GS-SBL: Bridging Greedy Pursuit and Sparse Bayesian Learning for Efficient 3D Wireless Channel Modeling
Robust cognitive radio development requires accurate 3D path loss models. Traditional empirical models often lack environment-awareness, while deep learning approaches are frequently constrained by the scarcity of large-scale training datasets. This …
Authors: Mushfiqur Rahman, Ismail Guvenc, David Matolak
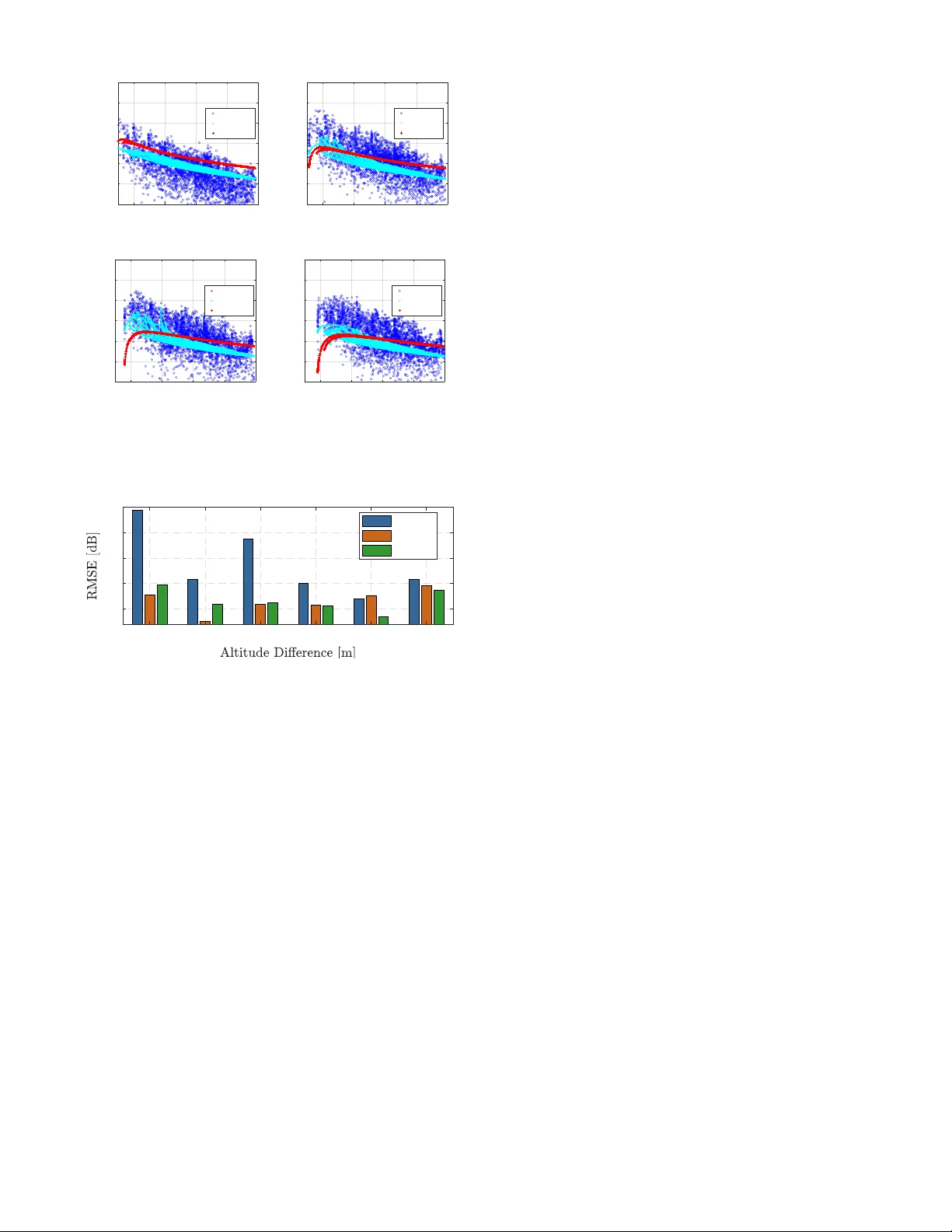
GS-SBL: Bridging Greedy Pursuit and Sparse Bayesian Learning for Ef ficient 3D W ireless Channel Modeling Mushfiqur Rahman (1) , ˙ Ismail G ¨ uvenc ¸ (1) , and David Matolak (2) (1) Department of Electrical and Computer Engineering, North Carolina State Univ ersity , Raleigh, NC 27606, USA (2) Department of Electrical Engineering, Univ ersity of South Carolina, Columbia, SC 29208, USA Abstract —Robust cognitive radio development requir es accu- rate 3D path loss models. T raditional empirical models often lack en vironment-awareness, while deep learning approaches are frequently constrained by the scarcity of large-scale training datasets. This work leverages the inherent sparsity of wireless propagation to model scenario-specific channels by identifying a discrete set of virtual signal sources. W e propose a novel Greedy Sequential Sparse Bayesian Learning (GS-SBL) framework that bridges the gap between the computational efficiency of Or - thogonal Matching Pursuit (OMP) and the rob ust uncertainty quantification of SBL. Unlik e standard top-down SBL, which up- dates all source hyperparameters simultaneously , our approach employs a “Micro-SBL ” ar chitecture. W e sequentially evaluate candidate source locations in isolation by executing localized, low- iteration SBL loops and selecting the sour ce that minimizes the L 2 residual error . Once identified, the source and its corresponding power ar e added to the support set, and the process repeats on the signal residual to identify subsequent sources. Experimental results on real-w orld 3D pr opagation data demonstrate that the GS-SBL framework significantly outperforms OMP in terms of generalization. By utilizing SBL as a sequential sour ce identifier rather than a global optimizer , the proposed method pr eserves Bayesian high-resolution accuracy while achieving the execution speeds necessary for r eal-time 3D path loss characterization. I . I N T RO D U C T I O N W ireless node density in 3D space is surging, particu- larly with the widespread adoption of unmanned aerial vehi- cles (U A Vs) [1]. Operating in shared 3D en vironments, these heterogeneous de vices require reliable, seamless connecti vity . T o mitigate the resulting spectrum scarcity , dynamic spectrum sharing via cognitiv e radio (CR) has emerged as a piv otal solution. Central to CR is the generation of an accurate radio en vironment map (REM), which utilizes field measurements and path loss models to pro vide a comprehensiv e spatial representation of power spectral density within a region of interest [2]. Existing path loss models generally f all into tw o categories: generic statistical models, such as the Okumura- Hata model, and environment-specific data-driv en models, in- cluding deep learning and spatial interpolation techniques like Kriging or In verse Distance W eighting (IDW) [3]. While sta- tistical models often fail to account for complex 3D obstacles and site-specific building geometries, data-dri ven approaches suffer from significant computational overhead or prohibiti ve storage requirements. In this context, compressed sensing (CS) emerges as a superior alternativ e [1]; by identifying a sparse set of virtual signal sources, CS-based modeling aligns with the underlying physics of wireless propagation while maintaining low computational complexity . Base Station (BS) GS-SBL Sources Fig. 1: U A V -based signal strength measurements at 30 m and 110 m altitudes. The red triangle ( △ ) indicates the physical signal source, while the violet circles ( ◦ ) denote the six predicted “virtual” source centers ( N SBL = 6 ), each representing a 25 m × 25 m × 10 m spatial cell. In CS-based recovery , signal measurements are decomposed into a propagation-go verned sensing matrix and a sparse v ector representing potential source powers [1]. Since the number of actual signal sources is typically negligible compared to the vast 3D spatial grid, the majority of the entries in the sparse vector are expected to be zero. Consequently , the final radio en vironment is modeled as the superposition of REMs generated by the “virtual” sources detected by the reco very algorithm. Traditional non-Bayesian methods, such as the Least Absolute Shrinkage and Selection Operator (LASSO) [4] and Orthogonal Matching Pursuit (OMP) [2], [5], ha ve been widely adopted for this purpose. While LASSO provides a global conv ex optimization framework of the whole sparse vector with ℓ 1 -norm regularization, its computational demands are often prohibitiv e for real-time applications. Con versely , OMP offers a high-speed greedy alternati ve, selecting sources sequentially based on the correlation between the sensing features and the signal residual. Recently , Sparse Bayesian Learning (SBL) has emer ged as a preferred framework for CS-based channel modeling [1], [3], [6], [7] due to its superior ability to handle highly correlated sensing matrices—a common characteristic of dense wireless environments. By imposing a hierarchical prior on the source hyperparameters, SBL provides rob ust uncertainty quantification and better pruning capabilities. Howe ver , the computational comple xity of standard SBL, typically denoted as O ( M 2 N I ) (where M is the number of measurements, N is the number of potential sources, and I is the number of iterations), grows rapidly as the search grid expands [6]. Furthermore, while se veral SBL v ariants aim to mitigate this computational o verhead [1], [3], [7]–[9], their performance is largely validated on synthetic datasets where pruning is rela- tiv ely easier . In real-world scenarios with measurement noise and propagation model mismatch, standard SBL frequently struggles to con ver ge to a sufficiently sparse support set. T o address these challenges, we propose a novel greedy pursuit strate gy that adopts a bottom-up approach to source selection. While conceptually similar to OMP , our method replaces the simple correlation-based selection with a localized “Micro-SBL ” architecture. For each candidate location, we ex ecute a single-source SBL loop to iterati vely calculate the posterior po wer distrib ution. The source that achiev es the minimum L 2 residual error is selected and added to the support set. This process is repeated for N SBL iterations on the signal residual, where N SBL denotes the desired number of virtual sources (sparsity le vel). This hybrid frame work maintains the speed of greedy pursuits while le veraging the robust estimation power of Bayesian inference. The primary contrib utions of this work are summarized as follo ws: • W e introduce GS-SBL (Greedy Sequential SBL), a nov el and efficient framework for CS recov ery . This framework reduces SBL complexity by decoupling the simultaneous hyperparameter estimation for N potential sources into N single-source Bayesian optimization problems. • W e propose a simple yet effecti ve refinement strategy for the posterior mean powers of the N SBL sources, as provided by the “Micro-SBL” architectures. This strategy av oids solving least squares for the N SBL sources. • W e outline a computationally efficient Bayesian-powered GS-SBL, less complex or comparable to the non- Bayesian greedy OMP . While correlation-based selection in OMP is rapid, its requirement for repeated least- squares solutions for power estimation becomes compu- tationally extensi ve as the support set gro ws. • W e show that GS-SBL outperforms OMP and generalizes better to test datasets, particularly when the test datasets are offset by 20 m from the training measurements, using experimental 3D propagation data. I I . S Y S T E M P R E L I M I NA R I E S A. 3D Radio Pr opagation Model W e consider a 3D spatial region of interest discretized into a grid of N voxels, where N = N x × N y × N z . Each vox el represents a potential virtual signal source location. Let y ∈ R M × 1 denote the vector of received signal strength (RSS) measurements in W atts, collected at M distinct sampling locations, where typically M ≪ N . The relationship between the observed signals and the source powers x ∈ R N × 1 is modeled as a linear system as follows: y = Φx + ϵ, (1) where Φ ∈ R M × N is the sensing matrix. The ( i, j ) -th element of Φ , representing the path loss from the j -th virtual source to the i -th measurement point, is governed by the Free-Space Path Loss (FSPL) model as follo ws: Φ i,j = G t G r λ 4 π d i,j 2 , (2) where G t and G r are antenna corresponding gains, λ is the wa velength, and d i,j is the 3D Euclidean distance between the i -th sensor and j -th vox el. The term ϵ represents additi ve white Gaussian noise (A WGN) following a normal distrib ution p ( ϵ ) ∼ N (0 , σ 2 0 I ) , where the noise v ariance is defined by the precision parameter β as σ 2 0 = β − 1 . B. Sparse Bayesian Learning (SBL) In the SBL framework, sparsity is enforced by assuming a hierarchical prior on the source power vector x . W e assume each coef ficient x i follows a zero-mean Gaussian distribution: p ( x i | α i ) = N ( x i | 0 , α − 1 i ) , (3) where α = [ α 1 , . . . , α N ] T is a v ector of precision hyperpa- rameters. T o further promote sparsity , a Gamma distrib ution prior is imposed on α giv en by: p ( α i ; a, b ) = Γ( α i | a, b ) = b a Γ( a ) α a − 1 i exp( − bα i ) , (4) where a and b are small hyperparameters (typically a, b → 0 ). Giv en the observed data y and fixed hyperparameters, the pos- terior distribution of the sources p ( x | y , α , β ) is also Gaussian, N ( x | µ , Σ ) , with the mean and cov ariance defined as: Σ = ( β Φ T Φ + A ) − 1 , µ = β ΣΦ T y , (5) where A = diag ( α 1 , . . . , α N ) . The recovery process then proceeds by iteratively updating the hyperparameters α and β , which in turn refine the posterior estimates µ and Σ [3]. This cycle repeats until con ver gence or until a maximum number of iterations I is reached. I I I . P RO P O S E D G S - S B L M E T H O D O L O G Y A. Pr oblem F ormulation The objecti ve is to identify a sparse support set of size N SBL , representing the most significant virtual signal sources in the 3D en vironment. Let I = { i 1 , i 2 , . . . , i N SBL } denote the indices of the selected sources where i k ∈ { 1 , . . . , N } , and let p = [ p 1 , p 2 , . . . , p N SBL ] T be their corresponding estimated po wers. The reconstructed signal at the measurement locations, ˆ y , is modeled as the linear superposition of the contrib utions from these selected sources as follows: ˆ y = N SBL X j =1 ϕ i j p j , (6) where ϕ i j denotes the i j -th column of the sensing matrix Φ . The reconstruction task is formulated as a joint optimization problem to minimize the L 2 residual error giv en by: {I ∗ , p ∗ } = arg min I , p ∥ y − N SBL X j =1 ϕ i j p j ∥ 2 2 . (7) B. Greedy Sequential Sour ce Identification T o solve the optimization problem efficiently , we propose a greedy pursuit strategy that identifies sources sequentially . For the k -th source ( k = 1 , . . . , N SBL ), we first compute the residual signal y ( k ) res from the previous stage as follows: y ( k ) res = max 0 , y − k − 1 X j =1 ϕ i j p j , (8) where the max(0 , · ) operator ensures that the residual remains non-negati ve. This aligns with the physical constraint that source powers and their resulting contributions to the receiv ed signal strength must be positive, pre venting the algorithm from being misled by negati ve numerical artifacts in the residual. For the initial step ( k = 1 ), the residual is simply y (1) res = y . For each candidate source j ∈ { 1 , . . . , N } , we initialize a “Micro-SBL ” architecture using the j -th column ϕ j . The hyperparameters are initialized with typical non-sensitiv e v al- ues: α j = 0 , β j = 10 3 , and a = b = 0 . 05 . Because the problem is reduced to a single-source optimization, the SBL loop con verges rapidly; we employ a fixed iteration limit I = 10 . After the Micro-SBL con verges for all N candidates independently , we obtain the posterior mean µ j for each candidate using (5) and calculate the L 2 residual error as follows: E j = ∥ y ( k ) res − µ j ϕ j ∥ 2 2 . (9) The k -th source index i k and its preliminary po wer p k are then selected as follows: i k = arg min j E j , p k = µ i k . (10) C. P ower Refinement and Bias Compensation The sequential identification process ensures that each added source reduces the global residual error . Ho wever , because the powers are estimated independently in each Micro- SBL loop rather than simultaneously , the vector p may con- tain a cumulati ve estimation bias. T o maintain computational efficienc y and a void the comple xity of a full Least Squares (LS) optimization over N SBL sources, we propose a scalar refinement strategy . W e define the unbiased po wer vector as p unbiased = ρ p , where ρ ∈ (0 , 1] is a scaling factor that preserves the power ratios between the identified sources. The optimal scalar ρ ∗ is determined by solving a one-dimensional LS problem as follows: ρ ∗ = arg min ρ ∥ y − ρ N SBL X j =1 ϕ i j p j ∥ 2 2 (11) This refinement ensures the global signal lev el is correctly calibrated while significantly reducing the total computational footprint compared to standard SBL or multi-variable LS. I V . E X P E R I M E N T A L R E S U LT S A N D A N A L Y S I S A. 3D wireless Pr opagation Dataset The GS-SBL framework is e valuated against a pub- licly av ailable empirical U A V -based reference signal received 1 2 3 4 5 6 7 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11 FSPL, 30 m GS-SBL, 30 m* FSPL, 50 m GS-SBL, 50 m FSPL, 70 m GS-SBL, 70 m FSPL, 90 m GS-SBL, 90 m FSPL, 110 m GS-SBL, 110 m* Fig. 2: Impact of the number of virtual sources N SBL on GS-SBL performance, measured in RMSE, across fi ve mea- surement altitudes. T raining altitudes (30 m and 110 m) are indicated by an asterisk (*) in the legend. power (RSRP) dataset [10]. The e xperimental setup for this dataset inv olved a fixed base station (BS) with a 10 m antenna height serving as the transmitter , which operated at a center frequency of 3.5 GHz and a 1.4 MHz bandwidth. Measure- ments were recorded via a U A V follo wing zigzag flight pat- terns at fi ve distinct altitudes, starting at 30 m and increasing by 20 m up to 110 m. The available RSRP distrib utions at the 30 m and 110 m altitudes are illustrated in Fig. 1. B. P erformance Analysis and Sour