Design and Biomechanical Evaluation of a Lightweight Low-Complexity Soft Bilateral Ankle Exoskeleton
Many people could benefit from exoskeleton assistance during gait, for either medical or nonmedical purposes. But exoskeletons bring added mass and structure, which in turn require compensating for. In this work, we present a lightweight, low-complex…
Authors: Josée Mallah, Zakii Javed, Zafer Azak
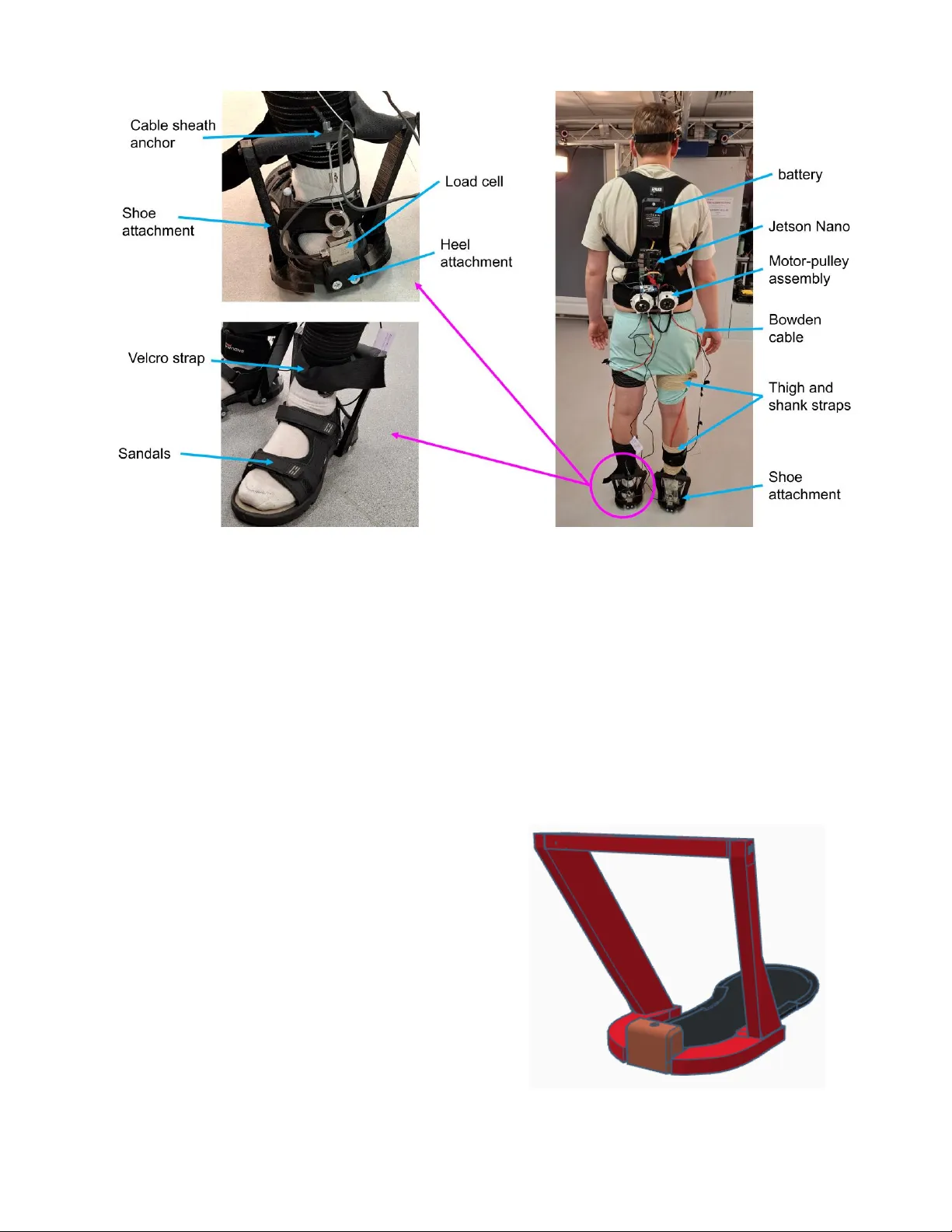
Abstract — Many people could benefit from e xoskeleton assistance during gait, for either medical or nonmedical purposes. But e xoskeletons br ing added mass an d structure , which in turn re quire compensating f or. In this work , we present a lightweight, l ow-complexity, soft bilateral ankl e exoskeleton for plantarflexi on assistance , with a sho e attachment design that can be mounted on top of any pair of shoes. Exp erimental tests show no significant difference in lower limb kinematics and kinetics when wearing the exoskeleton in zero-torque mod e relative to not wearing an exoskeleton, showing that ou r device does not obstruct the wearer’s hea lthy gait, and proving it as a compliant and comfortable device, promising to prov ide effective assistance . Hence, a co ntrol system was developed, and ad ditional tests are underway. I. I NTRODUCTI ON Walking is a basic locomoti on skill and consists in most of human daily m ovement [1], [2]. While it is extensively used by m any heal thy i ndividuals to undertake physica lly demanding tasks, such as walking on rough terrain and carryin g heavy weights (e.g. soldiers) , many other peopl e suffer from medical conditions that hinder th eir daily liv ing and autonomy, such as spinal cord injury, neurol ogical disorders , trauma ( e.g. stroke), cerebral palsy, etc [3] . However, both categories could bene fit from weara ble robotic assistance in the form of exoskeletons , which have been developed for both medical and nonmedical purposes. Medical exoskeletons help restore limite d or lost b ody functio ns due to medical conditions and are used for rehabilita tion purposes under professi onal super vision. Nonmedical d evices , on the o ther hand, usually come as augmentati on devices, assistin g healthy people through strength supplementati on, speed augmentation, or reduction of effort and metabolic cost required for some activities; exoskelet ons developed for elderl y assista nce in the context of healt hy aging also c ome under th is cate gory [3]. In parti cular, a nkle exoskel etons have garnered signific ant attention , as the ankle joint plays an essential role in human gait, producing more mechanic al power than eithe r the knee or the hip, and supporti ng balance during walkin g [4], [ 5], [6] . It is partic ularly affected by specific conditio ns, such as stroke and aging, which makes it responsi ble for the *J. Mallah is funded b y an Allen, Meek, and Read Cambridge Internatioal Scholarsh ip from Ca mbr idge Trust . This st udy was supp orted by MathWorks – Ca mbridge University Engineering Department (CUED) Small Grants Pr ogramme 2025. J. Mallah and L. G. Occhipinti * are with the Electrical Engineeri ng Division, Departme nt of Engineer ing, University of Cam bridge, Cambr idge, CB3 0FA, United K ingdom ( * corresp onding author: pho ne: 01223 3 32838 ; e-mail: lgo23@cam .ac.uk ). Z. Jave d, Z. Azak, and T. Stone are with t he C ambridge Univ ersity Hospitals NHS F oundation Trust , Cambridge CB22 5LD, Uni ted Kingdom. limited m obilit y of the individuals suffering from those conditio ns [4], [5], [6]. In particular, weakness in plantarfl exor muscles affects stability and propulsion [4], [7]. Assisting the ankle joint can provide optimal metaboli c consumptio n savin gs [8], as increasi ng the mechanical power output of the ankl e decreases the power demands on the hip, leading t o impr oved walki ng eff icienc y [6]. Two types of exoskeleto ns have b een developed over time, from an actuatio n point of view: passive and acti ve. Despite their light weight, passive devices have limited controll ability and str uggle to break the metabolic cost barrier, due to their inability to provide enough positive power to overcome the added device mass [9], [10], [11], and therefo re, their activ e counterpa rts were proven more effective [3]. While many platfor m exos keleto ns have b een proposed, being beneficial f or keeping the actuator m ass off the wearer’s body, wearab le untethered exoskel etons can be worn duri ng daily life, providi ng assista nce on the go [3]. Hence, acti ve wear able desi gns mak e the o ptimal ch oice. Exoskelet ons can be classified into r igid, hybrid, and soft based on the rigidity of the structu re used. Hybrid and soft designs often opt for flexi ble force transmis sion, using Bowden cables [12], [13], [14] and present an adva ntage in terms of complianc e and user comfort, which makes the devices ideal for exten ded u se. Many exoskel etons provide unilateral assistance, whic h is b enefici al in cases such as stroke, where o nly one side is impaired; however, for other user categ ories, especially healthy users with no impai rments , bilateral devices would preserve gait symmet ry, and are known to provide greater metabolic benefi ts [15]. One problem with exoskel etons is the added mass and rigid struct ure , as increasin g exoskeleton weig ht impedes gait (increase d step length, d ecrease d step height [16]) and dynamic balance [17] and increases metabolic consumptio n, especiall y when the weight is added distally o n the legs [18], [19] , even shifting the focus o f the assistanc e to merely offsetti ng the added device mass and keeping the same metabolic consumptio n levels as during unassist ed mo vemen t [20], [21]. I n fact, many studies have report ed changes in kinematics and/or kinetics away from the d esired healthy walking patterns in zer o-torque mode [13], [22], [23]. Henc e the inter est i n softer , light er devices [3 ]. Moreover, we rec ently proposed a complexity index in [3] allow ing to evaluate how complex an exoskel eton design is, with an obvious preference for less complex devices , which are inherently easier to develop and less expe nsive. The complexit y index is defined as a weighed sum of factors spanning the number o f assisted limbs (L), the number of degrees of free dom (D), and the numbers of se nsors (S) and Design and Biom echanical Evaluation o f a Lightweight Low- Complexity Soft Bilateral Ankle Exoskeleton Josée Mallah, Zaki i Javed, Zafer A zak, Thomas S tone, and Luigi G. Occhipin ti, Senior Member, IEEE Figure 1. Full e xoskeleton worn b y the study partici pant, compris ing the back s upport structure carrying the battery, t he controller, an d the actuatio n assembly. The Bowden cables r un all the way down to the a nkl e, and are ro uted on the le gs using textile stra ps at the thighs and s hanks. The s hoe attachment, incl uding the cab le sheath anchori ng structure and heel attachm ent, is shown closely on the left, al ong with the Velcro stra p that secures i t to the shank. Figure 2. CAD draw ing, showi ng the cable sh eath anchoring s tructure (red) and the hee l attachmen t serving as load cell mount (brow n). actuators (A) i n a device. T herefor e, we are ai ming for a device wit h low complexit y. This paper introduces a lightweight, low-compl exity, active b ilate ral ankle exoskeleton with hybrid r igidit y (Fig. 1) , b ased on a s hoe attac hment on top of fl exible, co mfortabl e shoes, and obse rves its impact on lowe r limb biomecha nics in zero-torq ue mode, proving its c omplia nce, being non - obstructi ng to the wearer ’s gait. We also discuss the control system design, with plans to test the powered exoskeleto n in future wo rk. II. E LECTROMECHANI CAL D ESIGN OF THE A NKLE E XOSKELETON We developed a wearable, hybrid-ri gidity , battery- powered, and self-contai ned ankle exoskeleto n capable of providin g bilateral planta rflexi on assistance. A back-m ounted actuati on assembly trans mits force through Bowden cables to the an kle j oint: t he inne r Bo wden cabl e runs all the way down to a load cell mounted on a heel attachment, while the external sheath is anchored near the lower shank. We wanted to k eep the d esign “as soft as possible” ; howeve r, the Bowden sheat h anchor at the shank experiences significa nt downwards forces when the inner cable is pulled up, a problem which was explai ned by [24], and which could potentiall y explain why fully soft ankl e ex oskeletons are stil l a min ority [3]. He nce, we d esigned a rigi d sheath anchor (Fig. 2) that mounts on the shoe, preventing the sheath from sliding downwards, and allowing for effective forc e transmissi on. The v ertical rods go up on the sides away from the user’s leg, and the horizontal bar goes behin d the shank, and is wrapped around it using a Velcro strap, which allows to fit different calf sizes, makes sure that the rigid str ucture barely touches t he w earer ’s le g, an d d oes n ot obstruct it s natural movement. This struct ure comes as a shoe attachment instead of a full foot module or shoe replacement; it can be mounted onto any pair of shoes, which could contribute to increased user acceptanc e. For demonstr ation, we are u sing a pair of strapped sandals , which fits p eople with n eighb oring shoe siz es. The actuati on assem bly consi sts of two quas i-direct -drive motors (PDA08, Daran Robotics), each connected to a pulley and a Bowden cable. The inne r Bowden cable is connected to a 500 N load cell (DYLY 08, DYSENSOR ) mounted on a heel attac hment, all owing to measure the transm itted tens ion and provide feedback to the control syste m to ensure proper tracki ng of the desired torque. The back-mounte d assembly also includes t he processor board ( Jetso n Nano B01, NVIDIA), which communic ates with the motors via CAN bus in terfac e, an d a 24 V, 4 Ah lit hium-ion b attery pack (G24B2, ASUNCELL) which powers the m otors and the processor v ia a 24-5 V step-d own converter. Force sensiti ve resistors (FSR402, Youmile) are placed on the shoe sole beneath the heel, allowing for h eel strik e detection. The overall device m ass remains below 2.5 kg (T able I). III. E XPERIMENTAL S ETUP A. Data Co llection This st udy w as app roved b y the Ethics C ommittee at the Departme nt of En gineerin g, University of Cambridge (Referenc e No. 639). One healthy subje ct was recruit ed (29- year-old male, 1 .78 m, 80.4 kg). The same subject had been partici pating in multiple exoskelet on testing sessions and has therefo re acq uired sig nificant exper ience walking wit h the device. The data were collected in the gait lab at the Cambridge Prosthe tic and Orthoti c Service. Motion capture data were collect ed using a Vicon system (©Vicon Moti on Systems Ltd., Oxford, UK) comprisin g 12 infrare d cameras and two synchroniz ed video cameras. Ground reaction forces were collected using two AMTI Hall-effect force plates (©Advanced Mech anical Technology, Inc ., Wate rtown USA). A Helen Hayes marker set was applied using the Vicon Plug-in Gait model. Reflective m arkers were place d bilaterall y on the anterior superior iliac spines (ASIS), posteri or su perior ilia c sp ines (PSIS), l ateral ti bias/shanks , lateral thighs, lat eral femoral epico ndyles, lateral m alleoli , heels (posteri or calcaneus) , and seco nd metatarsa l heads (foref oot/toe), in additi on to a few major upper body landmarks. The participant walked in straight lines at a self- selected speed. B. Experimental Co nditions T wo walking conditi ons were consider ed, allowing to observe the separate impact of the exoskeleto n added mass : (1) No Exoskeleton – the participa nt walks in unmodified shoes, similar to those used in the exoskeleton; (2) Exoskelet on Off – the partici pant walks while wearing the exoskelet on unpow ered/in zero-torq ue mode (Fig . 1). TABLE I. E XOSKELETON WEIGHT BREAKDOWN Part Weight (g) Motors 812 Battery 670 Jetson Nano 141 Cables 48 Shoe attachmen ts 600 Total 2,271 (< 2,50 0 overall) C. Data Processing Kinematic and kinetic d ata were proce ssed usin g th e Vicon Nexus softwar e (v ersion 2.18) and saved to c3d files. A Woltring filter with a mean square error of 10 [25] was applied to the m arker trajectories, as per the Vicon Nexus default configur ation. Each trial was reconstructed to crea te 3D markers from raw camera data, the marker trajectories were labeled; p re-set gap -filling an d filtering too ls were used to fill the gaps in the mark er trajec tories. Gait events were manually marked upon visual observation of vid eo recordings. Python scripts were then u sed to extr act gait ev ents , kinematic, and kinetic data from the c3d f iles, using the ezc3d lib rary [26]. Kinematics and kinetics wer e segmen ted by stride and time-nor malized to 101 sam ples corresponding to 0-100% g ait cycle using linear in terpolation. To com pare between the two exper imental cond itions, a linear mixed-ef fects model (LME) an d two o ne-sided tests (TOST) wer e used. For each scalar feature, a n LME was fit at the stride level with conditio n as a fix ed effect and trial as a r andom intercept, as each trial includes multiple strides. Then, trial-level means wer e computed over the strides, and TOST was performed using a Welch standard error , with equivalence bo unds of ±2° for the angles and ±0.05s for the durations . Statistical significance was set to α = 0 .05. IV. R ESULTS In order to evaluate the biomechan ical imp act of the added exoskeleto n mass and structure , we observe the kinematics the three major lower-limb jo ints: ankle, knee, and hip flexion , along with the kinetics of the ankle , and some tempo ral gait parameters. A. Kinematics Fig. 3-a shows the ankle joint angles in the N o Exoskelet on and Exos keleton Off modes . Table II provide s the average range of motion ROM of ea ch joint in both conditio ns. The statisti cal analysis shows no significa nt differ ence in ankle planta rflexion ( LME: p= 0.46, TOST: d iffe rence=0.2 ) . A slight d iffe rence is observe d for dorsifle xion ( LME: p<0.01, diff=1.2 4 °) but still withi n TOST equivalence bounds (diff=1.32°) . The re is no statisti cally significan t differe nce in r ange of motion (p= 0.15). B. A nkle Kinetics Fig. 3-b shows the ankle flexion moment in both experiment al cond itions over t he gait c ycle. The statistic al analysis shows no difference in peak plantarfl exion moment (p=0.98) between the two experiment al cond itions. C. Temporal P arameters Table III presents the tempora l parameters consider ed: gait cycle duration, stance and swing phases durations and percenta ges of t he gait cycle. Despite having a statis ticall y significant difference in gait cycle dura tion (LME: p<0.0 1), the d urations are eq uivale nt at (a) (b) Figure 3. An kle kinematics ( a) and kineti cs (b) in No Exoskeleton (orange) and E xoskeleton O ff (blue) modes. TABLE II . A VERAGE JOINT RANGE OF MOTION W ITHOUT AND WITH EXOSKELETON Joint ROM ( ° ) No Exoskeleton Exoskeleton Off Ankle Flexion 29.785 ± 1.907 29.096 ± 4.017 Knee Flexion 55.976 ± 3.525 59.124 ± 5.528 Hip Flexion 47.939 ± 2.217 45.994 ± 5.848 TABLE III . TEMPORAL GAIT PARAMETERS WITHOUT AND WITH EXOSKELETON Parameter No Exoskeleton Exoskeleton Off Gait cycle durat ion (s) 0.980 ± 0.027 1.003 ± 0.032 Stance phase dur ation (s) 0.559 ±0.023 0.572 ± 0.108 Stance phase percentage (GC%) 57.072 ± 1.795 56.934 ± 10.356 Swing phase durat ion (s) 0.421 ± 0.022 0.4311 ± 0.098 Swing phase percentage (GC%) 42.928 ± 1.795 43.066 ± 10.356 the ±0.05s bound (TOS T: dif f=-0.0241). Stance and swi ng times and percentages have no significant difference s (p=0.39, 0.98, 0. 51, 0.9 8 respecti vely). V. C ONTROL DESI GN The contr ol algori thm con sists of a closed loop torque/cab le tension control (Fig. 4). A proportional integral derivati ve (PID) controlle r with a feed forwar d element is used to track the desired cable tensi on, which is trac ked by the load cell. The torque was defined as a timed trajectory based on Zhang et al. [27], using four main parameters: rise time, peak tim e, fall time (gait cycle p erce ntage GC%), and peak tor que (Nm). In this paper, we set the paramete rs to 23.2, 50.4, 62.7 GC%, and 17 kg of tensio n, which is equivale nt to 10 Nm at the ankle. Heel stri ke detection wa s achieved using FSRs , all owing t o compute GC%. VI. D ISCUSSION The objective of this pap er was to introduce a ligh tweight hybrid-rig idity bilateral ankle exosk eleton and evaluate its impact on lower limb biomechanics in zero torque mod e. A control system was designed and is planned to b e tested in the gait lab in future work. We aimed f or a relatively soft exoskeleto n design, for the parts in contact with the user’s body, using a flexible transmission and textile straps. A rigid cable anchorin g structure ended up being crucial to ensure effective force transmission to the an kle bu t is presen ted as a shoe attachment that can be mo unted on the u ser’s preferred pair of shoes. Th ese design choices allo wed f or a ligh tweight final device (<2.5 kg), which comes in the very lower end fo r bilateral ankle exoskeleton s, for which the weight range [3] goes from around 1.73 -2.07 kg f or Orekhov et al. [12] up to 10 kg in Li et al. [28] an d is well below the 4 kg limit recommended by [3] as an o ptimal comp romise b etween metabolic savin gs, design complexity, and device weight. Furthermor e, in ter ms o f design complex ity, our presen t exoskeleto n achieves a complexity index of 2 (L = 2, D = 1, S = 4, A = 2) , p lacing it again on the lower end for bilateral ankle exoskeleto ns, relative to a ran ge [ 3] from 1.7 for both Orekhov et al. [29] and Mooney et al. [30] to 4.4 for Zh ao et al. [31]. Lower-limb joints – ankle, knee, and hip – are closely related, and altering the b ehavior of one is likely to affec t the others. Moreover, many exoskeleton studies h ave reported unnatural gait patterns in zero-torque m ode . Gaspar ri et al. [22] r eported ex cessive ankle do rsiflexion and a redu ced ankle ROM. Xia et al. [1 3] also had a g eneral trend of reduced ankle ROM across sub jects. Shafer et al. [23] reported excessive peak b iological an kle momen ts. Therefore, we evaluated the impact o f our device in zero- torque mode on the kinematics o f th e three joints, as well as on the kinetics o f the ankle, to ensure that the user’ s ankle joint does not need to prov ide add itional biological torque to counteract the exoskeleton added mass an d structure. Despite seeing a difference in peak knee f lexion between the two exp erimental conditions in Table II, L ME verifies that the difference is not significant (p=0.24). Therefore the experimen tal results show that the kinematics of the three Figure 4. Contro l system arc hitecture lower-limb joints , the kinetics of the ankle , and the tem poral parameters of gait, in term s of the total g ait cycle duration and stance and swing duration and p ercentages , do n ot generally have significan t differen ce b etween th e No Exoskeleton and Ex oskeleton Off co nditions , proving that our exoskeleton does not obstruct a healthy user’s gait. Eventually, we propose a control system for the exoskeleton , based on PID tension control at the low -level, and a GC% estimation based on heel strike detection from FSRs, allowing to track a desired tim ed tension/torque trajectory at the m id-level. Future work would ev aluate the powered exoskeleton, a s well as reconsider th e mechanical transmission design in a way to potentially allow for t h e provision o f higher torques and expand the design to provide dorsiflexion assistance. A CKNOWLEDGMENT The authors wo uld like to acknowledge ad vice and support from Z. Wang and F. Fo rni in control system design, as well as Y. Zhu and O. Griff iths in mechanical s ystem design and prototyping. R EFERENCES [1] H. G. Chambers and D. H. Suther land, ‘A Practical Guide to Gait Analysis’, JAAO S - J. Am. Acad. Or thop. Surg. , vol. 10, n o. 3, 2002, [Online]. Available: https://journals. lww.com/jaaos/fu lltext/2002/ 05000/a_practi cal_guid e_to_gait_ana lysis.9.aspx [2] J. Mallah, Y. Zhu, K. Xu, G. S. Virk, S. Bai, and L. G. Occhi pinti, ‘Real -Time Prediction of Lower Limb Joint Kinematics, Kinetics, and Ground Reaction Force using Wearable Sensors and Machine Learning’, Jan. 2026, doi: 10. 48550/arXiv.2601. 18494. [3] J. Mallah et a l. , ‘A System atic Review of Sensi ng and Control Strategies of Wearable Active Ankle Exoskeletons/Exosuits , With Performance Assessment Based on a Complexity Index’, IEEE Sens. Rev. , vol. 2, pp. 3 82 – 396, 2025, d oi: 10.1109/SR.20 25.3588140. [4] B. Shi et al. , ‘Wearable Ankle Robots in Post -stroke Rehabilitation of Gait: A Systematic Review’, Fro nt Neurorobot , vol . 13, p. 63, 2019, doi: 10.33 89/fnbot.2019.0 0063. [5] K. E. Gordon and D. P. Ferris, ‘Learning to walk with a robotic ankle exoskeleton’, J Biomech , vol. 40, no. 1 2, pp. 2636 – 44, 2 007, doi: 10.1016/j.jb iomech.2006.1 2.006. [6] S. N. Fickey, M . G. Browne, and J. R. Franz, ‘Biomechanical effects of augmented ankle power output during human walki ng’, J Exp Biol , vol. 22 1, no. Pt 22, N ov. 2018, doi: 10.1242/je b.182113. [7] E. A. Morris et al. , ‘ Actuati on Timin g Str ategies f or a Portable Powered Ankle Foot Orthosis’, presented at the ASME 2011 Dynamic Systems and Control Conference and Bath/ASME Symposium o n Fluid Power and Motion Control, 2011, pp. 807 – 814. doi: 10.11 15/dscc2011-6170. [8] P. W. Franks, G. M. B ryan, R. M. Martin, R. Reyes, A. C. Lakmazaheri, and S. H. Collins, ‘Comparing optimized exoskelet on assistance of the hip, knee, and ankle in single and multi -joint configurations’, Wearable Technol , vol. 2, p. e16, 2021, doi: 10.1017/wtc.20 21.14. [9] S. Viteckova et al. , ‘Empowering lower limbs exoskeletons: state - of -the- art’, Robotica , vol. 36, no. 11, pp. 1743 – 1756, 2018, doi: 10.1017/s026 3574718000693. [10] L. Quinto, P. Pinheiro, S. B. Goncalves, I. Roupa, P. Simões, and M. Tavares d a Silva, ‘Analysis of a passive ankle exoskeleton for reduction of meta bolic costs durin g walking’, Def. Technol. , vol. 37, pp. 62 – 68, Jul. 20 24, doi: https ://doi.org/10.1016 /j.dt.2023.11.01 5. [11] E. Etenzi, R. Borzuola, and A. M. Grabowsk i, ‘Passive -elastic knee- ankle exoskeleto n reduces the metabolic cost of walking’, J. NeuroEngineerin g Rehabil. , v ol. 17, no. 1, p. 104, Jul. 2020, doi: 10.1186/s129 84-020-00719- w. [12] G. Orekhov, Y. Fang, J. Luque, and Z. F. L erner, ‘Ankle Exoskeleton Assistance Can Improve Over-Ground Walking Economy in Individuals With Cerebral Palsy’, IEEE Trans. Neural Syst. Rehabil. Eng. , vol. 28, no. 2, pp. 461 – 467, 2020, doi: 10.1109/TNSRE. 2020.2965029. [13] H. Xia, J. Kwon, P. Pathak, J. Ahn, P. B. Shull, and Y. L. Park, ‘Design of A Multi -Funct ional Soft Ankle Exoskeleton for Foot- Drop Prevention, Propuls ion Assistance, and Inversion/Eversion Stabilization’, presented at the 2020 8th IEEE RAS/EMBS International Conference for B iomedical Robotics and Biomechatronics (BioRob), Dec. 2020, pp. 118 – 123. doi: 10.1109/BioRob4 9111.2020.922 4420. [14] J. Bae et a l. , ‘A Lightweight and Efficient Portable Soft Exosuit for Paretic Ankle Assistance in Walking After Stroke’, presented at t he 2018 IEEE International Conference on Robotics and Automation (ICRA), May 2018, pp. 2820 – 2827. doi: 10.1109/ICRA.20 18.8461046. [15] P. Malcolm, S. Galle, P. Van den Berghe, and D. De Clercq, ‘Exoskeleton assistance symmetry matters: unilateral assistance reduces met abolic cost, but relative ly less than bilateral assistance’, J. NeuroEngi neering Rehabil. , vol. 15, no. 1, p. 74, Aug. 2018, doi: 10.1186/s129 84-018-0381- z. [16] X. Jin, Y. Cai, A. Prado, and S. K . Agrawal, ‘Effects of exoskeleton weight and inertia on hum an walking’, presente d at the 2017 IEEE International Conference on Robotics and Automation (ICRA), Jun. 2017, pp. 1772 – 17 77. doi: 10.110 9/ICRA.2017.7 989210. [17] M. A. Normand, J. Lee, H. Su, and J. S. Sulzer, ‘The effect of hip exoskeleton weight on kinematics, kinetics, and electromyography during human walking’, J. Biom ech. , vol. 152, p. 111552, May 2023, doi: https ://doi.org/10. 1016/j.jbiome ch.2023.11155 2. [18] I. Coifman, R. K ram, and R. Riemer, ‘Metabolic power response to added mass on the lower ext remities d uring running’, Appl. Ergon. , vol. 114, p. 1 04109, Ja n. 202 4, doi: https://doi.org /10.1016/j.aperg o.2023.104109. [19] R. C. B rowning, J. R. Modica, R. Kram, and A. Goswam i, ‘The effects of adding mass to the legs on the energe tics and biomechanic s of walking’, Med Sci Spo rts Exerc , vol. 39, no. 3, pp. 515 – 25, Mar. 2 007, doi: 10.1249/mss .0b013e3 1802b3562. [20] C. Siviy et al. , ‘Opportunities and challenges in the development of exoskeletons for locomotor assistance’, Nat. Biom ed. Eng. , vol. 7, no. 4, pp. 456 – 47 2, Apr. 2023, doi: 10.1038/s4 1551-022-00984- 1. [21] G. S. Sawicki, O. N. Beck, I. Kang, and A. J. Young, ‘The exoskeleton expansion: improving walking and running economy’, J. NeuroEngineering Rehabil. , vol. 17, no. 1, p. 25, Feb . 2020, doi: 10.1186/s12984- 020-00663- 9. [22] G. M. Gasparri, M. O. Bair, R. P. Libby, and Z. F. Le rner, ‘Verification of a Robotic Ankle Exoskeleton Control Scheme for Gait Assistance in Individuals with Cerebral Palsy’, presented at the 2018 IEEE/RSJ Internation al Conference on Intelligent Robots and Systems (IROS) , Oct. 2018, pp. 4673 – 4678. doi: 10.1109/IROS .2018.8593904. [23] B. A. Shafer, S. A. Philius, R. W. Nuckols, J. McCall, A. J. Young, and G . S. S awicki, ‘Neuromecha nics and E nergetics of W alking With an Ankle Exoskeleton Using Neuromuscular-Model Based Control: A Parameter Study’, Front. Bioeng. Biotechnol. , vol. Volume 9-2021, 2021, doi: 10. 3389/fbioe.20 21.615358. [24] Z. Wang, C. Chen, F. Yang, Y. Liu, G. Li, and X. Wu, ‘Real -Time Gait Phase Estimation Based on Neural Network and Assistance Strategy Based on Simulated Muscle Dynamics for an Ankle Exosuit’, IEEE Trans. Med. Robo t. Bionics , vol. 5, no. 1, pp. 100 – 109, 2023, doi: 1 0.1109/tmrb.20 23.3240284. [25] H. J. Woltri ng, ‘A Fortran package for generalized, cross-validat ory spline smoothing and differentiation’, Adv. Eng. Softw. 1978 , v ol. 8, no. 2, pp. 104 – 113, Apr. 1 986, doi: 10.1016/0141-1195(86)90098- 7. [26] B. Michaud and M. Begon, ‘ezc3d: An easy C3D file I/O c ross - platform solution for C++, Python and M ATLAB’, J. Open S ource Softw. , vol. 6, no. 58, p. 2911, 2 021, doi: 10.21 105/joss.02911. [27] J. Zhang et al. , ‘Human - in - the-loop optimi zation of exoske leton assistance during walking’, Science , vol. 356, n o. 6344, pp. 1280 – 1284, Jun. 2017, doi: 10.112 6/science.aal5054. [28] Y. Li, Z. Li, G. Li, T. Wang, J. Zhang, and D. Fu, ‘Learning -Based Trajectory Adaption and Neural Net work -Based Control o f a Soft Exosuit’, presented at the 2023 IEEE International C onference on Development and Learning (ICDL), Nov. 2023, pp. 506 – 511. doi: 10.1109/ICDL5 5364.2023.103 64500. [29] G. Orekhov and Z. F. Lerner, ‘Design and Electromechanical Performance Evaluation of a Powered Parallel-Elastic Ankle Exoskeleton’, IEEE Robot. Autom. Lett. , vol. 7, no. 3, pp. 8092 – 8099, 2022, doi: 1 0.1109/LRA. 2022.3185372. [30] L. M. Mooney, E. J. Rouse, and H. M. Herr, ‘Autonomous exoskeleton reduc es metabolic cost of human walking’, J. NeuroEngineerin g Rehabil. , vol. 11, no. 1, p. 151, Nov. 2014, doi: 10.1186/1743-0 003- 11 -151. [31] L. Zhao et al. , ‘Bi omechanical Design, Modeling and Control of an Ankle- Exosuit System’, in I ntelligent Robotics and A pplications. Springer Nature Singapore, 2023, pp. 489 – 502.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment