PC-Diffuser: Path-Consistent Capsule CBF Safety Filtering for Diffusion-Based Trajectory Planner
Autonomous driving in complex traffic requires planners that generalize beyond hand-crafted rules, motivating data-driven approaches that learn behavior from expert demonstrations. Diffusion-based trajectory planners have recently shown strong closed-loop performance by iteratively denoising a full-horizon plan, but they remain difficult to certify and can fail catastrophically in rare or out-of-distribution scenarios. To address this challenge, we present PC-Diffuser, a safety augmentation framework that embeds a certifiable, path-consistent barrier-function structure directly into the denoising loop of diffusion planning. The key idea is to make safety an intrinsic part of trajectory generation rather than a post-hoc fix: we enforce forward invariance along the rollout while preserving the diffusion model’s intended path geometry. Specifically, PC-Diffuser (i) evaluates collision risk using a capsule-distance barrier function that better reflects vehicle geometry and reduces unnecessary conservativeness, (ii) converts denoised waypoints into dynamically feasible motion under a kinematic bicycle model, and (iii) applies a path-consistent safety filter that eliminates residual constraint violations without geometric distortion, so the corrected plan remains close to the learned distribution. By injecting these safety-consistent corrections at every denoising step and feeding the refined trajectory back into the diffusion process, PC-Diffuser enables iterative, context-aware safeguarding instead of post-hoc repair…
💡 Research Summary
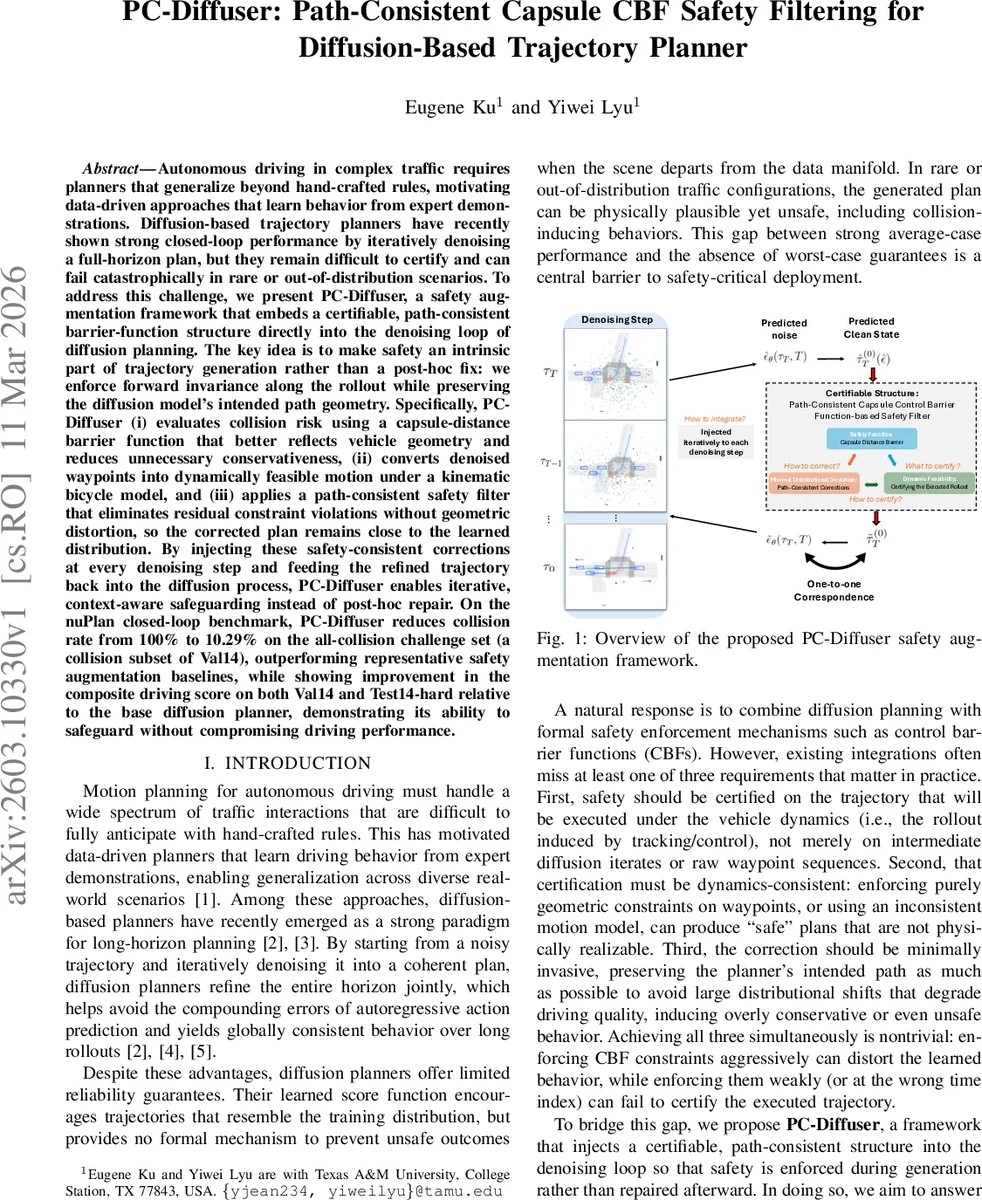
PC‑Diffuser introduces a safety‑augmentation framework that tightly integrates a certifiable control barrier function (CBF) into the denoising loop of diffusion‑based trajectory planning for autonomous driving. The authors identify three practical requirements for safety in this context: (1) the object of certification must be the executed rollout under vehicle dynamics, not intermediate waypoints or diffusion iterates; (2) the certification must be dynamics‑consistent, meaning that safety constraints are enforced on the actual control inputs of a realistic vehicle model; and (3) safety corrections should be minimally invasive, preserving the planner’s intended path geometry to avoid large distributional shifts that could degrade driving quality.
To satisfy these requirements, the paper proposes three complementary components. First, a capsule‑distance barrier function is defined: each vehicle is represented by a line segment (the longitudinal axis) expanded by a radius equal to half the vehicle width, forming a capsule. The barrier h_j(x) = d_cap(S_ego(x), S_j(x_j)) – d_safe measures the minimum distance between the ego capsule and a neighbor capsule minus a safety margin. The authors prove that, when the closest‑point pair is unique, this barrier is continuously differentiable, enabling its use in a standard CBF‑QP formulation.
Second, because diffusion planners output waypoints rather than control commands, the framework adds an explicit waypoint‑to‑control interface. A linear‑quadratic regulator (LQR) tracks the predicted clean trajectory ˆτ(t)₀, producing a nominal control u_nom,k = (a_nom,k, δ_nom,k) that respects the kinematic bicycle model. These nominal controls serve as the reference input u_nom in the CBF‑QP, allowing the safety filter to adjust the actual control while remaining grounded in the vehicle’s dynamics.
Third, the authors enforce “path‑consistency” in the safety correction. Steering δ is fixed to its nominal value δ_nom,k, and only the longitudinal acceleration a is allowed to change in order to satisfy the CBF constraints. This design ensures that the spatial path (the lateral trajectory) remains essentially unchanged, while speed modulation provides sufficient authority to avoid collisions. The resulting 1‑D quadratic program can be solved efficiently as an equivalent velocity‑level problem.
The complete PC‑Diffuser algorithm proceeds iteratively: at each diffusion step t, the network predicts noise, a clean trajectory estimate ˆτ(t)₀ is formed, the PC‑CBF filter corrects it for safety, and the corrected trajectory is fed back into the diffusion process for the next denoising iteration. This “iterative, context‑aware safeguarding” replaces brittle one‑shot post‑hoc filters and allows the diffusion planner to co‑adapt to safety constraints.
Empirical evaluation on the nuPlan closed‑loop benchmark demonstrates the effectiveness of the approach. On the all‑collision challenge set (Val14), the vanilla diffusion planner suffers a 100 % collision rate, whereas PC‑Diffuser reduces it to 10.29 %. Moreover, on both the standard Val14 and the harder Test14‑hard splits, PC‑Diffuser improves the composite driving score relative to the baseline, indicating that safety gains do not come at the expense of overall driving performance. The method outperforms several baselines, including score‑guided SafeDiffuser, constrained denoising SafeFlow, real‑time CBF‑QP filters, MPC‑CBF, and reachability‑based fallback schemes such as PACS and RAIL.
In summary, PC‑Diffuser is the first framework that embeds a dynamics‑consistent, capsule‑based CBF and a path‑consistent correction directly into the diffusion planning loop, providing formal safety guarantees while preserving the learned trajectory distribution. Its design bridges the gap between high‑performance data‑driven planners and the stringent safety certification required for real‑world autonomous driving.
Comments & Academic Discussion
Loading comments...
Leave a Comment