Superintegrability and choreographic obstructions in dihedral $n$-body Hamiltonian systems
In this study $n$-body systems on the plane, invariant under the dihedral group $D_n$, with quadratic pairwise interactions are considered. In the center-of-mass frame the dynamics separates into Fourier normal modes. Although suitable couplings can …
Authors: Adrian M Escobar-Ruiz, Manuel Fern, ez-Guasti
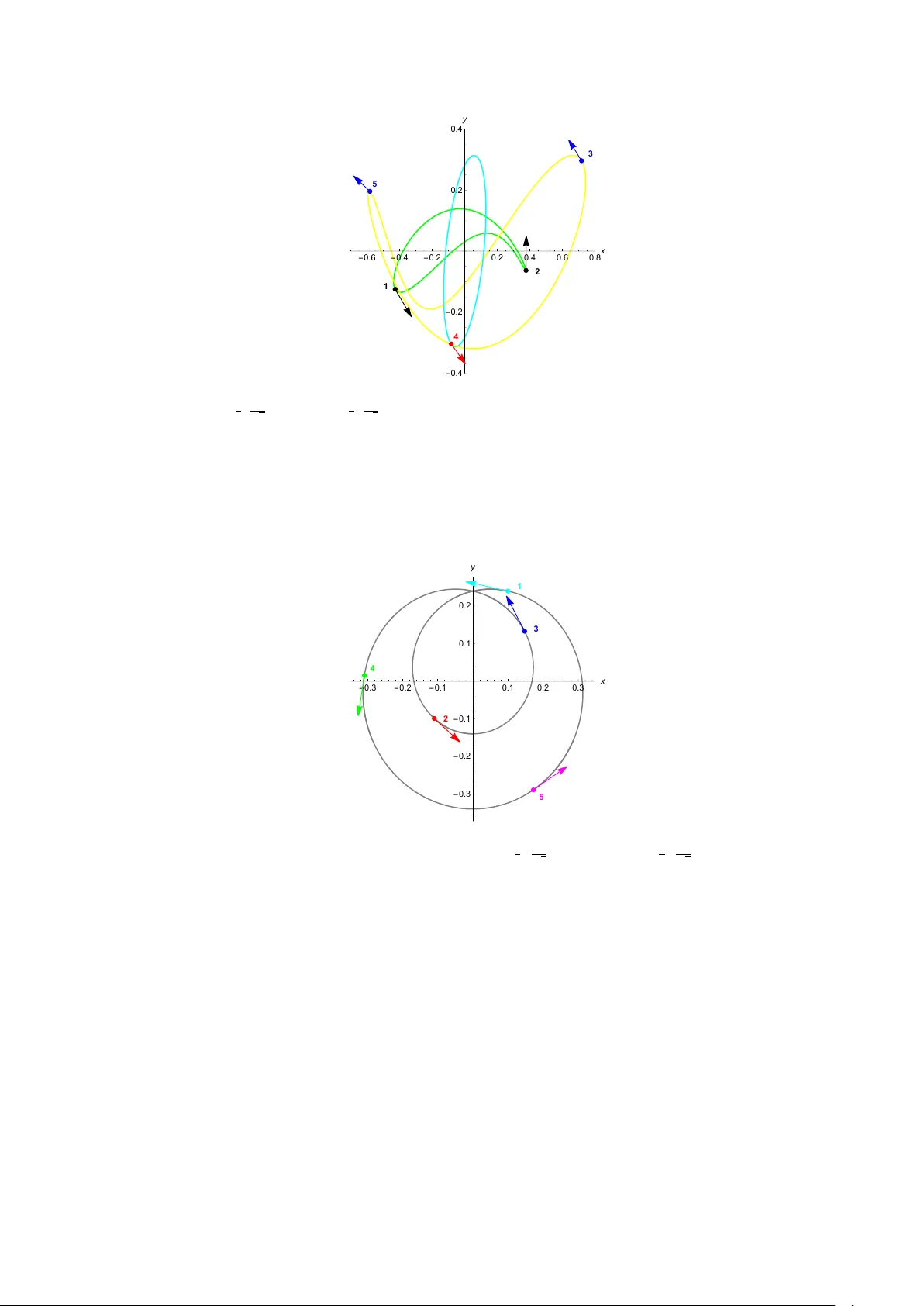
Sup erin tegrabilit y and c horeographic obstructions in dihedral n -b o dy Hamiltonian systems Adrian M Escobar-Ruiz 1* and Man uel F ernandez-Guasti 1 1* Departamen to de F ´ ısica, Universidad Aut´ onoma Metrop olitana - Iztapalapa, Rafael Atlixco 186, CDMX, 09340, Ciudad de M´ exico, M ´ exico. *Corresp onding author(s). E-mail(s): admau@xanum.uam.mx ; Con tributing authors: mfg@xan um.uam.mx ; Abstract In this study n -b ody systems on the plane, inv arian t under the dihedral group D n , with quadratic pairwise in teractions are considered. In the cen ter-of-mass frame the dynamics separates in to F ourier normal mo des. Although suitable cou- plings can mak e the system maximally superintegrable (so all b ounded motions are p eriodic), resonance of the mo de frequencies do es not by itself ensure c horeographic motion. W e giv e an explicit criterion for c horeographic symmetry of a T -p eriodic solution: in v ariance under the c horeograph y generator (time shift T /n combined with cyclic relab eling/rotation) holds if and only if every dynamically activ e F ourier sector satisfies a sectorwise phase condition. This yields a direct test for when a closed orbit can b e realized as a single-trace n –b o dy c horeography . When several symmetry-distinct mo de families are sim ultaneously excited, p eri- o dic motions are generically not single-trace; for generic sup erin tegrable initial data the particles lie on distinct closed curves, producing multi-trac e motion. In sp ecial cases this m ulti-trace structure organizes into sub–choreographies sup- p orted on distinct traces; w e refer to this structured splitting as chor e o gr aphic fr agmentation . The cases n = 4 , 5 , 6 are analyzed explicitly . In particular, for n = 6 the maximally superintegrable resonance 1:2:3 yields p eriodic but gener- ically m ulti-trace dynamics, whereas a single-trace six-b ody choreograph y o ccurs only at the degenerate resonance 1:2:2 . Keyw ords: n -b ody system, c horeography , Hamiltonian system, superintegrabilit y , dynamical fragmen tation, first in tegrals, separation of v ariables, dihedral group. 1 1 In tro duction Choreographic solutions of the n -b ody problem—p eriodic motions in whic h n identi- cal particles trav erse the same closed curve with uniform time dela ys—hav e b ecome cen tral ob jects in modern dynamical-systems theory [ 1 – 10 ]. They provide a sharp lab oratory for collectiv e sync hronization in Hamiltonian dynamics: a discrete symme- try prescrib es how the particles must b e p erm uted, while the dynamics fixes which temp oral phase relations are ev en av ailable. In nonin tegrable settings—most notably the gravitational n -b o dy problem—choreographies are typically pro duced through v ariational[ 2 , 7 , 11 , 12 ] and top ological[ 1 , 3 , 13 , 14 ] mechanisms, and are therefore kno wn primarily through implicit constructions or numerical con tinuation rather than explicit analytic normal forms [ 15 ]. Related finiteness and structural constrain ts for sp ecial symmetric configurations hav e b een analyzed from v ariational and algebraic viewp oin ts in [ 16 ]. F rom the ph ysical p ersp ectiv e, these examples suggest a general principle: choreograph y is not merely “closed motion” but a mo de-lo cke d synchr oniza- tion b etw een symmetry and time evolution, sensitive to resonant structure and to how the degrees of freedom transform under the symmetry group [ 7 , 8 , 17 , 18 ]. Throughout this w ork, an n -b o dy chor e o gr aphy means that all particle p ositions r i ( t ) ∈ R 2 follo w the same closed curv e γ ( t ) with uniform time shifts, r j ( t ) = r 1 t + j − 1 n T , j = 1 , . . . , n, T > 0 , without requiring γ itself to possess n -fold geometric symmetry . Equiv alen tly , in con- figuration space the motion is in v ariant under the generator of C n , i.e. under the com bined action of a time shift by T /n and the cyclic relabeling of the particles. T erminology . In this study , chor e o gr aphy is used in the standard geometric sense: there exist T > 0 and a single closed curve γ ( t ) such that r i ( t ) = γ t + ( i − 1) T n for i = 1 , . . . , n . By contrast, C n -e quivarianc e refers only to in v ariance under the c horeography generator (time shift T /n combined with cyclic relab eling/rotation), as c haracterized by Theorem 2 . C n -equiv ariance do es not by itself guarantee a single trace: when sev eral inequiv alen t D n sectors are sim ultaneously active, the motion ma y b e C n -equiv arian t yet non-choreographic, with the particles lying on m ultiple closed curv es. A sub-chor e o gr aphy is a subset of particles whose tra jectories form a choreograph y among themselv es (p ossibly on a curve different from other subsets). W e refer to chor e o gr aphic fr agmentation as a C n -equiv arian t p erio dic motion that splits into t wo or more sub-c horeographies supported on distinct closed curves. More general p eriodic motions with multiple traces without such a decomp osition in to sub-c horeographies will b e called multi-tr ac e motions. When w e state that a choreographic resonance is unique, this is understo od up to in teger time rescaling t 7→ mt (equiv alen tly T 7→ T /m ), i.e. uniqueness of the primitive resonance class obtained after dividing the frequency vector by the greatest common divisor of its in teger ratios. 2 The present pap er studies a class of analytically transparent mo dels in whic h the ab o v e sync hronization mec hanism can b e made completely explicit. W e consider pla- nar n -b ody systems with pairwise quadratic interactions V = V ( | r i − r j | 2 ) whose index c ouplings are inv arian t under the dihedral group D n (edges and diagonals of the abstract n -gon). Here D n –in v ariance refers to the symmetry of the interaction pattern on labeled particles and not to the instantaneous geometric shape of the configuration. Because the dynamics is linear in relative co ordinates, the in ternal motion admits an exact discrete-F ourier normal-mo de decomp osition; the normal mo des organize in to irreducible D n sectors and ev olve as uncoupled oscillators with frequencies Ω ℓ . (F or the structure and characters of irreducible represen tations of the dihedral group, see e.g. [ 19 – 21 ].) In suc h quadratic D n -in v ariant systems, p erio dicit y has a familiar ph ysical origin: it arises when the normal-mo de frequencies are commensurate. What is less obvious— and is the main theme of this work—is that commensurability alone do es not guarantee an n -b ody choreograph y . The reason is not algebraic but representation-theoretic. A c horeography requires the dynamics to realize the cyclic symmetry through a c om- bine d space-time op eration: in v ariance under a time shift by T /n together with the cyclic generator of C n (and, in a planar realization, a rotation by 2 π /n ). In mo de language, this is a phase-lo cking constraint: eac h dynamically active F ourier sector m ust acquire, under the time shift T /n , precisely the character phase dictated by its C n lab el. When several inequiv alent dihedral sectors are simultaneously excited, their c haracters are generically incompatible with a single common time shift. When a syn- c hronized remnan t surviv es, the resulting p erio dic motion typically loses (except at n = 4) a common trace and b ecomes multi-tr ac e . In sp ecial cases, this m ulti-trace structure organizes into synchronized subsets of particles, each subset trav ersing a common closed curve with uniform time shifts (a sub-chor e o gr aphy ). When such sub- c horeographies are supported on distinct closed curves, we call the resulting splitting chor e o gr aphic fr agmentation : a putativ e choreograph y breaks in to sub-choreographies on different tra jectories. Inspired by the four-bo dy lima¸ con c horeography and the associated chor e o gr aphic fr agmentation observ ed in a maximally sup erin tegrable quadratic mo del [ 22 ], w e iden tify the mechanism controlling choreographic symmetry in cyclically symmetric n -b ody systems. W e show that C n -equiv ariance requires a sectorwise phase-matching condition in the F ourier decomposition; when it fails, p erio dic motions generically split in to fragmen ted m ulti-trace dynamics. This criterion explains the four-b ody b eha v- ior and predicts fragmen tation patterns for arbitrary n , with frequency degeneracies pro viding a route to genuine single-trace choreographies. Wh y quadratic D n mo dels? The underlying rationale is that they combine three structural features that let one separate, in a controlled setting, close d motion from chor e o gr aphic synchr onization : • Exact separabilit y: the Hamiltonian is integrable and can alwa ys b e diagonal- ized by a discrete F ourier transform, reducing the relative dynamics to a collection of uncoupled harmonic oscillators with frequencies Ω i , each asso ciated with an irreducible representation of D n . 3 • Maximal sup erin tegrability: for suitable rational relations among the normal- mo de frequencies Ω i , the system p ossesses the maximal n umber 2 n − 1 of in tegrals of motion and all b ounded tra jectories are closed and explicitly solv able [ 23 – 26 ]. • Choreographic solutions (and their obstructions): Maximal sup erin tegrabil- it y does not, in general, guarantee the existence of an n -b ody c horeography . The obstruction is represen tation-theoretic. Choreographic symmetry requires a mode- b y-mo de phase-matching condition: for each dynamically active F ourier sector ℓ , the time shift τ n := T /n must satisfy e i Ω ℓ τ n = e 2 π iℓ/n , so that the motion is inv ariant under the combined action of a time shift b y T /n and the generator of the cyclic p erm utation/rotation by 2 π /n . Equiv alen tly , all activ e sectors must b e simultaneously compatible with their C n c haracters (as enco ded by the F ourier lab els ℓ ) for a single common p erio d T . When several inequiv alen t D n sectors are sim ultaneously excited, this compatibilit y t ypically fails; and ev en when it holds, the resulting p eriodic motion may exhibit choreographic fragmentation in the sense ab ov e. A t a heuristic level one migh t expect maximal sup erin tegrabilit y to fa vor c hore- ographic motion: a complete set of integrals forces all b ounded tra jectories to b e closed and seems to promote strong temp oral regularity . The present work mak es precise, ho wev er, that choreograph y is a str onger requirement: it is a sp ecific symme- try realization, not merely closure. In particular, we distinguish algebr aic r esonanc es (rational relations among normal-mode frequencies) from chor e o gr aphic r esonanc es , whic h additionally require C n –equiv ariance through the phase-matc hing condition of Theorem 2 . This group-theoretical p ersp ectiv e complements recent work [ 22 ] relating c horeographies to the notion of additional p articular integrals of motion [ 27 , 28 ]. It is also imp ortant to distinguish our forw ard, symmetry-constrained viewpoint from the inv erse-design framew ork of [ 29 ]. In that approac h one prescrib es a choreo- graphic curv e of p -lima¸ con type and then constructs families of couplings κ ( n ) s realizing the prescribed motion. By contrast, here the couplings κ ( n ) s are fixed a priori b y the imp osed D n symmetry but are otherwise completely general. The normal-mo de con- ten t is therefore not adjusted to fit a c hosen tra jectory; rather, it determines which c horeographies can arise. In particular, the choreographies in [ 29 ] corresp ond to a sp ecial class of the presen t solutions in whic h all but tw o F ourier sectors are set to zero. The cases n = 4 and n = 5 already illustrate the rigidit y imp osed by dihedral symmetry . F or these v alues of n , the D n -in v ariant quadratic p oten tial admits only tw o indep enden t coupling families, and the corresponding c horeographies reduce—up to symmetry—to deformations of the classical lima¸ con curve [ 22 , 29 , 30 ]. The first genuinely new qualitativ e behaviour app ears at n = 6. Here dihedral sym- metry allows three indep enden t coupling families, and the internal dynamics inv olves three distinct frequency branches. Although the system remains exactly solv able for all coupling choices, three-frequency synchronization is highly restrictiv e. W e sho w 4 that the only single-tr ac e six-b o dy choreograph y compatible with the D 6 represen- tation structure o ccurs when Ω 1 : Ω 2 : Ω 3 = 1 : 2 : 2, the unique triple resonance in which the nondegenerate Nyquist branch (the alternating ℓ = 3 mo de) lo c ks onto one of the tw o-dimensional symmetry doublets. Under this degeneracy the symmetry sectors recombine into a single C 6 -equiv arian t dynamical mo de, yielding an analytic six-b ody choreograph y on a trisectrix lima¸ con. No other triple resonance—including the maximally sup erin tegrable algebraic pat- tern 1:2:3—satisfies the equiv ariance requiremen t when all three symmetry sectors are sim ultaneously excited. Outside the 1:2:2 case, the Nyquist mo de do es not transform within the same t wo-dimensional D 6 represen tation as the low er doublets, and a six- b ody choreograph y is imp ossible. This rigidity is sp ecific to the forward D 6 mo del; in the in verse p -lima¸ con construction [ 29 ], the obstruction can b e bypassed by suppressing en tire symmetry sectors. The six-b ody system nevertheless admits simpler choreographies when the motion is confined to inv arian t linear subspaces of the full phase space, obtained by imp osing suitable linear relations on the initial data. In such reductions only tw o of the three normal-mo de sectors are excited, so the dynamics inv olves only t wo frequencies. In this setting the representation-theoretic obstruction—namely the sim ultaneous activ ation of inequiv alent D 6 irreducible comp onen ts—is av oided, and gen uine tw o-frequency c horeographies with frequency ratios 1:2 or 1:3 can o ccur, even though the full three- frequency sp ectrum exhibits the non-c horeographic resonance pattern 1:2:3. These solutions co exist with the fully resonant 1:2:2 lima¸ con c horeography , but they liv e on lo wer-dimensional in v ariant manifolds of the linear dynamics. They should b e distinguished from the fr agmentation phenomenon discussed later: under our defini- tion, fragmentation refers to the splitting of a putative choreograph y into synchronized sub–c horeographies supp orted on distinct closed curves, whic h can o ccur when several symmetry sectors are sim ultaneously excited. Hierarc hy of notions and logic chain. — F or the motions considered here one has p eriodic ⊃ C n –equiv arian t ⊃ single–trace n -bo dy choreograph y . Commensurabilit y ⇒ p eriodicity; phase matching (Theorem 2 ) ⇒ C n -equiv ariance; a single geometric trace ⇒ choreograph y; and failure of a common trace ⇒ multi-tr ac e motion. When this multi-trace structure organizes into sub-choreographies supp orted on distinct closed curv es, we call the resulting splitting chor e o gr aphic fr agmentation . Th us choreographic solutions are necessarily C n -equiv arian t, whereas the conv erse holds only in sp ecial low- n cases. F or n = 4 (and lik ewise for n = 5 in the presen t quadratic dihedral family) the activ e internal mo des form a single effective symmetry sector, so that C n -equiv ariance already enforces a unique geometric trace. F or n ≥ 6, sev eral inequiv alent D n sectors ma y b e sim ultaneously active, and a motion can satisfy the global C n phase-matc hing condition while, for generic initial data, losing a common trace and b ecoming multi-trace; in special cases this multi-trace motion fragments in to sub-c horeographies on distinct closed curves. 5 Main result and contributions. F or quadratic D n -in v ariant n -bo dy syste ms, com- mensurabilit y of the normal-mo de frequencies is necessary but not sufficien t for c horeographic motion: normal-mode diagonalization determines perio dicity , but not whether the cyclic symmetry can b e realized by a single c ommon time shift across all dynamically active D n irreducible sectors. A T -perio dic solution can b e a (single–trace) c horeography only if it is C n -equiv arian t, and a p erio dic solution is C n -equiv arian t if and only if its active F ourier sectors satisfy the sectorwise phase-matc hing conditions of Theorem 2 . Equiv alently , for a single common p erio d T , the dynamical phase accu- m ulated o ver the shift T /n m ust match, sector by sector, the phase imp osed by the cyclic action. This criterion isolates a representation-theoretic obstruction that is invisible to commensurabilit y and sup erin tegrability , and it explains a generic mechanism for the failure of single-trace motion. Commensurate frequencies can yield p eriodic motions that are not C n -equiv arian t, hence cannot b e choreographies. Moreov er, even when C n -equiv ariance holds, sim ultaneous excitation of mo des from inequiv alen t D n sectors can destro y a common trace and produce m ulti-trace perio dic motion. In sp ecial cases, this multi-trace structure organizes in to synchronized subsets with reduced time-shift symmetry , eac h subset tra versing its own closed curve; when these curves are distinct w e refer to the resulting splitting as chor e o gr aphic fr agmentation . This mechanism explains the existence and absence of c horeographies for n = 4 , 5 , 6 and extends uni- formly to all n > 6; a schematic summary app ears in T able 1 . In particular, it yields a classification of planar quadratic D n c horeographies in terms of mo de selection, phase matc hing, and fragmentation. The first instance where C n -equiv ariance is not sufficient for a single geometric trace o ccurs at n = 6: the fully resonant sp ectrum Ω 1 : Ω 2 : Ω 3 = 1 : 2 : 3 can satisfy the phase-matching conditions of Theorem 2 and hence b e C 6 -equiv arian t, y et for generic initial data it becomes multi-trace; in sp ecial cases it fragments into sub- c horeographies, whereas a gen uine six-b ody c horeography arises only at the degenerate lo c king Ω 1 : Ω 2 : Ω 3 = 1 : 2 : 2. It is worth emphasizing that, dep ending on the coupling parameters, a quadratic D n -in v ariant system ma y admit no chor e o gr aphic solutions at al l . F or generic couplings the normal-mo de frequencies p opulate several sectors and are t ypically incommensurate, leading to quasip erio dic dynamics in the full phase space. Rational commensurabilit y is therefore necessary but not sufficient: when the represen tation- theoretic equiv ariance condition fails, perio dic motions may p ersist (for instance on resonan t manifolds or in v arian t subspaces), but choreographic symmetry is lost. When equiv ariance holds but sev eral inequiv alen t sectors are active, the motion is typically sync hronized but may fragment into sub–c horeographies rather than forming a single trace. Sp ecifically , we deriv e a sectorwise phase-matc hing criterion for C n -equiv ariance (Theorem 2 ) and sho w that multi-sector excitation generically leads to multi-trace, non-c horeographic motion (and in sp ecial cases to choreographic fragmen tation), with n = 6 as the first nonrigid case. The pap er is organized as follo ws. Section 2 in tro duces the general symmetry framew ork, fixes terminology , and formulates the C n -equiv ariance (phase-matching) 6 Activ e sectors F requency rela- tions D n con tent Resulting motion Single sector (or effec- tively single) One frequency One 2D doublet (or an effective 2D sector via degeneracy) C n -equiv ariant; choreogra- phy (single trace) Multiple inequiv alent sectors Commensurate Inequiv alent D n irreps Periodic; C n -equiv ariant iff Theorem 2 holds; generi- cally multi-trace; fragmen- tation in structured cases Multiple inequiv alent sectors Incommensurate Inequiv alent D n irreps Quasiperio dic (non-closed) motion Multiple sectors (any) Commensurate arbitrary If phase matc hing fails: perio dic but not C n - equiv ariant (hence not a choreograph y) T able 1 Schematic classification of motions in quadratic D n -inv ariant n -b ody systems. Commensurability controls p eriodicity , while C n -equiv ariance is characterized b y the sectorwise phase-matching constraints of Theorem 2 . Even when C n -equiv ariance holds, simultaneous excitation of inequiv alent sectors is generically multi-trace; we reserve chor e o gr aphic fr agmentation for the structured case where the particles split into synchronized subsets (sub-choreographies) supp orted on distinct closed curves. criterion for p eriodic motions in quadratic D n -in v ariant systems. Section 4 then presen ts the low– n illustrations n = 4 and n = 5, where the phase-matc hing condi- tion already enforces a unique primitiv e 1 : 2 choreographic resonance in the full phase space (with tec hnical deriv ations deferred to the app endices). The first genuinely new phenomenon app ears in Section 5 , which analyzes the six-bo dy problem: here three inequiv alen t symmetry sectors co exist, and algebraic sup erin tegrabilit y and ev en C 6 - equiv ariance no longer guaran tee a single-trace c horeography; the exceptional six-b o dy c horeography arises only at the degenerate resonance 1 : 2 : 2. Section 6 isolates the resulting mechanism and provides a unified representation-theoretic in terpretation of c horeographic fragmentation. Section 7 extends the classification to arbitrary n > 6. Finally , conclusions and outlo ok are presen ted in Section 8 . 2 D n -in v arian t Hamiltonian and the phase-matc hing criterion This section formulates the general symmetry-theoretic framew ork underlying c hore- ographic motion in quadratic D n -in v ariant n -b ody systems. W e fix terminology , describ e the normal-mo de decomp osition imposed by dihedral symmetry , and state the central phase-matc hing criterion c haracterizing C n -equiv arian t p erio dic motions. All later examples ( n = 4 , 5 , 6 and n > 6) are direct illustrations of this general mec hanism. 2.1 Choreographies, equiv ariance, and traces Let us consider n identical particles on the plane with vector p ositions r i ( t ) ∈ R 2 , i = 1 , . . . , n . A (single-tr ac e) n -b o dy chor e o gr aphy is a p eriodic motion of perio d T > 0 7 for which there exists a single generating curve γ ( t ) such that r i ( t ) = γ t + ( i − 1) T n , i = 1 , . . . , n. (1) No geometric n -fold symmetry of γ is assumed. Equiv alen tly , the configuration is inv arian t under the generator of the cyclic group C n , realized as the combined action of t 7→ t + T n , i 7→ i + 1 (mo d n ) , together with a planar rotation b y 2 π /n . W e call this property C n -e quivarianc e . It is crucial to distinguish three prop erties: (i) p erio dicity (existence of T such that r ( t + T ) = r ( t )), (ii) C n -e quivarianc e (in v ariance under the combined space-time generators), (iii) single-tr ac e chor e o gr aphy (existence of a single generating curv e). F or n ≥ 6 these notions are no longer equiv alen t: a motion may b e p erio dic and ev en C n -equiv arian t while failing to b e single-trace. 2.2 D n -in v ariant quadratic systems and F ourier sectors W e introduce the n − b ody Hamiltonian of the form H n = 1 2 m n X i =1 p 2 i + 1 2 m ω 2 ⌊ n/ 2 ⌋ X k =1 κ ( n ) k n X i =1 ( r i − r i + k ) 2 , (2) whic h is inv ariant under the dihedral group D n acting on particle labels. Here m is the mass of each individual particle, κ ( n ) k are real parameters that play the role of coupling constants and ω > 0. R emark 1 (Normalization for even n ) F or ev en n , the term with k = n/ 2 corresp onds to opp osite vertices. In the double sum ⌊ n/ 2 ⌋ X k =1 n X i =1 ( r i − r i + k ) 2 , these opp osite bonds are coun ted twice. Throughout the pap er w e adopt this uniform con- v ention for all n . If one instead lists opp osite b onds only once (as is common for n = 4), the corresp onding coupling must b e rescaled by a factor of 2, i.e. κ ( n ) n/ 2 7→ 2 κ ( n ) n/ 2 . W orking in the center-of-mass frame, P i r i = P i p i = 0, the quadratic form diagonalizes under the discrete F ourier transform r i = 1 √ n n − 1 X ℓ =0 U ℓ e 2 π iℓ ( i − 1) /n , U n − ℓ = U ℓ . 8 Eac h F ourier lab el ℓ defines a D n -in v ariant normal-mode sector with frequency Ω ℓ . F or ℓ = 0 , n/ 2 the real dynamics lives in a t wo-dimensional cosine-sine doublet; for ev en n the Nyquist mo de ℓ = n/ 2 is one-dimensional. The internal motion is therefore a superp osition of uncoupled harmonic oscillators, eac h transforming according to a definite irreducible representation of D n . 2.3 Normal–mo de decomp osition Prop osition 1 (Normal–mo de decomposition) Consider the planar quadr atic n -bo dy Hamil- tonian ( 2 ) whose equations of motion ar e invariant under the dihe dr al gr oup D n . Then the line arize d e quations ab out the origin de c omp ose into D n -invariant F ourier sectors indexe d by ℓ ∈ { 0 , 1 , . . . , ⌊ n/ 2 ⌋} . In e ach se ctor ℓ , the dynamics r e duc e to a p air of dec ouple d harmonic oscil lators with a c ommon fr e quency Ω ℓ . Any solution c an ther efor e b e written as a sup erp osition of se ctor al mo des, and the set of active sectors is determine d by the initial data. Pr o of D n -in v ariance forces the linear coupling to b e circulant (up to the planar blo ck struc- ture), hence diagonalizable by the discrete F ourier transform. Each F ourier mo de furnishes an irreducible D n –mo dule, yielding decoupled equations with frequency Ω ℓ . □ 2.4 Phase-matching and C n -equiv ariance Theorem 2 ( C n -equiv ariance (phase-matching) criterion) L et r ( t ) = ( r 1 ( t ) , . . . , r n ( t )) b e a T -p erio dic solution of the quadr atic D n -invariant planar n -b o dy system ( 2 ) . De c omp ose its internal motion into F ourier se ctors r ( t ) = X ℓ ∈ A r ℓ ( t ) , wher e A is the set of dynamic al ly active se ctors (i.e. r ℓ ≡ 0 ). L et U ℓ ( t ) denote the c omplex F ourier c o or dinate in se ctor ℓ with normal-mo de fre quency Ω ℓ > 0 , and define the asso ciate d c omplex phase-sp ac e amplitude a ℓ ( t ) := U ℓ ( t ) + i Ω ℓ ˙ U ℓ ( t ) . Then r ( t ) is C n -e quivariant—that is, invariant under the chor e o gr aphy gener ator given by the c ombine d action of the time shift t 7→ t + T /n and the cyclic r elab eling/r otation gener ator of C n —if and only if, for every ℓ ∈ A , e i Ω ℓ T /n = e 2 π i ℓ/n , e quivalently Ω ℓ T /n ≡ 2 π ℓ/n (mod 2 π ) . (3) Pr o of In sector ℓ , the linearized dynamics is a harmonic oscillator of frequency Ω ℓ . The complex phase-space amplitude a ℓ ( t ) = U ℓ ( t ) + i Ω ℓ ˙ U ℓ ( t ) evolv es as a ℓ ( t + τ ) = e i Ω ℓ τ a ℓ ( t ) for every solution and every τ . 9 The cyclic generator of C n acts on sector ℓ by multiplication b y the character e 2 π iℓ/n . Therefore, inv ariance under the com bined action of the time shift τ = T /n and the cyclic generator holds in every active sector if and only if e i Ω ℓ T /n = e 2 π iℓ/n for all ℓ ∈ A, whic h is precisely ( 3 ). □ W e call a F ourier sector ℓ active if r ℓ ≡ 0, equiv alen tly if its normal-mode amplitude is nonzero for the chosen initial data. R emark 2 (Equiv ariance vs. single-trace choreograph y) The phase-matching condition ( 3 ) c haracterizes C n -e quivarianc e (synchronization of the motion with the cyclic symmetry) and should not b e conflated with the existence of a single-tr ac e c horeography . F or n ≥ 6, a p erio dic solution may satisfy ( 3 ) in all active sectors and still b e generically m ulti-trace when several inequiv alen t D n sectors are simultaneously excited. A gen uine single- trace choreograph y requires that the active motion lie in one effe ctive irreducible sector. This ma y o ccur either b ecause only one sector is active, or because an exact sp e ctr al de gener acy collapses several sectors into a common eigenspace (as in the Ω 2 = Ω 3 lo c king that yields the 1:2:2 resonance at n = 6). In practice, given a quadratic D n -in v ariant system and a candidate p erio dic solution, one pro ceeds as follo ws. (i) Decomp ose the internal motion in to F ourier normal modes and determine the set of active sectors A . (ii) Compute the corresp onding frequencies Ω ℓ and a common p erio d T (which exists precisely when the active frequencies are commensurate). (iii) T est the phase-matching condition ( 3 ) for each ℓ ∈ A : the dynamical phase accum ulated b y the sector amplitude ov er the shift T /n , e i Ω ℓ T /n , m ust coincide with the c haracter phase e 2 π iℓ/n prescrib ed by the C n action. This separates three regimes. If commensurability fails, the motion is not p eriodic and choreograph y is excluded. If commensurability holds but ( 3 ) fails for at least one active sector, the p erio dic solution is not C n –equiv arian t and hence cannot b e a choreograph y . If ( 3 ) holds in all active sectors, the solution is C n –equiv arian t; one m ust then insp ect the active sector conten t. A single effective sector (or an exact degeneracy collapsing several sectors) can yield a single–trace choreograph y , whereas generic simultaneous excitation of inequiv alen t sectors pro duces multi–trace motion, p ossibly organizing in to chor e o gr aphic fr agmentation . Prop osition 3 (Generic obstruction to single–trace under multi-sector excitation) L et r ( t ) b e a T -p erio dic solution exciting at le ast two ine quivalent F ourier se ctors ℓ 1 = ℓ 2 . Assume their c omp onents ar e indep endent, i.e. no exact sp e ctr al de gener acy merges them into a single effe ctive se ctor. Then the single-tr ac e chor e o gr aphy pr op erty imp oses additional algebr aic c on- str aints on the r elative amplitudes and phases of the active se ctors. Conse quently, within the 10 family of multi-se ctor T -perio dic solutions (with the same active se ctor set), the single-tr ac e solutions form a prop er subset of c o dimension ≥ 1 ; henc e multi-tr ac e motion is generic. Pr o of W rite r ( t ) = r ℓ 1 ( t ) + r ℓ 2 ( t ) + · · · . A single-trace choreograph y requires that all particle tra jectories b e obtained from one curve by the common time shift T /n , which forces compat- ibilit y of the sector contributions under this shift. F or inequiv alent sectors with indep enden t eigenspaces, the asso ciated amplitude/phase data are indep enden t, so this compatibility yields nontrivial algebraic relations among them. These relations cut out a prop er subset (co dimension ≥ 1) of the multi-sector p eriodic family , so generic multi-sector excitation pro duces distinct traces. □ 3 Consequences of the phase-matc hing criterion Theorem 4 (Obstruction to C n -equiv ariance (and hence choreograph y)) L et r ( t ) b e a T - p erio dic solution of a quadr atic D n -invariant n -b o dy system, and let A denote the set of dynamic al ly active F ourier se ctors. If the phase-matching c ondition ( 3 ) fails for at le ast one ℓ ∈ A , then r ( t ) is not C n -e quivariant. In p articular, r ( t ) c annot b e a (single-tr ac e) chor e o gr aphy. Pr o of Let g denote the choreograph y generator, i.e. the comp osition of the cyclic relab eling (and corresp onding spatial rotation, if included in the definition of C n ) with the time shift t 7→ t + T /n . By Theorem 2 , r ( t ) is C n -equiv arian t if and only if g · r ( t ) = r ( t ), which holds if and only if the phase-matching condition ( 3 ) is satisfied in every activ e F ourier sector. If ( 3 ) fails for some ℓ ∈ A , then the ℓ -sector comp onent do es not return to itself under the action of g , and hence g · r ( t ) = r ( t ). Therefore r ( t ) is not C n -equiv arian t. Finally , an y (single-trace) c horeography is in particular C n -equiv arian t, so r ( t ) cannot b e a choreograph y . □ 3.1 Sup erin tegrability , p erio dicit y and equiv ariance Sup erin tegrabilit y refers to the presence of more conserved quantities than degrees of freedom. F or a Hamiltonian system with d degrees of freedom, maximal sup erin te- grabilit y means the existence of 2 d − 1 functionally indep endent integrals of motion, including the Hamiltonian. This strong constraint guaran tees the existence of p eriodic solutions; in frequency language, p erio dicit y holds if and only if all active frequen- cies Ω ℓ are rationally commensurate, i.e., there exists Ω 0 > 0 and integers m ℓ ∈ Z suc h that Ω ℓ = m ℓ Ω 0 for every active sector. This commensurabilit y condition is algebraic and indep enden t of symmetry . Equiv ariance, by con trast, imp oses compat- ibilit y betw een dynamical phases and the action of a symmetry group: under a time shift by τ n = T /n , the ℓ th sector acquires the phase e i Ω ℓ τ n , while the corresponding C n op eration acts with the fixed character e 2 π iℓ/n . Equiv arian t motion requires these phases to coincide, e i Ω ℓ τ n = e 2 π iℓ/n on all activ e sectors, a constraint not implied by sup erin tegrabilit y and typically satisfied only in sp ecial or degenerate cases. 11 3.2 Equiv ariance, c horeograph y , and fragmen tation Equation ( 3 ) is a mo de-by-mo de constraint. It depends not only on the sp ectrum { Ω ℓ } but on which sectors are dynamically activ e. Tw o consequences are immediate. First, commensurability of frequencies is neces- sary but not sufficient for choreograph y: perio dic motions ma y fail the phase-matching condition and hence cannot b e choreographies. Second, ev en when C n -equiv ariance holds, a single geometric trace is guaran teed only if, after accoun ting for exact resonant degeneracies, the active motion can b e represen ted within a single effective irreducible D n sector. When sev eral inequiv alen t D n sectors are simultaneously active, their characters are generically incompatible with a single common time shift. Even when the global C n phase-matc hing condition holds, the motion t ypically loses a common trace and b ecomes multi-tr ac e . In special cases, this m ulti-trace structure organizes in to sync hro- nized subsets of particles, each subset trav ersing a common closed curv e with uniform time shifts (a sub-choreograph y). When these sub-choreographies are supported on distinct closed curves, we call the resulting splitting chor e o gr aphic fr agmentation . commensurabilit y of active frequencies ⇒ p eriodicity ⇒ phase matching ( 3 ) ⇒ C n -equiv ariance ⇒ ( single effective sector ⇒ single–trace choreograph y , m ultiple inequiv alent sectors ⇒ m ulti-trace motion (fragmentation in sp ecial cases) . The remainder of the pap er illustrates how this general criterion op erates in practice. Sections 4.1 and 4.4 analyze the lo w- n cases n = 4 and n = 5, where C n - equiv ariance already enforces a single trace. Section 5 treats the six-bo dy problem, where equiv ariance is no longer sufficient and fragmen tation app ears. Section 7 extends the classification to arbitrary n > 6. 4 Lo w- n illustrations: four and fiv e b o dies W e now illustrate the phase-matching criterion of Section 2 in the simplest nontriv- ial cases n = 4 and n = 5. In b oth systems only t wo inequiv alen t internal frequency branc hes are present, and C n -equiv ariance already suffices to enforce a single-trace c horeography . F or this reason we restrict the discussion here to the structural conclusions, deferring all diagonalizations and algebraic details to the appendices. 4.1 Case n = 4 Section 4.1 is devoted to the case n = 4, which already illustrates the separation b et w een (i) p erio dicit y , con trolled by commensurabilit y of the internal frequencies, (ii) C 4 -equiv ariance, con trolled b y the phase-matc hing constraint of Theorem 2 , and (iii) the geometric distinction b et w een a single four-b o dy choreograph y (one common trace) and c horeographic fragmentation (m ultiple traces), whic h dep ends on whic h D 4 sectors are dynamically activ e. In this case the internal sp ectrum consists of one 2D 12 D 4 doublet and one 1D Nyquist sector, so at most t w o frequency branc hes can app ear, but a four-b o dy c horeography need not inv olve b oth. 4.2 Hamiltonian and D 4 –in v ariant p oten tial First, let us consider the classical system of four particles moving in the Euclidean plane R 2 , with equal masses ( m 1 = m 2 = m 3 = m 4 = m ) and sub ject to a quadratic pairwise interaction p otential. The corresponding Hamiltonian is H 4 = 1 2 m ( p 2 1 + p 2 2 + p 2 3 + p 2 4 ) + V 4 ( r ij ) , (4) where the p otential takes the D 4 -in v ariant form V 4 ( r ij ) = 1 2 m ω 2 h κ (4) 1 ( r 2 12 + r 2 23 + r 2 34 + r 2 14 ) + κ (4) 2 ( r 2 13 + r 2 24 ) i . (5) F or the time b eing, we fix the coupling constants as κ (4) 1 = 1 > 0 , κ (4) 2 = − 1 2 < 0 . (6) This particular choice ( 6 ) has app eared previously and w as studied in detail in [ 22 ]. As usual, r ij = r i − r j denotes the relative p osition vector b et ween particles i and j , and r ij = | r ij | its magnitude (the relative distance). The phase space has dimension 16. Nearest-neigh b or in teractions carry strength 1 2 m ω 2 , while opp osite vertices in teract with half that strength and with opp osite (repulsive) sign. Details of the separation of v ariables and the resulting tra jectories are given in Appendix A.1 . r 13 r 24 r 1 r 2 r 3 r 4 X Y σ d σ d ′ C 4 D 4 = ⟨ C 4 , σ X ⟩ Fig. 1 Distinguished relative co ordinates and the action of D 4 for n = 4. Here σ X and σ d denote reflections across axial and diagonal mirror axes of the square, resp ectively . 13 Figure 1 illustrates the D 4 symmetry at n = 4 in terms of distinguished rela- tiv e co ordinates: the dihedral action is generated by the cyclic relab eling/rotation C 4 together with an axial reflection (and hence also the diagonal reflections), and here D 4 -in v ariance refers to the symmetry of the index c ouplings (edges/diagonals of the abstract square), not necessarily to an instantaneous square configuration. Visually , basic subgroups corresp ond to rigid symmetries of the coupling pattern (e.g. the half- turn C 2 ≤ C 4 pairs opp osite vertices, while reflections pair v ertices across a mirror axis), and these orbit partitions anticipate the p ossible wa ys b odies can organize into sync hronized groups when more than one sector is activ e. 4.3 General frequencies, sup erintegrabilit y , and choreographies In full generalit y , for the quadratic four-b ody p oten tial ( 5 ) with arbitrary couplings ( κ (4) 1 , κ (4) 2 ), diagonalizing the Hamiltonian ( 4 ) yields four frequencies Ω i . The cen ter- of-mass mo de has zero frequency , Ω 0 = 0. The remaining three internal mo des are Ω 1 = 2 ω q κ (4) 1 , Ω 2 = Ω 3 = ω q 2 κ (4) 1 + κ (4) 2 . Assuming κ (4) 1 > 0, κ (4) 1 + κ (4) 2 > 0, and 2 κ (4) 1 > κ (4) 1 + κ (4) 2 the low er frequency branch is the doubly degenerate one, Ω F := Ω 2 = Ω 3 , Ω N := Ω 1 . The ratio is Ω N Ω F = v u u t 2 κ (4) 1 κ (4) 1 + κ (4) 2 . Conceptual remark. F or n = 4 the internal dynamics splits in to a single 2D D 4 doublet (the fundamen tal sector) with frequency Ω F and a 1D Nyquist sector with frequency Ω N . If b oth sectors are dynamically activ e, p erio dicit y of the full motion requires the commensurabilit y condition Ω N / Ω F ∈ Q . How ev er, the existence of a four-b o dy chor e o gr aphy is not determined b y commensurability alone: it depends on whic h symmetry sectors are excited and whether their phases satisfy the C 4 phase- matc hing constraint. In particular, if the Nyquist sector is inactive, the question reduces to phase–locking within the D 4 doublet, leading generically to a sync hronized (2 + 2) dimer motion and, for sp ecial relativ e phases, to a single four–bo dy trace; when distinct traces o ccur we sp eak of fragmen tation (see Section 4.3.1 ). Sup erin tegrabilit y . In the space of relative motion, a necessary condition for maxi- mal superintegrabilit y is that the t wo distinct in ternal frequencies b e rationally related [ 26 , 31 ]: Ω N Ω F = p ∈ Q . This requires 2 κ (4) 1 κ (4) 1 + κ (4) 2 = p 2 , p ∈ Q , 14 or equiv alen tly κ (4) 2 = 2 p 2 − 1 κ (4) 1 . Th us, any rational ratio 1: p can b e engineered by suitable couplings. Neverthe- less, maximal sup erin tegrabilit y (and hence p erio dicit y) does not by itself imply C 4 -equiv ariance, and therefore do es not guarantee the existence of a four–b o dy c horeography . Choreographies . A planar four-b o dy c horeography is equiv alen t to C 4 -equiv ariance, i.e. inv ariance under the generator (time shift by τ 4 := T / 4 together with the cyclic relab eling/rotation by 2 π / 4). In the normal–mo de v ariables this b ecomes a phase- matc hing condition applied sector by sector (Theorem 2 ). The equiv alence betw een c horeography and C n -equiv ariance holds for n = 4 (and in the presen t quadratic family also for n = 5), but for n ≥ 6 C n -equiv ariance is only a necessary condition and do es not by itself exclude multi-trace (fragmented) motions. If only the fundamen tal D 4 doublet is active, C 4 -equiv ariance reduces to the appro- priate phase relation within that doublet; generically one obtains a sync hronized (2 + 2) dimer motion, while a special phase–lo c king yields a single four–b o dy trace (cf. Section 4.3.1 ). If, in addition, the Nyquist sector is activ e, then C 4 -equiv ariance must hold simulta- neously for the doublet and the Nyquist mo de; this imp oses an additional compatibility b et w een Ω N and Ω F (b ey ond mere p erio dicit y), selecting the distinguished harmonic lo c king that pro duces the classical n = 4 lima¸ con family . Step 1: mo de phases fixe d by the C 4 action. F or a F ourier mo de of index ℓ , the C n generator acts b y a fixed phase e iq ℓ with q ℓ = 2 π ℓ/n (so that under t 7→ t + τ n the mo de must pick up the same phase). F or n = 4 this gives q 1 = π 2 (fundamen tal doublet) , q 2 = π (Nyquist mo de) . Step 2: time shift phases fr om the oscil lator fr e quencies. If a mo de with frequency Ω is active, its complex amplitude acquires the factor e i Ω τ 4 under t 7→ t + τ 4 . C 4 - equiv ariance therefore requires e i Ω F τ 4 = e iq 1 = e iπ / 2 , e i Ω N τ 4 = e iq 2 = e iπ = − 1 . Step 3: C 4 phase-matching sele cts p ≡ 2 (mo d 4) (primitive p = 2 ). Assume the sup erin tegrable resonance Ω N = p Ω F with p ∈ Q . When p is rational (and in particular when p is an integer), a common p eriod can b e c hosen as T = 2 π / Ω F , hence τ 4 = T 4 = π 2Ω F . Substituting τ 4 = π / (2Ω F ) into the Nyquist phase constraint gives e i Ω N τ 4 = e ipπ / 2 = − 1, hence pπ / 2 ≡ π (mo d 2 π ), i.e. p ≡ 2 (mo d 4). Equiv alently , p = 4 k + 2; the smallest p ositiv e solution is p = 2, so Ω N = 2 Ω F . Higher solutions p = 4 k + 2 lie in the same phase class and do not define a distinct primitive choreographic resonance. 15 Step 4: tr anslating p = 2 into c ouplings. F or the quadratic four-b ody p oten tial with couplings ( κ (4) 1 , κ (4) 2 ), the internal frequencies satisfy Ω N = 2 ω q κ (4) 1 , Ω F = ω q 2 κ (4) 1 + κ (4) 2 , ⇒ Ω N Ω F = v u u t 2 κ (4) 1 κ (4) 1 + κ (4) 2 . Imp osing Ω N / Ω F = p yields 2 κ (4) 1 κ (4) 1 + κ (4) 2 = p 2 ⇐ ⇒ κ (4) 2 = 2 p 2 − 1 κ (4) 1 . F or the choreographic v alue p = 2 this b ecomes κ (4) 2 = − 1 2 κ (4) 1 , and for the choice κ (4) 1 = 1, κ (4) 2 = − 1 2 one obtains Ω F = ω , Ω N = 2 ω , producing the (1:2) lima¸ con choreograph y . 4.3.1 F ragmen tations Only tw o synchronization patterns are compatible with the D 4 symmetry: (i) Generic (2+2) de c omp osition (dimer splitting). The tw o diagonal mo des oscillate indep enden tly . Particles (1 , 3) and (2 , 4) each form a synchronized dimer executing a tw o-bo dy choreograph y , but the t wo dimers are dynamically indep endent (see Fig. 2 ). Accordingly , the residual time-shift symmetry is only C 2 . (ii) F our–b o dy chor e o gr aphy. When sp ecific initial conditions hold, the t wo diagonal mo des phase-lo c k and combine in to a single C 4 -equiv arian t motion. All four parti- cles trav erse the same closed curve with uniform quarterp eriod time shifts (see Fig. 3 ). This is the unique four-b o dy choreograph y compatible with D 4 symmetry . A (3+1) pattern is symmetry–forbidden, since D 4 con tains no elemen t of order 3. 16 - 1.0 - 0.5 0.5 1.0 x - 0.5 0.5 1.0 1.5 y 1 2 3 4 Fig. 2 F our-bo dy D 4 -inv ariant quadratic system in the sup erin tegrable (1 : 2) regime ( m = 1, ω = 1, κ (4) 1 = 1, κ (4) 2 = − 1 2 ) sho wing a (2 + 2) choreographic fragmentation. Initial conditions at t = 0: r 1 = (1 , 1), r 2 = ( − 1 , 1 2 ), r 3 = (0 , 0), r 4 = ( − 1 2 , − 1 2 ); p 1 = (0 , 3 2 ), p 2 = ( − 1 2 , − 1), p 3 = (0 , 1 2 ), p 4 = ( 1 2 , − 1). Particles (1 , 3) and (2 , 4) form tw o sync hronized dimers, each executing a t wo-bo dy choreograph y with time shift T / 2; the full motion is p eriodic but only C 2 -equiv arian t (hence not a single four-b ody choreograph y). - 0.5 0.5 1.0 x - 0.5 0.5 y 1 2 3 4 Fig. 3 F our-bo dy (1 : 2) lima¸ con choreograph y in the sup erintegrable D 4 -inv ariant quadratic mo del with m = 1, ω = 1, κ (4) 1 = 1, κ (4) 2 = − 1 2 (hence Ω F = 1, Ω N = 2). Initial conditions at t = 0: r 1 = (1 , 0), r 2 = ( − 1 2 , 1 2 ), r 3 = (0 , 0), r 4 = ( − 1 2 , − 1 2 ); p 1 = (0 , 3 2 ), p 2 = ( − 1 2 , − 1), p 3 = (0 , 1 2 ), p 4 = ( 1 2 , − 1). All four particles trav erse the same closed curve with time shift T / 4, realizing the primitive 1:2 sup erin tegrable four-b ody choreograph y . 17 4.4 Case n = 5 4.5 Hamiltonian and D 5 –in v ariant p oten tial F or five equal masses in the plane, case n = 5, the most general quadratic D 5 –in v ariant Hamiltonian reads H 5 = 1 2 m 5 X i =1 p 2 i + V 5 ( r ij ) , i, j = 1 , . . . , 5 , (7) with 20-dimensional phase space. The p oten tial V 5 ( r ij ) includes first- and second- neigh b or couplings determined by the index structure of an abstract regular p en tagon, see. Fig. ( 4 ). Explicitly V 5 = 1 2 m ω 2 h κ (5) 1 r 2 12 + r 2 23 + r 2 34 + r 2 45 + r 2 15 + κ (5) 2 r 2 13 + r 2 14 + r 2 24 + r 2 25 i . (8) A sup erin tegrable choice is κ (5) 1 = 1 2 3 √ 5 + 1 > 0 , κ (5) 2 = − 1 2 3 √ 5 − 1 < 0 , (9) corresp onding to a strong attractive coupling b et ween nearest neighbors and a weak er repulsiv e coupling b et ween second neighbors. Details of the separation of v ariables and the resulting tra jectories are giv en in App endix A.2 . r 1 r 2 r 3 r 4 r 5 X Y σ d R 2 π / 5 C 5 D 5 = ⟨ C 5 , σ d ⟩ Fig. 4 Second-neighbor relative vectors for n = 5. Blue arrows represent the equiv alen t second- neighbor b onds. These variables diagonalize the quadratic D 5 -inv ariant Hamiltonian. The p en tagon in Fig. 4 is b est understo od b y combining the spatiotemp oral D 5 symmetry with the D 5 normal–mo de (F ourier) decomposition of the center–of–mass 18 dynamics. The dihedral action is generated by a rotation r through 72 ◦ and a reflec- tion s (with r 5 = s 2 = e and sr s = r − 1 ); C 5 -equiv ariance corresp onds to inv ariance under rotation b y 72 ◦ together with a time shift T / 5, while full D 5 symmetry adds an appropriate reflection symmetry (t ypically up to relab eling and a time shift, and in rev ersible settings p ossibly time reversal). On the mo de level, the internal space splits into tw o D 5 –in v ariant irreducible sectors, H int = H 1 ⊕ H 2 (doublets with char- acters e 2 π iℓ/ 5 , ℓ = 1 , 2). If the motion lies in a single sector, the fiv e tra jectories are time–shifts of one curve and one obtains a genuine 5–b o dy single–trace c horeography . If b oth inequiv alen t sectors are excited, the motion ma y remain p eriodic and even C 5 –equiv arian t (phase matc hed sectorwise), but the generic outcome is m ulti–trace b eha viour: the b odies organize in to sync hronized sub–c horeographies (e.g. (3+2) or (2+2+1)) rather than sharing a common geometric trace. 4.6 General frequencies, sup erintegrabilit y , and choreographies The general D 5 –in v ariant quadratic potential V 5 = 1 2 m ω 2 h κ (5) 1 5 X i =1 r 2 i,i +1 + κ (5) 2 5 X i =1 r 2 i,i +2 i , con tains t wo independent couplings κ (5) 1 and κ (5) 2 . Diagonalizing the associated quadratic form yields one zero mo de and four internal mo des organized in t wo doublets. The tw o distinct internal frequencies are Ω 1 = ω p λ − ; Ω 2 = ω p λ + , where the stiffness eigen v alues are λ ± = 1 2 h 5 κ (5) 1 + κ (5) 2 ± √ 5 κ (5) 1 − κ (5) 2 i , (10) eac h with multiplicit y 2. Reality requires λ ± > 0. Conceptual remark. As in the case n = 4, a D 5 –in v ariant quadratic interaction yields only two distinct internal frequencies, each doubly degenerate (tw o 2D D 5 doublets). Thus motions in the full in ternal phase space inv olve at most these tw o fre- quency branc hes. There is therefore no three–frequency resonance obstruction of the t yp e that app ears for n = 6; instead, choreographic symmetry reduces to whether the activ e doublets can satisfy the C 5 phase-matc hing constrain t simultaneously . Sup erin tegrabilit y . The motion is maximally sup erin tegrable when the tw o distinct frequencies are commensurate: Ω 2 Ω 1 = p ∈ Q . 19 Using ( 10 ), this b ecomes λ + λ − = p 2 = 5( κ (5) 1 + κ (5) 2 ) + √ 5( κ (5) 1 − κ (5) 2 ) 5( κ (5) 1 + κ (5) 2 ) − √ 5( κ (5) 1 − κ (5) 2 ) . Ev ery rational p determines a one-parameter family of couplings for which the system is maximally sup erin tegrable. Nevertheless, maximal sup erin tegrability (and hence p eriodicity) do es not b y itself guaran tee five–bo dy choreographic symmetry . Choreographies . A fiv e–b ody c horeography is equiv alent to C 5 -equiv ariance: each oscillatory sector con tributing to the Lissa jous curv e γ ( t ) must acquire the appropriate fifth ro ot of unity under a one-fifth–p erio d time shift, γ t + T 5 = R 2 π / 5 γ ( t ) . If tw o in ternal mo des satisfy a rational resonance Ω 2 = p Ω 1 , then their time-shift phases ob ey e i Ω 2 T / 5 = e i Ω 1 T / 5 p . Requiring the tw o dynamically active doublets to transform compatibly under the T / 5 shift forces p = 2. As in the n = 4 case, the eigenfrequencies Ω 1 , 2 ( κ (5) 1 , κ (5) 2 ) dep end on the coupling parameters, but their C 5 c haracters under the one-fifth-perio d time shift are fixed. Consequently , the 1 : 2 resonance is the only rational ratio compatible with five-bo dy choreographic symmetry in the full phase space. Equiv alen tly , from a representation-theoretic viewp oin t, a five-bo dy choreogra- ph y requires the active frequency sectors to satisfy the C 5 phase-matc hing condition sim ultaneously , so that their sup erposition is C 5 -equiv arian t. In this mo del the only commensurate choice for which the t wo doublets can satisfy this constrain t together is the pairing of angular indices ℓ = 1 and ℓ = 2 with the resonance Ω 2 = 2 Ω 1 , whic h yields the classical fiv efold hypo cycloidal (p en tagram) choreograph y . F or an y other rational ratio p = 2, the t w o sectors carry inequiv alent D 5 c haracters under the T / 5 shift and their sup erposition cannot satisfy the global choreographic condition r i ( t ) = r 1 t + ( i − 1) T 5 . The motion remains sup erin tegrable (hence p eriodic), but five-bo dy choreographic symmetry is lost; generically one obtains only reduced time-shift symmetry on prop er submotions, and when these submotions are supported on distinct closed curves the resulting multi-trace splitting is precis ely the fragmentation phenomenon discussed later. 4.6.1 F ragmen tations Because the internal dynamics consists of t wo indep enden t D 5 doublets, only a limited set of synchronization patterns can arise when global C 5 -equiv ariance fails: 20 (a) (3+2) fr agmentation. One doublet organizes a synchronized three-b ody sub-choreograph y , while the other organizes a synchronized dimer. The resulting motion has a residual C 3 time-shift symmetry on the three-b ody submotion, but it is not C 5 -equiv arian t and hence is not a fiv e-b o dy choreograph y . When the three-b ody and t w o-b ody submotions are supp orted on distinct closed curv es, the o verall motion is choreographically fragmented. R emark. The C 3 app earing in (a) is not a geometric subgroup of the rotation group C 5 ; it is a dynamic al cyclic symmetry acting on the three–b ody submotion. Concretely , it means that three particles tra verse a common curve with time shifts of T / 3, i.e. for an appropriate parametrization γ ( t ), γ t + T 3 = R 2 π / 3 γ ( t ) , while the remaining tw o particles form an indep enden t synchronized dimer. This explains ho w a (3+2) split can o ccur ev en though C 5 admits no threefold rotation subgroup. (b) (2+2+1) de c omp osition. Eac h doublet produces a sync hronized dimer on separate curves, while the remain- ing particle follows its own different tra jectory (see Fig. 5 ). This configuration is equiv arian t under C 2 on each dimer but has no global C 5 time–shift symmetry . (c) F ul l five-b o dy chor e o gr aphy. When the tw o doublets satisfy the (1:2) resonance Ω 2 = 2 Ω 1 and the corresp ond- ing phase-matching condition, their sup erposition lo c ks into the lima¸ con five–bo dy c horeography with full C 5 equiv ariance (see Fig. 6 ). (d) F orbidden p atterns. A (4+1) configuration is symmetry-forbidden, since D 5 con tains no elemen t of order 4. 21 - 0.6 - 0.4 - 0.2 0.2 0.4 0.6 0.8 x - 0.4 - 0.2 0.2 0.4 y 1 2 3 4 5 Fig. 5 Fiv e-bo dy D 5 –inv ariant quadratic system in the sup erin tegrable (1 : 2) regime ( m = 1, ω = 1, κ (5) 1 = 1 2 ( 3 √ 5 + 1), κ (5) 2 = − 1 2 ( 3 √ 5 − 1)) showing a (2 +2 + 1) choreographic fragmentation. Initial condi- tions at t = 0: r 1 = ( − 0 . 144427191 , 0 . 079179607), r 2 = (0 . 659016994 , 0 . 140983006), r 3 = (1 . 0 , 0 . 5), r 4 = (0 . 2 , − 0 . 1), r 5 = ( − 0 . 3 , 0 . 4); p 1 = (0 . 1 , − 0 . 090450850), p 2 = (0 . 023606798 , − 0 . 002254249), p 3 = ( − 0 . 223606798 , 0 . 192705098), p 4 = (0 . 2 , − 0 . 15), p 5 = ( − 0 . 1 , 0 . 05). Two synchronized dimers and one isolated particle ev olve on distinct closed curves; the motion is p eriodic but only equiv arian t under a prop er cyclic subgroup of C 5 , and therefore do es not form a single five-bo dy choreograph y (choreographic fragmentation). - 0.3 - 0.2 - 0.1 0.1 0.2 0.3 x - 0.3 - 0.2 - 0.1 0.1 0.2 y 1 2 3 4 5 Fig. 6 Five-bo dy C 5 –equiv arian t lima¸ con choreograph y in the superintegrable D 5 –inv ariant quadratic mo del with m = 1, ω = 1, κ (5) 1 = 1 2 3 √ 5 + 1 , κ (5) 2 = − 1 2 3 √ 5 − 1 , yield- ing the resonant spectrum Ω 2 = 2Ω 1 . Initial conditions at t = 0: r 1 = (0 . 10 , 0 . 24), r 2 = ( − 0 . 1101667611 , − 0 . 0990584271), r 3 = (0 . 1473518645 , 0 . 1329426038), r 4 = ( − 0 . 3091552633 , 0 . 0153855535), r 5 = (0 . 1719701600 , − 0 . 2892697302); p 1 = ( − 0 . 48 , 0 . 10), p 2 = (0 . 2932225056 , − 0 . 2512352217), p 3 = ( − 0 . 2071066826 , 0 . 3756054284), p 4 = ( − 0 . 0895496320 , − 0 . 5374088272), p 5 = (0 . 4834338090 , 0 . 3130386205). All particles trav erse the same closed curve with uniform time shift T / 5 = 2 π / (5Ω 1 ), realizing a noncircular p en tagonal (lima¸ con-t yp e) fiv e-b ody choreograph y . 22 4.7 Structural lessons from low n The cases n = 4 and n = 5 already illustrate the distinction emphasized in Section 2 : p eriodicity alone is insufficient for choreograph y , while C n -equiv ariance enforces a strong additional constraint on the activ e F ourier sectors. A t the same time, these lo w- n systems remain rigid. Because at most tw o inequiv- alen t D n sectors are present, the phase-matc hing criterion automatically collapses the motion to a single effective representation. As a result, C n -equiv ariance and single-trace choreograph y coincide for n ≤ 5. This rigidity breaks do wn for n = 6, where three inequiv alen t symmetry sectors co exist and C n -equiv ariance no longer guaran tees a single geometric trace. The six- b ody problem is therefore qualitatively different and forms the cen terpiece of the pap er. 5 Case n = 6: equiv ariance v ersus single-trace c horeograph y The six-b o dy system is the first v alue of n for which C n -equiv ariance and single- tr ac e c horeography generically div erge. In con trast to the lo wer cases n = 4 , 5, three inequiv alen t in ternal symmetry sectors co exist (t w o doublets and one Nyquist singlet), so that ev en maximally resonant, sup erintegrable p eriodic motion need not collapse in to one geometric trace. This section mak es the mechanism explicit and exhibits the generic emergence of chor e o gr aphic fr agmentation . 5.1 Hamiltonian and D 6 –in v ariant quadratic p oten tial F or six equal masses, the most general D 6 -in v ariant quadratic Hamiltonian reads H 6 = 1 2 m 6 X i =1 p 2 i + 1 2 m ω 2 κ (6) 1 r 2 12 + r 2 23 + r 2 34 + r 2 45 + r 2 56 + r 2 16 + 1 2 m ω 2 κ (6) 2 r 2 13 + r 2 24 + r 2 35 + r 2 46 + r 2 15 + r 2 26 + 1 2 m ω 2 κ (6) 3 r 2 14 + r 2 25 + r 2 36 . (11) The p oten tial contains three coupling parameters κ (6) 1 , κ (6) 2 , κ (6) 3 . Here, indices are understo od mo dulo 6 and r ij = | r i − r j | . The three couplings κ (6) 1 , 2 , 3 corresp ond to first neigh b ors, second neighbors, and opp osite v ertices of an abstract hexagon. 5.2 Normal-mo de structure and (maximal) sup erin tegrabilit y After remo v al of the center-of-mass motion, diagonalization by the discrete F ourier transform yields three distinct internal stiffness eigenv alues λ ℓ and frequencies Ω ℓ = 23 ω √ λ ℓ , ℓ = 1 , 2 , 3: λ 1 = κ (6) 1 + 3 κ (6) 2 + 2 κ (6) 3 , λ 2 = 3 κ (6) 1 + 3 κ (6) 2 , λ 3 = 4 κ (6) 1 + 2 κ (6) 3 . (12) The sectors ( ℓ, 6 − ℓ ) with ℓ = 1 , 2 form tw o inequiv alen t t wo-dimensional D 6 irre- ducible represen tations (cosine-sine doublets), while the Nyquist sector ℓ = 3 is one-dimensional. Because the in ternal motion separates into uncoupled oscillators, the system is in tegrable and b ecomes maximally sup erin tegrable whenever the indep enden t ratios Ω 2 Ω 1 = p 1 ∈ Q , Ω 3 Ω 1 = p 2 ∈ Q (13) are rational. Equiv alen tly , λ 2 /λ 1 = p 2 1 and λ 3 /λ 1 = p 2 2 , which imp oses t wo homoge- neous linear relations among the three couplings and leav es a one–parameter family of maximally sup erintegrable Hamiltonians for each rational pair ( p 1 , p 2 ). Key p oint. Sup erintegrabilit y (hence perio dicit y) do es not decide whether the resulting perio dic orbit is a single six-b ody choreograph y: that requires a symmetry realization constraint, namely C 6 -equiv ariance, and even that is only necessary , not sufficien t, for a single geometric trace when m ultiple inequiv alent D 6 sectors are activ e. 5.3 C 6 phase matching and the 1:2:3 equiv ariant resonance Let T denote the global p eriod. The generator of C 6 acts on the ℓ th F ourier sector by the character e iq ℓ with q ℓ = 2 π ℓ 6 = ℓπ 3 . By Theorem 2 , C 6 -equiv ariance requires sectorwise phase matc hing: e i Ω ℓ T / 6 = e iq ℓ = e iℓπ / 3 (for each dynamically activ e ℓ ) . (14) If all three sectors ℓ = 1 , 2 , 3 are activ e and remain dynamically indep enden t, the smallest p ositiv e solution to ( 14 ) is the maximally resonant sp ectrum Ω 1 : Ω 2 : Ω 3 = 1 : 2 : 3 . (15) Th us, in the fully three-sector regime, the only primitive three-frequency C 6 – equiv arian t resonance is 1:2:3. 5.4 Why 1:2:3 is t ypically not a single–trace choreograph y: fragmen tation Ev en when ( 15 ) holds and ( 14 ) is satisfied, C 6 -equiv ariance do es not force a single geometric trace at n = 6. The obstruction is representation–theoretic: the active sec- tors ℓ = 1 , 2 , 3 lie in ine quivalent irreducible representations of D 6 (t wo doublets 24 and one singlet). Without a degeneracy allowing sectors to recombine inside a com- mon eigenspace, their sup erp osition generically remains a synchronized multi–se ctor motion. F or typical initial data at the 1:2:3 resonance, the six particle tra jectories b ecome m ulti–trace. In sp ecial cases this multi–trace motion organizes into synchronized sub–c horeographies supp orted on distinct closed curves; in that case we sp eak of c horeographic fragmen tation. 5.5 Degeneracy and restoration of a gen uine six–b o dy c horeograph y: the 1:2:2 lo cking A gen uine single–trace six–bo dy c horeography arises only when the in ternal symmetry structure effectively collapses. This o ccurs at the de gener ate resonance Ω 1 : Ω 2 : Ω 3 = 1 : 2 : 2 , (16) i.e. Ω 2 = Ω 3 , where the ℓ = 2 doublet and the ℓ = 3 Nyquist sector share an eigenspace and ma y recombine into a single effectiv e tw o–dimensional sector. In this regime the phase constraint ( 14 ) must b e applied to the r e c ombine d effective sector, and the resulting motion can b e b oth C 6 -equiv arian t and single-trace. 5.6 Reduced-subspace c horeographies The six-b o dy system may also exhibit choreographies on prop er inv ariant linear sub- spaces obtained by suppressing one symmetry sector through the initial data. F or instance, setting the Nyquist amplitude to zero restricts the dynamics to the t wo doublets, reducing ( 14 ) to a t wo-frequency constrain t that selects Ω 2 = 2Ω 1 , yielding an analytic (1:2) six-b ody choreograph y on the reduced subspace. Analogous t wo-mode restrictions can pro duce ( t, 3 t ) tw o-frequency choreographies. These should b e distinguished from the full-phase-space single-trace c horeography at the degenerate 1:2:2 lo c king ( 16 ). 5.7 Concrete 1:2:3 example and fragmen tation A representativ e fully resonant choice is ( κ (6) 1 , κ (6) 2 , κ (6) 3 ) = 2 , − 2 3 , 1 2 , for which ( 12 ) yields λ 1 = 1, λ 2 = 4, λ 3 = 9, hence Ω 1 : Ω 2 : Ω 3 = 1 : 2 : 3. This sp ectrum pro duces p erio dic and ev en C 6 -equiv arian t motions, but for generic initial conditions the motion is m ulti-trace; in sp ecial cases it organizes into synchronized sub-c horeographies supported on distinct curves, i.e. choreographic fragmentation. 25 5.7.1 F ragmen tations Not every rational resonance pro duces a six-bo dy choreograph y in the geometric sense: b esides the choreographic cases, resonant excitations generically destroy the global T / 6 time-shift relation. In many suc h resonant regimes the motion separates into sync hronized submotions with reduced time-shift symmetry , i.e. it is equiv arian t only under a prop er c yclic subgroup of C 6 . In the sense adopted here, w e reserve the term chor e o gr aphic fr agmentation for those resonan t motions in which the sync hronized submotions are supp orted on distinct closed curv es (up to rigid motions); resonan t solutions in which different submotions happ en to share the same geometric trace are treated as a degenerate, “phase-split” limit rather than fragmen tation in the geometric sense. (a) (3+3) fr agmentation ( C 3 , time shift T / 3 ). If the tw o D 6 doublets satisfy the resonance Ω 2 = 2Ω 1 while the Nyquist mo de is inactiv e or do es not phase-lo c k to them, the motion is typically C 3 -equiv arian t rather than C 6 -equiv arian t. The particles split into tw o synchronized triples, { 1 , 3 , 5 } , { 2 , 4 , 6 } , eac h executing a three-b ody sub-c horeography with time shift T / 3. The tw o triples are dynamically indep enden t; in our sense this constitutes fr agmentation precisely when the tw o triples are supported on distinct closed curv es (up to rigid motions). (b) (2+2+2) fr agmentation ( C 2 , time shift T / 2 ). If the Nyquist mo de resonates with the ℓ = 1 doublet while the ℓ = 2 doublet is inactiv e (or nonresonant), the system splits into three sync hronized dimers, (1 , 4) , (2 , 5) , (3 , 6) , eac h inv arian t under a half-p erio d time shift T / 2. The three dimers are dynamically indep enden t; in our view, this constitutes fr agmentation precisely when the dimers trace distinct closed curv es (up to rigid motions), see Fig. 7 . 26 - 1.0 - 0.5 0.5 1.0 x - 1.0 - 0.5 0.5 1.0 y 1 2 3 4 5 6 Fig. 7 Six-bo dy motion sho wing a (2 + 2 + 2) c horeographic fragmen tation. W e used ( κ (6) 1 , κ (6) 2 , κ (6) 3 ) = (2 , − 2 3 , 1 2 ) and m = ω = 1. Initial conditions at t = 0: r 1 = (1 . 05 , 0), r 2 = (0 . 475 , 0 . 909327), r 3 = ( − 0 . 525 , 0 . 822724), r 4 = ( − 0 . 95 , 0), r 5 = ( − 0 . 525 , − 0 . 822724), r 6 = (0 . 475 , − 0 . 909327); p 1 = (0 , 0 . 341), p 2 = ( − 0 . 295315 , 0 . 139500), p 3 = ( − 0 . 241621 , − 0 . 170500), p 4 = (0 , − 0 . 279000), p 5 = (0 . 241621 , − 0 . 170500), p 6 = (0 . 295315 , 0 . 139500). The six particles split into three synchronized di mers, each dimer executing a tw o-b ody choreography (a (2 + 2 + 2) frag- mentation of the full six-b ody motion). (c) F ul l six–b o dy chor e o gr aphy ( C 6 , time shift T / 6 ). When the double resonance Ω 2 = Ω 3 = 2 Ω 1 holds together with the corresp onding phase-matc hing condition, the active in ternal mo des transform compatibly under C 6 and lo c k into a fully C 6 -equiv arian t motion. All six particles tra verse the same closed curv e with uniform time shifts of T / 6, i.e. r i +1 ( t ) = r i t + T 6 . Other rational resonances ma y still yield p eriodic, maximally superintegrable motions, but they fail to realize the global T / 6 time-shift relation in the full phase space and instead exhibit reduced time-shift symmetry and/or fragmen tation. 27 - 2 - 1 1 2 3 x - 3 - 2 - 1 1 2 3 y 1 2 3 4 5 6 Fig. 8 Six-b o dy c horeography in the planar quadratic model. W e used ( κ (6) 1 , κ (6) 2 , κ (6) 3 ) = ( 7 2 , 1 2 , − 1) and m = ω = 1. Initial conditions at t = 0: r 1 = (2 . 98 , 0), r 2 = ( − 0 . 49 , 2 . 580756), r 3 = ( − 1 . 49 , − 0 . 848705), r 4 = (0 . 98 , 0), r 5 = ( − 1 . 49 , 0 . 848705), r 6 = ( − 0 . 49 , − 2 . 580756); p 1 = (0 , 4 . 96), p 2 = ( − 4 . 295486 , − 1 . 48), p 3 = (2 . 563435 , − 2 . 48), p 4 = (0 , 2 . 96), p 5 = ( − 2 . 563435 , − 2 . 48), p 6 = (4 . 295486 , − 1 . 48). All six particles mov e on the same curve determined by these initial data, forming a six-b ody choreographic motion. This choice realizes the degenerate locking Ω 2 = Ω 3 = 2Ω 1 (the 1:2:2 resonance). (d) F orbidden p atterns. T yp es suc h as (4+2) or (5+1) are symmetry–forbidden, since C 6 has no subgroups of orders 4 or 5. 5.7.2 Summary for n = 6 C 6 − → C 3 if Ω 2 = 2 Ω 1 and Ω 3 do es not phase–lo c k ⇒ (3+3) , C 2 if the resonance inv olves only the ℓ = 1 doublet and the Nyquist mo de ℓ = 3 ⇒ (2+2+2) , C 6 if Ω 2 = Ω 3 = 2 Ω 1 (with phase matc hing) ⇒ six–b ody choreograph y . Only the resonance pattern Ω 1 : Ω 2 : Ω 3 = 1 : 2 : 2 admits a six-b ody choreograph y with global C 6 equiv ariance and uniform time shift T / 6 in the full phase space. Other rational frequency relations may still yield peri- o dic, maximally sup erin tegrable motions, but they fail to satisfy the global T / 6 phase constrain t: generically one obtains reduced time-shift symmetry and/or choreographic fragmen tation, or choreographic behavior only after restricting to prop er in v arian t subspaces. In terestingly , for n = 6 the com bination of maximal sup erin tegrability , full C 6 c horeographic symmetry , and the cen tral-configuration prop ert y o ccurs precisely 28 for the rigidly rotating regular hexagon. In particular, any noncircular six-b ody c horeography fails to satisfy the central–configuration condition. 5.8 Summary: wh y n = 6 is qualitatively differen t The six-b ody problem is the first instance in whic h: ( i ) algebraic superintegrabilit y guaran tees p eriodic motion (via commensurability), ( ii ) the phase-matching criterion enforces C n -equiv ariance, and ( iii ) yet single-trace c horeography generically fails. The obstruction is representation-theoretic and arises from the sim ultaneous exci- tation of inequiv alent D 6 sectors. Only when exact degeneracies collapse sectors—here through the Ω 2 = Ω 3 degeneracy leading to the 1:2:2 lo cking—does a genuine six-bo dy c horeography app ear. This mechanism p ersists for arbitrary n > 6 and underlies the fragmen tation phenomena discussed in Section 6 . 6 Choreographic F ragmen tation F rom n = 6 onw ard, the implication C n –equiv arian t = ⇒ single–trace c horeography fails in general. The obstruction is representation–theoretic: the internal motion decomp oses in to inequiv alen t D n isot ypic comp onen ts (F ourier sectors), and—absent degeneracy—these components cannot collapse into a single effective sector. This hier- arc hy of implications and outcomes is summarized in T able 2 , while the concrete lo w– n cases that first exhibit the phenomenon are listed in T able 3 . 6.1 Hierarch y of notions Let r ( t ) b e a T –p erio dic solution of a quadratic D n –in v ariant system. W e distinguish: • P erio dicit y: r ( t + T ) = r ( t ). • C n –equiv ariance: inv ariance under the choreograph y generator (time shift T /n com bined with cyclic relab eling). Equiv alen tly , for every active F ourier sector ℓ , e i Ω ℓ T /n = e 2 π iℓ/n . • Single–trace choreograph y: all particles trav erse one geometric curv e with uniform delay T /n . • Choreographic fragmen tation: the solution is T –p erio dic and C n –equiv arian t, y et the particle tra jectories split into k > 1 synchronized sub–choreographies supp orted on distinct closed curves, as captured schematically in T able 2 . 29 6.2 Mechanism The internal dynamics decomp oses as H int = ⌊ n/ 2 ⌋ M ℓ =1 H ℓ , where eac h H ℓ carries a fixed C n c haracter. The phase–matching condition enforces sync hronization sector by sector, but it do es not force inequiv alent sectors to generate the same geometric trace. Consequently , C n –equiv ariance controls r elative timing but not necessarily a single curve ; see the distinction b et ween the second and third rows of T able 2 . Principle. A C n –equiv arian t p erio dic solution is a single–trace choreograph y if and only if, after accounting for exact resonant degeneracies, the active motion lies in one effective irreducible D n sector. If several inequiv alen t sectors remain activ e, fragmen tation is generic (T able 2 , last row). 6.3 Conceptual summary T able 2 organizes the basic notions used in the rest of the pap er and highligh ts the precise p oin t where the implication “equiv ariant ⇒ c horeography” can fail. Prop ert y Mathematical condition Geometric outcome Periodicity Active frequencies rationally com- mensurate Closed tra jectories C n –equiv ariance e i Ω ℓ T /n = e 2 πiℓ/n for all active ℓ Sync hronized motion with cyclic symmetry Single–trace choreograph y All active mo des lie in one effective D n isotypic comp onent One common geometric curve Choreographic fragmentation Multiple inequiv alent sectors active (with phase matching satisfied) Several synchronized closed curves (sub–choreographies) T able 2 Hierarch y of p eriodic, equivarian t, and choreographic behaviour. F ragmen tation o ccurs when equiv ariance holds across multiple inequiv alent D n sectors. 6.4 Low– n explicit cases The first v alues of n where these distinctions can b e seen explicitly are summarized in T able 3 . In particular, for n = 4 and n = 5 the resonance structure already p ermits m ultiple groupings of bo dies into submotions, while n = 6 is the first case with three frequency branc hes and the characteristic 1:2:2 resonance pattern that supp orts either a gen uine 6–b o dy choreograph y or the typical fragmentations listed in the final column of T able 3 . 30 n Couplings F req. branc hes Choreographic resonance (full space) Typical fragmentations 4 2 2 1:2 (2+2) or (4) 5 2 2 1:2 (3+2), (2+2+1), or (5) 6 3 3 1:2:2 (3+3), (2+2+2), or (6) T able 3 Summary of the low– n cases analyzed explicitly . F or n ≥ 6, m ulti–sector excitations can b e p eriodic and even C n –equiv arian t y et multi–trace (fragmented). 7 Extension to arbitrary n > 6 F or n > 6, no fundamen tally new mec hanism app ears b ey ond what is already visible at n = 6 (T able 3 ); rather, the n umber of inequiv alen t F ourier sectors gro ws with n , and with it the prev alence of solutions that are p eriodic and ev en C n –equiv arian t y et multi–tr ac e . In the terminology of Section 6 , this corresp onds to choreographic fragmen tation (T able 2 , last ro w) b ecoming the generic outcome whenev er more than one inequiv alen t sector is active. 7.1 Sector proliferation and constraint structure In the center–of–mass frame, the in ternal space decomposes in to H int = ⌊ n/ 2 ⌋ M ℓ =1 H ℓ , where eac h H ℓ is a D n –in v ariant isotypic component carrying a fixed C n c haracter. As n increases, generic initial data activ ates m ultiple inequiv alent sectors. Consequen tly , ev en when the motion is perio dic, the phase-matching conditions required for C n – equiv ariance must hold simultane ously across a larger active set, in the sense of T able 2 . 7.2 Periodicity v ersus equiv ariance v ersus c horeograph y Let A denote the set of activ e sectors. The following decision chain is the natural generalization of the lo w– n analysis summarized in T able 3 : 1. Periodicity . The motion is T -perio dic only if the active frequencies are rationally commensurate, so that all excited sectors close after a common time T (T able 2 , first row). 2. C n -equiv ariance. If the motion is perio dic, it is C n –equiv arian t only if eac h activ e sector satisfies the phase-matc hing constrain t e i Ω ℓ T /n = e 2 π iℓ/n , ℓ ∈ A, corresp onding to the second row of T able 2 . 3. Single-trace choreograph y . Even if C n -equiv ariance holds, a gen uine single– trace choreograph y requires that (after accounting for exact resonant degeneracies) 31 the active motion can b e represen ted inside one effective irreducible D n sector, i.e. that the third ro w of T able 2 applies. 4. F ragmen tation. If C n -equiv ariance holds but multiple inequiv alen t sectors remain activ e (nondegenerate), the motion is t ypically multi-trace and ma y organize into sub-c horeographies on distinct curves (T able 2 , last ro w). 7.3 Generic m ulti-trace b eha viour for large n F or n > 6, the proliferation of inequiv alen t sectors makes the “sector unification” required for the third ro w of T able 2 increasingly non-generic. Th us, while perio dic and ev en C n -equiv arian t motions may o ccur frequen tly through commensurabilities and phase matc hing, single-trace choreographies typically require additional degeneracies that collapse several sectors into one effective sector. In contrast, the fragmented scenarios listed for n = 4 , 5 , 6 in T able 3 should b e viewed as the first instances of the generic multi-trace patterns that dominate for n ≥ 6. These results complete the classification of choreographic and fragmented motions in quadratic D n -in v ariant n -b o dy systems. 8 Conclusions and outlo ok W e hav e analyzed c horeographic motion in quadratic D n -in v ariant n -b o dy systems from a unified symmetry-theoretic p erspective. The cen tral message of this work is that algebr aic r esonanc e and sup erinte gr ability ar e not sufficient to pr o duc e chor e o gr a- phies . Instead, the existence of a single-trace n -bo dy c horeography is gov erned b y a represen tation-theoretic phase-matc hing condition and, crucially , by the abilit y of the activ e symmetry sectors to recom bine into a single effective representation. Our main results can b e summarized as follows. First, we form ulated a general C n -equiv ariance (phase-matc hing) criterion v alid for all quadratic D n -in v ariant systems. This criterion isolates the precise obstruc- tion prev enting a p erio dic solution from b eing a choreograph y and makes explicit the distinction b et ween p erio dicit y , equiv ariance, and single–trace motion. Second, we show ed that for n ≤ 5 the phase-matc hing condition already enforces single-trace c horeography . In these lo w- n systems the internal symmetry structure is sufficien tly rigid that equiv ariance collapses the motion to a single effective sector. Third, we demonstrated that n = 6 is the first case in whic h this rigidity breaks do wn. Although maximally resonant sp ectra suc h as 1:2:3 satisfy the C 6 -equiv ariance condition, they generically fail to pro duce a six-b ody choreograph y . Instead, the motion is generically m ulti-trace, with particles supp orted on distinct closed curves; in sp ecial cases it fragments in to sub-choreographies on distinct traces supported on inequiv alen t symmetry sectors. Only at exceptional degenerate resonances, such as 1:2:2, do these sectors recombine and restore a genuine six-b ody choreograph y . F ourth, we introduced the notion of chor e o gr aphic fr agmentation and show ed that it provides the natural interpretation of this b ehavior. Multi-trace motion is generic (except for n = 4) whenever sev eral inequiv alent D n represen tations are simultane- ously activ e; choreographic fragmen tation o ccurs in sp ecial cases when the m ulti-trace motion organizes into sub-choreographies on distinct traces. Extending this analysis 32 to arbitrary n > 6, we argued that single-trace c horeographies become increasingly rare as n gro ws, despite the abundance of p eriodic and ev en C n -equiv arian t motions. T aken together, these results clarify the role of symmetry in choreographic dynam- ics. Choreographies are not the generic expression of sup erin tegrabilit y but rather exceptional configurations in which resonance, symmetry , and degeneracy align to pro duce a single geometric trace. Sev eral directions for future work suggest themselves. It would b e natural to in vestigate the p ersistence of choreographic and fragmen ted motions under nonlinear p erturbations of the quadratic Hamiltonian, as well as their stability prop erties. More generally , the represen tation-theoretic mec hanism iden tified here may pro vide a use- ful organizing principle for c horeographies in broader classes of man y-b o dy systems, including non-Hamiltonian or driv en settings. W e hop e that the distinction b et w een equiv ariance, choreograph y , and fragmenta- tion emphasized in this w ork will help to clarify the structure of collective motion in symmetric dynamical systems. Declaration of comp eting in terest The authors declare that they hav e no known comp eting financial interests or p ersonal relationships that could ha ve appeared to influence the w ork reported in this pap er. Data a v ailabilit y No data was used for the researc h described in the article. References [1] Mo ore, C.: Braids in classical dynamics. Ph ysical Review Letters 70 (24), 3675– 3679 (1993) https://doi.org/10.1103/Ph ysRevLett.70.3675 [2] Chenciner, A., Mon tgomery , R.: A remark able p eriodic solution of the three-bo dy problem in the case of equal masses. Annals of Mathematics 152 (3), 881–901 (2000) https://doi.org/10.2307/2661357 [3] Sim´ o, C.: Dynamical prop erties of the figure-eigh t solution of the three-b ody problem. In: Celletti, A., Sim´ o, C. (eds.) Celestial Mec hanics. Contemporary Mathematics, v ol. 292, pp. 209–228. American Mathematical So ciet y , Pro vidence, RI (2002) [4] Marchal, C.: The Three-Bo dy Problem. Elsevier, Amsterdam (2012) [5] Marchal, C.: How the metho d of minimization of action av oids singularities. Celestial Mechanics and Dynamical Astronom y 83 (1–4), 325–353 (2002) https: //doi.org/10.1023/A:1020128408706 33 [6] Barutello, V., T erracini, S.: Action minimizing orbits in the n -b ody problem with simple c horeography constraint. Nonlinearity 17 (6), 2015–2039 (2004) h ttps:// doi.org/10.1088/0951- 7715/17/6/002 [7] F errario, D., T erracini, S.: On the existence of collisionless equiv arian t minimiz- ers for the classical n -b o dy problem. Inv entiones Mathematicae 155 (2), 305–362 (2004) https://doi.org/10.1007/s00222- 003- 0322- 7 [8] Barutello, V., F errario, D., T erracini, S.: Symmetry groups of the planar n -b ody problem and action-minimizing solutions. Archiv e for Rational Mechanics and Analysis 190 (1), 189–237 (2008) https://doi.org/10.1007/s00205- 008- 0131- 7 [9] Chenciner, A., F´ ejoz, J., Montgomery , R.: Rotating eigh ts: I. the three γ i families. Nonlinearit y 18 (3), 1407–1424 (2005) https://doi.org/10.1088/0951- 7715/18/3/ 024 [10] Sim´ o, C.: New families of solutions in the n -b ody problem. In: Casacub erta, C., Mir´ o-Roig, R.M., V erdera, J. (eds.) European Congress of Mathematics. Progress in Mathematics, vol. 201, pp. 101–115. Birkh¨ auser, Basel (2001) [11] Barutello, V., T erracini, S.: Double choreographical solutions for n -b o dy t yp e problems. Celestial Mec hanics and Dynamical Astronomy 95 (1–4), 67–80 (2006) h ttps://doi.org/10.1007/s10569- 006- 9030- 0 [12] Montgomery , R.: The n -bo dy problem, the braid group, and action-minimizing p eriodic solutions. Nonlinearity 11 (2), 363–376 (1998) h ttps://doi.org/10.1088/ 0951- 7715/11/2/011 [13] Boyland, P .: T op ological metho ds in surface dynamics. T op ology and its Appli- cations 58 (3), 223–298 (1994) https://doi.org/10.1016/0166- 8641(94)00147- 2 [14] Kap ela, T., Sim´ o, C.: Computer assisted pro ofs for nonsymmetric planar c hore- ographies and for stabilit y of the eight. Nonlinearity 20 (5), 1241 (2007) h ttps: //doi.org/10.1088/0951- 7715/20/5/010 [15] F ujiwara, T., F ukuda, H., Ozaki, H.: Choreographic three b odies on the lem- niscate. Journal of Physics A: Mathematical and General 36 (11), 2791 (2003) h ttps://doi.org/10.1088/0305- 4470/36/11/310 [16] Alb ouy , A., Kaloshin, V.: Finiteness of central configurations of five bo dies in the plane. Annals of Mathematics 176 (1), 535–588 (2012) h ttps://doi.org/10.4007/ annals.2012.176.1.9 [17] Saari, D.G.: On the role and the prop erties of n -b ody problems. Celestial Mec hanics 21 , 9–20 (1980) https://doi.org/10.1007/BF01230241 [18] Montgomery , R.: Choreographies in the N -b ody problem. In: Ravindra, D.P ., 34 Sreeniv asan, K.R. (eds.) Proceedings of the In ternational Congress of Mathemati- cians (ICM 2010, Hyderabad), v ol. 2, pp. 169–197. W orld Scien tific, Singap ore (2011). https://www.wo rldscientific.com/w orldscibo oks/10.1142/7920 [19] Hamermesh, M.: Group Theory and Its Application to Ph ysical Problems. Addison-W esley , Reading, MA (1962) [20] Tinkham, M.: Group Theory and Quantum Mechanics. Dov er Publications, New Y ork (2003). Reprint of the 1964 McGraw–Hill edition [21] F ulton, W., Harris, J.: Representation Theory: A First Course. Graduate T exts in Mathematics, vol. 129. Springer, New Y ork (1991) [22] Escobar-Ruiz, A.M., F ern´ andez-Guasti, M.: On the four-b o dy lima¸ con chore- ograph y: maximal superintegrabilit y and choreographic fragmen tation. Celestial Mec hanics and Dynamical Astronomy 137 (4) (2025) https://doi.org/10.1007/ s10569- 025- 10255- 1 [23] Miller, W., Post, S., Winternitz, P .: Classical and quantum sup erin tegrability with applications. Journal of Physics A: Mathematical and Theoretical 46 , 423001 (2013) https://doi.org/10.1088/1751- 8113/46/42/423001 [24] T emp esta, P ., Win ternitz, P ., Harnad, J., Miller Jr., W., Pogosy an, G., Ro dr ´ ıguez, M.A. (eds.): Sup erin tegrability in Classical and Quantum Systems. CRM Pro- ceedings & Lecture Notes, vol. 37. American Mathematical Society , Pro vidence, RI (2004) [25] Calogero, F.: Solution of the one-dimensional n -b o dy problem with quadratic and/or inv ersely quadratic pair p oten tials. Journal of Mathematical Physics 12 (3), 419–436 (1971) h ttps://doi.org/10.1063/1.1665604 [26] Perelomo v, A.M.: Integrable Systems of Classical Mec hanics and Lie Algebras. Birkh¨ auser, Basel (1990) [27] Escobar-Ruiz, A.M., Azua je, R.: On particular in tegrability in classical mechan- ics. Journal of Ph ysics A: Mathematical and Theoretical 57 (10), 105202 (2024) h ttps://doi.org/10.1088/1751- 8121/ad2a1c [28] T urbiner, A.V.: P articular integrabilit y and (quasi)-exact-solv ability . Journal of Ph ysics A: Mathematical and Theoretical 46 (2), 025203 (2012) https://doi.org/ 10.1088/1751- 8113/46/2/025203 [29] F ernandez-Guasti, M., F ujiw ara, T., P ´ erez-Cha vela, E., Zhu, S.: N-b ody chore- ographies on a p-lima¸ con curve. Journal of Differen tial Equations 454 , 113940 (2026) https://doi.org/10.1016/j.jde.2025.113940 [30] F ern´ andez-Guasti, M.: Analytic four-b o dy lima¸ con c horeography . Celestial 35 Mec hanics and Dynamical Astronomy 137 (4) (2025) https://doi.org/10.1007/ s10569- 024- 10235- x [31] Ev ans, N.W.: Sup erin tegrability in classical mec hanics. Physical Review A 41 (10), 5666–5676 (1990) https://doi.org/10.1103/Ph ysRevA.41.5666 A Separation of v ariables: normal mo de decomp osition This app endix collects technical details underlying the explicit solutions discussed in the main text. F or completeness, we presen t the separation of v ariables, normal–mo de co ordinates, and representativ e tra jectory form ulas for the cases n = 4, n = 5, and n = 6 in detail, as well as for the general case. Throughout, we work in the center–of–mass frame and exploit the blo c k–circulant structure of the quadratic D n –in v ariant in teraction matrix. Diagonalization b y the discrete F ourier transform reduces the relative dynamics to a collection of uncou- pled planar harmonic oscillators, each asso ciated with an irreducible representation of D n . The resulting solutions are elementary but provide a concrete realization of the represen tation–theoretic mec hanisms discussed in the main text. A.1 Case n = 4 In the original vectorial coordinates r i ∈ R 2 , the p oten tial ( 5 ) with coupling constants ( 6 ) is not diagonal. Ho wev er, because it is quadratic, one may perform the linear p oin t transformation s 0 s 1 s 2 s 3 = M r 1 r 2 r 3 r 4 , θ 4 = π 2 , where M = M ( θ 4 ) is the orthogonal 8 × 8 matrix 1 M = 1 2 1 2 1 2 1 2 0 − 1 √ 2 0 1 √ 2 1 √ 2 0 − 1 √ 2 0 − 1 √ 2 1 √ 2 − 1 √ 2 1 √ 2 . In terms of the vector co ordinates s i ∈ R 2 , this transformation diagonalizes the Hamiltonian ( 4 ): H 4 = 1 2 m P 2 0 + P 2 1 + P 2 2 + P 2 3 + 1 2 m ω 2 s 2 1 + s 2 2 + 4 s 2 3 , 1 Each entry in M is a 2 × 2 diagonal matrix. 36 where s 0 describ es the center of mass and s i = | s i | . Therefore, the in ternal dynamics (relativ e motion) decomposes into three harmonic mo des: a doubly degenerate pair with frequency Ω 1 = Ω 2 = ω and a Nyquist mo de with frequency Ω 3 = 2 ω . The Nyquist mo de is the highest discrete in ternal frequency , corresponding to the F ourier index k = n/ 2 for ev en n , in which adjacen t particles oscillate exactly out of phase ( e iπ = − 1). The frequency of the mo de asso ciated with the center-of-mass motion v anishes iden tically . Normalization remark. F or even n , the general D n p oten tial (see section 7 ) V n = 1 2 m ω 2 ⌊ n/ 2 ⌋ X k =1 κ ( n ) k n X i =1 ( r i − r i + k ) 2 , coun ts opp osite-v ertex b onds ( k = n/ 2) twice. F or n = 4 we list these b onds only once; therefore κ (4) 2 7→ 2 κ (4) 2 when comparing with the general form ulas. With this con ven tion, the sp ectra for n = 4 agree with the uniform n –b ody expressions. A.1.1 T ra jectories in the cen ter-of-mass frame F or the Hamiltonian ( 4 ) with coupling constan ts ( 6 ), the explicit solutions of Hamilton’s equations of motion, expressed in Cartesian co ordinates, are r 1 ( t ) = 1 2 r 13 (0) cos( ω t ) + r + 13 (0) cos(2 ω t ) + 1 4 mω 2 p 13 (0) sin( ω t ) + p + 13 (0) sin(2 ω t ) , r 2 ( t ) = 1 2 r 24 (0) cos( ω t ) + r + 24 (0) cos(2 ω t ) + 1 4 mω 2 p 24 (0) sin( ω t ) + p + 24 (0) sin(2 ω t ) , r 3 ( t ) = r 1 ( t ± 2 τ ) , r 4 ( t ) = r 2 ( t ± 2 τ ) , (17) with τ = π / (2 ω ) and where r + ij = r i + r j , p + ij = p i + p j . In the center-of-mass frame, r + 13 ( t ) = − r + 24 ( t ) and p + 13 ( t ) = − p + 24 ( t ). In ( 17 ), it is eviden t that only t wo frequencies are present: ω and 2 ω . This is a consequence of the exact separation of v ariables into t wo uncoupled commensurable harmonic oscillators. Hence, it corresp onds to a maximally sup erin tegrable system [ 22 ]. In general, ( 17 ) describ es t wo indep enden t 2-bo dy choreographies. Under sp ecial initial data, these (fragmen ted) motion merge into a single full 4-bo dy choreograph y . 37 A.2 Case n = 5 In tro duce the real discrete F ourier co ordinates u 0 u 1 u 2 u 3 u 4 = W r 1 r 2 r 3 r 4 r 5 , θ 5 = 2 π 5 , where W is the orthonormal 10 × 10 matrix W = 1 √ 5 1 √ 5 1 √ 5 1 √ 5 1 √ 5 q 2 5 q 2 5 c − 1 − q 2 5 c + 1 − q 2 5 c + 1 q 2 5 c − 1 0 √ c + 1 5 1 / 4 √ c − 1 5 1 / 4 − √ c − 1 5 1 / 4 − √ c + 1 5 1 / 4 q 2 5 − q 2 5 c + 1 q 2 5 c − 1 q 2 5 c − 1 − q 2 5 c + 1 0 √ c − 1 5 1 / 4 − √ c + 1 5 1 / 4 √ c + 1 5 1 / 4 − √ c − 1 5 1 / 4 . Eac h scalar entry multiplies the 2 × 2 identit y . The conjugate momenta transform iden tically , ( P 0 , . . . , P 4 ) ⊤ = W ( p 1 , . . . , p 5 ) ⊤ . In these u -co ordinates, the Hamiltonian ( 7 ) with coupling constants ( 9 ) becomes diagonal: H 5 = 1 2 m P 2 0 + P 2 1 + P 2 2 + P 2 3 + P 2 4 + 1 2 m ω 2 u 2 1 + u 2 2 + 4( u 2 3 + u 2 4 ) , (18) where u 0 represen ts the center-of-mass mo de and the pairs ( u 1 , u 2 ) and ( u 3 , u 4 ) span the tw o doubly degenerate in ternal frequency branc hes. A.2.1 T ra jectories in the cen ter-of-mass frame F or the Hamiltonian ( 7 ) with coupling constan ts ( 9 ), using the symmetry-adapted com binations r + i +1 ,i − 1 = r i +1 + r i − 1 , r + i +2 ,i − 2 = r i +2 + r i − 2 , (with all indices mo dulo 5) and the constants c ± 1 = 1 4 ( √ 5 ± 1) , the general tra jectories in the cen ter–of–mass frame take the form 38 r i ( t ) = 2 5 h r i (0) + c + 1 r + i +1 ,i − 1 (0) − c − 1 r + i +2 ,i − 2 (0) i cos( ω t ) + 2 5 h r i (0) − c − 1 r + i +1 ,i − 1 (0) + c + 1 r + i +2 ,i − 2 (0) i cos(2 ω t ) + 2 5 m ω h p i (0) + c + 1 p + i +1 ,i − 1 (0) − c − 1 p + i +2 ,i − 2 (0) i sin( ω t ) + 1 5 m ω h p i (0) − c − 1 p + i +1 ,i − 1 (0) + c + 1 p + i +2 ,i − 2 (0) i sin(2 ω t ) . (19) i = 1 , 2 , 3 , 4 , 5. This describ es a sup erposition of a fundamental mo de of frequency Ω 1 = ω and its second harmonic Ω 2 = 2 ω . Again, a maximally sup erintegrable system. This describ es a superp osition of a fundamental mode of frequency Ω 1 = ω and its second harmonic Ω 2 = 2 ω . F or this coupling choice the relative dynamics is fully resonan t (hence p eriodic). F or n = 4, the internal motion is carried by a single D 4 doublet (together with the Nyquist mo de when it is excited). Generic initial phases in the doublet pro duce a (2+2) dimer split, while a distinguished quadrature phase-lo c king yields a gen uine four–b ody c horeography (Section 4.3.1 ). When the Nyquist mo de is also active, C 4 phase matc hing imp oses the additional 1:2 lo c king that selects the lima¸ con family discussed in Section 4.1 . By contrast, for n = 5 there is no symmetry–protected lo wer–order choreograph y: dimers are symmetry–forbidden and any fragmented motion requires additional res- onance and phase-matc hing constraints. In particular, a full five–bo dy choreograph y exists only at the sp ecial resonance Ω 2 = 2 Ω 1 . A.3 Case n = 6 W e no w turn to the six–b ody case n = 6, where the in ternal dynamics decomp oses in to three inequiv alen t symmetry sectors: t wo tw o–dimensional irreducible representations corresp onding to angular indices ℓ = 1 , 2, and the nondegenerate Nyquist mo de ℓ = 3. The asso ciated normal–mo de frequencies Ω ℓ are determined b y the three indep endent coupling constants κ (6) 1 , κ (6) 2 , and κ (6) 3 through the relation ( ?? ) of the main text. T o make this structure explicit, we introduce symmetry–adapted orthonormal F ourier co ordinates that diagonalize the quadratic D 6 –in v ariant Hamiltonian. The resulting normal–mo de representation provides a conv enient starting p oin t for the explicit construction of six–b ody tra jectories, including full choreographies, frag- men ted motions, and reduced–subspace solutions. 39 Let θ j = 2 π 6 ( j − 1). Define the orthonormal F ourier coordinates u 0 = 1 √ 6 6 X j =1 r j , u cℓ = q 1 3 6 X j =1 r j cos( ℓ θ j ) , u sℓ = q 1 3 6 X j =1 r j sin( ℓ θ j ) , ℓ = 1 , 2 , u c 3 = 1 √ 6 6 X j =1 ( − 1) j − 1 r j . In these co ordinates, the Hamiltonian ( 11 ) b ecomes H 6 = 1 2 m X α P 2 α + 1 2 m Ω 2 1 ( u 2 c 1 + u 2 s 1 ) + Ω 2 2 ( u 2 c 2 + u 2 s 2 ) + Ω 2 3 u 2 c 3 , α = 0 , c 1 , c 2 , c 3 , s 1 , s 2. Even tually , real-space motion (tra jectories) are reconstructed via r i ( t ) = 2 X ℓ =1 q 1 3 h A ℓ cos(Ω ℓ t ) + B ℓ m Ω ℓ sin(Ω ℓ t ) i cos( ℓ θ i ) + 1 √ 6 h A 3 cos(Ω 3 t ) + B 3 m Ω 3 sin(Ω 3 t ) i ( − 1) i − 1 . Here A ℓ = u ℓ (0) and B ℓ = p ℓ (0) determine the planar amplitudes and phases. A.4 General n > 6 Define the real symmetry–adapted normal co ordinates u cℓ = r 2 n n X i =1 r i cos q ℓ ( i − 1) , u sℓ = r 2 n n X i =1 r i sin q ℓ ( i − 1) , with wa ve num b ers q ℓ = 2 πℓ/n and ℓ = 1 , . . . , ⌊ ( n − 1) / 2 ⌋ . F or even n , there is in addition the nondegenerate Nyquist co ordinate u N y = 1 √ n n X i =1 ( − 1) i − 1 r i . In these co ordinates, the quadratic D n –in v ariant Hamiltonian with p otential ( ?? ) separates into a collection of uncoupled planar harmonic oscillators. Each normal co ordinate evolv es according to ¨ u cℓ + Ω 2 ℓ u cℓ = 0 , ¨ u sℓ + Ω 2 ℓ u sℓ = 0 , 40 and, for even n , ¨ u N y + Ω 2 N y u N y = 0 . The corresp onding solutions are u cℓ ( t ) = A cℓ cos(Ω ℓ t ) + B cℓ m Ω ℓ sin(Ω ℓ t ) , u sℓ ( t ) = A sℓ cos(Ω ℓ t ) + B sℓ m Ω ℓ sin(Ω ℓ t ) , and, when present, u N y ( t ) = A N y cos(Ω N y t ) + B N y m Ω N y sin(Ω N y t ) . Reconstruction of the real–space tra jectories yields r i ( t ) = r 2 n ⌊ ( n − 1) / 2 ⌋ X ℓ =1 h u cℓ ( t ) cos q ℓ ( i − 1) + u sℓ ( t ) sin q ℓ ( i − 1) i , i = 1 , . . . , n, with the additional Nyquist contribution for ev en n , r i ( t ) 7→ r i ( t ) + ( − 1) i − 1 √ n u N y ( t ) . 41
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment