The Price of Universal Temporal Reachability
Dynamic networks are graphs in which edges are available only at specific time instants, modeling connections that change over time. The dynamic network creation game studies this setting as a strategic interaction where each vertex represents a play…
Authors: Binh-Minh Bui-Xuan, Nhat-Minh Nguyen, Sébastien Tixeuil
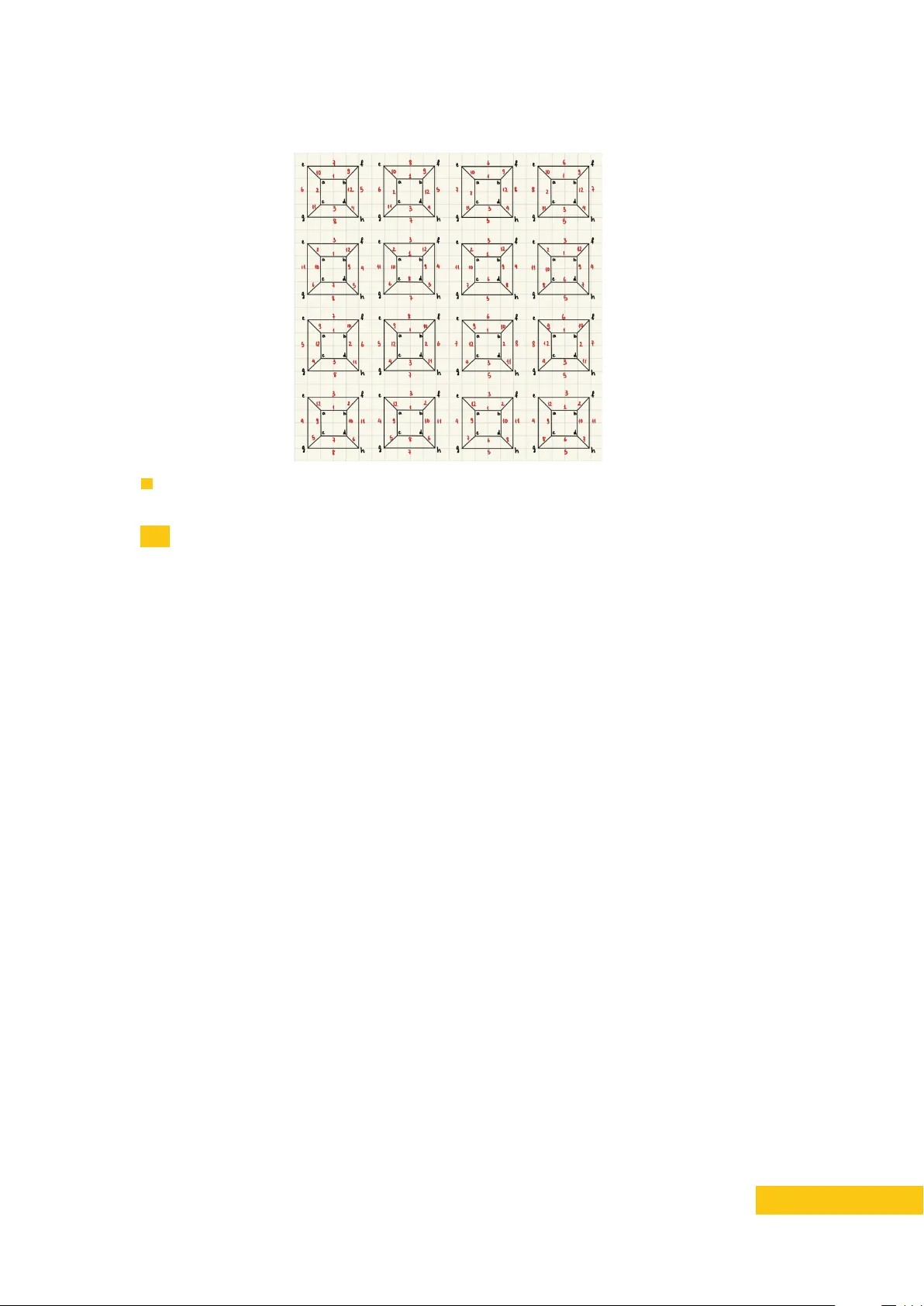
The Price of Universal T emp o ral Reachabilit y Binh-Minh Bui-Xuan # LIP6, CNRS, Sorb onne Univ ersité, F rance Nhat-Minh Nguy en # LIP6, CNRS, Sorb onne Univ ersité, F rance Sébastien Tixeuil # LIP6, CNRS, Sorb onne Univ ersité, F rance Y ukik o Y amauchi # Departmen t of Informatics, Kyush u Univ ersit y , Japan Abstract Dynamic net w orks are graphs in whic h edges are av ailable only at specific time instants, modeling connections that c hange ov er time. The dynamic net work creation game studies this setting as a strategic interaction where each vertex represents a play er. Pla yers can add or remov e time-lab eled edges in order to minimize their p ersonal cost. This cost has tw o comp onents: a construction cost, calculated as the num b er of time instants during which a play er maintains edges multiplied by a constan t α , and a communication cost, defined as the av erage distance to all other vertices in the net work. Communication o ccurs through temp oral paths, which are sequences of adjacen t edges with strictly increasing time lab els and no rep eated vertices. W e show for the shortest distance (minimizing the num b er of edges) that the price of anarch y can b e prop ortional to the num ber of v ertices, con trasting the constant price conjectured for static netw orks. 2012 ACM Subject Classification Theory of computation → Net w ork formation; Mathematics of computing → Paths and connectivity problems Keyw o rds and phrases dynamic netw ork, game theory , Nash equilibrium Digital Object Identifier 10.4230/LIPIcs.CVIT.2016.23 1 Intro duction The Network cr e ation game (NCG) w as first introduced by F abrikan t et al. [ 13 ] and has b een extensiv ely in v estigated as a game-theoretic mo del to understand netw orks formed by selfish agen ts. An NCG is defined b y the strategy and cost at agen ts in the t ypical non-co op erative strategic game fashion. The strategy space of an agent is the subset of agents, that means the agent constructs a communication edge at a cost of α to each agent in its strategy . A strategy profile (i. e., the tuple of strategies) of all agents defines a communication netw ork, where each communication link can b e used b y other agents in b oth directions. The cost of an agent is the sum of the construction cost, which is the size of its strategy multiplied b y α , and the communication cost, whic h is the sum of distance to all the other agents on the comm unication netw ork formed by the current strategy profile. Eac h agent can c hange its strategy so that its cost is minimized, but selfish b ehavior of agen ts may result in an Nash e quilibrium , where no agent can strictly reduce it cost b y c hanging its own strategy . The so cial cost of an NCG is the sum of the cost of all agents, and the quality of a comm unication net work formed b y NCG is ev aluated b y the Pric e of A nar chy (PoA) , which is the ratio b et w een the maximum so cial cost of a Nash equilibrium and optimal so cial cost. F abrikant et al. p ointed out that if every Nash equilibrium is a tree, then the PoA of an NCG is smaller than five [ 13 ]. Then, the top ology of a Nash equilibrium has b een extensiv ely in v estigated to prov e this “T ree Conjecture,” while there are non-tree Nash equilibria for n < α . Recen tly , Dipp el and V etta sho wed that the conjecture is true for α > 3 n − 3 , thus © Binh-Minh Bui-Xuan, Nhat-Minh Nguyen, Sébastien Tixeuil, and Y ukik o Y amauchi; licensed under Creative Commons License CC-BY 4.0 42nd Conference on V ery Imp ortant T opics (CVIT 2016). Editors: John Q. Op en and Joan R. Access; Article No. 23; pp. 23:1–23:11 Leibniz International Pro ceedings in Informatics Schloss Dagstuhl – Leibniz-Zentrum für Informatik, Dagstuhl Publishing, Germany 23:2 The Price of Universal T emp oral Reachability the P oA is constan t [ 12 ]. How ev er, F abrikant et al. p ointed out that computing a b est resp onse of NCG is NP-hard in their seminal pap er [ 13 ], and Kaw ald and Lenzner show ed that an NCG ma y admit a b est resp onse cycle [ 14 ]. That is, selfish play ers cannot alw ays form an efficient communication netw ork by rational strategy c hanges. Alon et al. in tro duced a restricted version of the NCG, called the b asic network cr e ation game (BNCG), where an agen t can only remo v e one inciden t edge and add another incident edge at one time [ 2 ]. The BNCG remo ves the construction cost since any strategy c hange cannot change the size of a strategy profile, and it fo cuses on the structure of a communication netw ork. Additionally , a b est resp onse of a swap game can b e computed in a p olynomial time. The authors show ed that the diameter of any tree Nash equilibrium of the BNCG is tw o (i.e., a star), while that of a general graph is 2 O ( √ lg n ) . Lenzner show ed that BNCG starting in a tree comm unication graph is a p otential game , i.e., there exists a p otential function on the strategy profile that monotonically decreases by selfish strategy changes. They show ed that BNCG con v erges to an equilibrium in O ( n 3 ) strategy c hanges, while it admits a b est resp onse cycle on a general graph. Inspired by large computer netw orks, where users and computers are sub ject to hardware limitations, locality , and asynchron y , NCGs under differen t constraints hav e b een in tro duced. Bilò et al. introduced an NCG with lo cal information, where each pla y er knows strategies of other play ers in its k -neigh b orho o d and considers the worst case for the other play ers in the outside of its visibility [ 5 ]. Cord-Landw ehr and Lenzner in tro duced an NCG where the strategy space of a play er is other play ers within distance k but the comm unication cost of a pla y er dep ends on the entire communication netw ork [ 10 ]. Bilò et al. in tro duced the NCG on a host graph, where agen ts cannot construct a comm unication edge not included in the host graph [ 6 ]. In recent years, temp oral graphs hav e attracted atten tion as a fundamental mathematical framew ork for modeling the dynamic behavior of computer netw orks. A temp oral graph is an edge-lab eled graph, where a lab el of an edge shows when the edge is a v ailable. Bilò et al. in tro duced the temp or al r e achability network cr e ation game , where the play ers buy the edges of a host temp oral graph [ 3 ]. Sp ecifically , the authors consider a single-labeled temporal graph, where eac h edge is av ailable only at a particular time instance. The strategy space of a pla y er is a subset of play ers, whic h corresp onds to a set of temp oral edges, i.e., a tuple of an edge and time instance. The construction cost of a pla y er is the size of its strategy , and the communication cost is the num b er of unreac hable pla y ers m ultiplied by a constant K , where tw o play ers are reachable when there exists a monotonically increasing temp oral path. They sho wed that PoA is in Ω( log n ) for n pla y ers b y sho wing that a log n -dimensional h yp ercub e is a Nash equilibrium while a spanning tree is a social optimum. This result matches the optimum and minimal netw ork design for temp oral graphs b y Akrida et al. [ 1 ]. The authors sho wed that given an y graph G , the minim um num b er of time lab els required for reachabilit y betw een an y pair of v ertices is ac hiev ed b y assigning time lab els along a spanning tree of G and it is 2 n − 3 , while there exists a minimal lab eling along a hypercub e that requires Θ( n log n ) lab els and remov al of an y time lab el loses connectivity of some pair of vertices. Bilò et al. further extended the game with the terminal mo del, where the play ers consider reachabilit y to a common subset of terminal play ers, and the glob al e dge buying mo del , where play ers can construct edges b et w een any play ers [ 4 ]. They sho w ed that PoA for k terminals is Ω( √ k ) in the global buying mo del, while it is Ω( log k ) for the original lo cal buying mo del. Thus, global strategy does not impro v e the PoA. These tw o pap ers b oth p oin t out that it is imp ortant to consider play ers who wan t to minimize the arriv al time [3] or the total distance [4] on a temp oral graph. In this pap er, we adopt the shortest distance instead of reachabilit y for the communication Binh-Minh Bui-Xuan, Nhat-Minh Nguy en, Sébastien Tixeuil, and Y ukiko Y amauchi 23:3 cost of an NCG on temp oral graphs. A temp oral path with strictly increasing time lab els is a sequence of temp oral edges (i.e., lab eled edges), where the lab el of edges strictly increases. W e define the distance b etw een tw o play ers on a temporal communication graph as the minim um length of a temp oral path with strictly increasing time lab els b etw een them. Then, w e adopt the original cost function for a pla yer, i.e., the sum of the size of its strategy m ultiplied by α and the sum of the shortest distance to all the other play ers. Con trasting the static netw ork creation game, we sho w for any α ≥ 2 a very high PoA, prop ortional to n . 2 Dynamic net w ork creation game In this pap er, we use standard graph theory v o cabulary for undirected simple graphs with p ossible lo ops [ 7 , 11 , 16 ]. W e also use the abusive notation uv = v u = { u, v } when it is clear from the context that u and v are v ertices. The dynamic netw ork creation game we consider has a non negative atomic c ost α > 0 , it is play ed b y a set of n players called V . The str ate gy of pla yer v ∈ V is a finite set s ( v ) ∈ 2 V × N . A str ate gy pr ofile for play ers V is a sequence of strategies s = ( s ( v )) v ∈ V . The so cial c ost of playing s is c [ s ] = P v ∈ V c [ s ]( v ) , where c [ s ]( v ) denotes the individual c ost of play er v . This individual cost has tw o comp onents, the first corresp onding to the cost for maintaining connection, while the second is related to either the out-reachabilit y of the play er to w ards the rest of the netw ork, or the in-reachabilit y to the play er from the rest of the netw ork. W e will see later that the definition of so cial cost will not c hange, whic hev er definition of individual cost in use. Ho wev er, there will b e situations whic h are Nash equilibria for one definition but not necessarily Nash equilibria for the other definition (Figure 1). F ormally , c [ s ]( v ) = c + [ s ]( v ) or c [ s ]( v ) = c − [ s ]( v ) where c + [ s ]( v ) = α × | s ( v ) | + X w ∈ V d G [ s ] ( v , w ) and c − [ s ]( v ) = α × | s ( v ) | + X u ∈ V d G [ s ] ( u, v ) where G [ s ] is called the communication temp oral graph of s , where d G [ s ] ( v , w ) ≥ 0 is called the temp oral distance from v to w in G [ s ] , and where b oth notions are to b e formally defined in the sequel. W e will also see that d G [ s ] is not necessarily symmetric (Figure 1). T o simplify notations, in what follows we stop mentioning s with notation [ s ] . Precisely , w e let G = G [ s ] , E = E [ s ] and λ = λ [ s ] . The c ommunic ation temp or al gr aph G of str ate gy pr ofile s is a tuple G = ( V , E , λ ) where E = { uv : ∃ t ∈ N s.t. ( u, t ) ∈ s ( v ) ∨ ( v , t ) ∈ s ( u ) } and λ ( uv ) = { t : ( u, t ) ∈ s ( v ) ∨ ( v , t ) ∈ s ( u ) } for ev ery uv ∈ E . That is, G = ( V , E ) is a graph and λ : E → 2 N . F or ev ery edge e ∈ E , the elements of set λ ( e ) are called the time lab els corresp onding to instants when edge e is considered active. If | λ ( uv ) | = 1 for every uv ∈ E , w e say that temp oral graph G has simple lab el ling . A temp or al p ath from v to w in G is a path from v to w in G together with strictly increasing time lab els on the edges app earing in the path, that is, a sequence ( e 1 , t 1 ) , ( e 2 , t 2 ) , . . . , ( e k , t k ) , where t i ∈ λ ( e i ) for 1 ≤ i ≤ k , where the edges e 1 , e 2 , . . . , e k form a path from v to w in G , and where t 1 < t 2 < · · · < t k . Because of the time lab els, a temp oral path might exist from v to w when there is no temp oral path from w to v . Three v ariants of the dynamic netw ork creation game can b e defined, corresp onding to the definition of temp or al distanc e d G ( v , w ) fr om v to w in G as one of the three following alternativ es. In an y case it is infinite when there is no temporal path from v to w in G , otherwise it is: C V I T 2 0 1 6 23:4 The Price of Universal T emp oral Reachability a 8 10 9 1 7 11 4 3 8 6 5 2 Figure 1 A strategy profile with n = 8 . Every edge has an arrow originating from the vertex whic h has b ought the edge. The communication temp oral graph contains all the edges, without the arro ws which ha ve no meaning for the graph. F or high atomic cost α ≥ 100 this strategy profile is a Nash equilibrium when the individual cost is defined using the out-reachabilit y . In particular, v ertex a need to buy the edge lab eled with 8 in order to reach its neighbour at the other extremity of that edge. How ever, this strategy profile is not a Nash equilibrium for any atomic cost α when the individual cost is defined using the in-reachabilit y: v ertex a w ould then rather not buy the tw o edges lab eled 8 and 11 . In particular, its neighbour at the other extremity of the edge lab eled with 8 can take the edge lab eled with 4 then the edge lab eled with 7 in order to reach vertex a . shortest distanc e : the least num b er of edges in a temporal path from v to w ; for emost distanc e : the smallest time lab el t k for whic h there exists a temp oral path ( e 1 , t 1 ) , ( e 2 , t 2 ) , . . . , ( e k , t k ) from v to w ; fastest distanc e : the smallest v alue t k − t 1 for whic h there exists a temp oral path ( e 1 , t 1 ) , ( e 2 , t 2 ) , . . . , ( e k , t k ) from v to w . Strategy profile s has optimal so cial c ost if its so cial cost is minimum among all p ossible strategy profiles with the same atomic cost α and the same n um b er n of play ers. Strategy profile s is a Nash e quilibrium if for every play er v ∈ V , there is no other strategy profile s ′ for V with the same atomic cost and s ′ ( u ) = s ( u ) , for ev ery u = v , suc h that the individual cost of v when playing s ′ is strictly less than the individual cost of v when playing s . Figure 1 exemplifies strategy profiles and Nash equilibria. Giv en α > 0 and a n um b er n of pla yers, the pric e of anar chy P oA ( α, n ) is the ratio of the worst (maximum) so cial cost of a Nash equilibrium o ver the optimal so cial cost for strategy profiles with atomic cost α and n pla y ers. The pric e of stability P oS ( α, n ) is defined similarly with the ratio of the b est (minimum) so cial cost of a Nash equilibrium ov er the optimal cost. These are well-defined (finite) ratios because of the following observ ations. The so cial cost of a strategy profile where every vertex buys an edge to every other vertex (with an y time lab el) is finite. Hence, the optimal so cial cost for any α > 0 and any n ∈ N is finite. Suppose a Nash equilibrium exists with infinite cost, then, there exist v ertices u and v for which the temp oral distance from u to v is infinite. But then adding v , together with any time lab el, to the strategy of u w ould strictly decrease the individual cost for u in the new strategy profile. Contradiction. Hence, the social cost of any Nash equilibrium for α and n is finite. Whence, b oth 1 ≤ P oS ( α, n ) ≤ P oA ( α, n ) are finite n um b ers. Let s b e a strategy profile with either an optimal so cial cost or the fact that s is a Nash equilibrium. W e hav e just seen that the so cial cost of s is finite. W e would like now to give an equiv alent definition of this so cial cost. Let G = G [ s ] = ( V , E , λ ) b e the communication temp oral graph of s . By a similar argumen t as ab o ve, an y edge with any time lab el will not b e bought twice, we then also confound the so cial cost c [ s ] of strategy s with what we call c ( G ) , the so cial c ost of G . It is defined as follo ws, where the v alue do es not change either we Binh-Minh Bui-Xuan, Nhat-Minh Nguy en, Sébastien Tixeuil, and Y ukiko Y amauchi 23:5 consider out-reachabilit y or in-reachabilit y for the individual cost: c ( G ) = c [ s ] = X v ∈ V c + [ s ]( v ) = X v ∈ V c − [ s ]( v ) = α × X e ∈ E | λ ( e ) | + X u,v ∈ E d G ( u, v ) . Since c ( G ) is finite, the temp oral distance from an y vertex u to any vertex v m ust b e finite to o. In this case, temp oral graph G is called temp or al ly c onne cte d . Its diameter is defined as the maximum temp oral distance from a vertex to another vertex. 3 Lo w p rice of stabilit y and high p rice of ana rchy In this pap er, we study games with the temp oral shortest distance function. In the classical game of netw ork creation on static graphs, trees (and stars) play a crucial role since they are connected graphs with the least n um b er of edges. This is not the case for temp oral graphs, where computing the optimal size of a temp oral spanner is an op en question [ 9 ]. F or classical games, trees also inspired the T r e e Conje ctur e [ 13 ], whose consequence would b e a constantly b ounded price of anarc hy . F or dynamic games, we sho w a lo osely unbounded price: giv en an y α , there are at least some v alues of n where P oA ( α, n ) ≥ n 13 . While not implying a low er b ound in Ω( n ) for the price of anarch y , this hints at a very bad aftermath for the dynamic net w ork creation game when play ers are unco operative. ▶ Theo rem 1. In a dynamic network cr e ation game with atomic c ost α and n players using the temp or al shortest distanc e for their c ommunic ation c ost: if 0 < α < 1 , then 1 = P oS ( α, n ) = P oA ( α, n ) . if 1 ≤ α < 2 , then 1 ≤ P oS ( α, n ) ≤ P oA ( α, n ) ≤ 4 3 . The upp er b ound 4 3 is not tight and only achievable asymptotic al ly for α = 1 and n → ∞ . if α ≥ 2 , then P oS ( α, n ) = 1 . Ther e exists n such that P oA ( α, n ) ≥ n 13 . Pro of. The tw o first items and the men tion ab out P oS in the last item follow from b elow Lemma 2. A weak er version of the last statement, with P oA ( α, n ) ≥ log n 4 , follows from b elow Lemma 4, whic h exploits the structure of h yp ercub es in the same manner as in Refs. [ 3 , 15 ]. The last statement, ab out P oA ( α, n ) ≥ n 13 , follows from b elow Lemma 5. ◀ Let K n b e the n -v ertex complete graph. Let K 2 ,n − 2 b e the n -v ertex complete bipartite graph where one party has exactly tw o v ertices. Let F n b e the ( n + 1) -v ertex graph called n -fan graph, and defined as the resulting graph when adding one universal vertex to an n -v ertex path. Let dF n b e the ( n + 1) -v ertex graph called the diminished n -fan graph, and defined as the resulting graph when removing the c hord from one of the tw o 4 -cycles con taining a degree 2 v ertex in an n -fan graph F n . A drawing of dF 7 is shown in the righ tmost part of Figure 2. ▶ Lemma 2. The so cial optimum of a dynamic network cr e ation game with atomic c ost α > 0 and n players is e qual to the so cial c ost of a str ate gy pr ofile whose c ommunic ation gr aph is: K n and any simple lab el ling, if 0 < α ≤ 2 ; K 2 ,n − 2 to gether with some wel l chosen simple lab el ling, if α ≥ 2 . The worst Nash e quilibrium is r e alize d by a str ate gy pr ofile whose c ommunic ation gr aph is: K n and any simple lab el ling if 0 < α < 1 , which also implies 1 = P oS ( α, n ) = P oA ( α, n ) ; K 2 ,n − 2 to gether with some wel l chosen simple lab el ling if 1 ≤ α < 2 , mor e over, 1 ≤ P oS ( α, n ) ≤ P oA ( α, n ) ≤ 4 3 . The upp er b ound 4 3 is not tight and only achievable asymptotic al ly for α = 1 and n → ∞ . C V I T 2 0 1 6 23:6 The Price of Universal T emp oral Reachability 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 2 3 4 5 6 6 5 4 3 2 1 2 3 3 2 2 3 3 2 1 1 1 1 12 5 4 3 2 1 6 7 8 9 10 11 Figure 2 F our temp orally connected temp oral graphs ov er n = 8 vertices, whose union graphs are a clique K 8 (leftmost), a biclique K 2 , 6 (middle-left), a hypercub e Q 3 (middle-righ t), and a linear structure called dF 7 whic h is a 7 -fan with one missing edge (rightmost). With respect to the shortest distance, they ha v e diameter 1 , 2 , 3 , and n − 2 , resp ectiv ely . The arrows on K 2 , 6 (middle-left) and the diminished 7 -fan (rightmost) represent tw o strategy profiles, where vertices buy the arrows from which they originate. F or an atomic cost where α ≥ 1 , the former strategy profile is a Nash equilibrium. F or big enough atomic cost α ≥ 3 , b oth the former strategy and the Q 3 (middle-righ t, with any purchasing configuration) are Nash-equilibria. F or high atomic cost α ≥ 100 b oth former and latter strategy profiles are Nash equilibria together with the hypercub e Q 3 . The latter c ase is stil l a Nash e quilibrium for α ≥ 2 , which also implies P oS ( α, n ) = 1 . Pro of. The proof is inspired from [ 13 ]. Let G = G [ s ] = ( V , E , λ ) be the communication temp oral graph of s , a strategy profile with either an optimal so cial cost or the fact that s is a Nash equilibrium. F or every pair of v ertices u and v , either uv ∈ E and w e also ha v e d G ( u, v ) = d G ( v , u ) = 1 , or we hav e b oth d G ( u, v ) ≥ 2 and d G ( v , u ) ≥ 2 . Hence, c ( G ) = c [ s ] = α X e ∈ E | λ ( e ) | + X u,v ∈ E d G ( u, v ) ≥ α | E | + 2 | E | × 1 + ( n ( n − 1) − 2 | E | ) × 2 ≥ 2 n ( n − 1) + ( α − 2) | E | , where the b ound is tight if G has simple lab elling and diameter at most 2 . If α < 2 , the so cial cost is minimized when in addition to the ab ov e, | E | is maximized. This is realized b y K n together with any simple lab elling. If α ≥ 2 , the social cost is minimized when | E | is minimized among G with simple lab elling and diameter at most 2 . F rom Ref. [ 8 ], the minimum num b er of time lab els needed for a temp orally connected temp oral graph is 2 n − 4 . T ogether with the requirement ab out the diameter and single lab elling, w e result in K 2 ,n − 2 together with the following lab elling. Both v ertices of degree ( n − 2) hav e their incident edges taking distinct lab els from 1 to n − 2 . The sum of time lab els on b oth incident edges of any vertex of degree 2 is n − 1 . When n = 8 , such a lab elling is shown in the middle-left part of Figure 2. As for Nash equilibria, if α < 1 , any non-edge uv / ∈ E w ould b e b ought by either u or v , together with any time lab el, in order to decrease its cost b y at least 1 unit (from the difference b etw een the previous distance from u to v and the new one). Hence, the diameter of G is 1 for this case. It must then b e K n together with any simple lab elling. Hence, P oA ( α, n ) = 1 . Similarly as b efore, in case of Nash equilibrium, if α < 2 , whenever the distance from u to v is at least 3 , vertex u w ould buy the non-edge uv , together with any time lab el, in order to decrease its cost b y at least 2 units (from the difference b etw een the previous distance Binh-Minh Bui-Xuan, Nhat-Minh Nguy en, Sébastien Tixeuil, and Y ukiko Y amauchi 23:7 from u to v and the new one). Hence, the diameter of G is at most 2 for this case. The worst so cial cost is realized by K 2 ,n − 2 together with the ab ov e defined lab elling. Hence, P oA ( α, n ) = 2 n ( n − 1) + ( α − 2)(2 n − 4) 2 n ( n − 1) + ( α − 2)( n ( n − 1) 2 ) = 4 n 2 + 4( α − 3) n − 8 α + 16 ( α + 2) n 2 − ( α + 2) n ≤ 4 3 . It remains to prov e for α ≥ 2 that P oS ( α, n ) = 1 . Consider four v ertices a, b, c, d in K 2 ,n − 2 : a and b ha v e degree n − 2 while c and d are c hosen arbitrarily . Let: a buy the edge ac with time lab el n − 2 ; b buy the edge bd with time lab el n − 2 ; c buy the edge bc with time lab el 1 ; d buy the edge ad with time lab el 1 ; any other vertex e buy b oth edges ae and be at time lab els i and n − 1 − i , for 2 ≤ i ≤ n − 3 . This strategy profile is a Nash equilibrium with the same so cial cost as the optimum one. An example with n = 8 is shown by the arrows in the middle-left part of Figure 2. ◀ When 1 ≤ α < 2 , the asymptotic growth is medium: any price of anarch y higher than 1 . 25 implies n ≥ 15 , and higher than 1 . 3 implies n ≥ 39 . F or the case where α ≥ 2 , w e study whether the communication temporal graphs of Nash equilibria ha ve small ratio when compared to the optimal so cial cost. W e sho w in the middle-righ t part of Figure 2 a h yp ercub e whose time lab els are inspired by Refs. [ 3 , 15 ]. It is a Nash equilibrium for α ≥ 3 . W e show in Lemma 4 b elow that the ratio of so cial cost b et w een the latter hypercub es and the optimal social cost is unbounded. How ever, these hypercub es are communication temp oral graphs of Nash equilibria only for big enough α , precisely when α > log n . The follo wing prop ert y of hypercub es is crucial for pro ving the subsequent Lemma 4. ▶ Lemma 3. F or any dimension d ∈ N , ther e exists a single lab el ling of the hyp er cub e Q d such that the temp or al shortest distanc e in the r esulting time lab el le d temp or al gr aph is the same as the ge o desic distanc e in static gr aph Q d . Mor e over, for any p air of distinct sour c e and tar get vertic es, ther e is one and only one temp or al p ath fr om the sour c e vertex to the tar get vertex. This includes the c ase when the sour c e and tar get vertic es ar e neighb ours: the only temp or al p ath is the dir e ct e dge fr om the sour c e vertex to the tar get vertex, without any other alternative. Pro of. W e use the same lab elling as in Refs. [ 3 , 15 ], which is defined as follo ws. The 2 d v ertices of the hypercub e Q d are represented by the binary n umbers of the 2 d first integers 0 , 1 , . . . , 2 d − 1 . There is an edge b etw een tw o vertices if and only if their binary n umbers differ by only one bit. Moreo v er, the edge is time labelled with the p osition of the bit. F or instance, the vertex with binary num b er 0110110 2 and the one with binary num b er 0110010 2 are neighbours, their incident edge has time lab el 3 when using little endian order. The lemma can b e prov en b y induction. Supp ose b oth prop erties in the statement of the lemma hold for the ab ov e (single) lab elling of hypercub es of dimension d − 1 . W e partition the v ertices of Q d in to tw o parts: A con tains vertices with binary num b er b eginning with 1 and B con tains the rest. Let u = v b e tw o distinct vertices of Q d . Since b oth Q d [ A ] and Q d [ B ] are hypercub es, the cases where { u, v } ⊆ A or { u, v } ⊆ B satisfy b oth prop erties in the statement of the lemma from the induction hypothesis. W e consider w.l.o.g. the case when u ∈ A and v ∈ B , the other case being symmetric. Let v ′ ∈ A b e the v ertex with binary n umber b eginning with 1 and ending with the same d − 1 bits as v : v v ′ is an edge in Q d lab elled with d . An y temp oral path from u to v m ust take an edge incident with a vertex in A and a v ertex in B : this edge has time lab el d . Ho wev er, the edges in Q d [ B ] can only hav e as time lab els the integers b etw een 1 and d − 1 . Hence, any temp oral path from u to v m ust b e a C V I T 2 0 1 6 23:8 The Price of Universal T emp oral Reachability temp oral path from u to v ′ first, follo wed by the edge from v ′ to v . Applying the induction h yp othesis on Q d [ A ] and its vertices u and v ′ allo ws to conclude. ◀ ▶ Lemma 4. L et α ≥ 2 . L et d ∈ N b e an inte ger and let n = 2 d . F or dynamic network cr e ation games with atomic c ost α and n players, the optimal so cial c ost is c ∗ = 2 d +1 (2 d − 1) + ( α − 2)(2 d +1 − 4) . ther e exists a lab el ling of the hyp er cub e Q d with so cial c ost c ( Q d ) = d × α × 2 d − 1 + d × 2 2 d − 1 . Mor e over, if α ≥ d then the latter c ase is the c ommunic ation temp or al gr aph of a Nash e quilibrium. Pro of. The first equalit y follows from Lemma 2 where n is replaced b y n = 2 d . Let us consider Q d as a static graph: it is folklore that its num b er of edges is | E ( Q d ) | = 2 d − 1 d while the sum of pairwise distances of its vertices is P u,v d Q d ( u, v ) = d · 2 2 d − 1 ≈ Θ( n 2 log n ) . F rom Lemma 3 there exists a lab elling of Q d suc h that the so cial cost is the same as the distance in the static case, that is c ( Q d ) = α · 2 d − 1 d + d · 2 2 d − 1 . It remains to show for α ≥ d a strategy profile which is a Nash equilibrium and whic h has the h yp ercub e Q d with the labelling given in the pro of of Lemma 3 as its resulting comm unication temp oral graph. Because the diameter of Q d is d , there is no p oint for any v ertex to buy a non-edge for a direct path when α ≥ d . No w, consider an y edge uv of the latter lab elling of Q d . W e use the unicity of temp oral paths in the statemen t of Lemma 3: other than the direct path using edge uv , there is no other temporal path from u to v , nor from v to u , in this lab elling. Hence, either the edge is b ought by u or v , the vertex would k eep it. Whence, this lab elling results in a Nash equilibrium. ◀ ▶ Lemma 5. L et α ≥ 2 and n ≥ 4 an inte ger. F or dynamic network cr e ation games with atomic c ost α and n players, the optimal so cial c ost is c ∗ = 2 n ( n − 1) + ( α − 2)(2 n − 4) . ther e exists a lab el ling of the diminishe d fan dF n − 1 with so cial c ost c ( dF n − 1 ) ≥ α (2 n − 4) + 1 6 ( n − 2) 3 . Mor e over, if α ≥ 1 4 n 2 then the latter c ase is the c ommunic ation temp or al gr aph of a Nash e quilibrium. Pro of. The first equality follows from Lemma 2. W e consider the follo wing (single) lab elling of the diminished ( n − 1) -fan dF n − 1 . Let v 0 , v 1 , v 2 , v 3 b e the 4 only v ertices in dF n − 1 where: they induce a cycle in dF n − 1 , v 0 has degree n − 2 , v 1 and v 3 are neighbours of v 0 ; v 1 has degree 2 . Let v 1 , v 2 , . . . , v n − 1 b e the only path resulting from the remov al of v 0 from dF n − 1 . F or 1 ≤ i < n − 1 , the edge b etw een v i and v i +1 is lab elled with n − 3 + i . The edge b et ween v 0 and v 1 is lab elled with 2 n − 4 . F or 3 ≤ i ≤ n − 1 , the edge b etw een v 0 and v i is lab elled with n − i . Moreo v er, w e consider the follo wing strategy profile. F or 1 ≤ i < n − 1 , the edge b et w een v i and v i +1 is b ought by v i . Any neigh b our of v 0 buys the edge to v 0 . V ertex v 0 do es not buy any edge. An example with n = 8 is given in the righ tmost part of Figure 2. Here, v ertex v 1 w ould be interested in buying the edge to v n 2 . Ho w ever, when the atomic cost is too exp ensiv e, that is, when α ≥ 1 4 n 2 , no v ertex would buy extra edges. Now, vertex v 1 cannot remov e its edge to v 2 otherwise it cannot reach v 2 , and the same hold for the other edge to v 0 . Likewise, vertex v 2 cannot remov e its edge to v 3 . It can how ever reach v 0 b y a temp oral path via v 1 . V ertex v n − 1 cannot remov e its edge to v 0 b ecause this is the only route to v 0 . All other v ertices v i , for 3 ≤ i < n − 1 , cannot remo v e the edge to the next v i +1 in order to reac h the higher i ’s, while they cannot remov e the edge to v 0 in order to reac h the low er i ’s. Hence, the ab ov e defined strategy profile is a Nash equilibrium. Binh-Minh Bui-Xuan, Nhat-Minh Nguy en, Sébastien Tixeuil, and Y ukiko Y amauchi 23:9 It remains to study the so cial cost of the latter Nash equilibrium. The construction cost is clearly α (2 n − 4) . F or 1 ≤ i < n − 1 , let k = n − 1 − i , the sum of shortest temporal distances from v i to the other vertices is higher than 1 + 2 + · · · + ( n − 1 − i ) = k ( k − 1) 2 . Hence, the communication cost is higher than P n − 1 k =2 k ( k − 1) 2 ≥ 1 2 P n − 1 k =2 ( k − 1) 2 ≥ 1 6 ( n − 2) 3 . ◀ 4 Conclusion and p ersp ectives F or temp oral graphs, we show that the price of anarch y with resp ect to the shortest temp oral distance when playing the dynamic netw ork creation game can b e prop ortional to the num b er of vertices. This is a v ery bad situation, hinting that the construction of netw orks should b e guided for a b etter comm unication world. When considering the price of anarch y with resp ect to the t wo other definitions of temporal distances, foremost distance and fastest distance, the situation seems similar. In b oth cases, the communication cost is usually muc h higher than the one for the shortest distance. F or instance, the h ypercub e Q 3 has 96 as optimal communication cost with resp ect to the shortest distance, 156 with resp ect to the fastest distance, and 386 with resp ect to the foremost distance. In order to b etter balance this explosion in the communication cost, b etter mo delling works should b e done ab out the optimal construction cost with resp ect to foremost or fastest distances. References 1 Eleni C. Akrida, Leszek G ¸ asieniec, George B. Mertzios, and Paul G. Spirakis. The complexit y of optimal design of temp orally connected graphs. The ory of Computing Systems , 61(4):1203–1233, 2017. doi:10.1007/s00224- 017- 9780- 3 . 2 Noga Alon, Erik D. Demaine, MohammadT aghi Ha jiaghayi, and T om Leighton. Basic netw ork creation games. In Pr o c e e dings of the Twenty-Se cond A nnual A CM Symp osium on Par al lelism in Algorithms and A rchite ctur es , SP AA ’10, page 106–113, 2010. doi:10.1145/1810479.1810502 . 3 Da vide Bilò, Sarel Cohen, T obias F riedric h, Hans Gaw endowicz, Nicolas Klo dt, P ascal Lenzner, and George Skretas. T emp oral netw ork creation games. In Pr oc e e dings of the Thirty-Se c ond International Joint Confer enc e on A rtificial Intel ligence , IJCAI ’23, 2023. doi:10.24963/ ijcai.2023/279 . 4 Da vide Bilò, Sarel Cohen, T obias F riedric h, Hans Gaw endowicz, Nicolas Klo dt, P ascal Lenzner, and George Skretas. T emp oral net w ork creation games: The impact of non-locality and terminals. In Pr o c e e dings of the 24th International Confer enc e on A utonomous A gents and Multiagent Systems , AAMAS ’25, page 334–342, 2025. 5 Da vide Bilò, Luciano Gualà, Stefano Leucci, and Guido Proietti. Lo cality-based netw ork creation games. In Pr o c ee dings of the 26th A CM Symp osium on Par al lelism in Algorithms and A r chite ctur es , SP AA ’14, page 277–286. Asso ciation for Computing Mac hinery , 2014. doi:10.1145/2612669.2612680 . 6 Da vide Bilò, Luciano Gualà, Stefano Leucci, and Guido Proietti. The max-distance net- w ork creation game on general host graphs. The or etic al Computer Science , 573:43–53, 2015. URL: https://www.sciencedirect.com/science/article/pii/S0304397515000912 , doi:10.1016/j.tcs.2015.01.044 . 7 J. A drian Bondy and Uppaluri S. R. Murt y . Gr aph The ory . Graduate T exts in Mathematics. Springer, 2008. doi:10.1007/978- 1- 84628- 970- 5 . 8 Ric hard T. Bumb y . A problem with telephones. SIAM Journal on Algebr aic and Discr ete Metho ds , 2(1):13–18, 1981. doi:10.1137/0602002 . 9 Arnaud Casteigts, Joseph G. Peters, and Jason Sc ho eters. T emp oral cliques admit sparse spanners. J. Comput. Syst. Sci. , 121:1–17, 2021. URL: https://doi.org/10.1016/j.jcss. 2021.04.004 , doi:10.1016/J.JCSS.2021.04.004 . C V I T 2 0 1 6 23:10 The Price of Universal T emp oral Reachability 10 Andreas Cord-Landwehr and Pascal Lenzner. Net work creation games: Think global – act lo cal. In Mathematic al F oundations of Computer Scienc e 2015 , pages 248–260, 2015. 11 Reinhard Diestel. Gr aph The ory , volume 173 of Gr aduate T exts in Mathematics . Springer Berlin Heidelb erg, Berlin, Heidelb erg, 6th edition, 2025. doi:10.1007/978- 3- 662- 70107- 2 . 12 Jac k Dipp el and A drian V etta. An impro v ed b ound for the tree conjecture in netw ork creation games. In Algorithmic Game The ory: 15th International Symp osium, SA GT 2022, Colchester, UK, Septemb er 12–15, 2022, Pr o c e e dings , page 241–257, 2022. 13 Alex F abrikant, Ankur Luthra, Elitza Manev a, Christos H. Papadimitriou, and Scott Shenk er. On a netw ork creation game. In Pr o c e e dings of the Twenty-Se cond Ann ual Symp osium on Principles of Distribute d Computing , PODC ’03, page 347–351, 2003. doi:10.1145/872035. 872088 . 14 Bernd Kaw ald and Pascal Lenzner. On dynamics in selfish netw ork creation. In Pr o c e e dings of the Twenty-Fifth A nnual A CM Symp osium on Par al lelism in Algorithms and A rchite ctur es , SP AA ’13, page 83–92, 2013. doi:10.1145/2486159.2486185 . 15 Da vid Kemp e, Jon M. Kleinberg, and Amit Kumar. Connectivity and inference problems for temp oral netw orks. J. Comput. Syst. Sci. , 64(4):820–842, 2002. URL: https://doi.org/10. 1006/jcss.2002.1829 , doi:10.1006/JCSS.2002.1829 . 16 Jon M. Kleinberg and Év a T ardos. Algorithm design . A ddison-W esley , 2006. Binh-Minh Bui-Xuan, Nhat-Minh Nguy en, Sébastien Tixeuil, and Y ukiko Y amauchi 23:11 Figure 3 16 Optimal lab ellings for Q 3 with foremost temp oral distance. A Games minimizing the foremost distance and fastest distance When using the foremost temp oral distance for the dynamic net work creation game, w e observ e less ex aequo than with shortest temp oral distance. F or instance, a brute-force en umeration on the hypercub e Q 3 sho ws only 16 distinct lab ellings to obtain the optimal comm unication cost, which is 386 . Essen tially , the fastest temp oral distance seems to b e similar to the foremost temp oral distance, as long as dynamic net work creation games are concerned, alb eit with a smaller communication cost. F or the hypercub e Q 3 the corresp onding optimal communication cost is 156 . C V I T 2 0 1 6
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment