Availability of Aerial Heterogeneous Networks for Reliable Emergency Communications
We investigate network availability (NA) in aerial heterogeneous networks (AHetNets) for effective emergency rescue, where diverse delay-constrained communication services must be provided to user equipments (UEs) with varying mobility. The heterogen…
Authors: Teng Wu, Ji, ong Li
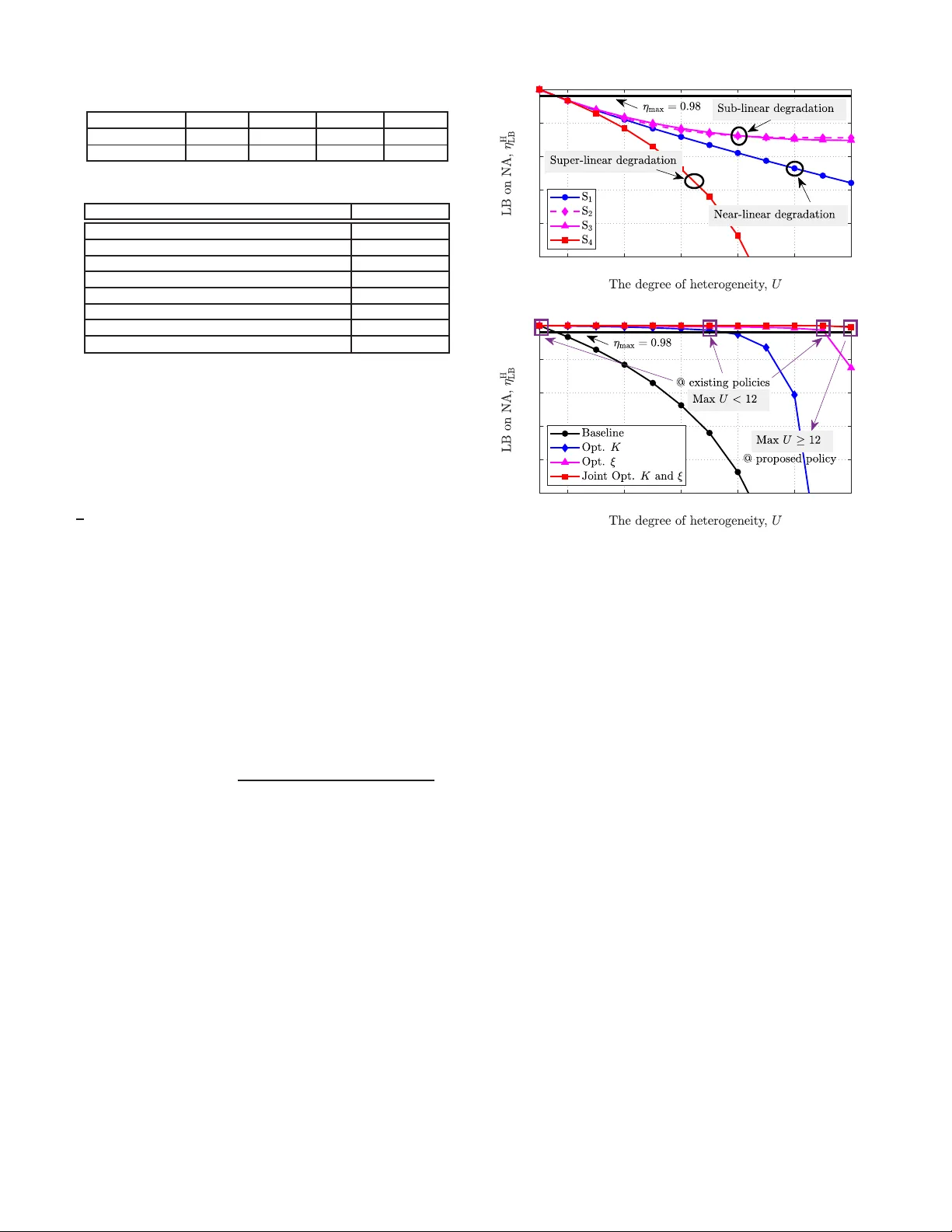
A v ailabil ity of Aerial Heterogeneous Networks for Reliable Emer genc y Commun icati ons T eng W u † ‡ , Ji a ndong Li † , Ju nyu Liu † , Min Sheng † , M ohammadal i Moha mmad i ‡ , Hien Quoc Ngo ‡ , and Mich ail Matthaiou ‡ † State Ke y Lab oratory of ISN, Institute of Informatio n Science, Xidian University , Xi’an, Shaanx i, 7 10071 , China ‡ Centre for W ireless Inn ovation (CWI), Queen ’ s University Belfast, Belfast, BT3 9DT , United Kingdom Email: t.wu@stu.xid ia n .edu.cn Abstract —W e in vestiga te network a vailability (NA) in aerial heterogeneous netw orks (AHetNets) f or effectiv e emergency res- cue, where div erse delay-constrained communication services must be prov ided to user equipments (UEs) with va rying mobili t y . The heterogeneity in delay constraints and UE mobility intro- duces resource allocation conflicts and imbalances, w h ich u n- dermine communi cation reliability and challenge NA. Although unified resource allocation (URA) can miti gate th ese issues, it remains unclear whether NA can b e sustain ed u nder such diverse conditions. T o address this, we deriv e expressions for the lower bound (LB) on NA in AHetNets under URA. Our analysis rev eals that extended heterogeneity signifi cantly degrades the L B du e to resource limitations—even when the heter ogeneity st ems fr om additional services und er less stringent delay constraints (LSDC) or fr om UEs with lower mobility . T o o vercome this degradation, we fo rmulate and solv e a joint optimization problem fo r the number of UEs sharing time-frequency resources ( K ) and pilot length ( ξ ), aiming to enhance the LB by improving spatial, frequency , and temporal resour ce efficiency . S imulation results validate our analysis and demonstrate that jointly optimizin g K and ξ enables AHetNets t o achiev e the target NA un der greater heterogeneity , outperform ing existin g resource allocation policies. Index T e rms —Aerial heterogeneous n etwork, diverse delay constraints, diverse mobility , reliable emerg ency communication. I . I N T RO D U C T I O N Providing emergency communicatio ns to coun te r act the detrimental effects of physical disasters is a key use case of sixth-ge neration ( 6G) globa liza tio n [1]. Benefiting from flexibility and ada p tability , unmann ed aerial vehicle (UA V) commun ications are particularly su itable f or eme rgen cies [2]. On one hand , U A Vs equip ped with th ermal imagers, infrar e d scanners, a n d came r as as aerial UEs (A UEs) can collect vital informa tio n for search a n d rescue. On the other hand , aerial networks with UA V -moun ted flying access po ints (F APs) can be swiftly deployed f or p roviding emergency commun ications to A UEs and ground UE s (GUEs) of r escuers and surviv o rs. Despite th eir poten tial, emergen cy commu nication ser vices for disaster rescue face fo r midable ch allenges. Unreliab ility arises from dynam ic c h annels due to F A P movemen t, wireless fading, and service burstiness [ 3], [4]. Add itionally , A UEs an d This work is supported in part by Natural Science Foundatio n of China (Grant No. 62121001), in part by Ke y Research and De vel opment Program of Shannxi (Grant No. 2024CY2-GJHX-82), and in part by China Scholarship Council (Student ID: 202506960051). The wor k of M. Matthaiou was supported by the European Research Council (ERC) under the European Union’ s Horizon 2020 research and innov ation programme (grant agreemen t No. 101001331). GUEs exhibit distinct m obility and r e quire commu nications under d i verse de lay constraints—fro m secon d-level d e lays for real-time media to sub-millisecond delays for rem ote contro l [2]. Th is heterogen eity causes re so urce allo c ation conflicts an d imbalances [3], u ndermin in g reliability . As a result, the NA of AHetNets is hin dered from sup porting effectiv e emergen cy rescue, where NA is the prob ability that the qua lity-of-serv ice (QoS) requ irements, in terms of d elay and reliab ility , for ea c h UE’ s service are satisfied [4]. Recent works sugge st that coo rdinated m ulti-point (CoM P) can address unr eliability fro m dyn amic chan nels, wireless fading, an d serv ice burstiness, ev en wh en A UEs and GUEs coexist [4 ]–[6]. E ffecti ve r e so urce allo cation u nder Co M P for div erse delay con straints [7] an d UE mo bility [8 ] can enha n ce transmission rates and reliability . Howe ver, existing works largely overlook how de la y constrain ts and UE mobility jointly affect N A. Mo st studies f o cus o n a single delay con straint or UE mob ility type [4 ], and a lthough URA appears suitable for heteroge n eous networks [9], its viability unde r diverse delay and m obility r emains un clear . Consequen tly , N A in AHetNets is n ot yet we ll understoo d, and current resou r ce allocation strategies cann ot be directly applied to achieve the target NA. Motiv ated b y the above, this work inv estigates the N A of F AP CoMP-enab led AH e tNe ts for reliable emergency co m - munication (REC) ser v ices under a URA schem e. The main contributions of this pap er are as f o llows: • W e deriv e a LB on N A fo r pe r forman ce analysis and show that it is si gnificantly degraded u nder extended heteroge n eity due to red uced resou rces in URA, even when heter ogeneity stems from additional REC service s under LSDC or from UEs with lower mo bility . • Our analysis reveals that jointly optimizing th e num ber of UEs sh a ring time - frequen cy re sources ( K ) and pilot length ( ξ ) can effecti vely imp rove spatial, frequ ency , and temporal resource efficiency , th ereby enh ancing the LB on NA. Build in g on this insight, we fo rmulate a nd solve a joint o p timization pr oblem for K and ξ to enhance NA. • Our simulation results confirm that the target N A is achiev ab le e ven u nder greater heterogeneity by join tly optimizing K and ξ , o utperfo rming existing p olicies. Notations : E X [ · ] den otes the expectation with respect to (w .r .t.) the rando m variable (R V) X ; P X ( · ) denotes the prob- ability w .r .t. the R V X ; ⌊·⌋ an d ⌈·⌉ are the floor and ceil op era- tors, respectively; 1 [ Y ] den otes the indicato r function of event Y , where 1 [ Y ] = 1 if event Y is true, and 1 [ Y ] = 0 o th erwise; z ∼ C N (0 , σ 2 ) d enotes a complex Gaussian R V z with zero mean an d variance σ 2 ; f Q − 1 ( · ) is th e inverse Q-functio n , while the Q-functio n is f Q ( x ) = 1 √ 2 π R ∞ x exp( − y 2 2 ) dy . Finally , J 0 ( · ) is the zeroth-o rder Bessel fun ction of the first kind . I I . S Y S T E M M O D E L A. Network Mod e l W e consid e r an u plink F AP Co MP-enabled AHetNet, wh ich consists of L fixed-wing U A V -mounted single-antenn a F APs and M sing le-antenn a UEs with di verse mobility . In gen e r al, M ≫ L . All F APs a re conne c te d to a central pr ocessor (CP) via wirele ss fronthaul links for centralized sig n al pr o cessing, while the CP ca n be deployed on th e g round or in th e sky [4]. W e consider that the disaster occur s in a circular area with a radius W D , which is d enoted as the disaster area A . Th e UEs includ e A UEs and GUEs, where GUEs are ran domly distributed within A , while A UEs are ran domly d istributed over the altitude ra n ge H = [ h min , h max ] above A . Mo r eover , h min and h max are the min im um an d maximum altitudes where A UEs are located , respectively . All F APs fo llow pe- riodic circular flight tr ajectories. The flight altitude, radius, and velocity of each F AP are h F , W F , and v F , respectively . Thus, the fligh t period of each F AP is T = 2 π W F / v F . W e equally di vide T into I time slots with a duration T S , while T S is g enerally ch o sen as a value less than the cohe r ence interval T C , i.e., I = T / T S , t = iT S , ∀ t ∈ [ 0 , T ] , ∀ i ∈ [0 , I ] , and T S ≤ T C . T he U E m o bility in AHetNets is ch aracterized by the rela tive velocity v r between UEs and F APs. W e con sider that all F APs have the same v r w .r .t. the sam e UE, while v r may v a r y across different UEs du e to diverse m obility . Moreover , we consider th at each transm ission d istance fro m UEs to F APs d = p d 2 H + h 2 is constant during o ne time slot and varies between different time slots [ 4 ], where d H and h are the ho rizontal and vertical distances from UEs to F APs, respectiv ely . Th e farthest transmission distance fr om UEs to F APs is ˜ d = q ˜ d 2 H + ˜ h 2 , where ˜ d H = 2 W D + 2 W F and ˜ h = max { h F , | h F − h min | , | h F − h max |} are the farthest hori- zontal an d vertica l distances from UEs to F APs, respectively . B. T raffic Mod el an d Scheduling In gen eral, RECs are d elay-sensitive services with bursti- ness, where dela y constraints primarily inc lu de LSDC an d more stringent delay constraints (MSDC) categories [2 ], [3], [10]. Th e serv ice burstiness ca n b e ch aracterized by the variance o f the ra n dom arriv al rates [3]. Th u s, the arriv al processes of REC serv ices are mode led as stochastic arriv a l processes with average arrival rate θ ς and a r riv al rate variance σ 2 ς , ς ∈ { LS , MS } , where L S and MS den ote REC servic e s unde r LSDC an d MSDC, respectively . T o man age unre liab ility due to bursty serv ices, we conside r de ploying a fir st-c o me-first- serve server in th e system f or uplink tr affic scheduling , which is a com mon and effectiv e method [3], [4]. As a result, there will be a queue a t the buf fer in th e UE. C. Cha nnel Mo d el W e consid e r both quasi-static and time-varying chann els due to diverse d e la y co nstraints a nd UE mobility [4], [11]. 1) Qu asi-Static Channel: The ch annels from UEs to F APs are independ ent identically distributed (i.i.d.) du ring d ifferent coheren ce intervals and can be mod eled as [4] g = p β ψ , (1) where ψ de n otes th e small-scale and shad ow fading that is modeled a s κ - µ sha d owed fading ; β denotes the path loss th at is assumed to be known a priori and modeled as β ( d ) = A d − 2 ; A (dB) = − 20 lo g 10 (4 π / λ ) den otes th e path lo ss at 1 m with wa veleng th λ = v L / f c ; f c is the ca r rier f requency , while v L is the speed of light. 2) T ime-V aryin g Chan nel: The chan nels fr om UE s to F APs between adjacent coh erence inter vals are correla te d . W e ap ply a first-order auto-regressive (AR) m odel to portra y the channel correlation [11]. In that, the chann els can be mod eled as g = e c g − 1 + p 1 − e 2 c e unc , (2) where e unc ∼ C N (0 , β ) denotes the innovation compo n ent during one coher e nce interval that is uncorrela ted with the channel during the previous cohere n ce interval g − 1 ; e c is the temporal correlation co efficient between ad jacent c oherence intervals th a t c an be calculated by using Jakes fading model. Specifically , e c = J 0 (2 π f D t s ) , wh ere t s is the sampling tim e and f D = v r f c / v L is the co rrespond ing Do ppler frequ ency shift of v r between UEs and F APs. Fin ally , the co herence interval is T C ( v r ) , 9 v L /(16 π f c v r ) [4]. Note that (2) is ap - plicable for the ch annels d uring non -initial coher ence intervals of each ser vice, while the channels durin g the in itial coher ence interval of each service are mo deled as (1 ). I I I . P R E L I M I N A RY A N A LY S I S A. Qo S Req uir eme nts For each UE’ s uplink REC service, th e QoS req uiremen ts, in terms of d elay and reliability , are characterize d by the to tal delay b ound in the u plink D ς max and the r equiremen t of the uplink overall packet loss (uOPL) p robability ε ς max [4]. Thu s, the QoS r e quiremen ts ( D ς max , ε ς max ) fo r e ach UE’ s uplink REC service can be satisfied under the following co nstraints: D ς ≤ D ς max , ¯ ε ς ≤ ε ς max , (3) where D ς is the total d elay in the up link; ¯ ε ς = E ψ ε ς ψ is the uOPL probab ility a verag ed over th e small-scale and shadow fading; ε ς ψ is th e uOPL p r obability und er instantaneo us fading; ς ∈ { LS , MS } . Serv ices und er both M SDC and LSDC exhibit div erse delay co nstraints, wher e D MS max is sub -millisecond lev el and D LS max is millisecond lev el o r hig her [1 0]. According to the 3 r d Generatio n Partnership Project (3GPP) specifications, the total de lay in the u plink in cludes, but is not limited to, the transmission delay , q ueueing delay , pro pagation delay , as well as c o ding and processing delay [12]. This paper focu ses on ma naging spatial, frequen cy , an d temporal resources, which pertain to the tran smission delay and queu e- ing delay [ 3], [ 4]. Therefo re, this p a per co nsiders th at the total uplink de lay D ς consists o f the up link transmission delay D u and queu e ing delay D q ,ς , i.e ., D ς = D u + D q ,ς . T o satisfy delay constraints, we employ a sho rt f rame structure [3], [4]. The fr ame duration T f equals the transmission time interval (TTI), which is the minima l time gra nularity of the network. Each frame can include data transmission p art with duration T (d) f and con trol signaling part with d uration T (c) f . In this paper, we design th e control signaling as orthog onal p ilots to estimate c hannel state inf ormation (CSI) [3] , [4] . Each uplink transmission takes one frame . T he queuein g delay is bo unded as D q ,ς max ∆ = D ς max − D u . According to [3], [4] , we consider th at the transmitted packet will be discarded if any decoding err or occurs at the recei ver . Moreover, if the q ueueing delay exceeds its bound , the transmitted packet will be discarde d . As a result, the d ecoding er r or pro bability and qu eueing delay violation probab ility should be con sidered in the uOPL probab ility ε ς ψ to e ffecti vely r eflect re liab ility . B. Network A vaila b ility The NA is defined as the pro bability that the QoS requir e - ments, in ter m s of delay and reliability , for e ach UE’ s ser v ice are satisfied [4]. Thus, the N A can be expressed as η , 1 M X M m =1 1 [( D ς ≤ D ς max , ¯ ε ς ≤ ε ς max ) m ] , (4) where ( D ς ≤ D ς max , ¯ ε ς ≤ ε ς max ) m is an event that the delay and reliability requ irements for th e m th UE’ s serv ice are satisfied. Giv en a target N A η max , achieving ( η ≥ η max , η max → 1) indicates th at each UE’ s REC service is ensu red. Howe ver, the N A definition in (4) fails to intuitively reveal the impact of heteroge n eity that stems from diverse delay con straints and UE mobility . Moreover, the NA ev aluation in aerial networks must account for bo th tem poral and spatial d im ensions due to F AP movement [4]. Consequently , th e NA a nalysis in AHetNets becomes highly com p lex. Inspir ed by [13], we consider a worst-case scen a r io to explore the LB o n NA, where all UEs are acti vated and each transmission distance from UEs to F APs is th e farthest, i.e., d = ˜ d . As a result, the N A ev aluation for services with identical Qo S requiremen ts o f UEs with same mobility is simplified because the sp a tial and tempor al dimensions can be o mitted, wh ic h facilitates the N A analysis in A He tNets. This simplification is articulated in Lemma 1. Lemma 1 : The NA for services with identical QoS r e q uir e- ments ( D ς max , ε ς max ) of UEs with same mobility can be lower bound ed by P ψ D ς ≤ D ς max , ε ς ψ ≤ ε ς max of any UE under the condition that d = ˜ d . Pr oof: The LB o n N A is due to th e fact that NA will be degraded as d incre a ses [4] . C. URA-b ased CoMP P ack e t D e live ry Mechanism In the URA scheme, M UEs are partitione d into K proxim ity -based clusters, each con taining at most N = ⌈ M / K ⌉ UEs. Th is strategy is independen t of the delay c o n- straints, UE categories, and mo bility . Th e tota l bandwidth B tot is evenly divided into N or th ogona l subchan nels, wher e each UE occupies one subchannel. The per-subchann el b andwidth obeys B 0 ≤ B = N 0 B 0 ≤ B C [3], [ 4 ], w h ere B 0 is th e orthog onal subcarrier spacin g , 1 ≤ N 0 = ⌊ B tot /( B 0 N ) ⌋ ≤ ⌊ B C / B 0 ⌋ is th e num ber of orthogo nal subcarriers in each subchann el, wh ile B C is the coheren c e bandwid th. Thus, the number of orthog onal subch a nnels is constrain ed by N I = B tot B C ≤ N ≤ N II = B tot B 0 . (5) The UE s within a cluster are inter f erence-fr ee b y availing o f orthog onal subchan n els. Across clusters, UE s sha ring time- frequen cy reso u rces for m a UE gro u p whose mutual interfer- ence is managed by F AP CoMP . There ar e N UE grou ps. W ithin a gro up, UEs ar e referr ed to as schedu led UEs. Due to N = ⌈ M / K ⌉ and the con straint in (5), there are at most K schedu led UEs in eac h gr oup and K is constrained by K I = max 1 , M N II ≤ K ( a ) ≤ min L, M N I = K II , (6) where step ( a ) in (6) is because K ≤ L and reflects the condition for exploiting spatial di versity and multiplexing gains thr o ugh F AP CoMP [4 ]. W e deno te the k th sched uled UE in th e n th group as UE n,k , ∀ n ∈ [1 , N ] and ∀ k ∈ [1 , K ] . Under con straint (6), the bandwid th allocated to each UE is B ( K ) = ⌊ B tot /( B 0 ⌈ M / K ⌉ ) ⌋ B 0 . Based o n the aforementio ned unified bandwid th allocatio n , UEs transmit sign als th at are rec ei ved by all F APs. Then , all F APs fo rward the received sign als to the CP for central- ized signal p r ocessing, which includ es CSI estimation based on the minim um mean-squ are err or estimation method with orthog onal pilots and data detection based on zero -forcing (ZF) detectio n meth o d un der imp erfect CSI [4]. Centralize d signal processing is im p lemented at every time slot with duration T S = T 0 , wh ere T 0 is the g reatest comm on divisor across div erse D ς max and T C ( v r ) . On e T C ( v r ) contains N s = T C ( v r ) / T S time slots and T S comprises N f = T S / T f frames. T o ensure accu rate CSI estimation under service burstiness and diverse d elay constrain ts, all UEs transmit pilots in eac h frame. If no serv ice arrives, the d ata part of th e frame is left empty , while pilot tra nsmission is sustained. Th us, the pilot length ξ for accur ate CSI estimatio n is co nstrained by [5] K ≤ ξ = B ( K ) N f T (c) f ≤ ξ max = B ( K ) N f T f − 1 , (7) where ξ max is the ma x imum pilot len g th; B ( K ) N f T f are the time-frequ ency resou rces f or each service within T S . Based on [4 ], g i,n,l,k , β i,n,l,k , and ψ i,n,l,k denote the channel, the p ath loss, an d the small-scale and sha d owed fading from UE n,k to the l th F AP during time slot i , re- spectiv ely; ρ p ( K, ξ ) = ρ ( K ) ξ is the pilot sequen ce power; ρ ( K ) = ϑp t /( B ( K ) N ) and p t are the tr ansmit signal-to-no ise ratio ( SNR) and transmit power of each UE, r espectively; N is the noise power spectral den sity o f the additive white Gaussian noise; ϑ ∈ (0 , 1) is the SNR loss du e to wireless fro nthaul. Lemma 2 : Under the URA and the worst-case scenario with d = ˜ d , the LB on po st-pr ocessing SNR of UE n,k in F AP CoMP-enab led AHetNets during time slot i can be given by ˆ γ ZF , LB i,n,k ( K, ξ ) = ˆ ρ ( K, ξ ) ˜ β X L − K +1 l =1 | ˆ ψ i,n,l,k | 2 , (8) wher e ˆ ρ ( K, ξ ) = ρ ( K )/( K / ξ + 1) ; ˜ β = β ( ˜ d ) is the path loss un der the worst-case scenario; ˆ ψ i,n,l,k = ψ i,n,l,k − ˆ w i,n,l,k is the estimated small- sca le a nd sha dowed fading η H LB ( U, K , ξ ) = P ψ ˆ γ ZF , LB i,n,k ( K, ξ ) ≥ max γ ς th ( D q ,ς max ) u I , U, K, ξ , ∀ u I ∈ [1 , U I ] × Y U II u II =1 Y N C ( D ς max ,v r ) u II j =1 P ψ n ˆ γ ZF , LB i +( j − 1) N s ,n,k ( K, ξ ) ≥ γ ς th ( D q ,ς max ) u II , U, K, ξ o , ς ∈ { LS , MS } . (11) fr om UE n,k to the l th F AP during time slot i ; ˆ w i,n,l,k ∼ C N (0 , 1 / ( ρ p ( K, ξ ) ˜ β + 1)) den otes the channel estimation er- r or of ψ i,n,l,k under th e worst-case scen ario. Pr oof: By su bstituting β i,n,l,k = β ( ˜ d ) into the LB on po st- processing SNR in [4], (8) can be obtained . I V . N A A N A LY S I S A N D E N H A N C E M E N T A. NA Ana lysis From Section I I I-A, the delay con straints D ς max can be equiv alent to the queuein g d e la y con straints due to D q ,ς max , D ς max − D u . Thus, we consider utilizing effectiv e b andwidth (EB) to analyze the LB on N A, since EB is a principa l tool for represen ting queu e in g delay co nstraints [4]. Specifically , EB is define d as the min im al constant service r ate that is re quired to satisfy ( D q ,ς max , ε q ,ς max ) for a stochastic arriv al process, where ε q ,ς max is th e requ irement of queuein g delay violation prob ability . For stochastic arrival pr ocess a ς ( t ) (in bits/s), the f ormal definition of EB E ς B (in packets/slot) is giv en by [1 4 ] E ς B ( D q ,ς max ) = lim t →∞ T S ς Θ ς t ln E a ς h exp Θ ς Z t 0 a ς ( x ) dx i , (9) where ς , ς ∈ { LS , MS } are the p acket sizes ( in bits) of the REC services und er LSDC and MSDC, r espectiv ely; Θ ς is the QoS exp o nent that satisfies P a ς ( D q ,ς ≥ D q ,ς max ) ≈ e xp ( − Θ ς E ς B D q ,ς max ) = ε q ,ς , (10) where ε q ,ς is the q ueueing delay v iolation probability . If the service r a te R ς is not less than E ς B , then ( D q ,ς max , ε q ,ς max ) can be satisfied [4], [ 14], i.e., ( D q ,ς ≤ D q ,ς max , ε q ,ς ≤ ε q ,ς max ) . Hence, ba sed on EB an d Lemmas 1 ∼ 2, we d eriv e the expression for the LB on N A o f AHetNets in Pr opo sition 1, and analy ze the impact of heterog eneity o n th e LB in Result 1. Especially , the degree o f heterog eneity U is char a c terized by the n umber of delay constra in ts and mo bility com p ositions. Under a comp osition ( D ς max , v r ) , the n umber of coher ence intervals is N C ( D ς max , v r ) = ⌈ D ς max / T C ( v r ) ⌉ . As mentioned in Section III-C, T S is the greatest common d ivisor across div erse D ς max and T C ( v r ) . Thu s, T S and N f are func tio ns o f U , wher e T S ( U ) an d N f ( U ) will reduce as U increases due to m ore diverse delay con straints an d UE mobility . Pr oposition 1: The LB on N A of F AP CoMP-enable d AHetNets with heter ogeneity that stems fr om diverse de lay constraints a n d UE mobility is expr essed in (1 1 ) at the top of the p age. Achieving η H LB ≥ η max , η max → 1 implies that the tar get N A (i.e., η max → 1 ) is achieved. I n (11 ) , ( D q ,ς max ) u I , ∀ u I ∈ [1 , U I ] and ( D q ,ς max ) u II , ∀ u II ∈ [1 , U II ] deno te the queuein g delay constraints when D ς max ≤ T C and D ς max > T C , respectively; ( D ς max , v r ) u II denote th e d e lay constraints and UE mob ility composition s u nder D ς max > T C . Moreo ver , U = U I + U II , where U I and U II ar e the n umbers o f dela y constraints and UE mob ility co mpositions u n der D ς max ≤ T C and D ς max > T C , r espectively . F inally , γ ς th ( D q ,ς max , U, K, ξ ) ar e r equired thres holds of p o st-pr ocessing SNR for satisfying ( D ς max , ε ς max ) , which ar e expr essed as γ LS th P LS = φ exp LS E LS B ( D q , LS max ) ln 2 B ( K ) N f ( U ) T f − ξ , (12) γ MS th P MS = exp MS E MS B ( D q , MS max ) ln 2 B ( K ) N f ( U ) T f − ξ + f Q − 1 ( ε u , c max ) q B ( K ) T (d) f − 1 , (13) wher e φ > 1 is the SNR loss d ue to the fin ite blo cklength [10]; P ς = { D q ,ς max , U, K, ξ } , ς ∈ { L S , MS } ; ε u , c max = ε MS max − ε q , MS max is the r eq uir em e n t o f dec o ding err or pr oba bility . Pr oof: See Appendix A. Result 1: F r om (11) , η H LB decr eases under extended het- er ogeneity , even when the heter ogeneity stems fr om additio n al REC services under LSDC or fr om UEs with lo wer mob ility . The reason is that γ ς th ( P ς ) in (12) and (13 ) in cr ease with extended heter ogeneity , which is d ue to the r edu ction in the time-fr eq uency r esou r ces B ( K ) N f ( U ) T f for e a ch service with incr ea sed U . B. NA Enhancem e nt Based o n the insights in Result 1, it is necessary to imp rove resource efficiency to enhance the LB on N A fo r mitigating th e impact of hetero geneity . T hus, we analytically obtain Pr op erty 1 and form ulate the optimiza tio n pro blem in this par t. Pr operty 1: Sin ce B ( K ) = ⌊ B tot /( B 0 ⌈ M / K ⌉ ) ⌋ B 0 , the time-fr eq uency r esour ces of ea ch service can be inc reased un- der a larg er K . However , ˆ γ ZF , LB i,n,k ( K, ξ ) in ( 8) dec r eases with lar ger K due to increased in terfer ence an d r e duced spatial diversity , de grading η H LB . Moreover , a higher ξ may b e r e- quir ed du e to ξ ≥ K in (7) , which sho rtens the time-fr equency r esou rces for data transmission, i. e., B ( K ) N f ( U ) T f − ξ . Consequently , γ ς th ( P ς ) in ( 12) a nd ( 13) in cr ease, further d e- grading η H LB . Th er efore , K and ξ should b e jo intly op timized to impr ove spatial, fr e quency , and temporal r esour c e ef ficiency . Based o n Pr o perty 1, we fo rmulate the following optim iza- tion pro blem to jointly optim ize K an d ξ . max K,ξ η H LB ( U, K, ξ ) (14) s . t . ( 5 ) , (6) , (7) . The optimal values of K an d ξ , denote d by K ⋆ and ξ ⋆ , respectively , for the problem ( 1 4), can be obtained using the exhaustiv e search m e thod. The complexity o f this method is O (( ξ max + 1) ( K II − K I + 1) − 0 . 5( K II + K I ) ( K II − K I + 1)) . V . S I M U L A T I O N A N D N U M E R I C A L R E S U LT S In th is section, we validate our an alysis an d resu lts by presenting nu merical simulatio ns thr ough 10 10 Monte-Carlo trials. For our simulatio ns, w e consider a disaster area with a radius o f W D = 3, 000 m, where M = 1,00 0 UEs are all T ABLE I S O U R C E S O F H E T E RO G E N E I T Y Sources S 1 S 2 S 3 S 4 D LS max (ms) 55:5:105 55 55:5:105 55:-5:5 v r (m/s) 30 30:-2:10 30:-2:10 30:2:50 T ABLE II S I M U L ATI O N P A R A M E T E R S [ 3 ] , [ 4 ] , [ 1 1 ] Parameter V alue Duration of each frame T f (equals t o TTI) 0.1 ms Orthogonal subcarrier spacing B 0 15 KH z Carrier frequenc y f c 2 GHz Sampling time t s 66.66 µ s Channel coherence bandwidth B C 0.5 MHz Noise po wer spectral density N -174 dBm/Hz T r ansmit po wer ρ t 5 dBm Pack et size LS / MS 1000/160 bits activ ated. The F AP flight altitude is set as h F = 200 m. The A UE flig h t a ltitu de ran ge is set as H = [1 00 , 40 0] m. Th e κ - µ shadowed fading p arameters are set as κ → 0 , µ = 3 , and m → ∞ f or char acterizing the Na k agami- m fading , which is generally u sed in aerial networks [4] . The SNR lo sses d ue to wireless fronth a ul and finite block length are set as ϑ = 0 . 5 an d φ = 1 . 5 , respectively . Th e r equiremen t o f uOPL pro bability is set as ε ς max = 10 − 5 , ς ∈ { LS , M S } , where ε u , c max = ε q , MS max = 1 2 ε MS max and ε q , LS max = ε LS max . I n disaster emergency scenario s, the total delay boun d in uplink RECs under MSDC is D MS max = 0.5 ms, and the relativ e velocity is v r = 30 (m/s) [4]. For uplin k RECs un d er LSDC, ther e are four g roups of total delay bo und D LS max and relative velocity v r , wh ich act as fou r sour c e s of heteroge n eity . The details o f the four sources are shown in T ab le I. The degree o f hetero geneity U = Z , Z ≥ 2 ind icates that the scenario contains RECs un der MSDC and LSDC with ( D LS max (1) , v r (1)) ∼ ( D LS max ( Z − 1) , v r ( Z − 1)) ; U = 1 refers to the scenario tha t co ntains RECs un der M SDC. The target NA is set as η max = 0 . 9 8 . The total ban dwidth is B tot = 150 MHz. W e co nsider the service stochastic arriv a l p rocess as th e Poisson pr ocess, wher e θ ς = σ 2 ς , λ LS = 500 pac kets/s, and λ MS = 2 0 pa ckets/s. The EB (in packets/slot) for a Po isson arriv al process is E ς B = N f T f ln(1/ ε q ,ς max ) D q ,ς max ln[ T f ln(1/ ε q ,ς max )/( θ ς D q ,ς max )+1] [4]. The other p arameters are listed in T able II. Figure 1 shows the impact of d ifferent sources of heter o - geneity on η H LB . Th e results ind icate that as the degree o f heteroge n eity U increases, η H LB experiences sign ificant degra- dation, even when the heterogen eity stems from additional REC services und er LSDC or from UEs with lower mobility . Notably , when heter ogeneity is driven by bo th additiona l REC services un der LSDC a nd UEs with h igher mob ility , as in the source o f S 4 , the degradation in η H LB becomes sup er-linear . These finding s validate Result 1, con firming the pron ounced sensiti vity of η H LB to extended heter ogeneity in AHetNets. Figure 2 shows the impact of heteroge neity—caused by S 4 on η H LB under various resour ce allocation po licie s. These policies inclu de: existing (i) fixed values f o r bo th K an d ξ , (ii) optimization of K only , (iii) optimization of ξ only , and our propo sed (iv) jo in t o ptimization of K and ξ . In the figur e, the legend “Baseline” corresp onds to the p olicy that K = 6 and ξ is fixed, spec ifica lly with T (c) f = 0 . 0 5 ms. The le gend 1 2 4 6 8 10 12 0.5 0.6 0.7 0.8 0.9 1 Fig. 1. LB on NA vs. U with L = 15, K = 6, and T (c) f = 0.05 ms. 1 2 4 6 8 10 12 0.5 0.6 0.7 0.8 0.9 1 Fig. 2. LB on NA vs. U under diffe rent K and ξ w ith L = 15. “Opt. K ” r epresents the p olicy tha t only K is op timized, while ξ re m ains fixed. Similar ly , “Op t. ξ ” re fers to optimizing ξ with K fixed at 6 . The legend “Jo int Opt. K and ξ ” indicates the policy th a t b o th K and ξ a r e jointly o ptimized. Besides, “Max U ” is the max im um U , where η H LB ≥ η max , η max → 1 can be ach iev ed. Compared to existing p olicies, th e joint optimization of K and ξ sign ificantly enhan ces the ab ility to achieve η H LB ≥ η max , η max → 1 in AHetNets, especially under incr eased heter o geneity . This dem o nstrates that th e propo sed joint optimization p olicy effectiv ely m itigates NA degradation cau sed by extended heter ogeneity , thereby vali- dating th e effecti vene ss o f Pr op e rty 1 and th e op timization problem in (14 ) for achieving the target N A in AHetNets. V I . C O N C L U S I O N W e in vestigated the N A of F AP CoMP-ena bled AHe tNe ts for delay-c o nstrained REC services to UEs with varying mobility . T o addr e ss resource allocation conflicts fro m he t- erogen e ity in delay constraints and mobility , we employed a URA sch eme. W e d eriv ed expressions for the LB o n NA, revealing that exten d ed h eterogen eity significantly degrades it. T o mitigate this, we join tly op timized the numbe r of UEs sharing time-freq uency resour ces ( K ) and the p ilot leng th ( ξ ), improving th e LB. Simulations confirm ed that target NA levels are achiev ab le even un der g reater he te r ogeneity throu gh joint optimization of K and ξ . A P P E N D I X A P R O O F O F P RO P O S I T I O N 1 Under diverse D ς max and T C , it is likely to ob serve D ς max ≤ T C and D ς max > T C , ς ∈ { LS , MS } , which result in quasi-static and time-varying chan n els, respectively [4], [11] . 1) NA when D LS max > T C : For dela y -sensitiv e services, e ven if the delay con stra in ts are less stringen t, th e block length of channel codin g is finite [10 ] . Th e n, with a specific SNR γ , the achiev ab le ser vice rate (packets/slot) under LSDC is [ 10] R LS = B N f T (d) f LS ln 2 C γ φ , (15) where C ( γ ) = ln (1 + γ ) is Shannon ’ s ca pacity in the infin ite blockleng th regime; B T (d) f is the blocklen gth of channel coding du ring each f rame (in the number of chan n el uses); B N f T (d) f = B N f T f − ξ is the time-f requency resources for data transmission of each service during each time slot. From [10] , packet loss com es from q ueueing delay viola- tions f or the services u nder LSDC. Then, th e QoS req u ire- ment ( D LS max , ε LS max ) for en suring REC ser vices und e r LSDC can be equated to ( D q , LS max , ε q , LS max ) . In time-varying ch a n nels, ˆ γ ZF , LB i,n,k = ˆ γ ZF , LB i ′ ,n,k , ∀ i, i ′ ∈ [0 , I ] , | i − i ′ | ≤ N s and ˆ γ ZF , LB i,n,k = ˆ γ ZF , LB i + N s ,n,k ∪ ˆ γ ZF , LB i,n,k 6 =ˆ γ ZF , LB i + N s ,n,k . Consequen tly , R LS varies across different T C within D LS max and r e mains constant dur ing each T C . Then , ( D q , LS max , ε q , LS max ) can be satisfied if R LS ≥ E LS B can be assured durin g each T C within D LS max . Thus, by substituting R LS = E LS B into (15), we get the req uired threshold of post- processing SNR γ LS th for satisfying ( D LS max , ε LS max ) , which is giv en in (12). Based o n Lemma 1, th e LB on N A for REC services under LSDC with identical ( D LS max , ε LS max ) of UE s with same m obility when D LS max > T C can be given b y ˆ η LS LB = Y N C j =1 P ψ ˆ γ ZF , LB i +( j − 1) N s ,n,k ≥ γ LS th . (16) 2) NA when D MS max ≤ T C : When the d elay co nstraints are more stringen t, the block length of channel codin g is significantly sh orter [10]. As a result, d ecoding er rors cannot be ignor ed under MSDC. Acco rding to finite blocklength in- formation theory , the ach ievable service r ate R MS (packets/slot) of UE with a specific SNR γ and a given decoding error probab ility ε u , c can be given b y [ 10] R MS = B N f T f − ξ MS ln 2 " C ( γ ) − s V ( γ ) B T (d) f f Q − 1 ( ε u , c ) # , (17) where V ( γ ) = 1 − 1 (1+ γ ) 2 ≤ 1 is the channel disper sion. From [4] , [10], packet loss com es from d ecoding erro rs and queueing delay violations for services under MSDC. According to [4], by in tegrating th e decodin g error pro bability ε u , c and the q ueueing d e lay v io lation probability ε q , MS , the uOPL pro bability is gi ven by ε MS ψ ≤ ε u , c + ε q , MS . For QoS requirem ents ( D MS max , ε MS max ) , ε MS max can b e d ivided into ε u , c max and ε q , MS max under the delay con stra in ts D MS max , i.e., ε MS max = ε u , c max + ε q , MS max , where ε u , c max is the requiremen t of ε u , c . In quasi-static channels, R MS is co nstant within D MS max [4]. By substituting R MS = E MS B , ε u , c = ε u , c max , a n d V ( γ ) = 1 into (17), we ca n ob tain the requ ired thr eshold o f post-pr ocessing SNR γ MS th for satisfying ( D MS max , ε MS max ) , which is giv en in (1 3). Based o n Lemma 1, the LB o n N A for REC services under MSDC with identical ( D MS max , ε MS max ) of UEs with same mobility when D MS max ≤ T C can be expressed as ˜ η MS LB = P ψ ˆ γ ZF , LB i,n,k ≥ γ MS th . (18) 3) NA when D LS max ≤ T C : Based on (12) and (1 8), the LB on NA for REC serv ices unde r L SDC with identical ( D LS max , ε LS max ) of UEs with sam e mobility , when D LS max ≤ T C , can be given b y ˜ η LS LB = P ψ ˆ γ ZF , LB i,n,k ≥ γ LS th . (19) 4) NA un d er D MS max > T C : Based on (13) and (16), the LB o n N A for REC services under MSDC with iden tical ( D MS max , ε MS max ) of UEs with sam e mobility , when D MS max > T C , can be given b y ˆ η MS LB = Y N C j =1 P ψ ˆ γ ZF , LB i +( j − 1) N s ,n,k ≥ γ MS th . (20) Since ˜ η ς LB , ς ∈ { LS , MS } , in (1 8) and (19 ) depe n d on ly on γ ς th , ensuring the REC with a hig h er γ ς th automatically ensures the REC with a lower γ ς th . Ensu ring REC wh en D ς max > T C is indep endent of th e case when D ς max ≤ T C , since ˆ η ς LB in (16) and ( 20) depend s on both γ ς th and N C . Moreover, when D ς max > T C , REC under different de lay co nstraints shows weak coup ling acr oss UE s with varying mob ility . Sp ecifically , ensuring REC with larger γ ς th or N C does no t guarantee it for smaller values, ev en though ˆ η ς LB increases as γ ς th or N C decreases. This is becau se a smaller N C , due to stringent D ς max , is accompanied by a larger γ ς th . Fin a lly , b y c ombining N As a cross delay constrain ts and m obility levels, we d erive a LB o n overall N A valid for both D ς max ≤ T C and D ς max > T C . Based on this, (11) follows, comp leting the pro of. R E F E R E N C E S [1] N.-N. Dao et al. , “Surve y on aerial radio access network s: T oward a comprehen si ve 6G access infrastru cture, ” IEEE Commun. Surve ys T uts. , vol. 23, no. 2, pp. 1193–1225, 2nd Quarter 2021. [2] Z. Y ao, W . Cheng, W . Zhang, T . Zhang, and H. Zhang, “The rise of U A V fleet technologi es for emerge ncy wireless communication s in harsh en vironments, ” IEEE Netw . , vol. 36, no. 4, pp. 28–37, Jul. 2022. [3] Z. Liu, K. Li, Y . W ang, and P . Zhu, “Mix ed traffic sched uling with laten cy and jitter anal ysis in URLLC industri al automati on, ” IEEE Internet Things J. , vol. 12, no. 12, pp. 18 820–18 835, Jun. 2025. [4] J. Liu et al. , “T ow ards reliable communicatio ns with delay requirement in aerial disaste r emergen cy networks via coordinat ed multi-point , ” IEEE T rans. Commun. , vol. 73, no. 10, pp. 8781–8796, Oct. 2025. [5] M. Mohammadi, Z. Mobini, H. Q. Ngo, and M. Matthaiou, “Next- generat ion multiple access with cell-free massiv e MIMO, ” Pr oc. IEE E , vol. 112, no. 9, pp. 1372–1420, Sept. 2024. [6] M. Elwek eil et al. , “Power contro l in cell-f ree m assi ve MIMO network s for U A Vs URLLC under the finite blocklength re gime, ” IEEE Tr ans. Commun. , vol. 71, no. 2, pp. 1126–1140, Feb 2023. [7] L. Liu, S. W u, and Y . Ma, “Resource allocation in cell- free massi ve MIMO with the coexiste nce of eMBB and URLLC, ” IEEE Tr ans. V eh. T ec hnol. , vol. 74, no. 10, pp. 16 039–16 054, Oct. 2025. [8] X. Zhang et al. , “Multi-a gent deep reinforc ement learning-base d uplink po wer control in cel l-free massiv e MIMO with mobile users, ” IEEE T rans. V eh. T echno l. , pp. 1–16, 2025 (Early Access). [9] M. S. Abbas, Z. Mobini, H. Q. Ngo, H. Shin, and M. Matthaio u, “Joint AP sele ction and po wer allocat ion for unicast-multi cast cell-free massiv e MIMO, ” IEEE Internet Things J . , vol. 12, no. 22, pp. 47 135–47 150, Nov . 2025. [10] R. Dong et al. , “Deep learning for radio resource allocation with di verse qualit y-of-servic e requirements in 5G, ” IEEE T rans. W ir eless Commun. , vol. 20, no. 4, pp. 2309–2324, Apr . 2021. [11] S. Elhoushy and W . Hamouda, “Limiting Doppler shift ef fect on cell- free massiv e MIMO systems: A stocha stic geometry approach, ” IEEE T rans. W ir eless Commun. , vol. 20, no. 9, pp. 5656–5671, Sept. 2021. [12] Service Requireme nts for the 5G System , T echnical Specificati on (TS) 22.261, 3rd Generation Partnership P roject, Jun. 2022. [13] M. A. Imran et al. , “Exploring the boundarie s of connecte d systems: Communicat ions for hard-to-rea ch areas and extreme conditi ons, ” Proc. IEEE , vol. 112, no. 7, pp. 912–945, Jul. 2024. [14] C. She et al. , “ A tutorial on ultrareliab le and low-l atenc y communica- tions in 6G: Integra ting domain knowl edge into deep learning, ” Pr oc. IEEE , vol. 109, no. 3, pp. 204–246, Mar . 2021.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment