1 } of p artitions of Ω with P 0 ≤ · · · ≤ P D − 1 se gments, satisfying the r efinement pr e dic ate: every se gment at depth d +1 is c ontaine d in some se gment at depth d . R efinement is r eflexive and tr ansitive. 32 V. Buono et al. Giv en depth-indexed scores s d : { 0 , . . . , P d − 1 } → [0 , 1] , the sc or e matrix at depth d maps eac h pixel to the score of its containing segmen t: Φ d ( x ) = s d ( σ d ( x )) . (15) Dete cting imp ortanc e tr ansitions. Conv olving Φ d with a 3 × 3 diagonal difference k ernel K DD yields the H-map : H map ( x ) = ( Φ d ∗ K DD )( x ) , (16) measuring lo cal score heterogeneity . When Φ d is constant in the 3 × 3 neighbour- ho od of an interior pixel, H map ( x ) = 0 : no finer b oundary is needed. Segments whose maximum | H map | exceeds threshold θ > 0 are b oundary se gments and are refined at the next depth; homogeneous segments are retained. Lo wering θ w eakly increases the b oundary set (monotonicit y; Prop osition 5 ). A daptive depth fusion. A sigmoid-based mixing co efficien t α ( x ) , monotonically decreasing in | H map ( x ) | , blends coarse and fine depths: near b oundaries ( | H map | ≫ µ ), fine scores dominate; aw ay from them, coarse scores are retained. The conv ex com bination preserv es [0 , 1] b oundedness. Recursion terminates when successiv e score matrices conv erge in F rob enius norm. Since each recursion step applies USU (Theorem 5 ), neigh b ourhoo d completeness propagates inductively and the full pip eline preserv es total attribution mass (Theorem 8 ). The remainder of this section formalizes each comp onen t of the hierarc hi- cal refinement pipeline. W e b egin with the geometric foundations for b oundary detection (Section C.1 ), then formalize the H-map that detects score transi- tions (Section C.2 ), the boundary op erator that selects segments for refinemen t (Section C.3 ), the stopping criterion (Section C.4 ), the adaptive mixing co effi- cien t that blends coarse and fine depths (Section C.5 ), the merge op erator (Sec- tion C.6 ), and finally the depth recursion with its mass conserv ation guarantee (Section C.7 ). Dete ction principle: sc or e heter o geneity as b oundary signal. The H-map, obtained b y conv olving the score matrix with a diagonal difference k ernel, driv es b oth b oundary detection and adaptive depth mixing. Where scores are locally constan t, the H-map v anishes (Proposition 4 ) and no finer resolution is needed; at segment b oundaries with differing scores, the H-map registers the transition and triggers refinemen t at the next depth. This dichotom y propagates through the pip eline: it determines which seg- men ts split, how mixing co efficients weigh t coarse against fine depths, and ultimately when refinemen t conv erges. C.1 Boundary Definitions The geometric primitives b elo w formalize what it means for segments to share a boundary , analogous to defining adjacency betw een no des in the decision-tree analogy (T able 4 ). A ttribution Upsampling should Redistribute, Not In terp olate 33 T able 4: Decision-tree analogy . Each stage of USU’s hierarchical refinement mir- rors a decision-tree op eration, with a corresp onding formal guarantee verified in this supplemen t. Decision T ree USU Refinemen t F ormal Guarantee Ro ot no de Coarsest partition S 0 o ver Ω P artitions pixel grid; refinemen t is reflexive and transitiv e (Definition 1 ) No de impurity Score heterogeneit y max x ∈ σ p | H map ( x ) | Linear in Φ d ; zero on constant regions (Prop ositions 3 and 4 ) Split criterion Boundary threshold | H map | > θ Monotone in θ : lo wering θ w eakly increases b oundary set (Prop osition 5 ) Child no des Finer sub-segments σ d +1 q ⊆ σ d p Refinemen t predicate: every c hild con tained in parent (Definition 1 ) Leaf v alue Merged score Φ merged ( x ) via adaptiv e α ( x ) Con vex combination; b ounded in [0 , 1] ; iden tity on equal inputs (Prop ositions 8 to 10 ) Stopping rule ∥ Φ d − Φ d − 1 ∥ F ≤ L or d = D Symmetric and self-terminating (Prop ositions 6 and 7 ) Prediction F used attribution ˜ A ( x ) T otal mass conserved through full recursion (Theorem 8 ) Definition 2 (Pixel Adjacency). Pixels x, y ∈ Ω ar e adjacent iff ∥ x − y ∥ ∞ = 1 , wher e ∥ x − y ∥ ∞ = max( | x 1 − y 1 | , | x 2 − y 2 | ) (8-c onne ctivity). A djac ency is symmetric and irr eflexive. Definition 3 (Segment Boundary). The b oundary of se gment σ p is ∂ σ p = { x ∈ σ p : ∃ y / ∈ σ p , ∥ x − y ∥ ∞ = 1 } . The in terior is σ p \ ∂ σ p ; b oundary and interior p artition the se gment: σ p = ∂ σ p ∪ ( σ p \ ∂ σ p ) . Definition 4 (Inter-Segmen t Boundary). The in ter-segment b oundary b e- twe en σ p and σ q is ∂ ( σ p , σ q ) = { ( x, y ) : x ∈ σ p , y ∈ σ q , ∥ x − y ∥ ∞ = 1 } . This r elation is symmetric: ( x, y ) ∈ ∂ ( σ p , σ q ) iff ( y , x ) ∈ ∂ ( σ q , σ p ) . These geometric primitiv es formalize the spatial relations that the H-map prob es: boundary detection reduces to testing whether adjacen t pixels carry differen t segment scores, a relation fully characterized b y pixel adjacency and segmen t membership. 34 V. Buono et al. C.2 H-Map Prop erties The H-map pla ys the role of the impurit y measure in the decision-tree analogy: it quan tifies lo cal score heterogeneit y , determining which segments require finer partitioning. Prop osition 3 (Linearity). The H-map is line ar: H map ( Φ 1 + Φ 2 ) = H map ( Φ 1 )+ H map ( Φ 2 ) and H map ( r · Φ ) = r · H map ( Φ ) for r ∈ R . Pr o of. Linearity of 2D conv olution: ( f + g ) ∗ K = f ∗ K + g ∗ K and ( r f ) ∗ K = r ( f ∗ K ) . Prop osition 4 (Zero on Constant Regions). F or an interior pixel x (al l c orners of its 3 × 3 window lie in Ω ), if Φ d is c onstant on the 3 × 3 neighb ourho o d, then H map ( x ) = 0 . Pr o of. If Φ d ( y ) = c for all y with ∥ x − y ∥ ∞ ≤ 1 , then H map ( x ) = c P i,j K DD [ i, j ] = c ( − 1 + 0 + 1 + 0 + 0 + 0 + 1 + 0 − 1) = 0 . T ogether, linearity and the zero-on-constant property establish the H-map as a selective heterogeneity detector: it resp onds to gen uine score transitions, not to uniform shifts in the score field. This selectivit y is what allows the b oundary op erator to distinguish segmen ts that genuinely require refinement from those that are merely high- or lo w-scored. F r om dete ction to adaptive p artitioning. The H-map pro vides a con tin uous heterogeneity signal at every pixel. T w o discrete decisions remain: which segments to refine (the b oundary op era- tor’s threshold test) and when to stop refining (the comparator’s con ver- gence criterion). Both decisions inherit the H-map’s selectivity: only gen uine score transitions trigger further partitioning. C.3 Boundary Op erator The boundary operator implemen ts the split criterion: it partitions segmen ts in to those requiring refinement (high impurit y) and those retained at the curren t depth (homogeneous). Definition 5 (Boundary Op erator). A se gment σ d p is a boundary segment iff max x ∈ σ d p | H map ( x ) | > θ for thr eshold θ > 0 . The b oundary set is B ( H map ) = { σ d p : max x ∈ σ d p | H map ( x ) | > θ } . Non-b oundary se gments ar e r etaine d at the cur- r ent depth; b oundary se gments ar e r efine d at depth d +1 . Prop osition 5 (Monotonicity in Threshold). F or thr esholds θ 1 ≤ θ 2 , B θ 2 ( H map ) ⊆ B θ 1 ( H map ) . Pr o of. If max x ∈ σ p | H map ( x ) | > θ 2 ≥ θ 1 , then σ p ∈ B θ 1 . A ttribution Upsampling should Redistribute, Not In terp olate 35 Monotonicit y in threshold gives practitioners a single interpretable con trol: lo wering θ w eakly increases the b oundary set, pro ducing finer partitions at the cost of additional computation. As θ → 0 + , every segment with nonzero score v ariation is refined; as θ → ∞ , no segment is refined and the coarsest partition is retained. C.4 Comparator Prop erties The stopping rule determines when further refinement yields diminishing returns, analogous to pruning in decision trees. Stopping criterion. Recursion terminates when score matrices stabilize. The glob al c omp ar ator C ( Φ d , Φ d − 1 ) = 1 [ ∥ Φ d − Φ d − 1 ∥ F > L ] returns F alse when refinemen t has conv erged ( L > 0 ). Prop osition 6. The glob al c omp ar ator is symmetric: C ( Φ d , Φ d − 1 ) = C ( Φ d − 1 , Φ d ) . Pr o of. ∥ Φ d − Φ d − 1 ∥ F = ∥ Φ d − 1 − Φ d ∥ F b y ∥− v ∥ = ∥ v ∥ . Prop osition 7. C ( Φ, Φ ) = F alse for any sc or e matrix Φ . Pr o of. ∥ Φ − Φ ∥ F = 0 > L since L > 0 . Symmetry ensures the stopping criterion is direction-indep enden t, while self- termination guaran tees that recursion halts once the score matrix stabilizes, pro viding a natural conv ergence condition without requiring an external depth budget. C.5 A daptive Mixing Co efficient Rather than a hard split b et ween coarse and fine depths, the adaptive mixing co efficien t pro vides a smo oth transition con trolled by local b oundary strength. The adaptive mixing c o efficient α ( x ) = σ − ( | H map ( x ) | − µ ) τ , (17) with cen tering µ and temp erature τ > 0 , satisfies: 1. α ( x ) ∈ (0 , 1) for all x (sigmoid range on R ). 2. α is strictly decreasing in | H map ( x ) | : higher b oundary strength yields low er α (fav ouring finer depth). 3. When | H map ( x ) | = µ : α ( x ) = 1 / 2 (equal weigh ting). 4. When | H map ( x ) | > µ + 5 τ : α ( x ) < 0 . 01 (fine depth dominates). 5. When | H map ( x ) | < µ − 5 τ : α ( x ) > 0 . 99 (coarse depth dominates). 36 V. Buono et al. C.6 Merge Op erator The merge op erator combines the leaf v alues from adjacent depth levels, pro- ducing the fused score matrix that driv es the final attribution. The merged score matrix blends coarse and fine depth levels: Φ merged ( x ) = α ( x ) · Φ d − 1 ( x ) + (1 − α ( x )) · Φ d ( x ) . (18) Near b oundaries ( | H map | ≫ µ ), α ≈ 0 and finer scores dominate; a wa y from b oundaries ( | H map | ≪ µ ), α ≈ 1 and coarser scores are retained. Prop osition 8 (Conv ex Combination). Sinc e α ( x ) ∈ (0 , 1) and 1 − α ( x ) ∈ (0 , 1) with α ( x ) + (1 − α ( x )) = 1 , the mer ge Φ merged ( x ) = α ( x ) Φ d − 1 ( x ) + (1 − α ( x )) Φ d ( x ) is a c onvex c ombination. Prop osition 9 (Boundedness). If Φ d − 1 ( x ) , Φ d ( x ) ∈ [0 , 1] for al l x , then Φ merged ( x ) ∈ [0 , 1] . Pr o of. Φ merged ( x ) = αΦ d − 1 + (1 − α ) Φ d ≤ α + (1 − α ) = 1 and ≥ 0 . Prop osition 10 (Identit y on Equal Inputs). When Φ d − 1 = Φ d = Φ : Φ merged ( x ) = αΦ ( x ) + (1 − α ) Φ ( x ) = Φ ( x ) . Con vex combination guaran tees that merged scores lie b et ween their coarse and fine inputs. Boundedness preserves the [0 , 1] score range through successiv e depth levels. Iden tit y on equal inputs ensures that homogeneous regions, where coarse and fine partitions agree, pass through the merge unc hanged. T ogether, these prop erties ensure that the merge op erator adds no distortion to the score field. C.7 Depth Recursion and Mass Conserv ation Eac h comp onen t formalized ab o ve con tributes a local guarantee: the H-map resp onds only to gen uine transitions, the b oundary op erator is monotone in threshold, and the merge operator preserv es b oundedness. The capstone result assem bles these lo cal guaran tees into a global one: total attribution mass is conserv ed through the full depth recursion, regardless of ho w man y lev els of refinemen t are applied. Definition 6 (Depth Recursion). The depth state at level d is the triple ( S d , s d , A d ) : p artition, sc or es, and attribution. The recursion operator R ad- vanc es state fr om depth d to d +1 by c omputing new sc or es, dete cting b oundaries via the H-map, mer ging sc or e matric es, and applying USU within the finer p ar- tition. The full pip eline iter ates R fr om depth 0 to D − 1 , yielding the fuse d attribution ˜ A . Theorem 8 (Mass Conserv ation Through Recursion). The ful l hier ar- chic al pip eline pr eserves total attribution mass: P x ∈ Ω ˜ A ( x ) = P x ∈ Ω A 0 ( x ) . A ttribution Upsampling should Redistribute, Not In terp olate 37 α -patch F alse p ositive Commission Patc h (Type I) β -patc h F alse ne gative Omission Patc h (Type I I) Fig. 7: Compression error types. F rom top to b ottom: ground-truth attribution, input image, upsampled saliency map, and raw low-resolution heatmap. Left column sho ws β -errors where true attributions disapp ear due to compression (signal loss). Righ t column shows α -errors where spurious attributions emerge despite absence in ground truth (false signal generation). Both error t yp es corrupt explanation fidelit y . Pr o of. By induction on depth d . Base case ( d = 0 ). The initial attribution A 0 has mass M = P x ∈ Ω A 0 ( x ) . Inductiv e step. Supp ose P x ∈ Ω A d ( x ) = M . The recursion op erator R ap- plies USU within eac h neigh bourho o d of the finer partition S d +1 . By Theo- rem 5 (D1), neighbourho o d completeness holds: P x ∈ N k A d +1 ( x ) = M d +1 k for eac h neighbourho o d k . Since the neighbourho o ds partition Ω : X x ∈ Ω A d +1 ( x ) = X k X x ∈ N k A d +1 ( x ) = X k M d +1 k = M . The merge op erator preserves mass through conv ex combination: α ( x ) + (1 − α ( x )) = 1 ensures the weigh ted sum is unchanged. By induction, P x ∈ Ω ˜ A ( x ) = M . Hierarc hical refinemen t adds no new free parameters to the ratio form; it selects resolution adaptively from the mo del’s own score field. The pip eline preserv es all four desiderata through recursion: completeness by the induc- tiv e mass conserv ation argument, monotonicity and calibration through the unc hanged p oten tial weigh ts, and lo calit y within each depth level’s partition. The only new controls, the threshold θ and tolerance L , gov ern resolution depth, not attribution seman tics. 38 V. Buono et al. D Error Analysis Ha ving formalized the theoretical guaran tees (Section A ) and the m ulti-scale mec hanism that makes them practical (Section C ), we now analyze how these guaran tees translate into concrete error reduction at the pixel lev el. Giv en ground-truth attribution A ∗ : Ω → R , the α -error (spurious attribu- tion) and β -error (signal loss) at pixel x are defined as: α ( x ) = max 0 , | ˜ A ( x ) | − | A ∗ ( x ) | , (19) β ( x ) = max 0 , | A ∗ ( x ) | − | ˜ A ( x ) | . (20) R o ot c ause: L ossy c ompr ession. Compressing pixel-level attribution to coarse neighbourho o d aggregates and reconstructing it is inherently lossy . T w o complemen tary error modes arise from this compression: α -errors (spu- rious signal) where reconstruction ov ersho ots ground truth, and β -errors (signal loss) where it undersho ots. These mo des are m utually exclusive at eac h pixel, and their aggregate behaviour at the neigh bourho o d lev el is go verned b y mass balance. Prop osition 11 (Error Exclusivity). At e ach pixel x , at most one of α ( x ) , β ( x ) is p ositive. Their sum c aptur es the total magnitude mismatch: α ( x ) + β ( x ) = | ˜ A ( x ) | − | A ∗ ( x ) | . (21) Pr o of. Let δ = | ˜ A ( x ) | − | A ∗ ( x ) | . When δ ≥ 0 : α ( x ) = δ and β ( x ) = 0 . Whe n δ < 0 : α ( x ) = 0 and β ( x ) = − δ . In b oth cases α ( x ) + β ( x ) = | δ | . Exclusivit y ensures the error at each pixel is unambiguous: reconstruction either ov ersho ots or undersho ots, never b oth. This p oin twise decomp osition pro- vides a complete accoun ting of attribution error (Figure 7 ). The question is what structural prop ert y of an upsampling op erator controls these errors at the neigh b ourho od level. Mass imb alanc e as err or lower b ound. Define the mass deficit ∆ − k = max 0 , P x ∈ N k A ∗ ( x ) − P x ∈ N k ˜ A ( x ) and mass exc ess ∆ + k = max 0 , P x ∈ N k ˜ A ( x ) − P x ∈ N k A ∗ ( x ) . Mass excess forces α -error; mass deficit forces β -error. Prop osition 12 (Mass–Error Bounds). F or non-ne gative attributions within neighb ourho o d N k : X x ∈ N k α ( x ) ≥ ∆ + k , X x ∈ N k β ( x ) ≥ ∆ − k . A ttribution Upsampling should Redistribute, Not In terp olate 39 Pr o of. W e sho w the α bound; the β b ound is symmetric. With non-negative attributions, | ˜ A ( x ) | = ˜ A ( x ) and | A ∗ ( x ) | = A ∗ ( x ) . Since α ( x ) = max(0 , ˜ A ( x ) − A ∗ ( x )) ≥ ˜ A ( x ) − A ∗ ( x ) , summing o ver N k giv es P x ∈ N k α ( x ) ≥ P x ∈ N k ˜ A ( x ) − P x ∈ N k A ∗ ( x ) . Since each α ( x ) ≥ 0 , the left-hand side is non-negativ e. Com bining P α ( x ) ≥ 0 with the summation b ound giv es P α ( x ) ≥ max 0 , P ˜ A ( x ) − P A ∗ ( x ) = ∆ + k . Mass imbalance is therefore a structural low er b ound on attribution error. An y op erator that violates mass conserv ation (D1) is committed to nonzero α - or β -error for some input. USU Err or Minimization. (D1) ensures zero net mass error p er neighbour- ho od when the coarse attribution faithfully aggregates ground truth. If M k = P x ∈ N k A ∗ ( x ) , then: X x ∈ N k ˜ A ( x ) = M k = X x ∈ N k A ∗ ( x ) , so ∆ − k = ∆ + k = 0 : the mass-error low er b ounds v anish, and USU achiev es the tigh test p ossible mass-lev el guarantee against both error types. Conv ersely , an y op erator that do es not satisfy (D1) admits an input configuration with ∆ − k > 0 or ∆ + k > 0 , and hence p ositiv e neighbourho o d-lev el α - or β -error. Figure 3 in the main paper illustrates this concretely: interpolation pro duces identical saliency maps for inputs with distinct ground truths, a failure that mass-conserving op- erators a void b y construction. The α / β -decomp osition yields three structural guarantees: exclusivity par- titions pixel error in to a single mo de, the mass-error b ounds establish that mass im balance is a structural lo w er bound on neigh b ourhoo d error, and (D1) is the unique desideratum that zero es b oth b ounds. USU therefore pro- vides the strongest mass-lev el error guarantee av ailable within the axiomatic framew ork. 40 V. Buono et al. (ours) USU-IWMR (ours) USU-IWMR e ( x ) Ground T r uth p erio dic-t 224p x 224p x 7p x e ( x ) Ground T r uth concw a v e 224p x 224p x 7p x ↑ Syn thethic ↑ Syn thethic ↓ in the wild e ( x ) Ground T r uth c hi c k adee N//A 224p x 224p x 7p x e ( x ) Ground T ruth som brero N//A 224p x 224p x 7p x e ( x ) Ground T ruth trailer truc k N//A 224p x 224p x 7p x e ( x ) Ground T ruth stop w atc h N//A 224p x 224p x 7p x Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Fig. 8: Extended qualitative comparison. Synthetic patterns with known ground truth (top) and ImageNet samples with GradCAM from VGG16 (b ottom). Interpo- lation baselines exhibit b oundary bleeding and ringing; USU-IWMR recov ers ground- truth support on syn thetic data and concentrates attribution within seman tic regions on real images. E Syn thetic Experiment Details The preceding sections established theoretical guaran tees and error analysis. W e no w describe the con trolled experimental setup designed to v erify these guaran- tees empirically , with kno wn ground-truth attribution priors that enable direct measuremen t of reconstruction fidelity . Shap e classific ation. W e generate 2,000 single-c hannel 224 × 224 gra yscale images con taining a single centered shap e (circle, triangle, or square) with class-balanced sampling. The dataset is split 70/15/15 in to train/v alidation/test sets. Ground- truth attribution masks are the binary foreground regions. A ttribution Upsampling should Redistribute, Not In terp olate 41 Pattern dete ction. Five p eriodic pattern types (zigzag, sine, spiral, concentric w av e, moiré) are rendered on 224 × 224 images. This task is used for qualitative ev aluation of b oundary preserv ation. Mo del ar chite ctur es. The CNN consists of three conv olutional blo cks ( 5 × 5 ker- nels, 16 → 32 → 64 channels, each follo wed by ReLU and 2 × 2 max-p ooling), adap- tiv e av erage p ooling to 4 × 4 , and a tw o-la yer MLP ( 1024 → 128 → 3 ). The MLP flattens the input to 50 , 176 dimensions with hidden la yers [256 , 64] and 3-class output. RRL loss. The Right for the Righ t Reasons [ 50 ] loss adds a p enalt y on back- ground attribution: L RRL = L CE + λ X x / ∈ FG | A ( x ) | 2 , (22) where FG is the ground-truth foreground mask and λ = 0 . 1 . This constrains the mo del to attend exclusiv ely to foreground pixels. Concretely , the penalty forces the input-gradien t attribution ∇ x s y to redistribute its mass within FG : pixels outside the mask receive near-zero gradien t magnitude, so supp( ∇ x s y ) ⊆ FG up to training tolerance. The resulting attribution map has a known sp atial supp ort , pro viding the con trolled ground truth against which upsampling metho ds can b e ev aluated. USU r e c onstruction pip eline. Coarse attributions are extracted at grid resolu- tions { 4 , 7 , 14 } . Segmen t b oundaries emerge from the model’s o wn score hetero- geneit y via hierarc hical b oundary refinement (Section C ), refined where scores transition across segments and left coarse where scores are homogeneous; USU’s formal guaran tees are independent of ho w S is obtained. The tensor poten- tial temp erature is ε = 0 . 1 . Oracle v ariants (Oracle-USU and Oracle-IWMR) b ypass hierarc hical boundary refinemen t (Section C ), supplying ground-truth segmen tation partitions S directly to isolate the redistribution mac hinery: an y gap betw een a USU v ariant and its oracle upper bound measures b oundary- detection error alone. Figure 8 extends the main pap er’s qualitative comparison to additional syn thetic patterns and in-the-wild samples. F ul l synthetic r esults. T able 5 extends T able 1 with all seven metho ds across three model families. Figure 9 pro vides the extended qualitativ e comparison across all nine configurations. F Ev aluation Metrics W e select six established metrics from the XAI ev aluation literature (T able 6 ) to assess complementary properties of our metho d across faithfulness and com- plexit y dimensions. All metrics are computed using the Quantus library [ 21 ]. 42 V. Buono et al. T able 5: F ull synthetic results: shape classification. Best IoU ( ↑ ), attribution concen tration ( ↑ ), and pointing game accuracy ( ↑ ) across all methods and model fam- ilies. Boldface marks the b est non-oracle result per mod el; shading highlights our metho ds. Mo del Metho d IoU ↑ Conc. ↑ PG ↑ RRL-MLP Nearest 0.77 0.52 0.76 Bilinear 0.81 0.56 0.80 Bicubic 0.84 0.55 0.79 USU 0.88 0.79 1.00 IWMR-USU 0.91 0.84 1.00 Oracle-USU 0.97 0.90 1.00 Oracle-IWMR 1.00 0.95 1.00 RRL-CNN Nearest 0.75 0.50 0.74 Bilinear 0.79 0.54 0.78 Bicubic 0.82 0.52 0.76 USU 0.86 0.76 1.00 IWMR-USU 0.89 0.81 1.00 Oracle-USU 0.96 0.88 1.00 Oracle-IWMR 1.00 0.93 1.00 G Statistical Methodology With metrics defined, w e describ e the statistical methodology ensuring that observ ed improv ements are genuine rather than artifacts of sampling v ariability . Hyp othesis testing. F or each dataset-model-metric combination, w e compare USU against bilinear interpolation using the Wilco xon signed-rank test (non- parametric, paired). W e apply Bonferroni correction for the 9 × 6 = 54 com- parisons (9 dataset-mo del pairs × 6 metrics), yielding a corrected significance threshold of α = 0 . 05 / 54 ≈ 9 . 3 × 10 − 4 . All rep orted p -v alues satisfy p < 0 . 001 after correction. Effe ct sizes. W e rep ort Cohen’s d as the standardized mean difference. T able 7 giv es standard interpretation thresholds alongside observed effect sizes for USU vs. bilinear on Infidelit y . Confidenc e intervals. W e compute b ootstrap 95% confidence interv als using the bias-corrected and accelerated (BCa) metho d with 10,000 resamples. A ttribution Upsampling should Redistribute, Not In terp olate 43 T able 6: Ev aluation metrics. All metrics are computed via Quan tus. Direction indicates whether higher ( ↑ ) or low er ( ↓ ) v alues are b etter. Metric Dir. Description Infidelit y ↓ Expected squared error b etw een attribution-w eighted per- turbations and model output changes. IR OF ↑ F raction of features remov ed b efore the predicted class c hanges (Iterativ e Remo v al of F eatures). Monotonicit y ↑ Spearman correlation b et ween attribution rank and fea- ture deletion impact. PixelFlipping ↓ Area under the p erturbation curv e when removing pixels in attribution order. R OAD ↓ Remo ve-and-debias ev aluation; measures explanation qualit y under debiased perturbation. Sparseness ↑ Gini co efficien t of the attribution map; higher v alues indi- cate more concen trated explanations. T able 7: Effect size analysis. (a) Cohen’s d in terpretation thresholds. (b) Observed Cohen’s d for USU vs. bilinear on Infidelity . Shading marks the active category: all configurations exhibit large effects. (a) Thresholds Magnitude | d | Small 0 . 2 – 0 . 5 Medium 0 . 5 – 0 . 8 Large > 0 . 8 (b) Observed v alues Dataset V GG16 ResNet50 ViT-B-16 ImageNet +1 . 59 +1 . 82 +1 . 71 CIF AR-10 +1 . 95 +1 . 82 +2 . 14 CUB-200 +1 . 87 +0 . 89 +1 . 65 H A ttribution Method Generalization Theorem 4 establishes that USU’s guaran tees dep end only on the mass-and- score input ( M k , s, N , S ) , not on the attribution algorithm that pro duced the coarse map. W e verify this prediction empirically by b enc hmarking seven attri- bution metho ds: GradCAM, HiResCAM, GradCAM++, XGradCAM, F ullGrad, ShapleyCAM, and FinerCAM. These span qualitativ ely distinct strategies, from gradien t weigh ting and second-order expansions to Shapley v alues and eigende- comp osition. T able 8 rep orts raw infidelity v alues (bilinear baseline → upsampled) for b oth USU and USU-IWMR, av eraged across VGG16, ResNet50, and ViT-B-16. Both v ariants reduce infidelit y b y at least t wo orders of magnitude on every dataset; the inter-method CV stays below 8% for USU and at or b elo w 10% for USU- IWMR, confirming s ource-independence. USU-IWMR uniformly improv es ov er USU, with mean improv emen t factors of 37% on ImageNet, 37% on CIF AR-10, and 39% on CUB-200, confirming that imp ortance-w eighted mass redistribution 44 V. Buono et al. T able 8: A ttribution metho d generalization. Raw infidelity v alues (bilinear → v arian t), a veraged across VGG16, ResNet50, and ViT-B-16. lower is b etter A ttribution Source ImageNet ↓ CIF AR-10 ↓ CUB-200 ↓ USU GradCAM 1 , 384 → 3 . 15 1 , 349 → 0 . 230 879 . 9 → 0 . 932 HiResCAM 337 . 4 → 0 . 853 265 . 4 → 0 . 051 176 . 2 → 0 . 197 GradCAM++ 1 , 041 → 2 . 47 1 , 045 → 0 . 187 715 . 1 → 0 . 773 X GradCAM 1 , 318 → 2 . 83 1 , 637 → 0 . 281 711 . 7 → 0 . 683 F ullGrad 2 , 295 → 6 . 18 1 , 839 → 0 . 379 877 . 6 → 1 . 05 ShapleyCAM 1 , 504 → 3 . 71 2 , 631 → 0 . 485 800 . 2 → 0 . 892 FinerCAM 1 , 411 → 3 . 48 1 , 358 → 0 . 283 892 . 3 → 0 . 954 Mean factor ± std 415 ± 29 5 , 363 ± 407 925 ± 58 CV (%) 6 . 9 7 . 6 6 . 3 USU-IWMR GradCAM 1 , 384 → 2 . 22 1 , 349 → 0 . 177 879 . 9 → 0 . 688 HiResCAM 337 . 4 → 0 . 628 265 . 4 → 0 . 037 176 . 2 → 0 . 145 GradCAM++ 1 , 041 → 1 . 71 1 , 045 → 0 . 127 715 . 1 → 0 . 526 X GradCAM 1 , 318 → 2 . 07 1 , 637 → 0 . 211 711 . 7 → 0 . 484 F ullGrad 2 , 295 → 4 . 88 1 , 839 → 0 . 292 877 . 6 → 0 . 744 ShapleyCAM 1 , 504 → 2 . 67 2 , 631 → 0 . 330 800 . 2 → 0 . 667 FinerCAM 1 , 411 → 2 . 64 1 , 358 → 0 . 218 892 . 3 → 0 . 691 Mean factor ± std 567 ± 55 7 , 329 ± 731 1 , 284 ± 95 CV (%) 9 . 7 10 . 0 7 . 4 yields a consisten t additiv e b enefit. The con trolled experiments (Section 4.1 ) pro vide further evidence using raw gradien t attributions from architectures in- cluding MLPs. I F ull Dataset Results W e conclude with complete results across all six metrics, three datasets, three arc hitectures, and six upsampling metho ds. USU consistently outp erforms in- terp olation baselines; Infidelity impro vemen ts range from one to four orders of magnitude. T ables 9 and 10 rep ort the complete results across all metho ds, mo dels, and metrics for eac h dataset. A ttribution Upsampling should Redistribute, Not In terp olate 45 T able 9: F ull ImageNet and CIF AR-10 results. Six metrics across three archi- tectures and six upsampling metho ds, group ed by direction. Boldface marks the b est p er mo del and metric; shading highligh ts our metho ds. lower is b etter higher is b etter Mo del Metho d Infid. ↓ PxFlip ↓ R OAD ↓ IR OF ↑ Mono. ↑ Sparse. ↑ ImageNet V GG16 Nearest 7 . 15 × 10 6 0.62 0.58 0.41 0.18 0.31 Bilinear 6 . 91 × 10 6 0.60 0.56 0.43 0.19 0.33 Bicubic 7 . 82 × 10 6 0.61 0.57 0.42 0.18 0.32 Lanczos-3 8 . 14 × 10 6 0.62 0.58 0.41 0.18 0.31 USU 1 . 27 × 10 5 0.27 0.23 0.61 0.34 0.73 USU-Hybrid 1 . 13 × 10 5 0.29 0.26 0.65 0.30 0.74 ResNet50 Nearest 5 . 02 × 10 7 0.65 0.61 0.38 0.17 0.29 Bilinear 4 . 87 × 10 7 0.63 0.59 0.40 0.18 0.31 Bicubic 5 . 41 × 10 7 0.64 0.60 0.39 0.17 0.30 Lanczos-3 5 . 63 × 10 7 0.65 0.61 0.38 0.17 0.29 USU 2 . 45 × 10 5 0.31 0.28 0.59 0.30 0.70 USU-Hybrid 2 . 21 × 10 5 0.32 0.29 0.61 0.29 0.72 ViT-B-16 Nearest 2 . 31 × 10 8 0.68 0.64 0.35 0.20 0.27 Bilinear 2 . 19 × 10 8 0.66 0.62 0.37 0.20 0.29 Bicubic 2 . 48 × 10 8 0.67 0.63 0.36 0.20 0.28 Lanczos-3 2 . 59 × 10 8 0.68 0.64 0.35 0.20 0.27 USU 7 . 85 × 10 5 0.34 0.31 0.56 0.30 0.68 USU-Hybrid 7 . 02 × 10 5 0.35 0.32 0.58 0.30 0.70 CIF AR-10 V GG16 Nearest 3 . 28 × 10 7 0.64 0.60 0.39 0.17 0.30 Bilinear 3 . 12 × 10 7 0.62 0.58 0.41 0.18 0.32 Bicubic 3 . 55 × 10 7 0.63 0.59 0.40 0.17 0.31 Lanczos-3 3 . 71 × 10 7 0.64 0.60 0.39 0.17 0.30 USU 7 . 12 × 10 4 0.30 0.27 0.60 0.30 0.72 USU-Hybrid 6 . 47 × 10 4 0.31 0.28 0.62 0.29 0.74 ResNet50 Nearest 9 . 18 × 10 7 0.66 0.62 0.37 0.16 0.28 Bilinear 8 . 95 × 10 7 0.64 0.60 0.39 0.17 0.30 Bicubic 9 . 87 × 10 7 0.65 0.61 0.38 0.16 0.29 Lanczos-3 1 . 02 × 10 8 0.66 0.62 0.37 0.16 0.28 USU 2 . 38 × 10 5 0.32 0.29 0.58 0.29 0.69 USU-Hybrid 2 . 21 × 10 5 0.33 0.30 0.60 0.28 0.71 ViT-B-16 Nearest 2 . 71 × 10 8 0.69 0.65 0.34 0.20 0.26 Bilinear 2 . 57 × 10 8 0.67 0.63 0.36 0.20 0.28 Bicubic 2 . 89 × 10 8 0.68 0.64 0.35 0.20 0.27 Lanczos-3 3 . 01 × 10 8 0.69 0.65 0.34 0.20 0.26 USU 2 . 15 × 10 4 0.34 0.32 0.55 0.30 0.67 USU-Hybrid 1 . 98 × 10 4 0.36 0.34 0.58 0.30 0.70 46 V. Buono et al. T able 10: F ull CUB-200-2011 results. S ame format as T able 9 . lower is b etter higher is b etter Mo del Metho d Infid. ↓ PxFlip ↓ R OAD ↓ IR OF ↑ Mono. ↑ Sparse. ↑ V GG16 Nearest 5 . 68 × 10 6 0.63 0.59 0.40 0.18 0.30 Bilinear 5 . 44 × 10 6 0.61 0.57 0.42 0.19 0.32 Bicubic 6 . 12 × 10 6 0.62 0.58 0.41 0.18 0.31 Lanczos-3 6 . 38 × 10 6 0.63 0.59 0.40 0.18 0.30 USU 1 . 83 × 10 3 0.27 0.26 0.59 0.32 0.71 USU-Hybrid 1 . 70 × 10 3 0.30 0.27 0.62 0.30 0.74 ResNet50 Nearest 8 . 71 × 10 7 0.67 0.63 0.36 0.16 0.27 Bilinear 8 . 46 × 10 7 0.65 0.61 0.38 0.17 0.29 Bicubic 9 . 32 × 10 7 0.66 0.62 0.37 0.16 0.28 Lanczos-3 9 . 68 × 10 7 0.67 0.63 0.36 0.16 0.27 USU 1 . 52 × 10 7 0.43 0.39 0.50 0.28 0.55 USU-Hybrid 1 . 40 × 10 7 0.46 0.40 0.51 0.27 0.59 ViT-B-16 Nearest 1 . 92 × 10 8 0.69 0.65 0.34 0.20 0.26 Bilinear 1 . 83 × 10 8 0.67 0.63 0.36 0.20 0.28 Bicubic 2 . 05 × 10 8 0.68 0.64 0.35 0.20 0.27 Lanczos-3 2 . 14 × 10 8 0.69 0.65 0.34 0.20 0.26 USU 5 . 61 × 10 4 0.35 0.32 0.55 0.30 0.67 USU-Hybrid 5 . 08 × 10 4 0.36 0.33 0.57 0.30 0.69 A ttribution Upsampling should Redistribute, Not In terp olate 47 (ours) USU e ( x ) Ground T r uth triangle-150 224px 224px 7px e ( x ) Ground T r uth circle-150 224px 224px 7px e ( x ) Ground T r uth perio dic-t 224px 224px 7px e ( x ) Ground T r uth concwa ve 224px 224px 7px e ( x ) Ground T r uth occlusion 224px 224px 7px e ( x ) Ground T r uth moire 224px 224px 7px e ( x ) Ground T r uth sinewa ve 224px 224px 7px e ( x ) Ground T r uth square-15 224px 224px 7px e ( x ) Ground T ruth circle-15 224px 224px 7px Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Sample ( x ) ˆ e ( x ) ↑ ˆ e ( x ) Bilinear ↑ ˆ e ( x ) Bicubic ↑ ˆ e ( x ) Lanczos Fig. 9: In terp olation artifacts vs. USU reconstruction on synthetic data. Nine RRL-trained configurations spanning geometric shap es (rows 1–2, 8–9) and p eriodic patterns (ro ws 3–7). F rom left: ground-truth attribution e ( x ) , input sample, coarse 7 × 7 heatmap ˆ e ( x ) , bilinear, bicubic, and Lanczos upsampling, and USU (ours). All three in terp olation methods exhibit b oundary bleeding and interior distortion; USU reco vers the ground-truth supp ort faithfully , consisten t with the mass conserv ation guaran tee (D1).
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment