Stability of Open Multi-agent Systems over Dynamic Signed Digraphs
We address the synchronization problem in open multi-agent systems (OMAS) containing both cooperative and antagonistic interactions. In these systems, agents can join or leave the network over time, and the interaction structure may evolve accordingl…
Authors: Pelin Sekercioglu, Angela Fontan, Dimos V. Dimarogonas
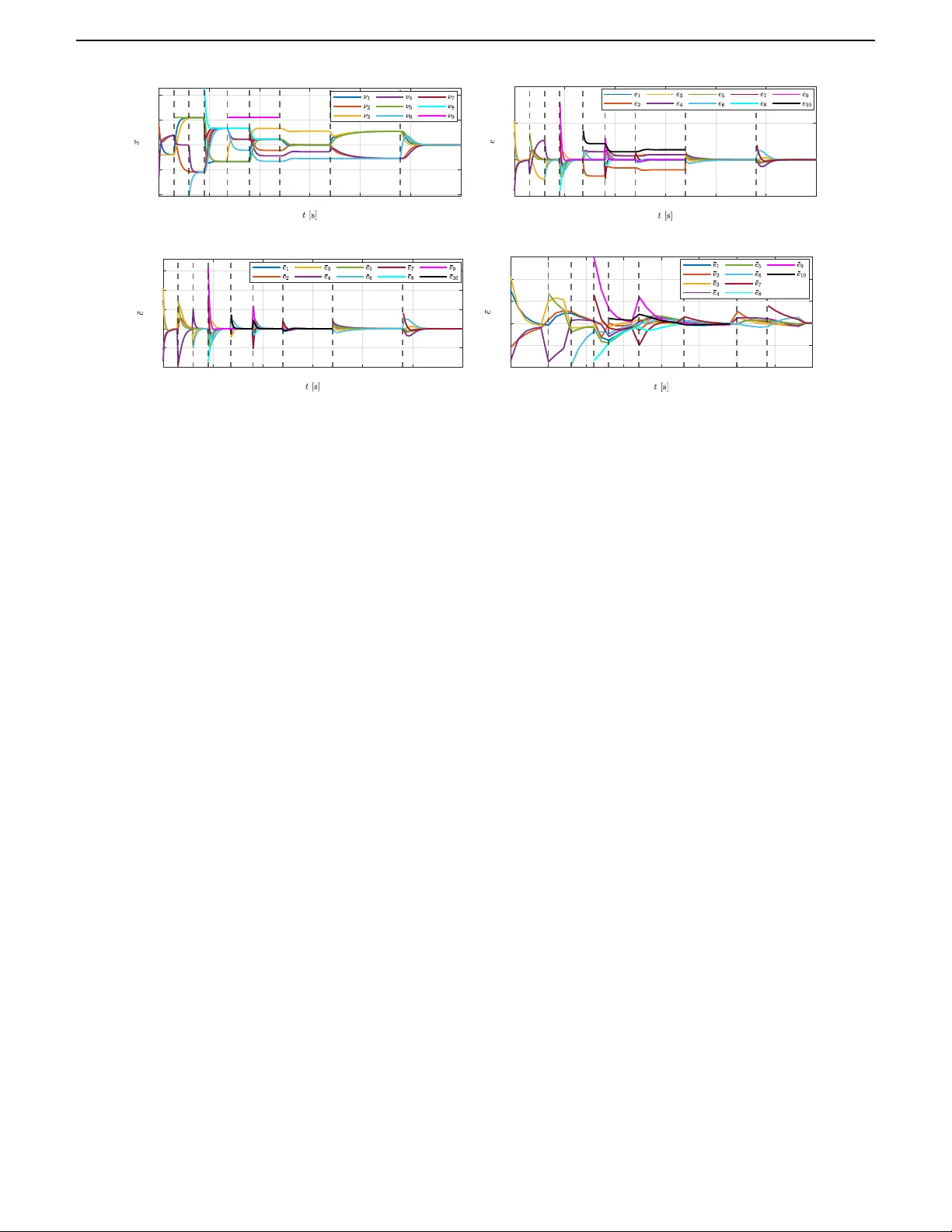
1 Stability of Open Multi-agent Systems o v er Dynamic Signed Digr aphs P elin Sekercioglu, Angela Fontan, Dimos V . Dimarogonas Abstract — W e address the sync hronization pr oblem in open multi-a gent systems (OMAS) containing both coop- erative and antagonistic interactions. In these systems, agents can join or leave the network over time, and the interaction structure may ev olve accordingly . T o capture these dynamical structural changes, we represent the net- work as a switc hed system interconnected over a dynamic and directed signed graph. Additionally , the network may contain one or multiple leader gr oups that influence the behavior of the remaining agents. In g eneral, we show that the OMAS exhibit a more g eneral form of synchronization, including trivial consensus, bipartite consensus and con- tainment. Our approac h uses the signed edge-based agree- ment protocol, and constructs strict L yapuno v functions for signed networks described by signed edge-Laplacian matrices containing multiple zero eig en values. Numerical simulations v alidate our theoretical results. Index T erms — Open multi-agent systems, signed net- works, signed edge-based agreement protocol, switched systems. I . I N T R O D U C T I O N O PEN multi-agent systems (OMAS) are dynamic net- works in which agents and edges can be added and re- mov ed over time. These systems naturally arise in applications such as social networks, where the size and structure of the graph e volv e due to arriv als and departures of the participants [1], [2]. In such settings, relationships may also change as individuals’ interactions ev olve through the formation of new friendships, the dissolution of old ones, or shifts in trust or like/dislike ov er time. OMAS also appear in sensor-based robotic systems, where the topology is adapted based on inter- agent distances to maintain global connectivity of the graph and ensure collision avoidance among nearby agents [3], [4]. Early work on OMAS includes [1], which studies the consensus problem via a discrete-time gossip algorithm with deterministic agent arriv als and departures. This was later extended to random arriv als in [2]. Similarly , [5] addresses the max-consensus problem using discrete-time gossip-based interactions. Later , in [6], [7], new stability definitions for This work was suppor ted in par t by the Wallenberg AI, Autonomous Systems and Software Program (WASP) funded by the Knut and Alice W allenberg (KA W) Foundation, the Hor izon Europe EIC project SymA ware (101070802), the ERC LEAFHOUND Project, the Swedish Research Council (VR), and Digital Futures. P . Sek ercioglu, A. Fontan, and D . V . Dimarogonas are with the Division of Decision and Control Systems, KTH Royal In- stitute of T echnology , SE-100 44 Stoc kholm, Sweden (e-mail: { pelinse,angf on,dimos } @kth.se). OMAS are introduced. Other works on OMAS in social networks and distributed computation include [8]–[10]. In [11], a nov el stability framework was proposed to address the consensus problem in OMAS with nonlinear dynamics. The key idea is to model the OMAS as a switched system, where the system switches modes whene ver at least one node or edge is added or removed. Under an av erage dwell time condition, the frame work guarantees the (practical) stability of the ov erall system. Follo wing the work of [11], [3] tackled the problem of formation control for OMAS modeled by first-order systems ov er undirected graphs and under inter-agent constraints. In all previous references, it is assumed that all agents cooperate with each other . Howe ver , in many real-world sce- narios, agents may exhibit antagonistic beha viors. Examples include robotic applications such as herding control [12] and social networks where agents compete [13]–[15] and may spread disinformation [16], to name just a few . This work is motiv ated by such real-world scenarios, particularly addressing (i) changes in the nature of interactions and (ii) the presence of multiple influential entities, referred to as leaders. A well- established approach to modeling cooperativ e and antagonistic interactions in dynamical systems is through the use of signed graphs [13], [17]. In this framework, cooperativ e interactions are represented by positiv e edge weights, while antagonistic interactions are modeled with negati ve weights. In this paper , we study the synchronization of signed OMAS interconnected over directed signed graphs. W e consider sys- tems where new nodes and edges can be added or removed, the nature of the interconnections can change signs, and the direction of information exchange may shift, leading to role changes among agents. Our main contribution is a novel stability approach for signed OMAS interconnected over dy- namic directed signed graphs, potentially with multiple leader nodes, by extending the L yapunov equation-based analysis to signed edge Laplacians with multiple zero eigen v alues, enabling the construction of strict L yapunov functions. T o the best of our knowledge, this is the first attempt to address OMAS ov er directed and signed graphs. As in [11], we model the signed OMAS using a switched system representation. A first work in this direction is [18], where we addressed the problem of bipartite consensus ov er OMAS, but only considering undirected signed graphs. In this paper , we address a more general case scenario, where we consider directed signed graphs, and the presence of leaders. From a technical perspective, our main results build on [16] and the framework introduced in [19], where the dynamical 2 system is decomposed into two interconnected subsystems: the dynamics of the weighted a verage system and the synchro- nization errors relativ e to that av erage. W e extend the latter component to directed signed graphs, described in terms of the edges of the graph. Specifically , we reformulate the synchro- nization problem as a stability problem for synchronization errors, defined as the difference between the edge states and the weighted edge a verage. Our analysis is conducted in signed edge-based coordinates. Then, building on [20], which provides a L yapunov characterization for Laplacians with a single zero eigenv alue, we extend this result to Laplacians with multiple zero eigen values. Unlike [16], we specifically consider signed edge Laplacians. Our contributions include the construction of strict L yapunov functions and the analysis of dynamic signed digraphs, where node additions/remov als, cooperation–antagonism switches, and leader–follower role shifts directly impact the system’ s con vergence behavior , set- ting our work apart from the aforementioned references. I I . P RE L I M I N A R I E S Notation: |·| denotes the absolute value for scalars, the Euclidean norm for v ectors, and the spectral norm for matrices. R is the set of real numbers and R ≥ 0 is the nonnegati ve orthant. A > 0 ( A ≥ 0 ) indicates that A is a positiv e definite (positiv e semidefinite) matrix. A. Signed digraphs Let G s = ( V , E ) be a signed digraph, where V = { ν 1 , ν 2 , . . . , ν N } is the set of N nodes and E ⊆ V × V is the set of edges. The edge ε k = ( ν j , ν i ) ∈ E of a digraph denotes that the agent ν i , which is the terminal node (tail of the edge), can obtain information from the agent ν j , which is the initial node (head of the edge). The adjacency matrix of G s is A := [ a ij ] ∈ R N × N , where a ij = 0 if and only if ( ν j , ν i ) ∈ E . a ij > 0 if and only if the edge ( ν j , ν i ) has a positiv e sign, indicating a cooperativ e relationship, and a ij < 0 if and only if the edge ( ν j , ν i ) has a negati ve sign, indicating an antagonistic relationship. In this work, we only consider unweighted digraphs, such that a ij = { 0 , 1 , − 1 } , without any self-loops. A signed digraph is said to be digon sign-symmetric if a ij a j i ≥ 0 . It means that, if ( ν i , ν j ) and ( ν j , ν i ) both exist, the interaction between two interconnected agents always has the same sign in both directions. Then, we make the following assumption: Assumption 1: The signed digraph is unweighted and digon sign-symmetric. A directed path is a sequence of distinct adjacent nodes in a digraph. When the nodes of the path are distinct except for its end vertices, the directed path is called a directed cycle. A directed spanning tree is a directed tree subgraph that includes all the nodes of the digraph. In this structure, ev ery agent (node) has a parent node, except for the r oot node , which has no incoming edges and is connected to ev ery other node via directed paths. A tree contains no cycles. A digraph is said to be strongly connected if there exists a directed path between ev ery pair of nodes. A directed graph is weakly connected if SB-rooted SCC SUB-rooted SCC root node ν 1 ν 2 ν 3 ν 4 ν 9 ν 5 ν 6 ν 7 ν 8 Fig. 1 : A signed digon sign-symmetric digraph containing 3 leader groups, where the black edges represent cooperati ve interactions and the dashed red edges represent antagonistic interactions. The first leader group is a SB-rooted SCC con- taining the leader nodes ν 1 , ν 2 , ν 3 , and ν 4 , the second leader group is a SUB-rooted SCC containing the leader nodes ν 5 , ν 6 , and ν 7 , and the third leader group is a root (leader) node, ν 8 . The node ν 9 is the follower node. replacing all its directed edges with undirected edges results in a connected undirected graph. In this work, we consider signed digraphs that may contain multiple leader nodes. A leader node is defined as either a root node or a node that is part of a r ooted str ongly-connected com- ponent (r ooted SCC) . A rooted SCC is a strongly connected subgraph without incoming edges. A leader gr oup is either a single root node (representing a single-node leader group) or an entire rooted SCC (representing multiple leader nodes interconnected in a strongly connected subgraph). If the graph contains at least one leader group, the remaining nodes are referred to as followers— See Figure 1. A signed graph is said to be structurally balanced (SB) if it can be split into two disjoint sets of v ertices V 1 and V 2 , where V 1 ∪ V 2 = V , V 1 ∩ V 2 = ∅ such that for every ν i , ν j ∈ V p , p ∈ { 1 , 2 } , if a ij ≥ 0 , while for ev ery ν i ∈ V p , ν j ∈ V q , with p, q ∈ { 1 , 2 } , p = q , if a ij ≤ 0 1 . It is structurally unbalanced (SUB), otherwise [13]. The signed Laplacian matrix L s = [ ℓ s ij ] ∈ R N × N associated with G s is defined as ℓ s ij := P k ≤ N | a ik | , if i = j ; and ℓ s ij := − a ij , if i = j [13], [17]. W e now recall the definitions of the signed incidence matrices of a signed digraph [21], [22]. Consider a signed graph G s containing N nodes and M edges. The signed incidence matrix E s ∈ R N × M of G s is defined as [ E s ] ik := +1 , if ε k = ( ν i , ν j ) or if ν i , ν j are competitiv e and ε k = ( ν j , ν i ; [ E s ] ik := − 1 , if ν i , ν j are cooperativ e and ε k = ( ν j , ν i ) ; [ E s ] ik := 0 , otherwise. The signed in-incidence matrix E s ⊙ ∈ R N × M of G s is defined as [ E s ⊙ ] ik := − 1 , if ν i , ν j are cooperativ e and ε k = ( ν j , ν i ) ; [ E s ⊙ ] ik := +1 , if ν i , ν j are competiti ve and ε k = ( ν j , ν i ) ; [ E s ⊙ ] ik := 0 , otherwise. Here, ε k is the oriented edge interconnecting nodes ν i and ν j , k ≤ M , i, j ≤ N . The signed Laplacian L s ∈ R N × N and the signed edge Laplacian L e s ∈ R M × M of a signed digraph are given as L s = E s ⊙ E ⊤ s , L e s = E ⊤ s E s ⊙ . The signed Laplacian of a signed digraph is not symmetric, and its eigenv alues all hav e nonnegati ve real parts. 1 Agents in different subsets need not be directly connected: agents belong- ing to the same subset are cooperative, while agents in different subsets are antagonistic, as determined by the signs of paths connecting them. SEKERCIOGLU et al. : ST ABILITY OF OPEN MUL TI-AGENT SYSTEMS O VER D YNAMIC SIGNED DIGRAPHS 3 B. Stability of cooperative OMAS Before delving into the details, we first recall the follo wing crucial definitions and theorem from [11] for cooperativ e OMAS, which serve as the basis for our analysis of the stability of the system. Let σ : R ≥ 0 → P be the switching signal associated with topology changes, where P := { 1 , 2 , . . . , s } represents the set of s possible switching modes. Each mode of the system is denoted by ϕ ∈ P , with ϕ = σ ( τ ) for τ ∈ [ t l , t l +1 ) , where t l and t l +1 are consecuti ve switching instants. A switching instant t l is defined as the time at which a ne w edge is created or being removed between agents, a new agent enters or leaves the system, or the sign/direction of an interconnection changes. Consider the following switched system modeled by ˙ x σ ( t ) ( t ) = f σ ( t ) ( x σ ( t ) ( t )) , (1) where x σ ( t ) ∈ R N σ ( t ) is the state. N σ ( t ) indicates that the system’ s dimension may change with each switch, with N ϕ < + ∞ . For this system, we hav e the following. Definition 1: The system (1) is said to be globally uni- formly practically stable, if there exist a class KL function β and a scalar ϵ ≥ 0 such that for any initial state x σ ( t 0 ) ( t 0 ) and admissible ϕ , ∥ x σ ( t ) ( t ) ∥ ≤ β ( ∥ x σ ( t 0 ) ( t 0 ) ∥ , t − t 0 )+ ϵ, ∀ t ≥ t 0 , where ϵ is called the ultimate bound of x σ ( t ) ( t ) as t → + ∞ . Next, we introduce the concept of transition-dependent average dwell time for the switching signal σ ( t ) , which ensures that the switching signal meets the required conditions for stability— See Theorem 1 below and Theorem 5 in Section V. Definition 2: ( [11, Definition 2]) On a given interval [ t 0 , t f ) , with t f > t 0 ≥ 0 , consider any two consecuti ve modes ˆ ϕ, ϕ ∈ P , where ˆ ϕ precedes ϕ . Let N ϕ, ˆ ϕ ( t 0 , t f ) denote the total number of switchings from mode ˆ ϕ to mode ϕ within [ t 0 , t f ) , and let T ϕ ( t 0 , t f ) denote the total acti ve duration of mode ϕ within [ t 0 , t f ) . The constant τ ϕ, ˆ ϕ > 0 satisfying N ϕ, ˆ ϕ ( t 0 , t f ) ≤ ˆ N ϕ, ˆ ϕ + T ϕ ( t 0 ,t f ) τ ϕ, ˆ ϕ , for some given scalar ˆ N ϕ, ˆ ϕ ≥ 0 , is called the slow transition-dependent av erage dwell time of the switching signal σ ( t ) . Theor em 1: ( [11]) Consider the system (1) with the switch- ing signal σ ( t ) on [ t 0 , t f ] , 0 ≤ t 0 < t f < + ∞ . Assume that, for any two consecutiv e modes ϕ , ˆ ϕ ∈ P , where ˆ ϕ precedes ϕ , there exist class K ∞ functions κ , κ , constants γ ϕ , Ω ϕ, ˆ ϕ > 0 , Θ ≥ 0 , and a non-negati ve function V ϕ ( t, x ϕ ( t )) : R ≥ 0 × R N ϕ → R ≥ 0 , such that ∀ t ∈ [ t 0 , t f ] , κ ( | x ϕ | ) ≤ V ϕ ( t, x ϕ ( t )) ≤ κ ( | x ϕ | ) ˙ V ϕ ( t, x ϕ ( t )) ≤ − γ ϕ V ϕ ( t, x ϕ ( t )) V ϕ ( t + k , x ϕ ( t + k )) ≤ Ω ϕ, ˆ ϕ V ˆ ϕ ( t − k , x ˆ ϕ ( t − k )) + Θ , where γ ϕ > 0 and Ω ϕ, ˆ ϕ > 1 . Moreover , asssume that σ ( t ) satisfies τ ϕ, ˆ ϕ ≥ ln(Ω ϕ, ˆ ϕ ) γ ϕ , for any ˆ ϕ ∈ P where τ ϕ, ˆ ϕ is defined in Definition 2. Then, (1) is globally uniformly practically stable. I I I . M O D E L A ND P RO B L E M F O R M U L ATI O N W e consider a network of agents interconnected ov er a signed digraph with cooperative and antagonistic interactions. The considered digraph is dynamic, meaning that agents can join or lea ve, edges may be added or deleted, and the sign or direction of the interactions can change ov er time. These changes in the MAS can be modeled using a switched system representation as in Section II-B. For an illustration of dif ferent modes in a signed OMAS, see Figure 2. At each mode ϕ ∈ P , consider the MAS composed of N ϕ dynamical systems modeled by ˙ x i = u i , i ∈ { 1 , 2 , . . . , N ϕ } , (2) where x i ∈ R is the state of the i th agent, and u i ∈ R is the control input. For notational simplicity and without loss of generality , we assume that x i ∈ R , but all contents of this paper apply to systems of higher dimension x i ∈ R n , n ≥ 1 , using a Kronecker product. The agents interact on a dynamic signed digraph G s ϕ that contains N ϕ nodes and M ϕ edges. The system (2) is interconnected with the control law u i = − k 1 N ϕ X j =1 | a ϕ ij | x i − sign ( a ϕ ij ) x j , (3) where k 1 > 0 , and A ϕ = [ a ϕ ij ] is the adjacency matrix at mode ϕ ∈ P , with a ϕ ij ∈ { 0 , ± 1 } representing the adjacency weight between nodes ν j and ν i . It is well kno wn that under the distributed control law (3), agents interconnected ov er a SB signed digraph achieve bipartite consensus if and only if the signed graph contains a directed spanning tree, while those ov er a SUB digraph reach trivial consensus provided that the graph contains a directed spanning tree and has no root node [13], [23]. Thus, we pose the follo wing assumption on the connectivity of the initial signed graph. Assumption 2: The initial signed digraph contains a di- rected spanning tree. W e consider a dynamic signed digraph with node additions and remov als to model systems where agents progressi vely join or leave the system ov er time. Graph connectivity is crucial for sustaining the desired collective beha vior of the network: for this reason, in our formulation, we assume that at each mode the signed digraph is weakly connected, which can be ensured by allowing only ne wly added agents to be remov ed 2 . W e are interested in guaranteeing the stability of the OMAS under all and possibly infinite switching modes P . The possi- ble achiev able control objectives for the system (2) intercon- nected with the control law (3) over a signed digraph depend on the structural balance property and the graph topology . In particular , the presence of rooted SCCs and root nodes plays a crucial role in determining the agents’ con ver gence behavior . T o formulate the achiev able control objectiv e for the OMAS, it is important to address all achiev able control objectiv es for each mode. On the one hand, a rooted SCC influences the con ver gence of the rest of the network, depending on whether it is SB or SUB. If the digraph contains a single root node, the 2 Our results can be extended to include disconnected signed digraphs for each mode. Howe ver , this would imply an extension of the deriv ations provided in Section IV. Therefore, we omit this extension for lack of space and to preserve the discussion on synchronization. 4 system exhibits a leader-following bipartite consensus, where all agents conv erge either to the leader’ s state or its opposite state if the digraph is SB. In such cases, the root node or the rooted SCC acts as a leader gr oup , influencing the remaining agents, referred to as followers . More formally , we define a leader group as either a single root node or a rooted SCC consisting of multiple nodes. On the other hand, if the digraph contains multiple root nodes or rooted SCCs, each of these leader groups dictates the behavior of the remaining agents. Instead of con verging to a single or bipartite equilibrium, the agents settle within a region defined by the states of the leader groups. In this particular case, the digraph no longer contains a directed spanning tree, as independent leader groups are not mutually reachable. Therefore, for signed digraphs with multiple leaders groups, we pose the following connectivity assumption. Assumption 3: The signed digraph contains m leader groups, where l 1 is the number of root nodes, l 2 S B is the number of SB-rooted SCCs, and l 2 S U B is the number of SUB- rooted SCCs with m = l 1 + l 2 > 1 and l 2 = l 2 S B + l 2 S U B ; |L| = k < N and F are the sets containing the indices corresponding to the nodes in the leader groups and followers respectiv ely . 1) The k leader nodes are org anized into m leader groups of p i nodes, each forming a strongly connected subgraph (or p i = 1 if it is a single root node), where 1 < m ≤ k , i ≤ m , and P m i =1 p i = k . 2) There exists at least one path from ν i to ν j for all j ∈ F and i ∈ L . The achiev able control objectiv e for (2) in closed loop with the distributed control law (3) and interconnected over a SB digraph: • containing a directed spanning tree (Assumption 2) is to ensure agents achieve bipartite consensus , where agents con ver ge to the same value in modulus but not in sign, that is, lim t →∞ x i ( t ) − sign ( a ϕ ij ) x j ( t ) = 0 , ∀ i, j ≤ N ϕ . • containing m leader groups, under Assumption 3, is to ensure agents achiev e bipartite containment , that is, lim t →∞ | x j ( t ) | − max i ∈L | x i ( t ) | ≤ 0 , for each j ∈ F . The achiev able control objectiv e for (2) in closed loop with the distributed control law (3) interconnected over a SUB digraph: • containing a directed spanning tree (Assumption 2) and a SUB-rooted SCC, without a root (leader) node, is to ensure agents achieve trivial consensus , where all agents con ver ge to zero, that is, lim t →∞ x i ( t ) = 0 , ∀ i ≤ N ϕ . • containing a directed spanning tree (Assumption 2) and SB-rooted SCC or a root node, is to ensure agents achie ve interval bipartite consensus , that is, lim t →∞ x i ( t ) = x ∗ ∈ [ − θ , θ ] , ∀ i ≤ N ϕ , where θ > 0 . • containing m leader groups, under Assumption 3, is to ensure agents achiev e bipartite containment , that is, lim t →∞ | x j ( t ) | − max i ∈L | x i ( t ) | ≤ 0 , j ∈ F . In this article, we show that, under Assumptions 1 and 2, the signed OMAS is uniformly practically stable. In the case agents achieve trivial consensus or bipartite consensus, their edges states, defined as e ϕ k = x i − sign ( a ϕ ij ) x j , ε k = ( ν j , ν i ) ∈ E ϕ (4) where k ≤ M ϕ denotes the index of the interconnection between the j th and i th agents, conv erge to zero —See [18]. Howe v er , as the networks considered here, in addition to signs on the edges, contain a priori, rooted SCCs or multiple root nodes, the resulting Laplacians can also have multiple zero eigen v alues in some cases. This also results, in general, in multiple conv ergence points for agents and their edge states, which means that edge states do not always con ver ge to zero. Rather than handling multiple control objectives individually , we express them through a single equiv alent objectiv e. Then, following the frame work laid in [19] and e xtending it to signed networks with associated Laplacians containing multiple zero eigen v alues and to the signed edge-based formulation, we define the weighted average system for the edge states. Let ξ ϕ be the number of zero eigen values of L e s ϕ in mode ϕ ∈ P . Then, we define the weighted edge average state as e m ϕ := ξ ϕ X i =1 v r ϕ i v ⊤ l ϕ i e ϕ , (5) where v r ϕ i and v l ϕ i are the right and left eigen vectors as- sociated with the zero eigen v alues of the edge Laplacian, e ϕ := [ e ϕ 1 e ϕ 2 · · · e ϕ M ϕ ] ⊤ , and e ϕ k is defined in (4). W e define the synchronization errors as ¯ e ϕ = e ϕ − e m ϕ = [ I − ξ ϕ X i =1 v r ϕ i v ⊤ l ϕ i ] e ϕ , (6) where ¯ e ϕ := [ ¯ e 1 ¯ e 2 . . . ¯ e M ϕ ] ⊤ . Then, the control objective is equiv alent to making the synchronization errors conv erge to zero, that is, lim t →∞ ¯ e ϕ k ( t ) = 0 , ∀ k ≤ M ϕ . (7) Remark 1: In the case where the nullspaces of L ⊤ e s and E s are equal to each other, e m ϕ = 0 and the synchronization errors are equal to the edge states. I V . L Y A P U N OV E Q UA T I O N F O R D I R E C T E D S I G N E D E D G E L A P L AC I A N S T o establish synchronization of OMAS ov er signed di- graphs, we prov e the asymptotic practical stability of the set { ¯ e ϕ = 0 } . In particular, we show how to construct strict L yapuno v functions, in the space of ¯ e ϕ , referring to functions expressed in terms of ¯ e ϕ , based on the following statements, which are original contributions of this paper and extend [20, Proposition 1] to the case of directed and signed Laplacians containing multiple zero eigen values and [16, Proposition 1] to the case of signed edge Laplacians corresponding to directed graphs with multiple zero eigen values (Theorems 3 and 4). For a directed spanning tree graph, we have the following. Theor em 2: Let G s be a signed digraph containing N agents interconnected by M edges, and let L e s be the associated edge Laplacian. If the graph G s is a directed spanning tree, then for SEKERCIOGLU et al. : ST ABILITY OF OPEN MUL TI-AGENT SYSTEMS O VER D YNAMIC SIGNED DIGRAPHS 5 any Q ∈ R ( N − 1) × ( N − 1) , Q = Q ⊤ > 0 , there exists a matrix P ∈ R ( N − 1) × ( N − 1) , P = P ⊤ > 0 such that P L e s + L ⊤ e s P = Q. (8) Pr oof: By assumption, the graph G s is a directed span- ning tree, and is therefore SB. Then, it consists of N − 1 edges, and L e s ∈ R ( N − 1) × ( N − 1) . Since the nonzero eigenv alues of L e s and L s coincide, the rank of L e s is N − 1 and L e s has eigen v alues only with positi ve real parts, so − L e s is Hurwitz. Then, giv en any Q = Q ⊤ > 0 , Q ∈ R ( N − 1) × ( N − 1) , there exists a symmetric positi ve definite matrix P ∈ R ( N − 1) × ( N − 1) such that P L e s + L ⊤ e s P = Q holds. For a signed digraph containing a directed spanning tree, we hav e the follo wing. Theor em 3: Let G s be a signed digraph of N agents in- terconnected by M edges. Let L e s be the associated directed edge Laplacian, which contains ξ zero eigenv alues. Then, the following are equiv alent: (i) G s contains a directed spanning tree; (ii) For any Q ∈ R M × M , Q = Q ⊤ > 0 , and for an y { α 1 , α 2 , . . . , α ξ } with α i > 0 , there exists a matrix P ( α i ) ∈ R M × M , P = P ⊤ > 0 such that P L e s + L ⊤ e s P = Q − ξ X i =1 α i P v r i v ⊤ l i + v l i v ⊤ r i P , (9) where v r i , v l i ∈ R M are, respecti vely , the normalized right and left eigenv ectors of L e s associated with the i th 0 eigen value. ξ satisfies ξ = M − N + 1 if the signed digraph is SB, and also if it is SUB with a root node or SB-rooted SCC; otherwise, ξ = M − N . Remark 2: In the case the considered digraph contains N edges and is SUB without a root node or without a SB-rooted SCC, (9) holds with ξ = 0 , so is equiv alent to (8). Pr oof: (i) ⇒ (ii): By assumption, the graph G s contains a directed spanning tree. Then, from Lemmata 4 and 5 from [24], it follows that the eigenv alues of L s depend on the structure of G s . Moreover , from Item (iii) of [24, Lemma 4], the nonzero eigen v alues of L s and L e s coincide. If G s is SB or SUB with either a root node or an SB-rooted SCC, L s has a unique zero eigenv alue, with the remaining N − 1 eigen values having positive real parts, i.e., 0 = λ 1 < ℜ e ( λ 2 ) ≤ · · · ≤ ℜ e ( λ N ) . If G s instead contains a SUB- rooted SCC, then all N eigenv alues have positiv e real parts, i.e., 0 < ℜ e ( λ 1 ) < ℜ e ( λ 2 ) ≤ · · · ≤ ℜ e ( λ N ) . L e s has ξ zero eigen v alues: 0 = λ 1 = · · · = λ ξ < ℜ e ( λ ξ +1 ) ≤ · · · ≤ ℜ e ( λ M ) , where ξ = M − N + 1 if the graph is SB or either contains either a root node or an SB-rooted SCC, and ξ = M − N , otherwise. Then, from Eq. (4) in [24], we can write the Jordan decomposition 3 of L e s as L e s = U Λ U − 1 = P ξ i =1 λ i ( L e s ) v r i v ⊤ l i + v r 1 v ⊤ l 2 + U 1 Λ 1 U − 1 1 where Λ 1 ∈ C ( M − ξ ) × ( M − ξ ) contains the Jordan blocks of L e s corresponding to the eigen v alues with positive real parts. The matrix U is given by U = v r 1 , · · · , v r ξ , U 1 ∈ C M × M , and 3 This is the general Jordan decomposition of L e s . Based on the graph structure, some of the elements may not appear . its in verse is U − 1 = h v ⊤ l 1 , · · · , v ⊤ l ξ , U † 1 i ⊤ ∈ C M × M . Here, v r i and v l i represent the right and left eigenv ectors of L e s , respectiv ely . The matrices U 1 and U † 1 contain the remaining M − ξ columns of U and U − 1 , respectively . From [25], the inner product between eigen vectors corresponding to distinct eigen v alues is zero. Since v r 1 and v l 2 are associated with different eigen values, we hav e v ⊤ l 2 v r 1 = 0 . Consequently , the matrix v r 1 v ⊤ l 2 , whenever present, has only zero eigen v alues, and has no effect. Then, for an y { α 1 , α 2 , . . . , α ξ } with α i > 0 , define R = L e s + P ξ i =1 α i v r i v ⊤ l i . From this decomposition and the fact that Λ 1 contains only eigen values with positiv e real parts, it is clear that ℜ e { λ j ( R ) } > 0 for all j ≤ M . That is, − R is Hurwitz; therefore, for any Q = Q ⊤ > 0 and α i > 0 , i ≤ ξ , there exists P = P ⊤ > 0 such that − P R − R ⊤ P = − Q . This is equi valent to − P [ L e s + P ξ i =1 α i v r i v ⊤ l i ] − [ L e s + P ξ i =1 α i v r i v ⊤ l i ] ⊤ P = − Q ⇔ P L e s + L ⊤ e s P = Q − P ξ i =1 α i ( P v r i v ⊤ l i + v l i v ⊤ r i P ) . (ii) ⇒ (i): Assume that the signed edge Laplacian has ξ + 1 zero eigen values and the rest of its M − ξ − 1 eigenv alues hav e positiv e real parts. In vie w of Lemmata 4 and 5 from [24], neither the property that L e s has ξ eigen v alues with positiv e real parts —with ξ = M − N + 1 if the graph is SB or contains a root node or a SB-rooted SCC, and ξ = M − N , otherwise— nor the fact that the graph contains a directed spanning tree hold. Now , the Jordan decomposition of L e s has the form L e s = U Λ U − 1 = P ξ +1 i =1 λ i ( L e s ) v r i v ⊤ l i + v r 1 v ⊤ l 2 + U 1 Λ 1 U − 1 1 with U = v r 1 , . . . , v r ξ +1 , U 1 ∈ R M × M and U − 1 = h v l 1 , . . . , v l ξ +1 , U † 1 i ⊤ ∈ R M × M . Let us consider R ( α i ) = L e s + P ξ i =1 α i v r i v ⊤ l i which admits the Jordan decomposition R ( α i ) := U Λ R U ⊤ , where Λ R ( α i ) := α 1 . . . α ξ 0 Λ 1 . Since we assume that L e s has ξ + 1 zero eigenv alues, R has one zero eigenv alue, and this cannot be positive definite. Then, there exists a matrix Q = Q ⊤ > 0 for which no symmetric matrix P = P ⊤ satisfies − P R − R ⊤ P = − Q . This contradicts statement (ii), completing the proof. For a signed digraph containing multiple leaders, we have the following. Theor em 4: Let G s be a signed digraph of N agents inter- connected by M edges, containing m leader groups. Let l 1 be the number of root nodes, l 2 S B be the number of SB-rooted SCCs, and l 2 S U B be the number of SUB-rooted SCCs, where m = l 1 + l 2 and l 2 = l 2 S B + l 2 S U B . Let L e s be the associated directed edge Laplacian. Then the following are equiv alent: (i) the graph has m leader groups, and given each follower ν j , ∀ j ∈ F , there exists at least one leader ν i , i ∈ L , such that there exists at least one path from ν i to ν j , (ii) for any Q ∈ R M × M , Q = Q ⊤ > 0 and for any { α 1 , α 2 , . . . , α ξ } with α i > 0 , there exists a matrix P ( α i ) ∈ R M × M , P = P ⊤ > 0 such that (9) holds, where v r i , v l i ∈ R M are the right and left eigenv ectors of L e s associated with the i th 0 eigen value. 6 Moreov er , ξ satisfies ξ = M − N + l 1 + l 2 S B whether the signed digraph is SB or SUB. Pr oof: (i) ⇒ (ii): By assumption, the graph G s contains multiple leader groups, as defined by Assumption 3. Then, from Lemma 7 in [24], it follows that L s has l 1 + l 2 S B zero eigen v alues, with the remaining eigenv alues having positi ve real parts, i.e., 0 = λ 1 = · · · = λ l 1 + l 2 S B < ℜ e ( λ l 1 + l 2 S B +1 ) ≤ · · · ≤ ℜ e ( λ N ) . Since the nonzero eigen v alues of L s and L e s coincide, L e s has ξ zero eigen values: 0 = λ 1 = · · · = λ ξ < ℜ e ( λ ξ +1 ) ≤ · · · ≤ ℜ e ( λ M ) , where ξ = M − N + l 1 + l 2 S B . Let γ and ξ be the geometric and algebraic multiplicities of the zero eigenv alues. Then, from Eq. (4) in [24], we can write the Jordan decomposition of L e s as L e s = U Λ U − 1 = P ξ i =1 λ i ( L e s ) v r i v ⊤ l i + P ξ − γ i =1 v r 2 i − 1 v ⊤ l 2 i + U 1 Λ 1 U − 1 1 . On the other hand, from [25] the inner product between eigenv ectors corresponding to distinct eigenv alues is zero. Since v r 2 i − 1 and v l 2 i are associated with different eigen v alues, we hav e v ⊤ r 2 i − 1 v l 2 i = 0 for i ∈ { 1 , 2 , . . . , 2( ξ − γ ) } . Consequently , the matrix v r 2 i − 1 v ⊤ l 2 i has only zero eigenv alues. The proof follows by the steps of the proof of Theorem 3. V . M A I N R E S U L T S This section presents our main results. W e consider the synchronization problem of OMAS modeled by (2) ov er dynamic directed signed graphs, and establish the practical asymptotic stability of the synchronization errors (6). First, we deriv e the synchronization errors using the edge-Laplacian notation introduced in Section II, and then reformulate the control problem accordingly . W e now proceed to deriv e the synchronization errors using the edge-Laplacian notation from Section II. At each mode ϕ ∈ P , using the definition of the incidence matrix, we may express the edge states in (4) in vector form e ϕ = E ⊤ s ϕ x, (10) where E s ϕ is the incidence matrix corresponding to the signed digraph at mode ϕ . From the definition of the directed Laplacian, we write the control law in (3) in vector form as u ϕ = − k 1 E s ⊙ ϕ e ϕ . (11) Differentiating the edge states (10) yields ˙ e ϕ = − k 1 E ⊤ s ϕ E s ⊙ ϕ e ϕ = − k 1 L e s ϕ e ϕ . (12) Similarly , differentiating the synchronization errors (6), ˙ ¯ e ϕ = [ I − P ξ ϕ i =1 v r ϕ i v ⊤ l ϕ i ] ˙ e ϕ = − k 1 [ I − P ξ ϕ i =1 v r ϕ i v ⊤ l ϕ i ] L e s ϕ e ϕ , we obtain ˙ ¯ e ϕ = − k 1 L e s ϕ ¯ e ϕ . (13) Remark 3: Observe that, to obtain (13), we distinguish two cases based on [24, T able 1, Eq. (5)]: the first case where ξ ϕ = γ ϕ , and the second where ξ ϕ > γ ϕ . Here, γ ϕ and ξ ϕ denote the geometric and algebraic multiplicities of the zero eigen v alue in mode ϕ ∈ P , respectively . • Case 1 ( ξ ϕ = γ ϕ ): In this case, all left eigenv ectors satisfy v ⊤ l ϕ i L e s ϕ = 0 . Consequently , we hav e ˙ ¯ e ϕ = − k 1 L e s ϕ e ϕ . Additionally , since L e s ϕ v r ϕ i = 0 , it also holds that ˙ ¯ e ϕ = − k 1 L e s ϕ [ I − P ξ ϕ i =1 v r ϕ i v ⊤ l ϕ i ] e ϕ . Finally , substituting (6) in the latter , we obtain (13). • Case 2 ( ξ ϕ > γ ϕ ): For i ∈ { 1 , 2 , . . . , ξ ϕ − γ ϕ } , we have the relations v ⊤ l ϕ 2 i − 1 L e s ϕ = v ⊤ l ϕ 2 i , v ⊤ l ϕ 2 i E ⊤ s ϕ = 0 , and L e s ϕ v r ϕ 2 i = v r ϕ 2 i − 1 , E s ϕ v r ϕ 2 i − 1 = 0 . The remaining 2 γ ϕ − ξ ϕ right and left eigenv ectors associated with zero eigen values satisfy L e s ϕ v r ϕ i = 0 and v ⊤ l ϕ i L e s ϕ = 0 . Thus, for this case as well, ˙ ¯ e ϕ = − k 1 L e s ϕ [ I − P ξ ϕ i =1 v r ϕ i v ⊤ l ϕ i ] e ϕ holds, and substituting (6) in the latter , Eq. (13) follows. The closed-loop system for the synchronization error dynamics is giv en as ˙ ¯ e ϕ ( t ) = − k 1 L e s ϕ ¯ e ϕ ( t ) , t ∈ [ t l , t l +1 ) , (14a) ¯ e ϕ ( t + l ) = Ξ ϕ, ˆ ϕ ¯ e ˆ ϕ ( t − l ) + Φ l , t = t l . (14b) The equation in (14b) formulates the edge state transition of the switched system at each switching instant t l , as described in [11], where ϕ = σ ( t ) ∈ P represents the activ e mode after switching, with t ∈ [ t l , t l +1 ) , while ˆ ϕ = σ ( ˆ t ) ∈ P denotes the previous mode, where ˆ t ∈ [ t l − 1 , t l ) . The matrix Ξ ϕ, ˆ ϕ ∈ B M ϕ × M ˆ ϕ is a matrix with elements in { 0 , 1 } that determines how the dimension of the error state ¯ e ˆ ϕ ( t − l ) transitions between modes. Here, ¯ e ˆ ϕ ( t − l ) represents the error states just before the switching instant, while ¯ e ϕ ( t + l ) represents the error states just after the switching instant. Φ l ∈ R M ϕ is a real-valued and bounded vector that captures instantaneous changes in the edge state e ϕ at the switching moment t l . These changes may arise from the addition or remov al of a node, which leads to the creation or deletion of an edge, or from changes in the sign or direction of interactions, which can cause switches between cooperation and antagonism, as well as shifts in leader–follower roles–see Figure 2. W e are now ready to present our main result on practical asymptotic stability of the origin of the error dynamics (14). The control objectiv e for (14) is to ensure that the origin is uniformly practically stable. Theor em 5: Consider the signed OMAS (2), under As- sumptions 1 and 2, in closed loop with the switching control law (11). Let ϕ, ˆ ϕ ∈ P be any two consecutive modes, where ˆ ϕ precedes ϕ . Let P ϕ be generated by (8) if the signed digraph is a directed spanning tree, and by (9) otherwise, where λ max ( P ϕ ) and λ min ( P ϕ ) the lar gest and the smallest eigen v alue of matrix P ϕ . Then, if the switching signal σ admits an average dwell time satisfying τ ϕ, ˆ ϕ ≥ ln(Ω ϕ, ˆ ϕ ) γ ϕ , (15) where Ω ϕ, ˆ ϕ = 1 + 2 λ max ( P ϕ ) λ min ( P ˆ ϕ ) and γ ϕ = k 1 1 λ max ( P ϕ ) are positiv e constants, the origin of the closed-loop system (14) is uniformly practically stable for all initial conditions. Pr oof: For each mode ϕ , let Q ϕ = Q ⊤ ϕ > 0 and α ϕ be arbitrarily fixed. By Assumption 2 and Theorem 3, there exists a matrix P ϕ = P ⊤ ϕ > 0 such that (9) holds, or if the considered graph is a spanning tree, such that (8) holds. In the case the digraph contains multiple leader groups, by Theorem SEKERCIOGLU et al. : ST ABILITY OF OPEN MUL TI-AGENT SYSTEMS O VER D YNAMIC SIGNED DIGRAPHS 7 4, there exists a P ϕ = P ⊤ ϕ > 0 such that (9) holds. Consider the L yapuno v function candidate V ϕ ( ¯ e ϕ ) := 1 2 ¯ e ⊤ ϕ P ϕ ¯ e ϕ . (16) For all τ ∈ [ t l , t l +1 ) , the deri v ativ e of (16) along the trajectories of (14a) yields ˙ V ϕ ( ¯ e ϕ ( τ )) = − k 1 ¯ e ϕ ( τ ) ⊤ P ϕ L e s ϕ ¯ e ϕ ( τ ) . If the underlying signed digraph is a directed spanning tree, using (8) with Q ϕ = I M ϕ × M ϕ , we obtain ˙ V ϕ ( ¯ e ϕ ( τ )) = − 1 2 k 1 ¯ e ϕ ( τ ) ⊤ ¯ e ϕ ( τ ) . If the underlying signed digraph contains a directed spanning tree or multiple leader groups, using (9) with Q ϕ = I M ϕ × M ϕ , we obtain ˙ V ϕ ( ¯ e ϕ ( τ )) = − 1 2 k 1 ¯ e ϕ ( τ ) ⊤ ¯ e ϕ ( τ ) + 1 2 ¯ e ϕ ( τ ) ⊤ P ξ ϕ i =1 α ϕ i ( P ϕ v r ϕ i v ⊤ l ϕ i + v l ϕ i v ⊤ r ϕ i P ϕ ) ¯ e ϕ ( τ ) . From the definition of the synchronization errors (6) and the fact that v ⊤ l ϕ i v r ϕ i = 1 , we hav e P ξ ϕ i =1 α ϕ i P ϕ v r ϕ i v ⊤ l ϕ i [ I − P ξ ϕ i =1 v r ϕ i v ⊤ l ϕ i ] e ϕ = P ξ ϕ i =1 α ϕ i P ϕ v r ϕ i v ⊤ l ϕ i e ϕ − P ξ ϕ i =1 α ϕ i P ϕ v r ϕ i v ⊤ l ϕ i e ϕ = 0 and ¯ e ⊤ ϕ [ I − P ξ ϕ i =1 v r ϕ i v ⊤ l ϕ i ] ⊤ P ξ ϕ i =1 α ϕ i v l ϕ i v ⊤ r ϕ i P ϕ = P ξ ϕ i =1 e ⊤ ϕ α ϕ i v l ϕ i v ⊤ r ϕ i P ϕ − P ξ ϕ i =1 e ⊤ ϕ α ϕ i v l ϕ i v ⊤ r ϕ i P ϕ = 0 . Thus, ˙ V ϕ ( ¯ e ϕ ( τ )) = − 1 2 k 1 ¯ e ϕ ( τ ) ⊤ ¯ e ϕ ( τ ) , in both cases. From the definition of V ϕ ( ¯ e ϕ ) and Rayleigh theorem [25, Theorem 4.2.2], we hav e 1 2 λ min ( P ϕ ) | ¯ e ϕ ( τ ) | 2 ≤ V ϕ ( ¯ e ϕ ( τ )) ≤ 1 2 λ max ( P ϕ ) | ¯ e ϕ ( τ ) | 2 , which giv es | ¯ e ϕ ( τ ) | 2 ≥ 2 V ϕ ( ¯ e ϕ ( τ )) λ max ( P ϕ ) . Consequently , giv en γ ϕ = k 1 1 λ max ( P ϕ ) , we obtain ˙ V ϕ ( ¯ e ϕ ( τ )) ≤ − γ ϕ V ϕ ( ¯ e ϕ ( τ )) . (17) Now , let ϕ, ˆ ϕ ∈ P be two consecutive modes and V ϕ ( ¯ e ϕ ( t + l )) := 1 2 ¯ e ϕ ( t + l ) ⊤ P ϕ ¯ e ϕ ( t + l ) , V ˆ ϕ ( ¯ e ˆ ϕ ( t − l )) := 1 2 ¯ e ˆ ϕ ( t − l ) ⊤ P ˆ ϕ ¯ e ˆ ϕ ( t − l ) . It follo ws from (14b) that for any t l , | ¯ e ϕ ( t + l ) | 2 ≤ 2 | Ξ ϕ, ˆ ϕ | 2 | ¯ e ˆ ϕ ( t − l ) | 2 + 2 | Φ l | 2 . Noting that | Ξ ϕ, ˆ ϕ | ≡ 1 , because it is a submatrix of an iden- tity matrix, and the singular values of an identity ma- trix are all 1, meaning that the lar gest singular v alue is also 1, V ϕ ( ¯ e ϕ ( t + l )) ≤ 1 2 | P ϕ || ¯ e ϕ ( t + l ) | 2 ≤ | P ϕ || ¯ e ˆ ϕ ( t − l ) | 2 + | P ϕ || Φ l | 2 . Since | ¯ e ϕ ( t − l ) | 2 ≤ 2 V ϕ ( ¯ e ϕ ( t − l )) λ min ( P ˆ ϕ ) , we hav e | P ϕ || ¯ e ˆ ϕ ( t − l ) | 2 + | P ϕ || Φ l | 2 ≤ 2 | P ϕ | V ϕ ( ¯ e ϕ ( t − l )) λ min ( P ˆ ϕ ) + | P ϕ || Φ l | 2 ≤ 2 λ max ( P ϕ ) λ min ( P ˆ ϕ ) V ˆ ϕ ( ¯ e ˆ ϕ ( t − l )) + λ max ( P ϕ ) | Φ l | 2 which giv es V ϕ ( ¯ e ϕ ( t + l )) ≤ Ω ϕ, ˆ ϕ V ˆ ϕ ( ¯ e ˆ ϕ ( t − l )) + Θ , (18) where Ω ϕ, ˆ ϕ = 1 + 2 λ max ( P ϕ ) λ min ( P ˆ ϕ ) and Θ = λ max ( P ϕ ) | Φ l | 2 . Since | Φ l | 2 is uniformly bounded, the term Θ is finite. Hence, the L yapuno v function at switching instants is upper bounded. From (17), (18), and in voking Theorem 1, it follows that the origin of system (14) is uniformly practically stable if the switching σ admits an av erage dwell-time that satisfies (15). V I . N UM E R I C A L E XA M P L E W e illustrate our theoretical findings by considering a signed OMAS evolving according to (2)–(3), initially represented by a SB signed digraph with four agents, where V 1 = { ν 1 , ν 3 } , V 2 = { ν 2 , ν 4 } . Over time, agents are added or ν 1 ν 2 ν 3 ν 4 e 1 e 2 e 3 e 4 (a) G 1 , ϕ 1 : [ t 0 , t 1 ) ν 1 ν 2 ν 3 ν 4 ν 5 e 1 e 2 e 3 e 4 e 5 (b) G 2 , ϕ 2 : [ t 1 , t 2 ) ν 1 ν 2 ν 3 ν 4 ν 5 ν 6 e 1 e 2 e 3 e 4 e 5 e 6 (c) G 3 , ϕ 3 : [ t 2 , t 3 ) ν 1 ν 2 ν 3 ν 4 ν 5 ν 6 ν 7 ν 8 e 1 e 2 e 3 e 4 e 5 e 6 e 8 e 9 e 7 (d) G 4 , ϕ 4 : [ t 3 , t 4 ) ν 1 ν 2 ν 3 ν 4 ν 5 ν 6 ν 7 ν 8 ν 9 e 1 e 2 e 3 e 4 e 5 e 6 e 8 e 9 e 7 e 10 (e) G 5 , ϕ 5 : [ t 4 , t 5 ) ν 1 ν 2 ν 3 ν 4 ν 5 ν 6 ν 7 ν 8 ν 9 e 1 e 2 e 3 e 4 e 5 e 6 e 8 e 9 e 7 e 10 (f) G 6 , ϕ 6 : [ t 5 , t 6 ) ν 1 ν 2 ν 3 ν 4 ν 5 ν 6 ν 7 ν 8 ν 9 e 1 e 2 e 3 e 4 e 5 e 6 e 8 e 9 e 7 e 10 (g) G 7 , ϕ 7 : [ t 6 , t 7 ) ν 1 ν 2 ν 3 ν 4 ν 5 ν 6 e 1 e 2 e 3 e 4 e 5 e 6 (h) G 8 , ϕ 8 : [ t 7 , t 8 ) ν 1 ν 2 ν 3 ν 4 ν 5 ν 6 e 1 e 2 e 3 e 4 e 5 e 6 e 7 (i) G 9 , ϕ 9 : [ t 8 , t 9 ) Fig. 2 : The black edges represent cooperative interactions, and the dashed red edges represent antagonistic interactions. remov ed, the signs of interconnections switch between co- operation and antagonism making the signed digraph SUB, and agents change roles, from being followers to leaders, as illustrated in Figure 2. Let k 1 = 4 and P ϕ be generated by (8) or (9) for each mode ϕ ∈ P , depending on the considered graph structure, with Q ϕ = I M ϕ × M ϕ , α ϕ j = 1 , j ≤ 7 , α ϕ 8 = 0 . 2 and α ϕ 9 = 0 . 4 . The initial conditions of the agents are [3 . 5 , 4 , − 2 , − 6 . 5 , 5 . 5 , − 10 . 5 , 3 . 5 , 12 , 5 . 5] . Lastly , the switching times in seconds are t 1 = 1 . 5 , t 2 = 3 , t 3 = 4 . 5 , t 4 = 6 . 8 , t 5 = 9 , t 6 = 12 , t 7 = 17 , and t 8 = 24 , which satisfy (15). The ev olution of the agents’ state trajectories is shown in Figure 3a, the edge states in Figure 3b, and the synchronization errors in Figure 3c. The peaks observed in Figure 3b correspond to the addition/remov al of edges and changes in edge signs or directions. Unlike the results in [18], which consider only undirected signed graphs where edge states always con ver ge to zero, here it is evident that the edge states do not always con ver ge to zero. For example, when the resulting graph contains multiple leader groups, i.e., when the system admits more than two equilibria, the edge states remain nonzero. Finally , Figure 3c shows that the synchronization errors con ver ge very close to zero, when (15) is satisfied. In contrast, in Figure 3d, when τ f ails to satisfy (15), the synchronization errors deviate noticeably from zero. V I I . C O N C L U S I O N In this paper , we addressed the synchronization problem of signed OMAS, where both cooperati ve and antagonistic interactions are present, and which potentially contain one or 8 0 5 10 15 20 25 30 -10 -5 0 5 10 (a) 0 5 10 15 20 25 30 -10 0 10 20 (b) 0 5 10 15 20 25 30 -10 -5 0 5 10 15 (c) 0 0.5 1 1.5 2 2.5 3 3.5 4 -10 -5 0 5 10 15 (d) Fig. 3 : Evolution of the trajectories. (a): Agents (2)-(3). (b): Edges (12). (c): Synchronization errors (14) when τ satisfies (15). (d): synchronization errors (14) when τ does not satisfy (15). multiple leader groups. W e extended the L yapunov equation- based characterization of the Laplacians of all-cooperative net- works with one zero eigen v alue to signed edge Laplacians with multiple zero eigenv alues. Finally , we analyzed the stability properties of the signed OMAS and in vestigated the different synchronization scenarios, from standard consensus to more complex scenarios of bipartite containment. Further research aims to extend these results to the case of constrained systems and discrete-time settings. R E F E R E N C E S [1] J. M. Hendrickx and S. Martin, “Open multi-agent systems: Gossiping with deterministic arri vals and departures, ” in 54th annual Allerton Confer ence on communication, contr ol, and computing , 2016, pp. 1094– 1101. [2] ——, “Open multi-agent systems: Gossiping with random arriv als and departures, ” in Proc. IEEE CDC , 2017, pp. 763–768. [3] E. Restrepo, A. Lor ´ ıa, I. Sarras, and J. Marzat, “Consensus of open multi-agent systems ov er dynamic undirected graphs with preserved connectivity and collision avoidance, ” in Proc. IEEE CDC , 2022, pp. 4609–4614. [4] D. V . Dimarogonas and K. J. Kyriakopoulos, “Decentralized navigation functions for multiple robotic agents with limited sensing capabilities, ” Journal of Int. and Robot. Syst. , vol. 48, pp. 411–433, 2007. [5] M. Abdelrahim, J. M. Hendrickx, and W . Heemels, “Max-consensus in open multi-agent systems with gossip interactions, ” in Proc. IEEE CDC , 2017, pp. 4753–4758. [6] M. Franceschelli and P . Frasca, “Proportional dynamic consensus in open multi-agent systems, ” in Proc. IEEE CDC , 2018, pp. 900–905. [7] ——, “Stability of open multiagent systems and applications to dynamic consensus, ” IEEE T rans. on Autom. Contr ol , vol. 66, no. 5, pp. 2326– 2331, 2020. [8] R. V izuete, C. M. de Galland, J. M. Hendrickx, P . Frasca, and E. Pan- teley , “Resource allocation in open multi-agent systems: an online optimization analysis, ” in Proc. IEEE CDC , 2022, pp. 5185–5191. [9] V . S. V arma, I.-C. Mor ˘ arescu, and D. Ne ˇ si ´ c, “Open multi-agent systems with discrete states and stochastic interactions, ” IEEE Contr ol Systems Letters , vol. 2, no. 3, pp. 375–380, 2018. [10] G. Oliva, M. Franceschelli, A. Gasparri, and A. Scala, “ A sum-of-states preservation framework for open multi-agent systems with nonlinear heterogeneous coupling, ” IEEE T rans. on Autom. Control , vol. 69, no. 3, pp. 1991–1998, 2023. [11] M. Xue, Y . T ang, W . Ren, and F . Qian, “Stability of multi-dimensional switched systems with an application to open multi-agent systems, ” Automatica , vol. 146, p. 110644, 2022. [12] E. Sebasti ´ an, E. Montijano, and C. Sag ¨ u ´ es, “ Adaptive multirobot implicit control of heterogeneous herds, ” IEEE T r ans. on Robotics , vol. 38, no. 6, pp. 3622–3635, 2022. [13] C. Altafini, “Consensus problems on networks with antagonistic inter- actions, ” IEEE T rans. on Autom. Control , vol. 58, no. 4, pp. 935–946, 2013. [14] A. Fontan and C. Altafini, “The role of frustration in collective decision- making dynamical processes on multiagent signed networks, ” IEEE T rans. on Autom. Contr ol , vol. 67, no. 10, pp. 5191–5206, 2022. [15] ——, “A signed network perspecti ve on the government formation process in parliamentary democracies, ” Scientific Reports , vol. 11, no. 5134, 2021. [16] P . S ¸ ekercio ˘ glu, E. Panteley , I. Sarras, A. Lor ´ ıa, and J. Marzat, “Dis- tributed bipartite containment tracking ov er signed networks with multi- ple leaders, ” IEEE Tr ans. on Control of Network Systems , vol. 11, no. 4, pp. 1975–1985, 2024. [17] G. Shi, C. Altafini, and J. S. Baras, “Dynamics over Signed Networks, ” SIAM Review , vol. 61, no. 2, pp. 229–257, 2019. [18] P . S ¸ ekercio ˘ glu, A. Fontan, and D. V . Dimarogonas, “Stability of open multi-agent systems ov er dynamic signed graphs, ” in Pr oc. IEEE Conf. on Dec. and Contr ol , 2025, pp. 7172–7177. [19] E. Panteley and A. Lor ´ ıa, “Synchronization and dynamic consensus of heterogeneous networked systems, ” IEEE T rans. on Autom. Control , vol. 62, no. 8, pp. 3758–3773, 2017. [20] E. Panteley , A. Lor ´ ıa, and S. Sukumar, “Strict Lyapunov functions for consensus under directed connected graphs, ” in Pr oc. European Contr ol Conf. , St. Petersbur g, Russia, 2020, pp. 935–940. [21] M. Du, B. Ma, and D. Meng, “Further results for edge conver gence of directed signed networks, ” IEEE T rans. on Cybernetics , vol. 51, no. 12, pp. 5659–5670, 2021. [22] P . Sekercioglu, “Control of Constrained Multi-agent Systems with Co- operativ e and Antagonistic Interactions, ” Ph.D. dissertation, Univ . Paris Saclay , Gif sur Yvette, France, 2024, https://theses.fr/2024UP AST130. [23] J. Hu and W . X. Zheng, “Emergent collectiv e behaviors on coopetition networks, ” Physics Letters A , vol. 378, no. 26-27, pp. 1787–1796, 2014. [24] P . S ¸ ekercio ˘ glu, A. Fontan, and D. V . Dimarogonas, “Edge-based syn- chronization over signed digraphs with multiple leaders, ” arXiv pr eprint arXiv:2602.19933 , 2026. [25] R. A. Horn and C. R. Johnson, Matrix Analysis . Cambridge University Press, 2012.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment