On the airspace complexity metrics for predecessor-follower operations
This technical note proposes a novel airspace complexity metric that quantifies the air traffic controller workload and coordination effort for pairwise predecessor-follower aircraft operations in cruise. The pairwise dynamic workload (PDW) is propos…
Authors: Lucas Souza e Silva, Luis Rodrigues
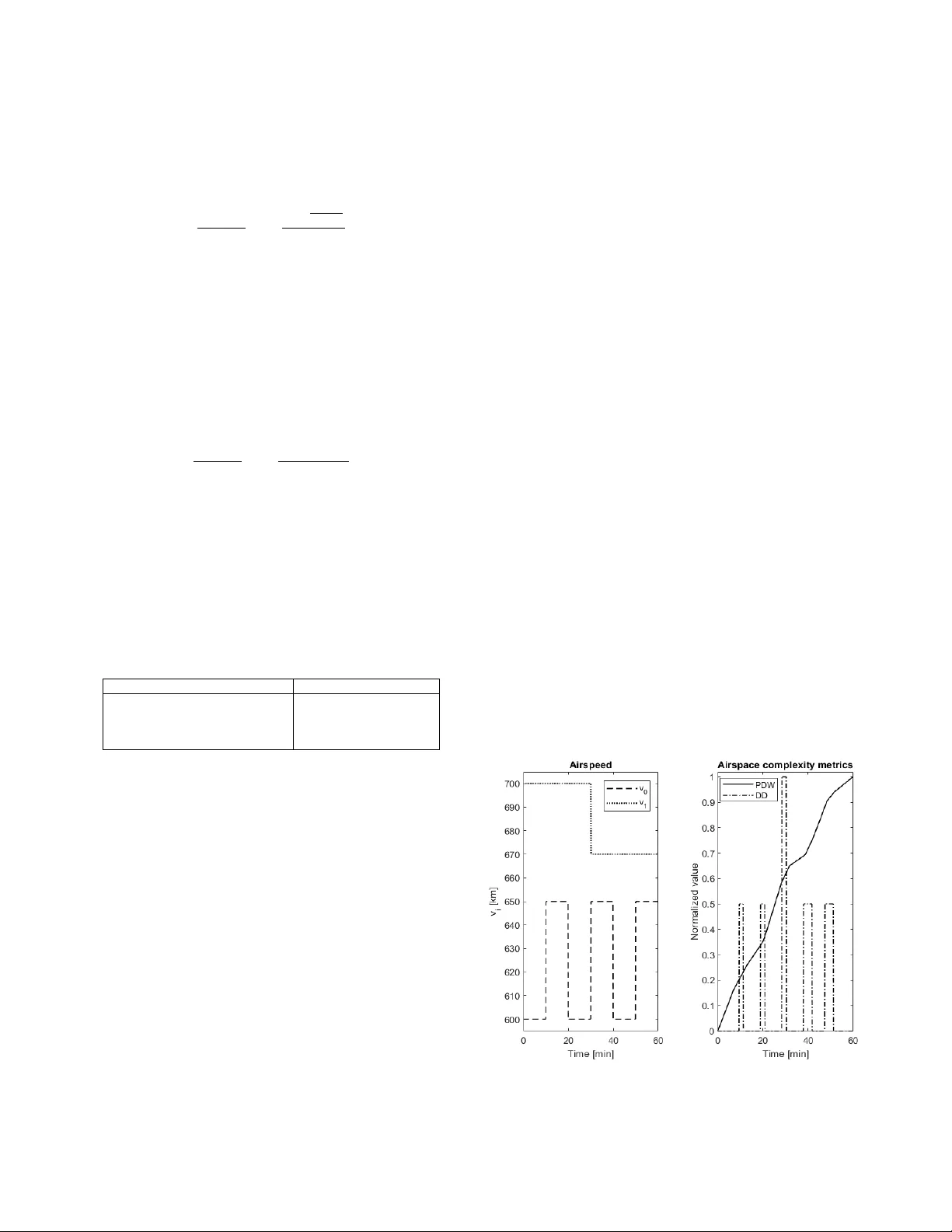
On the airspace comple xity metrics for predecessor -follo wer operations Lucas Souza e Silv a and Luis Rodrigues Department of Electrical and Computer Engineering Concor dia University Montreal, Canada Abstract —This technical note proposes a novel airspace com- plexity metric that quantifies the air traffic controller workload and coordination effort for pairwise pr edecessor -follo wer air craft operations in cruise. The pairwise dynamic workload (PD W) is proposed as a continuous function that depends on the relevant parameters of these operations, such as the aircraft separation and separation rate. A comparison of this metric with the dynamic density (DD) shows that it is capable of continuously evaluating the variation of airspace complexity over time and monitoring the aircraft parameters that might lead to conflicts. This metric can be used to support the implementation of autonomous and supervised air craft procedures, to achieve a more structured and coordinated airspace. I . I N T RO D U C T I O N The airspace is becoming more comple x due to the growing demand for both domestic and international trav el. As a result, the augmented airspace complexity imposes greater strain on the efficiency of air traffic management (A TM). This strain is particularly intense on the air traf fic control operators (A TCOs), who must perform high-pressure, time- sensitiv e tasks that call for sustained attention over extended work shifts [1]. Moreov er , ne w transportation technologies, such as advanced/urban air mobility (AAM/U AM) [2], re- quire integration with the traditional air traf fic control (A TC) en vironment. Thus, achieving a harmonized and coordinated air traffic management becomes increasingly challenging. One approach to alleviate these challenges is the use of structured and collaborativ e aircraft procedures. Sev eral of these pro- cedures can be characterized as platoons of pairwise prede- cessor–follower operations, in which safe separation between aircraft is maintained throughout the flight. Examples include aircraft sequencing based on scheduling in terminal areas and air mobility vehicles operating within designated air corridors. As the complexity of the airspace continues to grow , these operations necessitate automated or supervised A TC strate gies to ensure their effecti ve management. Se veral metrics hav e been proposed in the literature to quantify airspace comple xity , depending on the type of operations of interest. For pairwise aircraft operating in cruise, it is essential to consider their horizontal separation and the rate at which this separation changes over time. References [3], [4], [5] propose dif ferent complexity metrics and analyses that account for horizontal separation and separation rate. Ho wev er , [3] and [4] do not provide a closed-form relation among these parameters, while [5] only considers the number of aircraft in a sector that changed speed or are within unsafe distances from others, without capturing their continuous ev olution over time. T o address these limitations, this technical note introduces a nov el pairwise dynamic workload (PDW) metric for prede- cessor–follower aircraft operations. The main contribution is the formulation of the PDW as a dynamic airspace comple xity indicator that systematically captures the relev ant operational variables gov erning pairwise interactions. By e xplicitly link- ing aircraft dynamics with workload-related airspace factors, the proposed metric provides a structured and analytically tractable frame work for assessing complexity in pairwise pre- decessor–follower configurations. The remaining of this technical note is structured as follows. Section II defines the PD W metric in the context of pairwise aircraft operations in cruise. Section III sho ws the compar- ison of the PD W with the dynamic density (DD) metric in simulated scenarios and section IV concludes this note. I I . P A I RW I S E DY NA M I C W O R KL O A D ( P D W ) T o dynamically describe the variation of the airspace com- plexity associated to pairwise predecessor-follo wer aircraft operations in cruise, it is assumed that both aircraft are flying at the same altitude. W e propose a pairwise dynamic workload (PD W) function χ i,i − 1 that satisfies the following conditions: • The function χ i,i − 1 is continuous and strictly positive for all t ∈ [0 , t f ] , where t f denotes the duration of the pairwise operation. • The value of χ i,i − 1 increases as the inter-aircraft separa- tion d i,i − 1 decreases, and decreases when d i,i − 1 increases. • W e define the aircraft separation rate as ˙ d i,i − 1 = v i − 1 − v i , where v i − 1 and v i are the predecessor and the follower aircraft airspeeds, respectively . An increase in the separation rate ˙ d i,i − 1 should increase the deri vati ve of χ i,i − 1 with respect to d i,i − 1 . Conv ersely , a decrease in ˙ d i,i − 1 should reduce this deriv ative. Definition 1 (P airwise dynamic workload): Giv en the sep- aration d i,i − 1 and separation rate ˙ d i,i − 1 of two aircraft in predecessor-follo wer operations of duration t f and giv en the maximum separation rate ˙ d max > 0 , with ˙ d max > | ˙ d i,i − 1 | ∀ t ∈ [0 , t f ] , the proposed pairwise dynamic workload (PD W) function χ i,i − 1 is χ i,i − 1 = 1 d i,i − 1 1 − ˙ d i,i − 1 ˙ d max (1) Note that χ i,i − 1 > 0 for any finite d i,i − 1 , and it is in- versely proportional to the inter-aircraft separation, as smaller separations require increased attention and workload from the A TCOs. This behavior is confirmed by the deri vati v e in (2), where the numerator is always positi ve, which makes the deriv ative of χ i,i − 1 with respect to d i,i − 1 always negati ve. ∂ χ i,i − 1 ∂ d i,i − 1 = − 1 − ˙ d i,i − 1 ˙ d max d 2 i,i − 1 (2) Moreov er , a negati ve closure rate ˙ d i,i − 1 indicates that the aircraft are con ver ging, thereby increasing the coordination workload for the A TCOs and contributing to greater airspace complexity . In contrast, a positi ve closure rate implies that the aircraft are div erging, which reduces the controller’ s work- load and consequently lowers the associated complexity . This interpretation can be confirmed by inspecting the computed deriv ative in (3). The deri v ativ e of χ i,i − 1 with respect to ˙ d i,i − 1 is always negati ve, given that the denominator in (3) is always positiv e. ∂ χ i,i − 1 ∂ ˙ d i,i − 1 = − 1 d i,i − 1 ˙ d max (3) I I I . S I M U L A T I O N R E S U LT S Simulations were conducted in MA TLAB on a laptop with a configuration of 16 GB RAM and an 11 th Gen Intel R Core T M i5-1135G7 2.40GHz CPU. A comparison of the proposed PDW with other airspace complexity metrics from the literature is shown in T able I. T ABLE I C O MPA R IS O N O F A I RS PAC E C O M PL E X I TY M E T RI C S F O R P A IR WI S E A I RC R A F T O P ER ATI O N S Parameter [3] [4] [5] PD W Horizontal Separation ✓ ✓ ✓ ✓ Separation Rate ✓ ✓ ✓ ✓ Closed-form ✗ ✗ ✓ ✓ T emporal evolution of parameters ✗ ✓ ✗ ✓ The metrics proposed in [3] and [4] do not hav e a closed- form equation that relates the aircraft separation and sepa- ration rate. For this reason, the proposed PDW metric will be ev aluated alongside the dynamic density (DD) measure introduced in [5]. The comparison is conducted for two distinct scenarios in volving a pairwise predecessor–follower procedure ov er a 60-minute duration. In these scenarios, v 0 ( t ) and v 1 ( t ) denote the airspeed of the predecessor and the follower aircraft, respecti vely . The profiles and values of v 0 ( t ) and v 1 ( t ) were selected to generate multiple airspeed v ariations while maintaining a constant sign of ˙ d i,i − 1 . The two scenarios are described below . 1) Scenario 1, aircraft conv erging: the predecessor and follower aircraft airspeeds are, respectiv ely , v 0 ( t ) = ( 600 km / h , for t ∈ [0 , 10) , [20 , 30) , [40 , 50) 650 km / h , for t ∈ [10 , 20) , [30 , 40) , [50 , 60) (4) v 1 ( t ) = ( 700 km / h , for t ∈ [0 , 30) 670 km / h , for t ∈ [30 , 60) (5) 2) Scenario 2, aircraft di verging: the predecessor and fol- lower aircraft airspeeds are, respectiv ely , v 0 ( t ) = ( 700 km / h , for t ∈ [0 , 30) 670 km / h , for t ∈ [30 , 60) (6) v 1 ( t ) = ( 600 km / h , for t ∈ [0 , 10) , [20 , 30) , [40 , 50) 650 km / h , for t ∈ [10 , 20) , [30 , 40) , [50 , 60) (7) Both PD W and DD metrics were computed for the two scenarios and scaled using min–max normalization, yielding values between 0 (minimum) and 1 (maximum), as sho wn in Figure 1 and Figure 2. The left plots present the airspeed profiles for each scenario, while the right plots depict the ev o- lution of airspace complexity metrics over time. In Scenario 1, v 1 ( t ) > v 0 ( t ) , leading to the conv ergence of the two aircraft, whereas in Scenario 2, v 1 ( t ) < v 0 ( t ) , resulting in increasing separation. In both scenarios, DD produced identical values, since it only accounts for the number of aircraft that changed airspeed within each 2-min interval. In contrast, the PDW metric captured the continuous influence of both the separation and its rate of change on airspace complexity , increasing when the aircraft are con ver ging and decreasing when they are di ver ging. Furthermore, the rate of separation between the aircraft w as observed to af fect the slope of the PD W curv e, as higher separation rates lead to a steeper gradient. Unlike DD, PD W reflects gradual changes and transient beha viors in pairwise aircraft interactions. Moreover , PD W highlights situations where conflicts may be emer ging e ven before DD detects them. Fig. 1. Comparison of PD W and DD, scenario 1 Fig. 2. Comparison of PD W and DD, scenario 2 I V . C O N C L U S I O N S This technical note introduces the pairwise dynamic work- load (PD W) as an airspace complexity metric. T o capture the continuous impact of pairwise operations on airspace structure and controller workload, the PD W is a defined as a continuous function that depends on the aircraft separation and separation rate. The simulation results show that the PDW models incremental variations in the airspace parameters that configure pairwise operations and may anticipate potential conflicts faster when compared to the dynamic density metric. This metric may support the air traffic management by pro- viding a dynamic and continuous complexity metric to aid the integration of autonomous or supervised aircraft procedures to achiev e a more structured and coordinated airspace. R E F E R E N C E S [1] E. Steel and S. Ember , Drunk and Asleep on the Job: Air T raffic Contr ollers Pushed to the Brink . [Online]. A v ailable: https : / / www . nytimes . com / 2023 / 12 / 02 / business/air - traf fic- controllers- safety .html [2] F AA, “Urban air mobility (uam) concepts of operation v2.0, ” 2023. [Online]. A vailable: https : / / www. faa . gov / sites / faa . gov / files / Urban % 20Air % 20Mobility % 20 % 28U AM % 29 % 20Concept % 20of % 20Operations % 202 . 0 0.pdf [3] W . Pa wlak, C. Brinton, K. Crouch, and K. Lancaster , “A frame work for the ev aluation of air traf fic control complexity , ” in AIAA Guidance, Navigation, and Con- tr ol Confer ence , San Diego, USA, Jul. 1996. [Online]. A v ailable: https://doi.org/10.2514/6.1996- 3856 [4] G. B. Chatterji and B. Sridhar , “Measures for Air Traf fic Controller W orkload Prediction, ” in AIAA Aircr aft T ech- nology , Inte gration and Operations F orum , Los Angeles, USA, Oct. 2001. [Online]. A v ailable: https :// doi.org/ 10. 2514/6.2001- 5242 [5] I. Laudeman, S. Shelden, R. Brannstrom, and C. Brasil, Dynamic Density: An Air T raffic Management Metric . [Online]. A vailable: https : / / ntrs . nasa . gov / citations / 19980210764
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment