Characterizing Healthy & Post-Stroke Neuromotor Behavior During 6D Upper-Limb Isometric Gaming: Implications for Design of End-Effector Rehabilitation Robot Interfaces
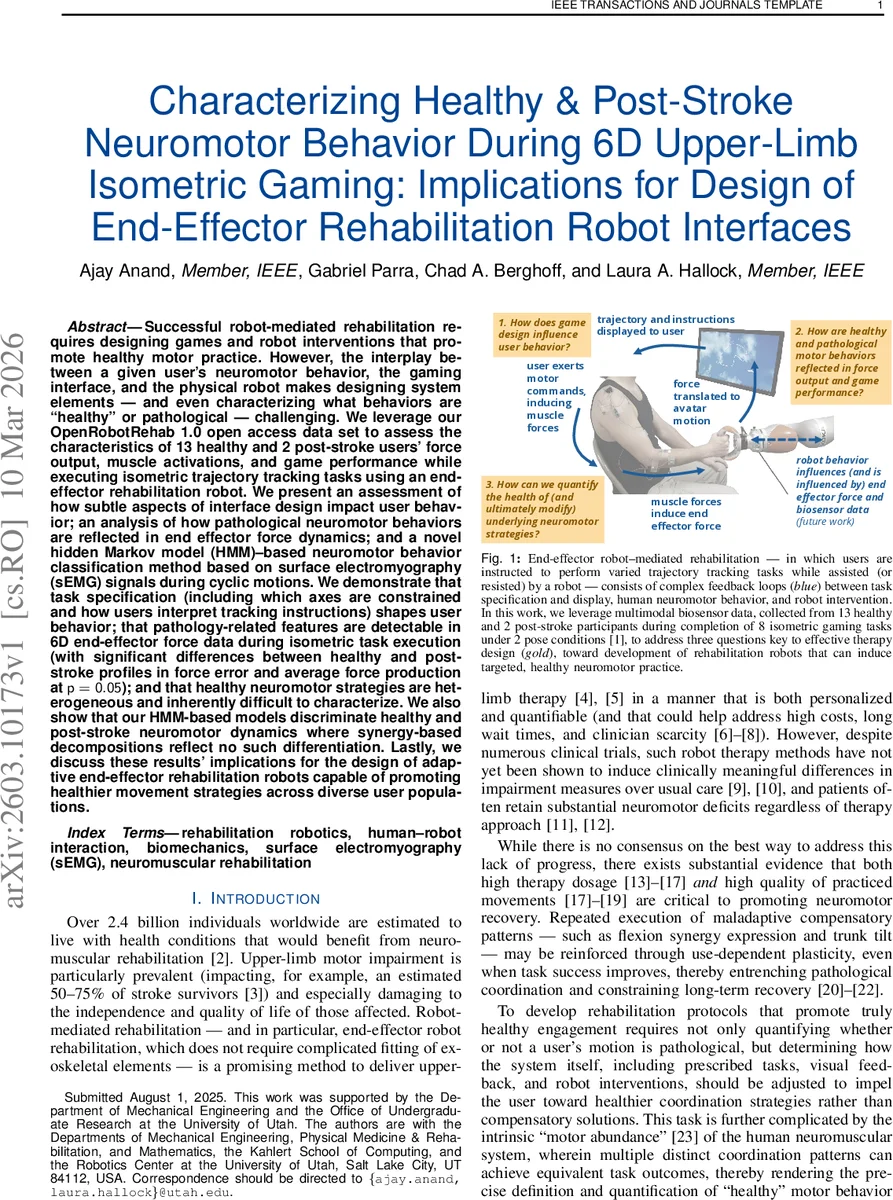
Successful robot-mediated rehabilitation requires designing games and robot interventions that promote healthy motor practice. However, the interplay between a given user’s neuromotor behavior, the gaming interface, and the physical robot makes designing system elements – and even characterizing what behaviors are “healthy” or pathological – challenging. We leverage our OpenRobotRehab 1.0 open access data set to assess the characteristics of 13 healthy and 2 post-stroke users’ force output, muscle activations, and game performance while executing isometric trajectory tracking tasks using an end-effector rehabilitation robot. We present an assessment of how subtle aspects of interface design impact user behavior; an analysis of how pathological neuromotor behaviors are reflected in end-effector force dynamics; and a novel hidden Markov model (HMM)-based neuromotor behavior classification method based on surface electromyography (sEMG) signals during cyclic motions. We demonstrate that task specification (including which axes are constrained and how users interpret tracking instructions) shapes user behavior; that pathology-related features are detectable in 6D end-effector force data during isometric task execution (with significant differences between healthy and post-stroke profiles in force error and average force production at $p=0.05$); and that healthy neuromotor strategies are heterogeneous and inherently difficult to characterize. We also show that our HMM-based models discriminate healthy and post-stroke neuromotor dynamics where synergy-based decompositions reflect no such differentiation. Lastly, we discuss these results’ implications for the design of adaptive end-effector rehabilitation robots capable of promoting healthier movement strategies across diverse user populations.
💡 Research Summary
The paper investigates how the design of a 6‑degree‑of‑freedom (6 DOF) isometric gaming interface influences neuromotor behavior in healthy individuals and post‑stroke patients, and how such behavior can be detected and classified using force and electromyographic data. Using the publicly available OpenRobotRehab 1.0 dataset, the authors recorded 8‑channel surface EMG (sEMG), 6‑DOF force‑torque, and game performance metrics from 13 healthy participants and two chronic pediatric stroke survivors while they performed eight different trajectory‑tracking tasks under two arm‑pose conditions.
First, the study examines the impact of subtle interface choices—specifically which force axes are constrained and how the tracking instruction is phrased—on user behavior. Results show that when axes are left unconstrained or when the goal description is ambiguous, participants generate higher co‑contraction, larger force variability, and divergent EMG patterns. Stroke participants are especially sensitive to these design variations, exhibiting greater mean force error and higher variability on constrained axes, indicating a reliance on explicit task cues.
Second, the authors demonstrate that pathology‑related signatures are observable in the 6 D end‑effector force data alone. Statistical analysis (p = 0.05) reveals significant differences between healthy and stroke groups in both mean absolute force error and average force magnitude, with the most pronounced deficits in rotational axes where stroke subjects display reduced amplitude and increased fluctuation. These force‑based metrics provide a direct, robot‑measurable biomarker of motor impairment that can be leveraged for real‑time feedback and adaptive control.
Third, the paper introduces a novel hidden Markov model (HMM) approach for classifying neuromotor dynamics from sEMG time series. Traditional muscle‑synergy analysis, which reduces EMG to a few co‑activation modules, failed to separate the groups effectively (≈68 % accuracy with linear discriminant analysis). In contrast, HMMs with 3–5 hidden states per task achieved ≈92 % cross‑validated classification accuracy. The hidden states corresponded to temporally localized patterns such as excessive shoulder flexion or trunk lean—compensatory motions that are clinically relevant but difficult to capture with static synergy decomposition.
Based on these findings, the authors propose adaptive robot control strategies: (i) dynamically adjusting assistance or resistance on axes where excessive force is detected to suppress maladaptive co‑contraction; (ii) using HMM‑derived state detections to trigger visual or haptic feedback that guides the user toward healthier muscle activation patterns; and (iii) clarifying task specifications (axis constraints and goal phrasing) to reduce interpretive ambiguity.
Overall, the study contributes three key insights: (1) fine‑grained interface design substantially shapes neuromotor output; (2) 6‑DOF force signatures serve as reliable indicators of pathological motor behavior; and (3) HMM‑based sEMG classification outperforms conventional synergy methods, offering a practical tool for real‑time discrimination of healthy versus impaired motor strategies. These results inform the development of next‑generation end‑effector rehabilitation robots that can deliver personalized, quality‑focused therapy rather than merely increasing dosage.
Comments & Academic Discussion
Loading comments...
Leave a Comment