ce Localization T o determine the optimal number of virtual sources required to characterize the 3D en vironment, we e valuate the recon- struction performance for N SBL values ranging from 1 to 7. As illustrated in Fig. 2, the root mean square error (RMSE) significantly decreases as N SBL increases from 1 to 2, after which the error reduction saturates. This suggests that two virtual sources are sufficient to capture the dominant prop- agation characteristics of this scenario. While the GS-SBL framew ork was trained using measurements from 30 m and 110 m altitudes, it consistently outperforms the FSPL baseline across all test altitudes (50 m, 70 m, and 90 m), demonstrating robust predicti ve capabilities at unsampled ele vations. T o interpret these results physically , we analyze the relation- ship between 3D distance and RSRP , as sho wn in Fig. 3. By examining RSRP peaks that de viate from the a verage FSPL trend—most notably at the 90 m altitude—we can infer the presence of the secondary virtual source. The GS-SBL frame- work identifies this source’ s spatial coordinates by minimizing the global L 2 residual, placing it at a location that accounts for the observed constructive interference and high-signal variance in the empirical data at higher altitudes. Finally , we assess the ef fectiveness of GS-SBL relative to existing CS techniques. While LASSO pro vides a conv ex optimization alternativ e, its high computational complexity 100 200 300 400 500 3D Distance [m] -110 -100 -90 -80 -70 -60 -50 RSRP [dB] FSPL RMSE 9.76 dB GS-SBL RMSE 7.25 dB Measured GS-SBL FSPL (a) 50 m 100 200 300 400 500 3D Distance [m] -110 -100 -90 -80 -70 -60 -50 RSRP [dB] FSPL RMSE 7.40 dB GS-SBL RMSE 6.70 dB Measured GS-SBL FSPL (b) 70 m 100 200 300 400 500 3D Distance [m] -110 -100 -90 -80 -70 -60 -50 RSRP [dB] FSPL RMSE 8.01 dB GS-SBL RMSE 7.13 dB Measured GS-SBL FSPL (c) 90 m 100 200 300 400 500 3D Distance [m] -110 -100 -90 -80 -70 -60 -50 RSRP [dB] FSPL RMSE 8.17 dB GS-SBL RMSE 7.20 dB Measured GS-SBL FSPL (d) 110 m* Fig. 3: Measured RSRP versus 3D distance compared with FSPL and the GS-SBL predictions at four altitudes. The training altitude for GS-SBL is marked with an asterisk (*). 0* 0* 10 10 20 20 7 8 9 10 11 FSPL OMP GS-SBL Fig. 4: RMSE of the proposed GS-SBL, OMP , and FSPL under training-test ele v ation separations of { 0 , 10 , 20 } m. An asterisk (*) on the X-axis indicates performance on the training set (0 m), while the rest represent the model’ s generalization performance on unseen test altitudes. makes it impractical for real-time 3D REM construction. Consequently , we compare our framework against OMP , a standard non-Bayesian greedy pursuit algorithm. Fig. 4 il- lustrates the RMSE for both techniques as a function of the elev ation separation between the training and test sets. At 0 m separation, OMP exhibits slightly lo wer error compared to GS- SBL, likely due to ov erfitting the training noise. Howe ver , as the ele v ation separation increases to 10 m and 20 m, the per - formance of OMP degrades significantly . In contrast, GS-SBL maintains a lo wer and more stable RMSE, indicating that the Bayesian-powered approach achiev es superior generalization by learning the underlying propagation physics rather than localized measurement fluctuations. V . C O N C L U S I O N In this work, we presented GS-SBL, a no vel Greedy Se- quential Sparse Bayesian Learning framework designed for efficient 3D wireless path loss modeling. By introducing a “Micro-SBL ” architecture, we successfully decoupled the high-dimensional hyperparameter estimation of standard SBL into multiple single-source optimization problems. This ap- proach bridges the gap between the computational speed of greedy pursuits and the robust uncertainty quantification of Bayesian inference. V alidated against empirical 3D RSRP datasets from a U A V -based setup, GS-SBL demonstrated a significant performance enhancement. Crucially , our results rev eal that while non-Bayesian methods like OMP tend to ov erfit localized training noise, GS-SBL identifies physically consistent virtual sources, leading to superior generalization capabilities across different altitudes. Future research will focus on expanding the comparativ e analysis to include other advanced SBL variants, such as Clustered or Block-Sparse SBL, to e valuate performance in even more densely cluttered en vironments. Additionally , we intend to inv estigate horizontal spatial separation between training and testing sets to further stress-test the model’ s geographical extrapolation. AC K N OW L E D G E M E N T W e use measurement data published by the NSF Aerial Experimentation and Research Platform on Advanced Wireless (AERP A W) platform. This research is supported in part by the NSF award CNS-2332835 and the INL Laboratory Directed Research Development (LDRD) Program under BMC No. 264247, Release No. 26 on BEA ’ s Prime Contract No. DE- A C07-05ID14517. R E F E R E N C E S [1] J. W ang, Q. Zhu, Z. Lin, Q. W u, Y . Huang, X. Cai, W . Zhong, and Y . Zhao, “Sparse Bayesian learning-based 3-D radio environment map construction—sampling optimization, scenario-dependent dictio- nary construction, and sparse recovery , ” IEEE T rans. Cognitive Commun. Netw . , vol. 10, no. 1, pp. 80–93, 2023. [2] F . Shen, Z. W ang, G. Ding, K. Li, and Q. Wu, “3D compressed spectrum mapping with sampling locations optimization in spectrum- heterogeneous en vironment, ” IEEE Tr ans. W ireless Commun. , vol. 21, no. 1, pp. 326–338, 2021. [3] J. W ang, Q. Zhu, Z. Lin, J. Chen, G. Ding, Q. W u, G. Gu, and Q. Gao, “Sparse bayesian learning-based hierarchical construction for 3D radio en vironment maps incorporating channel shado wing, ” IEEE T rans. W ireless Commun. , vol. 23, no. 10, pp. 14 560–14 574, 2024. [4] J. A. Bazerque, G. Mateos, and G. B. Giannakis, “Group-Lasso on splines for spectrum cartography , ” IEEE T rans. Sig . Pr oc. , vol. 59, no. 10, pp. 4648–4663, 2011. [5] J. Lee, G.-T . Gil, and Y . H. Lee, “Channel estimation via orthogonal matching pursuit for hybrid mimo systems in millimeter wav e commu- nications, ” IEEE T rans. Commun. , vol. 64, no. 6, pp. 2370–2386, 2016. [6] M. E. Tipping and A. C. Faul, “Fast marginal likelihood maximisation for sparse Bayesian models, ” in Pr oc. Int. W orkshop on Artificial Intell. Stats. , Ke y W est, FL, Jan. 2003, pp. 276–283. [7] M. U. Aminu, M. Codreanu, and M. Juntti, “Bayesian learning based millimeter-wa ve sparse channel estimation with hybrid antenna array , ” in Pr oc. IEEE Int. W orkshop Sig. Pr oc. Advances in Wir eless Commun. (SP A WC) , Kalamata, Greece, Jun. 2018, pp. 1–5. [8] Y . Zou, H. Ding, and J. Li, “T wo-stage sparse Bayesian learning algorithm for multi-target localization in MIMO-FMCW radar, ” in Proc. IEEE Int. Conf . Intell. Comput. W ireless Optical Commun. (ICWOC) , Chengdu, China, Jun. 2025, pp. 128–132. [9] R. R. Pote and B. D. Rao, “Light-weight sequential SBL algorithm: An alternativ e to OMP, ” in Proc. IEEE Int. Conf. Acoust., Speech, Sig. Pr oc. (ICASSP) , Rhodes Island, Greece, Jun. 2023, pp. 1–5. [10] S. J. Maeng, O. Ozdemir , I. Guvenc, M. Sichitiu, and R. Dutta, “L TE I/Q measurement by AERP A W platform for air-to-ground propagation modeling, ” IEEE Dataport, 2022. [Online]. A vailable: https://dx.doi.org/10.21227/0p43- 0d72
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment