A Survey on Reconfigurable and Movable Antennas for Wireless Communications and Sensing
Reconfigurable antennas (RAs) and movable antennas (MAs) have been recognized as promising technologies to enhance the performance of wireless communication and sensing systems by introducing additional degrees of freedom (DoFs) in tuning antenna rad…
Authors: Wenyan Ma, Lipeng Zhu, Yanhua Tan
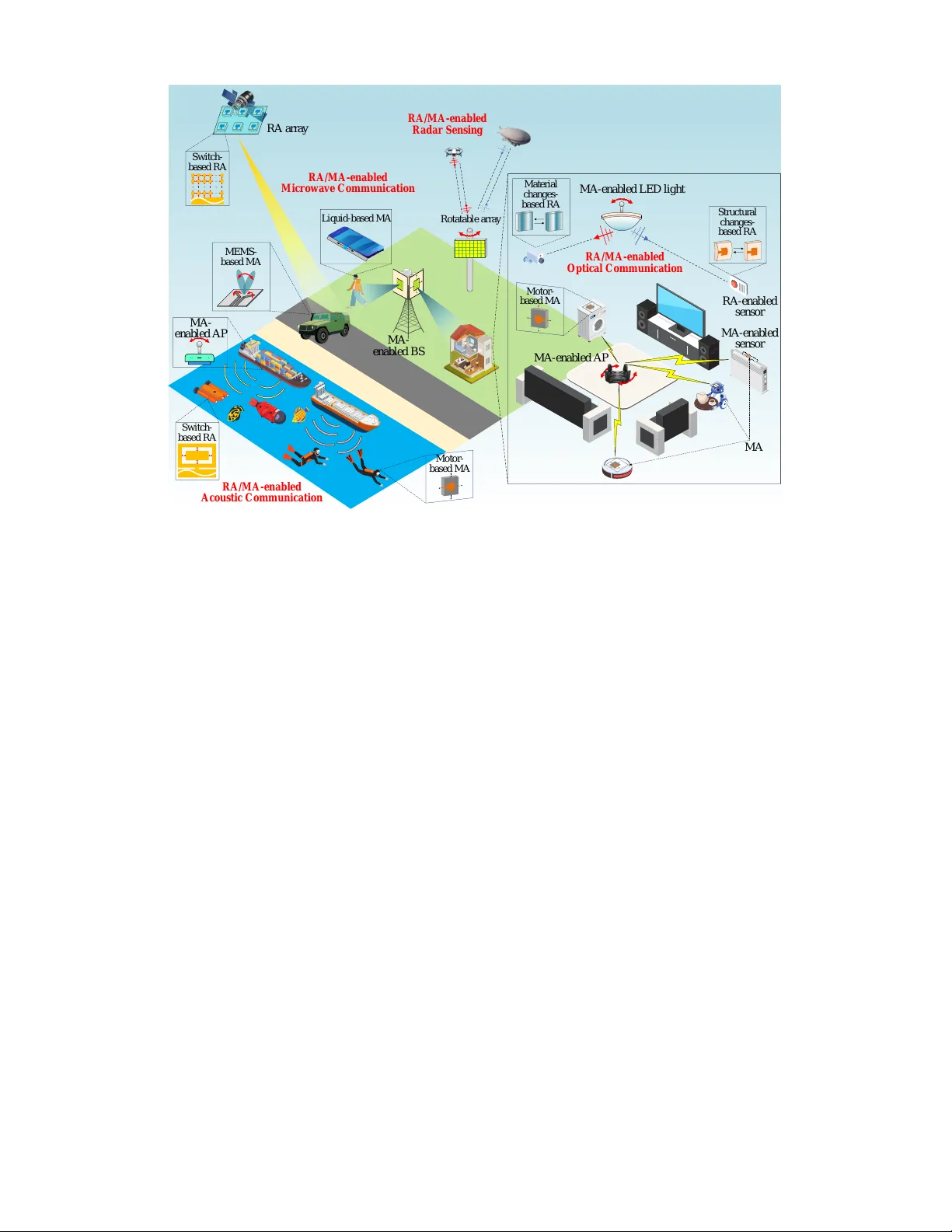
1 A Surv e y on Reconfigurable and Mo v able Antennas for W ireless Communications and Sensing W enyan Ma, Graduate Student Member , IEEE, Lipeng Zhu, Member , IEEE, Y anhua T an, Beixiong Zheng, Senior Member , IEEE, Y ujie Zhang, Member , IEEE, Y uchen Zhang, Member , IEEE, K eke Y ing, Zhen Gao, Member , IEEE, He Sun, Member , IEEE, Xiaodan Shao, Member , IEEE, Zhenyu Xiao, Senior Member , IEEE, Dusit Niyato, F ellow , IEEE, and Rui Zhang, F ellow , IEEE Abstract —Reconfigurable antennas (RAs) and mov able an- tennas (MAs) hav e been recognized as pr omising technologies to enhance the performance of wireless communication and sensing systems by introducing additional degrees of fr eedom (DoFs) in tuning antenna radiation and/or placement. This paradigm shift from con ventional non-r econfigurable/movable antennas offers tr emendous new opportunities for realizing multi- functional, more adaptive, and efficient next-generation wireless networks. In this paper , we provide a comprehensive survey on the fundamentals, ar chitectures, and applications of these tw o emerging antenna technologies. First, we provide a chronological over view of the parallel historical development of both RA and MA technologies. Next, we re view and classify the state-of-the-art hardwar e architectures f or implementing RAs and MAs, followed by a detailed comparison of their distinct mechanisms, perfor - mance metrics, and functionalities. Subsequently , we focus on various applications of RAs and MAs in wireless communication systems, analyzing their respectiv e performance advantages and key design considerations such as mode selection, movement optimization, and channel acquisition. W e also explore the significant roles of RAs and MAs in advancing wireless sensing and integrated sensing and communication (ISA C). Furthermore, we present numerical performance comparisons to illustrate the distinct characteristics and complementary advantages of RA and MA systems. Finally , we outline key challenges and identify promising future research directions to inspire further innovations in this burgeoning field. W . Ma, L. Zhu, H. Sun, and R. Zhang are with the Department of Electrical and Computer Engineering, National University of Singa- pore, Singapore 117583 (e-mail: wenyan@u.nus.edu, lipzhu@outlook.com, sunele@nus.edu.sg, elezhang@nus.edu.sg). Y . T an and B. Zheng are with the School of Microelectronics, South China University of T echnology , Guangzhou 511442, China (e-mail: tanyan- hua06@163.com, bxzheng@scut.edu.cn). Y . Zhang is with the School of Electrical and Electronic Engineer- ing, Nanyang T echnological Univ ersity , Singapore 639798 (e-mail: yu- jie.zhang@ntu.edu.sg). Y . Zhang is with the Electrical and Computer Engineering Program, Computer , Electrical and Mathematical Sciences and Engineering (CEMSE), King Abdullah Univ ersity of Science and T echnology (KA UST), Thuwal 23955-6900, Kingdom of Saudi Arabia (e-mail: yuchen.zhang@kaust.edu.sa). K. Y ing and Z. Gao are with the School of Information and Electronics, Beijing Institute of T echnology , Beijing 100081, China, also with the MIIT Ke y Laboratory of Complex-Field Intelligent Sensing, Beijing Institute of T echnology , Beijing 100081, China, also with the Y angtze Delta Region Academy of Beijing Institute of T echnology (Jiaxing), Jiaxing 314019, China, and also with the Advanced T echnology Research Institute of Bei- jing Institute of T echnology , Jinan 250307, China (e-mail: ykk@bit.edu.cn, gaozhen16@bit.edu.cn). X. Shao is with the Department of Electrical and Computer Engineer- ing, University of W aterloo, W aterloo, ON N2L 3G1, Canada (e-mail: x6shao@uwaterloo.ca). Z. Xiao is with the School of Electronic and Information Engineering, Beihang University , Beijing, China 100191. (e-mail: xiaozy@buaa.edu.cn). D. Niyato is with the College of Computing and Data Science, Nanyang T echnological Uni versity , Singapore 639798 (e-mail: dniyato@ntu.edu.sg). Index T erms —Reconfigurable antenna (RA), movable antenna (MA), wir eless communication, wireless sensing, integrated sens- ing and communication (ISA C), hardwar e architecture. I . I N T RO D U C T I O N A. Backgr ound During the past fe w decades, wireless communication tech- nology has been rapidly transforming, driv en by increasing connectivity demands and novel applications. The foundations of multiple-input multiple-output (MIMO) technology , which underpin these advancements, were established in seminal works exploring its capacity and practical implementation [1]– [5]. Cellular networks evolv ed from voice-centric systems to the versatile fifth generation (5G), providing enhanced mobile broadband (eMBB), ultra-reliable low-latenc y communication (URLLC), and massiv e machine type communication (MTC) [6]–[14]. A key 5G enabler is massive MIMO (mMIMO), deploying significantly more base station (BS) antennas (tens to hundreds) than prior generations. This facilitates precise beamforming, spatial multiplexing, and improved spectrum efficienc y [15], [16]. Sixth generation (6G) networks, envi- sioned to be launched around 2030, target the capabilities of terabit-per-second (Tbps) rates, sub-millisecond latency , native artificial intelligence (AI), and integrated sensing and commu- nication (ISAC) [17]–[24]. Realizing these goals, particularly using high-bandwidth millimeter-w av e (mmW ave) [25]–[27] and terahertz (THz) frequencies [28], [29], likely requires ev en extremely large-scale MIMO (XL-MIMO) [30]–[32] to counteract path loss and form ultra-narrow beams [ 33]. Parallel ev olution occurs in wireless local area networks (WLANs). Standards like IEEE 802.11ac (Wi-Fi 5) [34], 802.11ax (W i- Fi 6/6E) [35], and the emer ging 802.11be (W i-Fi 7) [36] boost throughput and ef ficiency , notably via multiuser MIMO (MU- MIMO) by leveraging more access point (AP) antennas for simultaneous device connectivity and interference mitigation in dense user settings. Overall, wireless communication ev olu- tion increasingly le v erages more antennas to enhance capacity , cov erage, and efficiency . Concurrently , wireless systems are increasingly used for sensing the surrounding environment [37], [38]. W ireless sens- ing uses electromagnetic (EM) wav es for applications span- ning from f ar-field detection, localization, and tracking to near - field imaging and fine-grained en vironmental/physiological monitoring. Modern radar systems often employ phased ar- rays, using multiple antennas for electronic beam scanning 2 [39], [40]. The evolution to digital MIMO radar using multiple transmit and receive antennas marked a significant advance. MIMO radar greatly enhances spatial resolution, parameter identifiability , and interference suppression through waveform div ersity and spatial di versity from equipping more antenna elements. Employing more antennas in sensing apertures is crucial for the high resolution required by applications like autonomous driving and advanced surveillance [41]. Further- more, exploring higher frequencies (mmW ave and THz) be- yond traditional micro wa ve bands of fers larger bandwidths for finer range resolution. Howe ver , higher frequencies often de- mand lar ger antenna arrays to form high-gain beams, ov ercome propagation losses, and achiev e sufficient angular resolution despite smaller element sizes. Thus, similar to communication systems, advanced wireless sensing increasingly relies on deploying more antennas and associated radio frequenc y (RF) chains. The ev olution from 5G mMIMO to the anticipated require- ments of 6G necessitates further exploitation of the spatial domain, as time-frequency resources are limited. This thus motiv ates the de velopment of XL-MIMO systems to coun- teract path loss and form ultra-narrow beams, particularly at higher frequencies [30]–[32]. While the deployment of such XL-MIMO systems enhances communication and sensing performance, it also amplifies critical system-level challenges: • Signal Processing Overhead: While large arrays theo- retically boost spectral efficiency via spatial multiplexing and/or beamforming, practical gains are often limited by ov erhead from the increasingly high-dimensional signal processing. Accurate channel state information (CSI) acquisition for massive antennas demands substantial pi- lot/feedback signaling, consuming time-frequency blocks and reducing network spectral ef ficiency [15], [16]. In multi-cell systems, pilot contamination worsens with mMIMO, thereby hindering performance gain and inter- ference mitigation. Furthermore, the complexity of high- dimensional resource allocation in the spatial domain can be prohibitive, potentially causing suboptimal spectrum utilization. • Energy Consumption: System energy consumption, par- ticularly at the infrastructure (e.g., communication BSs and radars), scales significantly with the number of ac- tiv e antennas associated with power amplifiers [1], [2]. For fully-digital systems, each antenna typically needs a dedicated RF chain with power-hungry components. Consequently , RF front-end power consumption increases linearly with the number of antennas. Moreov er , real- time baseband processing energy for channel estimation and precoding/combining escalates dramatically , requir- ing powerful and energy-intensi ve processors. Managing the thermal load from numerous activ e components also increases energy demands of cooling systems. • Hardware Complexity and Cost: Integrating numerous antennas, RF chains, and interconnections into compact, practical form factors faces significant hurdles in size, weight, wiring, and manufacturing tolerances. Achieving high accuracy demands precise calibration of all antenna elements/RF chains, which tends to be significantly more complex and sensiti ve to temperature/aging drift with ar- ray size. Mutual coupling also becomes more pronounced and difficult to mitigate [42]–[44]. Furthermore, the cu- mulativ e cost of numerous antennas, high-performance RF parts, fast data con verters, powerful processors, and complex integration/testing can be prohibitiv e for future wireless applications. Addressing these interconnected challenges in signal pro- cessing overhead, energy consumption, and hardware com- plexity is crucial for successfully deploying future large-array wireless systems. B. Emer ging Antenna T echniques and Motivation T o address the aforementioned challenges in large-scale antenna array-based wireless systems, se veral low-cost and energy-ef ficient antenna technologies have been developed. In particular , the high hardware complexity and power con- sumption associated with a large number of RF chains in mMIMO systems have moti vated the dev elopment of various antenna selection (AS) strategies [45], [46]. These strategies dynamically choose a subset of the av ailable antennas for operation, aiming to retain a significant portion of the mMIMO benefits while reducing the number of activ e antennas and the associated RF chains, thereby reducing cost and power consumption efficiently . In parallel, to reduce the number of activ e antennas while maintaining performance, thinned and sparse arrays have also been explored [47]–[51]. Another approach to reduce hardware complexity is beamspace MIMO, which utilizes lens antenna arrays to concentrate signal energy and thus reduces the number of RF chains and phase shifters [26], [52], [53]. While these techniques hav e advanced the state-of-the-art of MIMO, they often rely on fixed antenna structures and configurations that cannot fully adapt to dynamic en vironments and/or diverse function requirements of contemporary com- munication and sensing systems. The limitations of existing approaches further motiv ate the exploration of more adaptable and intelligent antenna technologies. There is a pressing need for low-cost and versatile antenna solutions that can dynami- cally adjust their characteristics to optimize performance met- rics such as capacity , reliability , energy ef ficiency , or sensing accuracy according to specific application requirements and prev ailing channel conditions. This need driv es the research into reconfigurable antennas (RAs) and mov able antennas (MAs). C. Intr oduction of RA and MA T o ov ercome the limitations of con ventional non- reconfigurable/mov able antennas and meet the demands of fu- ture wireless systems, RA and MA have emerged as promising paradigms offering enhanced degrees of freedom (DoFs) for system optimization [54]. 1) RA: The RA primarily focuses on dynamically altering the antenna’ s internal operational characteristics [55]. This 3 reconfiguration can be achieved through various means, in- cluding electrical switching (e.g., using PIN diodes and micro- electromechanical system (MEMS) switches), mechanical ad- justments (e.g., physical deformation), or by incorporating tunable materials (e.g., liquid crystals and ferrites) into the antenna structure [56], [57]. By manipulating these internal mechanisms, RAs can dynamically adjust one or more of their fundamental properties, including • F requency Reconfiguration: This capability allo ws an antenna to dynamically shift its operating frequency band or center frequency [58]–[62]. This pro vides versatility in multi-standard de vices and allows for cogniti v e radio ap- plications by selecting less congested frequency channels [63], [64]. • Radiation P attern Reconfiguration: This in v olv es altering the spatial distribution of the radiated power , effecti vely changing the antenna’ s beam shape or direction [65]–[67]. Such adaptability enhances signal directi vity , improves spatial filtering, and allows cov erage area adjustments [68]. • P olarization Reconfiguration: This refers to the ability to change the polarization state of the radiated EM wa ve, such as switching among linear vertical, linear horizontal, and circular polarizations (CPs) [69]–[72]. Polarization agility helps mitigate polarization mismatch losses between transmitter and receiv er , enhances di ver - sity reception in fading en vironments, and can improv e signal penetration or reduce specific types of interference. Besides, a prominent subclass of RAs aims to maximize spatial DoFs through nearly continuous apertures. This leads to the concept of continuous-aperture MIMO (CAP-MIMO) [73], which is also called holographic MIMO (HMIMO) [74], [75], large intelligent surface [76], or holographic surface [77], [78]. By designing radiation apertures that are nearly contin- uous rather than composed of discrete elements, CAP-MIMO potentially of fers the ultimate spatial resolution and beamform- ing capabilities. With recent advancements in metamaterials, intelligent reflecting surfaces (IRSs) or reconfigurable intelli- gent surfaces (RISs) [79]–[85] can be fabricated more cost- efficiently by integrating numerous low-cost passive elements. By controlling the phase shift imparted by each element, IRS can reshape the wireless propagation environment, reflecting incident signals towards desired receiv ers or away from non- intended receiv ers, thus enhancing communication links with- out introducing additional activ e antennas. Besides, dynamic metasurface antennas (DMAs) [86], [87] and reconfigurable holographic surfaces (RHSs) employ metamaterial elements as activ e radiators [88], [89]. These elements are closely packed to provide high aperture efficiencies and beamforming capa- bilities, eliminating the reliance on traditional phase shifters. RAs offer significant advantages ov er con ventional non- reconfigurable antenna technologies by providing versatility and adaptability . Compared to large phased arrays, a single RA element or a small-size RA array can potentially achieve div erse functionalities (such as beam steering and frequency tuning) with significantly reduced hardware complexity , cost, and power consumption. 2) MA: The MA introduces new spatial adaptability by dynamically altering the antenna’ s external properties, such as its physical position within a gi v en space [90]–[92]. In general, the three-dimensional (3D) position and 3D orientation of antennas can be both adjusted, also known as (a.k.a) six- dimensional MA (6DMA) [93]–[95]. This physical displace- ment is typically achieved using electromechanical systems such as motors, actuators, or MEMS integrated with the antenna element or sub-array . Specifically , 6DMA enables two categories of antenna reconfigurations, which are elaborated as follows [93]–[95]. • P osition Reconfiguration (T r anslation): This capabil- ity inv olv es physically changing the antenna’ s location within a one-dimensional (1D)/two-dimensional (2D)/3D space by mounting the antenna directly on motor-dri ven shafts or using MEMS [90]. This allows the antenna to dynamically seek locations with fav orable channel conditions (e.g., stronger signal or less interference), effecti v ely harnessing spatial channel variations for im- proving communication and sensing performance. • Orientation Reconfiguration (Rotation): This capability in v olves altering the antenna’ s pointing direction and/or boresight direction by changing its elev ation or azimuth angle, without significantly changing its central position [93]–[97]. Achieved through mechanical/electronic rota- tion or tilting mechanisms, it allows for fine-tuning the alignment of the antenna’ s main lobe towards a target or optimizing its polarization alignment relative to incoming signals. Orientation adjustments complement electronic beam steering and are crucial for optimizing links over large distances or in en vironments with specific angular requirements. Generally speaking, MAs provide a different approach to spatial adaptation. By physically relocating, MAs can po- tentially access spatial DoFs unav ailable to fixed antennas, leading to significant gains in signal strength, div ersity , and interference mitigation, especially in en vironments with strong spatial variations [91], [92]. MAs offer advantages over tra- ditional AS by providing a continuous or finely discretized set of locations/orientations rather than choosing from a few fixed options [91], [98], [99]. While mechanical movement is typically slower than electronic reconfiguration of RAs, the potential performance gains deriv ed from optimal positioning can be substantial, ev en for long-term performance optimized using statistical channel knowledge [93], [100], [101]. D. Contribution and Or ganization While sev eral revie w papers focus on RA [56], [57] or , more recently , on MA/6DMA/F AS [90], [102]–[106], this paper aims to provide a unified and comprehensiv e survey cov ering both RA and MA/6DMA technologies within a single framew ork, as the two technologies share a similar principle in reshaping wireless channels in the EM domain. Giv en the significant technical potential and broad application prospects of RA and MA/6DMA, this paper provides a comprehensi ve surve y on the fundamentals, architectures, and applications of these two promising antenna technologies, as well as 4 T ABLE I L I ST O F AC RO N Y MS . Acronyms Definition Acronyms Definition 1D One-dimensional L W A Leaky-wa ve antenna 2D T wo-dimensional MA Mov able antenna 3D Three-dimensional MEMS Micro-electromechanical system 5G Fifth generation MISO Multiple-input single-output 6G Sixth generation MIMO Multiple-input multiple-output 6DMA Six-dimensional movable antenna mMIMO Massiv e multiple-input multiple-output AI Artificial intelligence MRA Mov able and reconfigurable antenna AirComp Over -the-air computation MSE Mean square error AoA Angle-of-arriv al MTC Machine type communication AoD Angle-of-departure MU-MIMO Multiuser multiple-input multiple-output AP Access point MUSIC Multiple signal classification AS Antenna selection NEMS Nano-electromechanical system BS Base station NGMA Next-generation multiple access CAP-MIMO Continuous-aperture MIMO NLOS Non-line-of-sight CDF Cumulativ e distribution function NOMA Non-orthogonal multiple access CP Circular polarization OMP Orthogonal matching pursuit CRB Cram ´ er-Rao bound PCM Phase change materials CRLH Composite right/left-handed PIF A Planar inverted-F antenna CSI Channel state information PLS Physical layer security DC Direct current PRM P ath response matrix DGS Defected ground structures PU Primary user DMA Dynamic metasurface antenna RA Reconfigurable antenna DoF Degrees of freedom RCS Radar cross-section eMBB Enhanced mobile broadband RF Radio frequency EM Electromagnetic RHCP Right-hand circular polarization ESP AR Electronically steerable parasitic array radiator RIS Reconfigurable intelligent surface F AS Fluid Antenna Systems RP A Reconfigurable patch antenna FET Field-effect transistor RSMA Rate-splitting multiple access FP A Fixed position antenna RSS Recei ved signal strength FPGA Field-programmable gate array SA Sectorized antenna FRI Field response information SAR Synthetic aperture radar FR V Field response v ector SBA Switched-beam antenna FSO Free-space optical SE Spectral efficiency FSS Frequency selecti ve surface SIMO Single-input multiple-output GPS Global positioning system SINR Signal-to-interference-plus-noise ratio HMIMO Holographic MIMO SISO Single-input single-output i.i.d. Independent and identically distributed SNR Signal-to-noise ratio IMS Iterative mode search SWIPT Simultaneous wireless information and power transfer IRS Intelligent reflecting surface Tbps T erabit-per-second ISA C Integrated sensing and communication THz T erahertz LEO Lo w-earth orbit UA V Unmanned aerial vehicle LHCP Left-hand circular polarization UE User equipment LLM Large language model ULA Uniform linear array LoS Line-of-sight UP A Uniform planar array LP Linear polarization URLLC Ultra-reliable low-latency communication VGA V ariable gain amplifier WPT W ireless po wer transfer WLAN W ireless local area network WSN W ireless sensor network XL-MIMO Extremely large-scale MIMO ZF Zero-forcing their comparison. The main contributions of this paper are summarized as follows: • W e provide a comprehensi ve overvie w of the historical dev elopment of both RA and MA/6DMA technologies, tracing their parallel e volution within the antenna archi- tecture, communication, and sensing communities. • W e revie w and classify the state-of-the-art hardware ar- chitectures for implementing RA and MA/6DMA, cover - ing both element-level and array-lev el designs. A detailed comparison of their distinct mechanisms, performance metrics, and functionalities is also presented. • W e in vestigate the application of RA and MA/6DMA in wireless communication systems as well as analyze their respectiv e performance adv antages and key design considerations, including mode selection, mov ement op- timization, and channel acquisition. • W e e xplore the significant roles of RA and MA/6DMA in advancing wireless sensing and ISA C, highlighting their unique benefits and design trade-offs. • W e present numerical performance comparisons to il- lustrate the distinct characteristics and complementary strengths of RA and MA/6DMA systems in v arious communication and sensing scenarios. • W e outline key challenges and identify promising future research directions to inspire further innovations in this bur geoning field. The remainder of this paper is or ganized as follows. Section II provides a detailed re view of antenna architectures for both RA and MA/6DMA, covering their classification, implemen- tation methods, and design challenges, and concludes with a comparativ e analysis. Section III focuses on the application of RA and MA/6DMA in wireless communications, exam- ining their performance benefits and design methodologies. Section IV extends the discussion to wireless sensing and ISA C, reviewing RA- and MA/6DMA-enabled techniques and their integration. Section V outlines important future research directions. Finally , Section VI concludes the paper . The orga- nization of this paper is summarized in Fig. 1. The acronyms 5 I. Introduction II. Ant enna Architectu res III. RA and MA for Wireless Communications IV. RA and MA for Wirele ss Sensi ng and ISAC V. Future Works VI. Conclusi ons A. Backg round B. Existi ng Antenna Tec hniques and M otiv ati on C. Introducti on of RA and MA D. Contribut ion and Organ ization E. Histor ical Developm ent F. Applic ations A. RA A rchitectures B. MA A rchitectures C. Compari son of R A and MA A. RA for Wireless Communicat ions B. MA for Wi reles s Com munic ations C. Per formance Com parison A. RA f or W ireless Sensin g and ISAC B. MA for Wirel ess Sensi ng and ISAC C. Per formance Com parison A. Efficient Antenna A rchitectures B. Channel Esti m ation/Acqui sition for RA and MA sy s tems C. Lo w - c omple xity Antenna Config urati on/Mov ement Stra teg ies D. Syne rgy with Othe r Tec hnologi es and Application s Fig. 1. Organization of this paper . used in this paper are summarized in T able I. E. Historical Development The reconfigurable capabilities of antennas hav e been exploited to enhance wireless system performance almost throughout the history of communication and sensing tech- nologies. An early precursor to modern RAs emerged in the 1930s, in volving mechanically adjustable rhombic antennas, which, by modifying the wire geometry using motors and weights, effecti v ely steered the radiation beam in elev ation [107]. The term “reconfigurable antenna” gained formal trac- tion in 1979, characterized by the “ability to adjust beam shapes upon command” and demonstrated through a multi- beam system designed to dynamically alter coverage for satellite communications [108]. In 1989, the reconfigurable mesh reflector antennas were introduced for adaptiv e sidelobe nulling [109]. By dynamically adjusting the reflector’ s surface profile, these systems could generate deep radiation pattern nulls to suppress co-channel interference, thereby significantly enhancing signal quality while preserving main beam gain [110]. A significant step tow ards electronic control occurred in the mid-1990s with the practical application of semiconductor devices such as PIN diodes and varactor diodes. These compo- nents enabled the electronic switching and tuning of antenna elements and feeding networks, paving the way for frequency- RAs. This capability was particularly valuable for frequency- Chappe telegraph with thre e movable arms [11 8] Marconi’ s transatlantic radio transmission experiment with the antenna trailed by a kite Emergenc e of various directional antennas with r otatable mechanism [11 9 ] Emergence of MEMS - enabled antennas, liquid patch antennas, and smart arrays with tunable positions of antennas [11 2 ],[1 20 ],[12 1 ] First name “fluid antenna” [1 24 ] Define “movable an tenna” [1 23 ] Apply M A to radar systems [1 28 ] Red efine “fluid antenna system” and analyze wireless communication performance [1 29 ], [1 30 ] Introduce MA to wireless communications [1 26 ] Introduce pinching antenna to wireless communications [1 33 ] MA Mechanically adjustable rhom bic antennas for radiation direction reconfiguration [107] Define “ reconfigurable antenna” [ 108 ] Emergenc e of reconfigurable mesh reflector antennas [ 109 ] Emergenc e of semiconductor - enabled frequency RA [1 1 1] Emergence of MEMS - enabled frequency and pattern RA [112] Introduce tunable ma terial to R A design [1 13] Apply R A to radar systems [1 14 ] Introduce RA to wireless communications [1 15 ] Apply R A to cognitive radio systems [1 16 ] RA Y ear Propose field - response channel model and develop optimizati on framework for MA system s [ 91 ],[ 92 ] First appearance of “pinching antenna” [132] Define 6DMA and apply it to wireless communications [9 3 ], [ 94 ] 1789 1901 1999 2007 2008 2004 2015 2020 2009 1935 1979 1950 1989 1993 2001 2005 2022 2024 Investigation channel capacity by varying antenna locations [1 22 ] 2000 DMA [8 6] 2016 IRS [7 9] 2018 RIS [ 80 ], [ 81 ] 2019 RHS [8 9] 2021 HMIMO [7 4] Develop tractable mode l and optimization framew ork for rotatable antenna - aided wireless communications [9 6 ], [ 97 ] 20 25 Fig. 2. Illustration of the historical development of RA and MA. agile military systems, enhancing both communication link robustness and sensing applications such as frequenc y-hopping radar [111]. Further miniaturization and integration arriv ed in the late twentieth century , spurred by advances in MEMS [112]. This technology inspired the development of MEMS- integrated RAs capable of tuning both radiation patterns and frequency responses with greater precision and lower loss [112]. Alternativ e approaches using tunable materials also gained prominence starting in the early 2000s. Research explored materials like liquids and liquid metals whose EM properties could be altered, offering different mechanisms 6 MA - e na bl e d B S L i qui d - bas ed M A R A a r r a y M E M S - bas ed M A MA MA - e na bl e d AP MA - e na ble d LE D li ght MA - e na bl e d A P R ot at abl e a r r ay M ot or - bas ed M A Sw i t ch - bas ed R A Sw i t ch - bas ed R A M ot or - bas ed M A St r uct ur al c hange s - bas ed R A M at er i al c hange s - bas ed R A RA - e na bl e d se nsor MA - e na ble d se nsor RA / MA - e n ab l e d R ad ar S e n si n g RA / MA - e n ab l e d O p t i c al C om m u n i c at i on RA / MA - e n ab l e d A c ou st i c C om m u n i c at i on RA / MA - e n ab l e d M i c r ow ave C om m u n i c at i on Fig. 3. Application scenarios of RA/MA-aided wireless networks. RA and MA can be applied in various wireless communication and sensing scenarios, including microwa ve, optical, and acoustic communications, as well as radar , imaging, and wireless sensor systems. Dif ferent implementation approaches for antenna movement and reconfiguration can be adopted, depending on specific performance requirements and hardware constraints. for achieving antenna reconfigurability [113]. Since the early 2000s, frequency/radiation/polarization-RAs were e xplored for space-based radar [114] as well as to enhance spatial div ersity , reduce interference, or improv e capacity in MIMO commu- nication systems [115]. Around 2005, the rise of cognitive radio provided a strong impetus for RA dev elopment in communications. Cogniti ve radios require sensing the spectral en vironment and then adapting transmission parameters, in- cluding operating frequency , making frequency-RAs essential for realizing practical cognitiv e radio systems [116]. Since the mid-2010s, adv ancements in metamaterials hav e enabled ne w mechanisms for achie ving antenna reconfigurability , leading to the development of architectures such as HMIMO [74], IRS/RIS [79]–[81], DMA [86], and RHS [89]. In parallel, exploiting antenna movement to enhance wire- less system performance has an ev en longer history [117]. Early precursors include the Chappe telegraph’ s mechanical arms (1790s) for signaling [118] and Marconi’ s kite-to wed wire antenna for the first transatlantic radio reception (1901). Subsequently , directional antennas like Y agi and parabolic reflectors were often mounted on rotatable platforms for beam steering in communication and radar [119]. The late 20th century brought advances such as MEMS-enabled tunable antennas [112] and optimized element positioning in arrays [120], [121], further highlighting the benefits of adaptiv e configurations. A pi votal theoretical contribution emerged in 2000, which in vestig ated the optimization of multi-antenna channel ca- pacity by varying antenna locations [122]. Building on this legac y , the term “mov able antenna” was formally discussed in antenna monograph by 2007 [123]. Around the same time, the term “fluid antenna” emerged [124], initially describing antennas using liquid radiators [113], [125] but conceptually related to MA through potential material mov ement. T o the best of our knowledge, it was in 2009 when the first rigorous in vestig ation of MA-aided wireless communication systems was conducted [126], where the spatial diversity gain of a single receiv e MA was ev aluated based on spatial-correlation channel model under rich-scattering conditions. While antenna mov ement has long been integral to radar techniques like synthetic aperture radar (SAR) [127], with MA prototypes showing radar imaging benefits [128], its dedicated application in wireless communications saw less focus until recently . In 2020, the authors in [129], [130] e xpanded the definition of fluid antenna systems (F AS) to encompass any position- or shape-flexible antenna and analyzed the spatial di versity gain of a single receive fluid antenna using a simplified form of the spatial correlation channel model in [126] under the assumption of rich scattering. Follo wing its original defini- tion, the MA-aided wireless communication system with joint transmit and receiv e antenna 2D mov ement was inv estigated in 2022 [91], [92], which was then extended to 3D antenna mov ement in [90], [131]. By introducing the new antenna rotation DoF , 6DMA system was defined in 2024 to achiev e the highest fle xibility in antenna mo vement through integrating 3D position and 3D orientation/rotation adjustments [93]– [95], thus achieving further significant capacity enhancement without increasing or even reducing the number of antennas. In late 2024 and 2025, rotatable antenna technology [96], [97] emerged as a ne w v ariant that focuses solely on antenna bore- 7 sight rotation flexibility (with fixed antenna position), of fering a cost-effecti ve and compact solution regarded as a simplified yet promising subset of MA/6DMA. Moreov er , the pinching antenna, introduced in 2022, enables antenna movement or positioning by allowing radio wav es to be radiated from arbi- trary points along a dielectric wav eguide [132]. Since 2024, the pinching antenna has been applied to various communi- cation scenarios, including single-input single-output (SISO), non-orthogonal multiple access (NOMA), and multiple-input single-output (MISO) communication systems [133]–[137]. Despite distinct origins and different implementation methods, MA, F AS, and pinching antenna share fundamentally similar principles of flexible antenna positioning, and they have at- tracted growing interest in the communication community in recent years [117]. The historical development of RA and MA technologies is summarized in Fig. 2. F . Applications By le veraging reconfigurable radiation characteristics via RAs and adaptive antenna mov ement via MAs, these antenna technologies offer significant opportunities to enhance the antenna flexibility , performance, and efficienc y across v arious communication and sensing applications. The ability of RA or MA to dynamically alter antenna’ s internal or external properties unlocks new DoFs compared to con ventional an- tenna systems. As shown in Fig. 3, RA and MA can be applied jointly or individually to improve system capabilities in various wireless communication and sensing scenarios. 1) Micr owave Communications: Conv entional microwa ve communication systems often employ fix ed and non- reconfigurable antennas, limiting their ability to adapt to dynamic channel conditions caused by mobility , obstructions, and/or en vironmental changes. This can lead to suboptimal link quality and inefficient spectrum utilization. In contrast, RA systems can electronically steer beams or change po- larization to optimize links, while MA systems add the ca- pability to physically reposition or reorient antennas. The adaptability of RA and MA allo ws for precise beam alignment, enhanced channel gain, and effecti ve interference mitigation in microw av e links, improving throughput and reliability even in challenging propagation en vironments [92]–[95], [131], [138]–[142]. Moreover , for low-earth orbit (LEO) satellites, implementing reconfigurable array geometries at the satellites or ground stations facilitates more adaptable beamforming, leading to enhanced coverage and interference suppression for terrestrial users [143]–[145]. F or unmanned aerial vehicles (U A Vs), the platform’ s inherent large-scale mobility can be lev eraged alongside MAs to ensure robust, uninterrupted 3D connectivity between aerial and ground-based communication systems [146]–[148]. 2) Optical Communications: Free-space optical (FSO) communication relies on highly directional beams, making beam alignment critical and susceptible to atmospheric turbu- lence, building sway , and/or platform vibrations. Traditional FSO systems often use comple x and slow mechanical gimbals for alignment. RA techniques can offer faster beam steer- ing capabilities, while MA can precisely adjust the antenna (optical transceiver) position and/or orientation to maintain optimal alignment and maximize received power [90], [149]. Using RA for beam steering and using MA for position and/or orientation alignment can significantly improv e link stability , reduce pointing errors, and enhance the throughput of FSO systems, especially for mobile platforms or long-distance links. 3) Acoustic Communications: Underwater or through- medium acoustic communication faces challenges like sev ere multipath propagation, limited bandwidth, and slow sound speed, making reliable communication difficult with con- ventional antenna systems. RA could enable tunable beam patterns or operating frequencies, while MA can exploit spatial div ersity and find locations with f av orable channel conditions, mitigating multipath fading and improving the signal-to-noise ratio (SNR) [150], [151]. The adoption of RA or MA allows acoustic communication systems to adapti vely optimize trans- mission and reception, enhancing data rates, reliability , and range in complex underwater or reverberant environments. 4) Radar: Radar systems with con ventional non- reconfigurable/mov able antennas/arrays have limitations in terms of spatial resolution and interference mitigation, typically requiring a large number of antennas to achieve high performance. RA can provide adaptable beam shapes, while MA can reconfigure the array geometry dynamically . By optimizing antenna positions, MA arrays can synthesize a larger virtual aperture than the physical array size, significantly enhancing angular resolution and target detection capabilities without increasing the antenna number [152]–[154]. RA/MA radar systems can adapt their configuration for dif ferent tasks, suppress clutter and interference more effecti vely , and achie ve higher resolution compared to con v entional antenna-based radars. Moreov er , MAs are a ke y enabling technology for ISA C, improving both sensing accuracy and communication performance. By reconfiguring antenna positions, ISA C systems can flexibly manage the trade-off between communication quality and sensing precision, thereby adapting to varying operational requirements [146], [155]–[163]. 5) Imaging: Microwa v e or mmW ave imaging systems often suffer trade-offs among resolution, field-of-view , and system complexity when using con ventional antenna arrays. RA al- lows for scanning beams or adapting patterns electronically . MA enables the physical reconfiguration of the imaging array , potentially creating sparse array configurations with optimized antenna positions for specific imaging tasks [166]. This can achiev e high resolution over a wide area with fewer antennas than a dense array with fixed-position antennas (FP As), re- ducing system cost and complexity . By dynamically adjusting antenna positions for MA-enabled systems or radiation pat- terns for RA-enabled systems, imaging systems can adapt to different scenes, improve image quality , suppress artifacts, and offer enhanced capabilities for applications such as security screening, medical imaging, or non-destructi ve testing. This is conceptually similar to SAR [127] while allowing for more flexible and real-time aperture synthesis. 6) Sensors: W ireless sensor networks (WSNs) often deploy sensors with FP As, which may not be optimally positioned for 8 Varactor PIN diode (a) (b) Liquid metal (c) Fig. 4. Classification and architectures of RAs. (a) Frequency-RA with continuous frequency tuning capability [61]; (b) Pattern-RA with 3D beamforming capability [164]; (c) Polarization-RA with multi-polarization generation capability [165]. communication links or sensing tasks, especially in dynamic en vironments. RA can allow sensor nodes to adapt their com- munication patterns, while MA permits physical repositioning to improv e link quality to data sinks or optimize sensing cov erage for specific phenomena [167], [168]. For distributed sensing tasks, MA-enabled sensors could coordinate their positions to form optimal geometries for source localization or environmental field mapping. The adaptability provided by RA and MA enhances the resilience, efficienc y , and sensing accuracy of WSNs, particularly for mobile sensors or applica- tions requiring targeted monitoring in complex terrains. I I . A N T E N NA A R C H I T E C T U R E S A. RA Arc hitectur es 1) Reconfigurable Antenna-Element: An RA is well known as a single antenna element capable of dynamically changing its operating parameters, such as radiation pattern, operating frequency band, and polarization, to better adapt to different wireless channels [55], [56], [169]. Compared to traditional phased arrays, which require multiple expensi ve RF chains and phase shifters, RAs offer a low-cost and compact alter- nativ e. Moreover , unlike con ventional antenna elements with fixed characteristics, RA provides more design freedom and div ersity to wireless systems. These advantages have led to growing interest in the application of RAs in modern wireless systems. Designing an RA is not just about making a single antenna. It in v olves creating multiple functions/antennas and combining them in one structure. In addition, designing RAs in v olves applying knowledge from antenna theory , RF and direct cur- rent (DC) circuits, and tunable materials. These make RA design a wide and promising research area. In this subsection, we revie w the current progress of RAs, with a focus on their classification, reconfiguration methods, and key design challenges. a) Classification: In terms of the reconfigurable param- eters, RA can be classified into pattern-RA, frequency-RA, and polarization-RA. Some representativ e RA architectures and performance are shown in Fig. 4. P attern-RA : Representati ve methods for realizing pattern-RAs include pixelated surf aces [65], [164], [170]–[174], electronically steerable parasitic array radiators (ESP AR) [68], [175]–[178], reconfigurable metasurfaces/metamaterials/frequency selecti ve surface (FSS) [179]–[183], and selected driven antennas [184]– [187]. Although pixelated surfaces and reconfigurable metasurfaces/metamaterials share similar principles, they are distinguished in this paper based on the activeness of the radiating elements and the adopted design methodology . A pixelated surface specifically refers to a structure in which the radiating aperture is discretized into small metallic elements. A pixelated surface realizes its functionality by electrically connecting or disconnecting these discrete metallic pixels, thereby modifying the antenna topology and the associated surface current distributions. In contrast, reconfigurable metasurfaces and metamaterials achieve reconfiguration by tuning the EM properties of individual subwav elength unit cells, rather than by electrically connecting different cells. This enables controlled manipulation of wav e propagation and scattering through engineered ef fecti ve material responses. The key design strategy lies in manipulating the current distribution on the antenna’ s radiating aperture. Currently , most single-port pattern-reconfigurable antennas can only provide a limited number of reconfigurable patterns in a 1D elev ation or azimuth plane. For future designs, enhanced beamforming capabilities, such as 2D or ev en 3D beam-steering or beamforming, are desirable [164]. Highly pattern-reconfigurable antenna offers increased design freedom for wireless systems. Additionally , dev eloping compact multi-port pattern-RAs with independent beam control at each port is highly promising and can directly enhance channel capacity in wireless communications [65]–[67]. F requency-RA : The most common approach for designing frequency-RAs is to use tunable materials for adjusting the effecti v e antenna dimensions (i.e., resonant current path), thereby shifting the resonant frequenc y [58]–[62]. This can be achiev ed by extending the antenna length with liquid metal, 9 T ABLE II K E Y C HA R AC T E RI S T I CS O F R EP R E S EN TA T IV E R E C ON FI G U RA B L E D E VI C E S A ND M A T ER I A L S U SE D I N R A S . Reconfigurable Methods T uning T ype T uning Speed T uning V oltage Power Consumption Applied Frequency PIN Diode Discrete Fast (ns) Lo w Moderate Low to moderate V aractor Continuous Fast (ns) High Low Low MEMS Discrete/Continuous Moderate (µs ∼ ms) High Low Low to high Liquid Metal Continuous Slow (ms ∼ s) High High Lo w to high Liquid Crystal Continuous Slow (ms ∼ s) Low Low High Mechanical Movement Discrete/Continuous Slow (ms ∼ s) High High Lo w to high altering the substrate’ s dielectric constant using liquid crystal, or loading parasitic elements with PIN diodes or varactors. These methods typically allow up to 50% frequency tuning. T o surpass this limit, designs that switch between distinct radiating modes with widely separated resonant frequencies can be employed. A recent example achiev es a 83% tuning range by switching between planar in verted-F antenna (PIF A) and patch modes, as reported in [188] and [189]. P olarization-RA : The key for designing polarization-RAs is exciting orthogonal modes and controlling their phase differences. This can be achieved in various ways, for ex- ample, using etched slots on the radiating patch to con vert linear polarization (LP) to CP [69], employing reconfigurable defected ground structures (DGS) to switch between right- hand CP (RHCP) and left-hand CP (LHCP) [70], or adopting rotationally symmetric geometries to realize multiple linear polarizations [190]. Continuous LP reconfiguration is also possible by tuning the relativ e amplitude of the orthogonal modes with tunable materials [165]. Since the three RA parameters are independent, they can be jointly designed to create multi-functional antennas [115], [191]–[196]. This represents a more advanced form where multiple antenna properties (e.g., frequency and pattern, or pattern and polarization) are adjusted simultaneously or se- quentially [196], [197]. It provides enhanced flexibility by allowing the antenna to adapt to complex operating scenarios requiring optimization across sev eral domains. Compound re- configuration enables syner gistic benefits, such as concurrently tuning to the best frequency band while steering the beam tow ards the intended user for optimal link quality . b) Reconfigurable Methods: Beyond antenna structure design, the choice of reconfiguration method is also critical. In many cases, the reconfigurable material determines the performance limits of the antenna. In the following, we revie w some of the most commonly used reconfigurable de vices and materials. Semiconductor Diode : PIN diodes and v aractor diodes are the most commonly used devices in RAs. They can change the antenna’ s performance by providing dif ferent impedance values. A PIN diode acts like an RF switch. Its ON/OFF states work like a short or open circuit. PIN diode responds very fast with several nanoseconds switching speed. It only needs a small DC voltage to operate and is very compatible with digital controllers like field-programmable gate arrays (FPGAs) [198]. V aractor diodes offer continuous tuning by changing their reactance, which allows more precise control. For antenna design, a wide reactance tuning range in varactors is especially useful [199]. Driven by the laser , photodiode can also be utilized when the diode numbers are externally large. This could help remov e the massi ve DC bias lines placed near the antenna geometry [200]. Liquid Metal : Liquid metal, such as mercury (Hg), is a fluidic conductiv e material whose position can be controlled using microfluidic channels and micropumps [201]–[204]. One major adv antage is its high conducti vity , which results in very low loss. It can act directly as the antenna radiator and offer great tuning flexibility . Liquid metal performs well in higher frequency bands due to its high electrical conductivity and the resulting lower insertion loss compared to semiconductor switches in mmW ave and THz frequency bands. Howe v er , the main challenges of liquid metal are the complexity of the supporting systems, such as the microfluidic channels and pumps, which are difficult to integrate into antenna designs. Additionally , the slow mov ement speed of the fluid may limit the performance of wireless communication systems. Liquid Crystal : Liquid crystal is a special material whose effecti v e permittivity can be tuned by rotating its rod-like molecular structure. It is commonly used as a continuously tunable phase shifter in RA or reflect-array designs [205]– [207]. Due to its limited permittivity tuning range and thin thickness, it is typically used at very high frequencies (e.g., mmW av e/THz) [208]. Mechanical Movement : RF MEMS switches are among the most widely used technologies in RA design [209]–[211]. Compared to other switching devices such as PIN diodes and field-effect transistors (FETs), MEMS switches offer superior performance in terms of insertion loss, isolation, and power consumption. Other mechanical methods include reconfig- urable aperture antennas that use actuators to physically adjust the antenna structure [212] and [213]. It is worth noting that although MEMS-based RAs typically require relativ ely high tuning voltages, the corresponding tuning current is almost zero. As a result, their power consumption remains very low , which is fundamentally different from mechanical mo vement- based reconfiguration methods, where the power consumption remains relativ ely high during mechanical movement. There are also many other reconfigurable methods that can be utilized in RA design, such as origami [214], phase change materials (PCM) [215], and shape memory alloy [216], etc. A performance summary table is giv en in T able II. c) Design Challenges and P ossible Solutions: Despite years of research on RA, many fundamental scientific prob- lems remain open and continue to attract academic interest. In the following, we highlight some key design challenges and potential solutions. New RA Geometry Design : Most previous RA designs are 10 An t e nna a rra y ( e ) ( d ) ( a ) ( b ) ( c ) F ul l y c onn e c t e d h ybr i d be a m f or m i ng A na l og be a m f or m i ng D i gi t a l be a m f or m i ng P a r t i a l l y c onn e c t e d hy br i d be a m f or m i ng Ba s e - ba nd s i gna l pr oc e s s i ng R F c h a i n R F c h a i n R F c h a i n R F c h a i n Ba s e - ba nd s i gna l proc e s s i ng R F c h a i n A na l og s i gna l proc e s s i ng Ba s e - ba nd s i gna l pro c e s s i ng R F c h a i n A na l og s i gna l pro c e s s i ng R F c h a i n Ba s e - ba nd s i gna l proc e s s i ng R F c h a i n R F c h a i n A na l og s i gna l proc e s s i ng F e e d O bj e c t w a ve R e f e r e nc e w a ve s R F s w i t c h B a s e - ba nd s i gna l pr oc e s s i ng R F c h a i n R F c h a i n R F c h a i n R F c h a i n AS C S I S e l e c t e d a nt e nna U ns e l e c t e d a nt e nna H M I M O D M A IRS c ont rol l e r R e f l e c t i n g e l e m e n t / m e t a - a t o m Eq u i v a l e n t c i r c u i t On O ff I R S A n al og / D i gi t al / H yb r i d B e am f or m i n g AS M e t a m a t e r i a l e l e m e n t D i o d e F e e d W a ve gui de O bj e c t w a ve R e f e r e n c e w a v e s S u b s t r a t e A nt e nna e l e m e nt s T u n i n g e l e m e n t s A na l og s i gna l pro c e s s i ng An t e nna a rra y S uba rra y An t e nna a rra y S uba rra y Fig. 5. Illustration of typical reconfigurable methods for RA arrays. single-port. Multi-port multi-mode RA designs are highly promising for wireless systems, as increasing the number of ports within a given area can directly improve data rates. Howe v er , the design process of multi-port multi-mode RAs is highly challenging. It requires independent control of the antenna parameters at each port while maintaining a high lev el of port isolation. A promising approach to address this challenge is to deeply integrate microwa ve theories, such as multi-port theory , RF circuit theory , and characteristic mode theory , into the antenna design process [65], [66], [67]. Reconfigurable Material : Reconfigurable materials are key components in RA design. Currently , PIN diodes and varac- tors are the most commonly used tunable materials in RAs. Howe v er , they face sev eral challenges, including the accu- racy of equi valent parameter modeling, performance stability across wide operating bands, and performance degradation at high frequencies such as mmW ave and THz bands. Other tunable materials, such as liquid metal, liquid crystal, and MEMS switches, offer better frequency stability and can operate effecti v ely in high-frequency bands. Howe ver , their switching speed remains a limitation, making it difficult to adapt to rapidly changing wireless channels. In summary , there is a need to dev elop advanced tunable materials that combine fast switching speed, a wide impedance tuning range, stable frequency response, and high performance at ultra-high frequencies [217]–[219]. Modeling RA P arameters into W ir eless Systems : Although the EM performance of RAs has been widely studied, fe w works hav e focused on directly modeling RA parameters into wireless system performance. Therefore, it is promising for future research to integrate EM theory with wireless commu- nication theory . System lev el optimization, such as capacity maximization based directly on RA parameters, holds great potential [175], [220]–[222]. This approach can help bridge the gap between these two research domains. 2) Reconfigurable Antenna-Array: In this subsection, we revie w recent de velopments in RA arrays, with particular attention to their classification, implementation strategies, and associated design challenges. a) Classification: From a structural perspective, RA ar- rays can be divided into two main configurations [ ? ], [164], [223]. One configuration consists of numerous independently RA elements, each capable of adjusting parameters such as frequency , radiation pattern, or polarization. By jointly controlling all the elements, fine-grained control of the ov erall array can be achieved. Howe ver , this configuration typically incurs greater control complexity and higher power consump- tion. Alternatively , the array can be divided into multiple subarrays, where groups of elements share common hard- ware resources (e.g., RF chains and phase shifters), thereby simplifying system design and reducing hardware complexity and power consumption, albeit at the cost of reduced fine- grained reconfigurability and control accuracy . Accordingly , an appropriate trade-off or hybrid configuration can be flexibly adopted depending on system performance requirements, as well as power and complexity constraints. b) Reconfigurable Methods: V arious implementation methods can be employed to unlock the potential of RA arrays. As illustrated in Fig. 5, those typical techniques include: AS : This is considered as a low-comple xity reconfiguration method where only a subset of antennas is activ ated based on channel conditions, thus reducing the number of RF chains and power consumption [46], [224]–[226]. By selecting the “best” antennas, AS can retain much of the performance gain of the large array while simplifying the hardware implementation. Notably , the AS technique can be regarded as a form of spatial reconfiguration, which selectiv ely activ ates antenna elements or subarrays based on their positions within the 11 array . It is especially useful in mMIMO systems with limited RF resources, aiming to achiev e a better balance between throughput and cost. Howe ver , AS requires fast and adaptiv e switching algorithms to cope with channel variations, and it offers less beamforming gain than the full-array control. Despite these limitations, AS remains an efficient solution in power -limited or hardware-constrained scenarios. Analog/Digital/Hybrid Beamforming : Analog, digital, and hybrid beamforming schemes are key techniques emplo yed in RA arrays to steer and reshape radiation patterns, each char- acterized by distinct trade-offs among performance, flexibility , and implementation complexity [227]. Analog beamforming utilizes phase shifters and variable gain amplifiers (VGAs) to manipulate the phase and amplitude of signals directly in the RF domain, providing a low-complexity and energy-ef ficient solution for beamforming. Howe ver , analog beamforming typ- ically generates a single beam that serves a specific user or spatial region. As a result, it inherently lacks the ability to independently form multiple beams, which is essential for serving multiple users or supporting spatial multiplexing in MU-MIMO systems. Therefore, analog methods are often complemented by digital beamforming, which operates at the baseband le vel with advanced signal processing algorithms and high-resolution conv erters. Digital beamforming enables pre- cise control over beam patterns, supports multi-stream trans- mission, and provides robust interference mitigation, albeit at the expense of increased hardware complexity and po wer con- sumption [228], [229]. Hybrid beamforming strikes a balance between the two approaches by combining analog front-end processing with a reduced number of digital processing chains. This architecture significantly lowers implementation cost and energy requirements while retaining suf ficient beamforming capability , making it especially suitable for high-frequency applications such as mmW av e communications [230], [231]. IRS : IRS represents a class of passive RA structures that extend traditional antenna array functionality into the wire- less propagation environment [83]–[85], [232], [233]. Unlike con ventional arrays that activ ely transmit or receive signals, IRS consists of a large number of low-cost passiv e reflecting elements capable of dynamically tuning the phase of incident signals, collaboratively reshaping the wireless channels. This allows IRS to support ke y communication functions such as signal enhancement, interference mitigation, and spatial multiplexing, without relying on activ e RF chains or power- hungry signal processing units [234], [235]. As such, IRS bridges the gap between transceiver -side array processing and en vironment-side reconfiguration, providing a cost-effecti v e and energy-ef ficient solution for future wireless networks such as 6G. Howe ver , integrating IRS into practical systems poses significant challenges, particularly in accurate channel estimation and passi ve beamforming under hardware con- straints, thereby motiv ating extensi ve research on robust signal processing and system design tailored to this new class of RA arrays. DMA : As an activ e RA technology , DMA has emerged as a promising hardware solution for realizing mMIMO transceiv ers in 6G wireless systems [236]. Unlike con ven- tional antenna arrays that rely on complex RF chains and phase shifters, DMA utilizes wav eguide-fed arrays of tunable metamaterial elements to achieve beamforming and signal processing [237]. This unique structure enables DMA to support a large number of antenna elements with significantly fewer RF chains, reducing hardware cost, power consump- tion, and system complexity [238]. Moreover , compared with con ventional antenna arrays based on hybrid beamforming, DMA can not only accommodate more antenna elements within the same aperture but also eliminate the need for complex corporate feeds and/or active phase shifters. In ad- dition, extensi v e research has demonstrated that DMA can approach the performance of fully-digital mMIMO systems, ev en under limited RF chain constraints [87], [239], [240]. Despite their potential, ke y challenges remain in areas such as efficient channel estimation and hardware implementation at mmW av e and THz bands. Addressing these challenges will be essential to fully realize the advantages of DMA in practical deployments. HMIMO : As a forward-looking extension of RA array technology , HMIMO represents a transformativ e approach for future wireless networks by redefining how EM wa ves are generated, manipulated, and receiv ed [77]. Unlike conv en- tional mMIMO relying on discrete antenna arrays with half- wa velength spacing, HMIMO utilizes nearly continuous, ultra- thin surfaces composed of densely packed, sub-wavelength elements or metasurfaces [241]. These surfaces, either activ e or passiv e operation, enable high-resolution beamforming, wa ve focusing, and polarization control directly in the EM domain. In particular, acti ve HMIMO integrates RF chains and signal processing for direct EM-domain beamforming, while passiv e HMIMO (often realized as IRS [83]) manipulates wa ves with lo w power consumption, suitable for cost-ef fecti ve deployment [75]. Therefore, HMIMO transforms the wireless medium from a passive channel into a programmable en vi- ronment, offering substantial gains in signal quality , energy efficienc y , and capacity . It is worth emphasizing that IRS can be considered as a passive and reflectiv e RA array technology that does not activ ely generate RF signals, but instead reshapes the wireless propagation en vironment by controlling the reflec- tion of incident waves. This is fundamentally different from activ e and radiati ve architectures, such as DMA and activ e HMIMO, which directly transmit and process RF signals. From another perspective, HMIMO also bridges Shannon’ s information theory and Maxwell’ s equations, thereby fostering the dev elopment of EM information theory [242]. Despite its promise, HMIMO faces challenges in hardware scalability , mutual coupling, near-field channel modeling, and EM-aware signal processing. Nonetheless, its ability to unify communica- tion, sensing, and control in a reconfigurable EM environment positions HMIMO as a foundational technology for future intelligent and immersive systems. c) Design Challenges and P ossible Solutions: From a structural perspective, a key design challenge for RA arrays lies in managing the trade-off between control granularity and system complexity . While employing numerous indepen- dently reconfigurable elements of fers the finest control over the array’ s radiation properties, this approach often leads to prohibitiv e control complexity and high power consumption 12 M ot or S l i de t ra c k S l i de t ra c k A nt e nna fl ui d A i r c ha m be r F l ui d c ont a i ne r M i c ros t ri p D i e l e c t ri c s ubs t ra t e G round pl a ne A r r ay Imp l e m e n t at i on E l e m e n t I m p l e m e n t at i on M otor - b as e d M ovab l e El e me n t Li q u i d - b as e d M ovab l e El e me n t M otor - b as e d M ovab l e A r r ay I n fl atab l e S tr u c tu r e - b as e d M ovab l e A r r ay F ol d ab l e S tr u c tu r e - b as e d M ovab l e A r r ay Fo l de d a rra y E xpa nde d a rra y M E M S a c t ua t ors bi a s CP S l i ne M ova bl e a rm s M EM S - b as e d M ovab l e El e me n t MA M ot or M ot or S l i de t ra c k S l i de t ra c k M A a rra y M ot or M A a rra y I nfl a t a bl e m e c ha ni s m W a ve gui de S e pa ra t e di e l e c t ri c S i gna l F re e - s pa c e ra di a t i on P i n c h i n g A n te n n a - b as e d M ovab l e El e me n t Fig. 6. Illustration of typical implementation methods for realizing antenna mov ement and reconfiguration. [ ? ], [164], [223]. A possible solution is to partition the array into subarrays that share common hardware resources, which simplifies the design and reduces power , albeit at the cost of less precise reconfigurability . Furthermore, v arious implemen- tation strategies present their o wn challenges. For instance, AS is a low-comple xity method but requires fast, adaptiv e algorithms and provides less beamforming gain than full- array control [46], [224]–[226]. Hybrid beamforming strikes a balance between performance and cost but requires careful partitioning of analog and digital resources [230], [231]. More advanced architectures like IRS and DMA face significant hurdles in efficient and accurate channel estimation [83]–[85], [232], [236], while holographic MIMO introduces challenges in hardware scalability , mutual coupling, and near-field mod- eling [77]. In summary , different forms of RA techniques exhibit distinct functionalities and entail varying trade-offs in per- formance, system complexity , and implementation cost. As a result, future research and deployments will benefit from integrated strategies that harness the complementary strengths of these technologies, thereby enhancing system performance and enabling flexible, efficient, and highly adapti ve wireless networks. B. MA Arc hitectur es The practical realization of MA/6DMA systems is funda- mentally dependent on their hardware architectures. These architectures define the methods and constraints associated with physically altering an antenna’ s position or orientation to adapt to the wireless environment. As illustrated in Fig. 6, the approaches to implement MA/6DMA can be broadly cate- gorized based on whether the mov ement pertains to indi vidual antenna elements or to entire antenna arrays/subarrays. Each category encompasses distinct mechanical strate gies to achie ve the desired spatial adaptability . 1) Movable Antenna-Element: Architectures for mov able antenna-elements in 6DMA systems are designed to enable each individual antenna-element to change its physical po- sition and/or orientation. This element-lev el control allows for precise adjustments to improve wireless communication or sensing performance. In this subsection, we revie w the current progress of mov able antenna-element, with a focus on their classification, implementation methods, and key design challenges. a) Classification: Based on the av ailable hardware- enabled DoFs, the movement of indi vidual antenna elements in 6DMA systems is classified into two fundamental types: translation and orientation [106]. T ranslation : Position reconfiguration in volv es the physical translation of an antenna element. This can be along a 1D line segment or within a giv en 2D/3D space [90], [91]. Such mov ement allows the antenna’ s phase center to be dynamically relocated to positions in space that of fer more fa v orable chan- nel conditions, such as increasing signal strength or decreasing interference [243]. Orientation : In addition to translation, orientation recon- figuration allo ws an antenna element to be rotated [93]– [95], [106]. This can in volv e rotation about a single axis, or more complex rotations about multiple axes providing 2D or 3D orientational DoFs. Adjusting orientation is particularly crucial for directional antennas, enabling their main radiation lobes to be precisely aimed to wards desired signal sources or receiv ers, or to optimize polarization alignment with the incoming EM wav es [93]–[97], [244]–[259]. The antenna ori- entation/boresight reconfiguration can be achiev ed by mechan- ically driven or electronically driv en mechanisms [96], [97], [244]. While mechanically driv en methods typically provide a wider control range, electronically driven approaches offer significantly faster response times and better compatibility with existing platforms. b) Implementation Methods: Beyond antenna structure design, the choice of implementation methods is also critical and is revie wed as follows. Mechanical-based Methods : Mechanical actuation is a com- 13 mon approach, employing external mechanical structures equipped with actuators such as electric motors or precision gears [90]. 6DMAs can be directly mounted on motor-driv en shafts [106], [260] or guided by linear actuators, pro viding controlled and often precise changes in their 3D position and orientation. The speed of such motor-based systems typ- ically results in response times ranging from milliseconds to seconds [260]. A more compact and potentially faster form of mechanical actuation is achiev ed through MEMS [261]. MEMS technology allows for the fabrication of miniature mechanical components that can physically mov e or tilt parts of the antenna element. Due to their small scale, MEMS- based MAs can offer faster response times, potentially in the order of microseconds to milliseconds, and thus are suitable for applications requiring rapid, small-scale adjustments, such as implementing flip modes or fine-tuning positions. Liquid-based Methods : Liquid-based methods provide an alternativ e means of achieving element mov ement by lever - aging the flow characteristics of conducti v e or dielectric fluids within a confined structure or channel, which can be driven by a syringe [262], a nano-pump [263], or electrowetting [264]. The movement of the fluid can be induced by various means. For example, pressure can be applied using a syringe-like mechanism [262], or more precise control can be achieved with micro-pumps or nano-pumps that displace the liquid metal within an air chamber or microfluidic channel [262], [263]. Another technique is electrowetting, where an applied electrical voltage alters the surface tension of the liquid metal in contact with an electrode, generating forces that cause the liquid to mov e, thereby changing the antenna’ s effecti ve radiating structure or position [264], [265]. Liquid-based MAs typically enable 1D positional changes, and their response times are generally in the order of milliseconds to seconds [260]. Pinching Antenna-based Methods : Pinching antenna-based methods provide a novel way to realize antenna element mov ement by controlling the radiation point along a wa v eguide rather than physically moving the entire structure [132]. In this architecture, a radio frequency signal is fed into a dielectric wa ve guide. By bringing a separate dielectric material into close proximity to the wave guide at an arbitrary point, a “pinch” is created as an antenna radiator . This effecti vely creates a mov able radiating element whose position can be dynamically controlled by moving the point of the pinch along the wa ve guide. This technique, first introduced in 2022, enables long-distance antenna positioning along a defined path [132], and it has since been applied to various communication scenarios [133]. c) Design Challenges and P ossible Solutions: The devel- opment of mov able antenna-elements presents sev eral design challenges [106], [260]. For mechanically mov able elements, the complexity of the mechanism, the need for ongoing main- tenance, and the physical limitations of the actuators (such as size, power , and speed) are primary concerns. Ensuring reliable RF connections and power deli very to the moving element without hindering its range of motion or introduc- ing signal degradation requires careful design of wiring and feed networks. EM coupling between antenna elements can also be affected by their physical movement, necessitating thoughtful placement and potentially adaptive compensation. Furthermore, the energy efficiency of the movement mecha- nism and the latency incurred during repositioning are critical performance aspects. Liquid-based elements also face unique challenges. The se- lection of a suitable fluid material is important, as it must meet stringent criteria related to cost, safety , long-term physical and chemical stability , appropriate melting and e v aporation points, and suitable viscosity for controlled flow [260]. The EM prop- erties of the fluid, including its permitti vity , permeability , con- ductivity , and loss tangent, are crucial for antenna performance and must be optimized. Achie ving complex movements, such as multi-dimensional positioning or rotational functionality for omnidirectional coverage, can be difficult with liquid-based approaches, which are often better suited for simpler linear displacements. Reliable containment and sealing of the liquid material are also important practical considerations to prev ent leakage and ensure operational integrity . Solutions to these challenges are pursued through ongoing research into novel materials, adv anced actuator designs, sophisticated control algorithms, and durable, flexible interconnect technologies. 2) Movable Antenna-Array: Mov able antenna-array archi- tectures extend the concept of physical movement to groups of antenna elements. This can inv olve the coordinated reposition- ing or reorientation of multiple antenna elements that form an array or subarray , allowing for changes in the array’ s overall geometry , aperture, or pointing direction. In this subsection, we revie w the current progress of mov able antenna-array , with a focus on their classification, implementation methods, and key design challenges [105], [106]. a) Classification: The classification of array-le vel move- ment encompasses se veral distinct approaches, including ar- rays composed of individually mov able elements and arrays composed of movable subarrays. Array of Movable Elements : An array of individually mov- able elements represents the most flexible configuration, where each element within the array retains the ability to be mov ed independently , as described for single mov able elements. This offers the maximum possible DoFs for dynamically reconfig- uring the array geometry . Array of Movable Subarrays : A more constrained but often more mechanically feasible approach is the array of mov able subarrays [266]. In this configuration, the entire antenna array is typically di vided into se v eral smaller , rigid subarrays. These subarrays are then mounted on mechanical systems, such as linear tracks, that allo w them to move relative to each other or to a fixed frame. This allows for the adjustment of distances between subarrays, effecti vely changing the array’ s baseline and sparsity , which can be used to enhance the effecti ve aperture or modify the beamforming characteristics [267]. b) Implementation Methods: The implementation of array-lev el movement can be classified into the following categories. Mechanical-based Methods : Mechanical-based architectures for array-lev el movement in v olve altering the geometry of antenna arrays or subarrays using external mechanical systems. One possible approach is the sliding array [260], [266], which 14 T ABLE III K E Y C HA R AC T E RI S T I CS O F R EP R E S EN TA T IV E M A I M P LE M E N T A T IO N M E T H OD S . Implementation Methods T uning T ype T uning Range T uning Speed Power Consumption Motor Continuous/Discrete W ide Moderate (ms ∼ s) High MEMS Continuous/Discrete Small F ast (µs ∼ ms) Low Liquid Continuous Constrained by linear fluidic channels Moderate (ms ∼ s) Moderate Pinching Antenna Continuous/Discrete Constrained by linear wav eguides Moderate (ms ∼ s) Moderate Inflatable Structure Discrete Fixed (Sto wed-to-deployed) Slow (s) High Foldable Structure Discrete Fixed (Sto wed-to-deployed) Slow (s) High is composed of one or more subarrays that move along prede- fined tracks or paths. Another common implementation is the rotatable array , where an entire antenna array is mounted on a platform that permits flexible rotation in terms of yaw , pitch, and roll [93]–[95]. This architecture is particularly beneficial for installations such as BSs, as it enables the main radiation lobe to be precisely directed to ward clusters of users [93], [94], [260]. Inflatable Structure-based Methods : Inflatable structures represent a type of deployable array designed to change their physical form from a compact state to an expanded and operational configuration [268]. These arrays utilize internal gas pressure to achiev e their intended shape and structural rigidity . Inflatable arrays are especially useful in scenarios where a large aperture is required but stow age volume is a critical constraint. This makes them highly suitable for space applications where they can be compactly stored during launch and expanded once in orbit. F oldable Structur e-based Methods : Similar to inflatable structures, foldable arrays are a form of deployable array that can transition between a compact, sto wed state and a larger , operational geometry [166], [269]. These arrays often employ origami principles to facilitate their transformation. This adaptability is advantageous for terrestrial systems; for instance, a deployable array on a BS could be folded to mini- mize wind resistance during se vere weather conditions. While offering a cost-effecti v e solution for implementing MAs, the range of motion in foldable arrays is inherently limited by the mechanical properties of the structure. A performance summary table is giv en in T able III. c) Design Challenges and P ossible Solutions: The imple- mentation methods for movable antenna-arrays are predomi- nantly mechanical. For sliding and rotatable arrays, systems in v olving motors, gears, and linear actuators are commonly used. For example, wheel-and-gear mechanisms or rod-and- motor systems can driv e the mov ement of subarrays along predefined tracks for sliding functionality , or rotate the entire array structure for orientation changes [94], [260]. These are essentially scaled-up versions of the actuators used for individ- ual element movement, designed to handle the larger masses and forces inv olved. Foldable structures rely on integrated mechanical linkages and hinges that allow the array to be collapsed or expanded. The precision of these mechanisms determines the accuracy of the deployed array geometry . Inflatable structures are deployed by filling a flexible env elope with gas, where the antenna elements are typically embedded in or attached to this en velope. The structural integrity and shape are maintained by internal pressure. Designing and implementing mov able antenna-arrays presents considerable challenges. For sliding arrays, the me- chanical systems must be robust and reliable ov er many cycles of movement, and capable of precise control to achiev e the desired subarray positions [260]. The structural complexity can be significant, and managing the energy consumption and latency associated with moving potentially large sub- arrays are important design factors. Maintaining consistent and low-loss RF connections to the sliding subarrays as they move is also a critical engineering task, often requiring specialized flexible cables or non-contact power and signal transfer methods. In addition to specialized flexible cables, non-contact feeding mechanisms ha ve also been considered as a promising solution for maintaining reliable RF connections in MA-arrays. Representativ e approaches include wav eguide- based feeding as well as near-field capacitiv e or inductiv e coupling, which can eliminate physical cable connections and simplify the hardware architecture for realizing antenna mov ement. Rotatable arrays also face challenges related to the mechanical wear and tear of rotating parts, especially for continuous or frequent adjustments. Ensuring stable and reliable RF connections through rotary joints or slip rings is crucial to prev ent signal degradation. Furthermore, even with a fixed array position, the optimization of array orientation in dynamic multiuser communication scenarios can be a complex problem requiring advanced control strategies [96], [97]. Realizing deployable arrays, including foldable and in- flatable structures, also presents significant challenges. The achiev able range of positions and orientations, as well as the precision of the final deployed geometry , are usually constrained by the mechanical properties of the materials and the design of the deployment mechanism [260]. It is essential to ensure the durability and reliability of these mechanisms, particularly for repeated deployment and retraction cycles. Inflatable structures specifically face issues such as maintain- ing the correct internal pressure, vulnerability to punctures or leaks, and the potential for deformation due to environmental factors like wind or temperature changes. Achieving and maintaining high precision in the shape of a large inflatable antenna surface can be particularly demanding. Addressing these multifaceted challenges requires interdisciplinary solu- tions in volving adv anced materials science, precision mechan- ical engineering, rob ust control systems, and durable RF inter - connects, all tailored to the specific operational requirements and en vironmental conditions of the mo vable antenna-array systems. 15 T ABLE IV C O MPA R IS O N O F R A A N D M A . Performance Metrics Functionality Comparison Similarities Differences Similarities Differences RA Power consumption, Integration complexity Bandwidth, Frequency , Radiation pattern, Polarization modes RA pattern/polarization reconfiguration vs. 6DMA rotation; Displaced phase centre antennas vs. MA translation; Aim to improve system-le vel performance Frequency reconfiguration MA/6DMA Mov ement speed, Mov ement range, Mov ement accuracy Large-scale channel reconfiguration C. Comparison of RA and MA RA and MA/6DMA both offer enhanced DoFs for wire- less systems compared to conv entional antenna systems, but through fundamentally dif ferent mechanisms. RA primarily alters its internal operational characteristics, while MA/6DMA modifies its external spatial properties, specifically its phys- ical position and/or orientation. Understanding their distinct performance metrics and functional capabilities is crucial for lev eraging them effecti vely in future wireless communication and sensing systems. 1) P erformance Metrics: The metrics used to ev aluate the performance of RA and MA/6DMA reflect their distinct modes of operation and the parameters they influence. For RA, key performance metrics relate to the ability to adapt the EM properties. Bandwidth and tunable operating frequency range are critical, indicating the antenna’ s adaptability to various communication standards or its ability to perform cognitive radio functions by selecting less congested channels. The ra- diation pattern c haracteristics , such as beamwidth, directi vity , side lobe lev els, and nulling depth, along with the speed and range of beam steering or shaping, define its radiation reconfigurable capabilities. The range and switching speed between different polarization modes (e.g., linear , circular, and their orientations) are important for mitigating polarization mismatch and enhancing diversity . From a system perspecti ve, the power consumption associated with the reconfiguration mechanism (e.g., power for PIN diodes, MEMS switches, or tuning circuits) and the inte gration complexity , including the control circuitry and footprint, are significant practical considerations. The ef ficiency of the antenna in its various states and the losses introduced by reconfiguration components also play a vital role. For MA/6DMA, the most important performance metrics are the physical displacement capabilities. The movement speed is a crucial metric, which dictates ho w quickly an an- tenna can change its position or orientation to adapt to dynamic channel conditions or track mobile users. The movement range , defining the spatial region within which an antenna can be repositioned, or the angular range through which it can be rotated, determines the spatial DoFs that can be exploited. Movement accuracy and r epeatability are also vital, ensuring that the antenna can be precisely positioned or oriented to the desired state. Similar to RAs, the power consumption of the actuation mechanisms (e.g., motors, MEMS actuators for MA) is a ke y factor , especially for energy-constrained devices. The inte gration comple xity of the mechanical actuators, control systems, and the physical space required for mo vement, as well as the reliability and durability of these mechanical parts, are also critical for practical deployment. The overhead in terms of time and energy for movement and for acquiring CSI ov er the entire movement region also impacts system efficiency . 2) Functionality Comparison: The distinct mechanisms of RA and MA/6DMA lead to different and complementary functional capabilities for enhancing system-le vel performance in both wireless communication and sensing applications. RA can achie ve functionalities like radiation pattern reconfigura- tion and polarization reconfiguration by altering its internal structure or current distributions. For instance, an RA can steer its main beam towards a user or place nulls towards non-intended receiv ers electronically , or switch its polarization state to better match the incoming wave. These capabilities are similar to the orientation adjustments of a 6DMA, but are achiev ed through different mechanisms. While an RA might electronically tilt its beam, a 6DMA physically rotates its entire structure to achie v e a similar ef fect in terms of aligning its directional g ain. The speed of reconfiguration is a key factor for RA pattern/polarization reconfiguration or 6DMA rotation. Specifically , RAs typically offer much faster electronic-speed adjustments compared to the mechanical-speed rotations of 6DMA. Ho we ver , 6DMA might of fer a wider continuous range of angular adjustments in 3D space [94]. Moreov er , RA employing a displaced phase center can achiev e effects similar to those of translational movement in MA. By electronically altering its operational mode, an RA can shift the position of its effecti ve radiating center [260]. This contrasts with the physical translation of MAs, where the antenna element is physically moved to a new position. Through physical translation, MAs can explore a continuous or finely discretized range of positions within their movement region, potentially accessing a significantly larger set of spatial channel variations than that via phase center displacement in RAs. Phase center displacement in RAs is generally con- strained by the antenna’ s electrical size and design, whereas MAs, though limited by mechanical constraints, can enable larger -scale physical translations [260], [270]. In summary , both RA and MA/6DMA technologies aim to enhance the system-lev el performance of wireless communica- tion and sensing. In communication systems, this enhancement may take the form of increased channel capacity , improved link reliability , enhanced coverage, and more effecti ve in- terference mitigation. In sensing applications, the objectiv es 16 typically include improved accurac y , higher resolution, and higher detection probability . RA can achie ve these benefits by dynamically adapting its EM response to the en vironment, whereas MA/6DMA is realized through physical translation and/or orientation to achieve more fav orable channel condi- tions. The choice between RA and MA/6DMA technologies depends on the specific application requirements, the charac- teristics of the wireless environment, and practical constraints such as speed, po wer consumption, system complexity , and cost. For example, RA may be preferred for rapid adaptation in highly dynamic interference scenarios, while MA/6DMA may prove more effecti v e in slowly varying en vironments where larger-scale spatial adjustments can deliver substantial long-term performance gains. The comparison of RA and MA/6DMA is summarized in T able IV. A promising future direction is the dev elopment of hybrid architectures that integrate both RA and MA functionalities. Such systems could le verage the rapid electronic reconfig- urability of RA for fine-grained and instantaneous channel adaptation, together with the large-scale spatial optimization of MA for long-term performance enhancement. For instance, an antenna array can be moved to achieve fa vorable large- scale channel conditions, while individual RA elements within the array dynamically adjust their radiation patterns to track fast fading or suppress time-v arying interference. The joint optimization of these complementary DoFs thus represents a fertile area for future research. I I I . R A A N D M A F O R W I R E L E S S C O M M U N I C A T I ON S A. RA for W ir eless Communications By dynamically reconfiguring key EM properties such as radiation pattern, operating frequency , and polarization, RAs offer substantial performance benefits for wireless communi- cation systems. These benefits include improved spectral and energy ef ficiency , enhanced spectrum utilization, as well as increased link reliability and data rate [271]. 1) P erformance Advantages: RA can offer distinct per- formance adv antages across v arious RA types. Pattern-RAs provide additional DoFs for manipulating antennas at the EM lev el, significantly enhancing spectral efficienc y (SE) and energy ef ficienc y in existing architectures by aligning radiation patterns with propagation channels [220], [272]–[274]. In [274], a three-lev el precoding framework w as introduced to in- tegrate pattern-RAs with hybrid analog/digital arrays. Fig. 7(a) presents the schematic diagram and hardware design of an RA- based mMIMO system. Unlike traditional mMIMO systems, RA-based hybrid mMIMO systems incorporate an additional parasitic layer atop the patch layer , allowing each antenna to independently shape its radiation pattern. Fig. 7(b) illustrates a single reconfigurable patch antenna (RP A), comprising a patch layer that hosts the patch antenna and a parasitic layer made up of interconnected metallic pix els. Fig. 7(c) illustrates examples of radiation patterns from a single RA, sho wcas- ing different radiation directions and shapes. By properly optimizing the PIN connections via offline methods such as genetic algorithms [275], a desired set of radiation patterns can be selected and maintained for data transmission. Fig. 8 Sector 1 Sec tor 2 Sector 3 RA-based mMIMO Reconfigurable radiation patterns Patch layer Parasitic layer Patch antenna Metalic pixel DC control lines (a) (b) (c) RF network (Analog Precoder) patch layer par asitic layer to baseband (Digital Precoder) antenna array (EM Precoder) PIN diode 1 2 3 45 67 8 9 10 11 12 Fig. 7. Schematic diagram of pattern-RA-based mMIMO systems: (a) mul- tiuser downlink transmission and the corresponding mMIMO architecture, (b) structure of a single pattern-RA, and (c) examples of 3D radiation pattern produced by a pattern-RA [274]. 5 10 15 20 25 30 35 40 45 50 SE (bit/s/Hz) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 CDF of the SE Traditional mMIMO (U=1) Pattern-reconfigurable mMIMO (U=1) Traditional mMIMO (U=2) Pattern-reconfigurable mMIMO (U=2) Traditional mMIMO (U=4) Pattern-reconfigurable mMIMO (U=4) Traditional mMIMO (U=6) Pattern-reconfigurable mMIMO (U=6) Fig. 8. A comparison of CDF curves of traditional mMIMO and pattern- reconfigurable mMIMO under different number of UEs, U [274]. compares the cumulati ve distribution functions (CDFs) of the SE between traditional mMIMO and pattern-reconfigurable mMIMO architectures, with the system setup detailed in [274]. The results sho w that for a varying number of UEs, the pattern- reconfigurable mMIMO system consistently achie ves higher SE. W ithin a giv en predefined set shown in Fig. 7(b), by optimizing radiation pattern combinations at different anten- nas, the average SE gains of pattern-reconfigurable mMIMO significantly exceed those of its traditional counterpart across different numbers of user equipments (UEs), denoted by U , demonstrating the benefits of increased DoFs provided by RAs. Frequency-RAs are effecti vely used in cognitiv e radio sys- tems [64]. These systems are designed to reduce spectrum congestion and improve spectrum utilization by detecting unoccupied or idle frequency bands and dynamically adjust- ing operational settings to ensure reliable communication. Frequency-RAs can alter their resonant frequency to sup- port multiple wireless services, including WLAN, Bluetooth, 17 and global positioning system (GPS), across a wide range of frequency spectrum. W ith the increasing av ailability of spectrum in future 6G communication systems, frequency-RAs offer an efficient solution to carrier aggregation in mmW ave and THz communications, enabling simultaneous transmission and reception across multiple frequency channels to enhance data rates. Moreover , frequency-RAs can also be employed in cov ert communication systems, facilitating channel random- ization through frequency hopping [63], [64]. Polarization-RAs can be used to create diversity for a more reliable link with higher data throughput. Rather than relying on multiple antennas to receive different polarization states, a single antenna with adjustable polarization can be utilized, thereby reducing the size of communication systems for devices with size constraints. Additionally , the polarization domain can enhance data throughput. In [276], a polarization modulation scheme was proposed to encode additional infor- mation in the axial ratio and tilt angle of elliptic polarization, achieving target data rates for 5G wireless systems with reduced bandwidth or fewer antennas. 2) Mode Design and Selection: The introduction of addi- tional antenna DoFs necessitates corresponding optimization methods for mode design and selection, aligning with trans- mission objectiv es such as enhancing system data rate. In the context of radiation pattern design and selection for RA- aided communication systems, existing pattern optimization techniques can be categorized into two types: discrete space pattern selection and continuous space pattern design. For discrete space pattern selection, the goal is to iden- tify optimal combinations of predefined radiation patterns within mMIMO systems to maximize system performance, requiring efficient search strategies within expansiv e pattern search spaces. An iterativ e mode search (IMS) method was dev eloped to optimize the radiation pattern combinations at the transmitter , with its complexity scaling linearly relative to the number of transmit antennas [172]. Similar methods have been proposed in [272], [274], underscoring the substantial potential of improving the system throughput by employing reconfigurable patterns in mMIMO systems. For continuous space pattern optimization, the authors in [277], [278] formu- lated the pattern optimization as a continuous space sampling matrix design problem. In [277], a sequential optimization framew ork was introduced to refine pattern design within the continuous pattern space for MIMO arrays. Addressing multiuser downlink precoding, joint optimization of symbol- lev el precoding in the digital domain alongside pattern design in the EM domain w as considered in [278]. Additionally , to ex- pand scenarios to multiuser wideband mMIMO pattern design challenges, a spherical harmonic functions-based orthogonal decomposition method was proposed in [279], con verting continuous pattern function design into the optimization of projection coefficients over spherical harmonic bases, thereby enabling flexible radiation design with desired DoFs. 3) Channel Estimation/Acquisition: The authors in [280], [281] addressed the channel estimation challenges in pattern- RA-based mMIMO systems. Unlike traditional mMIMO sys- tems that inv olv e estimating a single channel matrix, pattern- RA-based mMIMO systems typically exhibit multiple chan- nel states due to their various radiation patterns, resulting in significant pilot overhead. In [280], the Gram-Schmidt process was applied to decompose the radiation patterns into orthogonal basis patterns, effecti vely decoupling antenna radi- ation patterns from the surrounding channel en vironment. This decomposition facilitated the dev elopment of a joint channel estimation and prediction scheme, thereby reducing the high ov erhead associated with estimating channels for multiple antenna radiation patterns. Moreov er , the authors in [281] proposed a deep learning-based channel extrapolation method. During channel estimation, different patterns were assigned to different antennas at the transmitter , and a deep neural network was employed at the recei ver to extrapolate channels for other patterns. This method can achiev e a good channel estimation performance with low pilot overhead. Ho wev er , further in v estigation into wideband channel estimation with larger sets of radiation patterns is still underexplored [282], [283]. 4) Extension to IRS-aided W ir eless Communications: RA technology has demonstrated significant capabilities in en- hancing communication performance by dynamically adjust- ing internal antenna parameters such as frequency , radiation pattern, and polarization. Howe ver , the active RA ’ s capabilities remain constrained by its localized hardware-centric adaptabil- ity , due to the antenna’ s intrinsic reconfiguration range and physical placement. Challenges such as limited cov erage in dense multipath environments and high energy consumption for rapid pattern switching still persist, particularly in non- line-of-sight (NLoS) scenarios. IRS builds upon the principles of RA by further extend- ing from de vice-le vel reconfiguration to en vironment-le vel programmability . While the activ e RA modifies the inher- ent properties of the transceiv er , IRS reshapes the wireless propagation en vironment, providing a scalable and energy- efficient complement to RA-based transceiv ers [83], [84], [284]. Specifically , IRS comprises digitally controlled passiv e elements capable of precisely manipulating EM wav e reflec- tions by adjustable phase shifts of the incident signals [80], [285], [286]. Therefore, IRS can directly reshape the wireless propagation channel to optimize signal transmission, such as enhancing the receiv ed signal power for intended users and mitigating interference for unintended users [287]–[290]. T o fully exploit the potential of IRS, accurate CSI is essential. In practical applications, the lack of signal process- ing capabilities in passi ve IRSs prevents them from directly sensing the wireless en vironment, thereby making channel estimation a critical and challenging task. One feasible ap- proach is to integrate active sensors into the IRS, enabling it to autonomously acquire CSI [291]–[293]. For example, a low-complexity method using an L-shaped sensing array on the IRS was proposed to separately estimate BS-IRS and user-IRS channels based on angle-of-arriv al (AoA) and path gain [291]. Howe ver , this integration inevitably increases the energy consumption and hardware cost of the IRS. Another method relies on transmitting pilot signals [234], [286], [294]– [297], allo wing the recei v er to directly estimate the transmitter- IRS-receiv er cascaded channel. One representativ e method employs ON/OFF training reflection patterns for distinct IRS 18 D i gi t a l S i gna l P r oc e s s or R F C ha i n D i gi t a l S i gna l P r oc e s s or R F C ha i n ... T r a ns m i t t e r R e c e i ve r D i gi t a l S i gna l P r oc e s s or R F C ha i n R F C ha i n ... R F C ha i n R F C ha i ns ... M ova bl e A nt e nna s T r a ns m i t R e gi on T r a ns m i t t e r D i gi t a l S i gna l P r oc e s s or R F C ha i n ... R e c e i ve r D i gi t a l S i gna l P r oc e s s or R F C ha i n R F C ha i n ... R F C ha i n R F C ha i ns ... M ova bl e A nt e nna s T r a ns m i t R e gi on T r a ns m i t t e r D i gi t a l S i gna l P r oc e s s or R F C ha i n R F C ha i n ... R F C ha i n R F C ha i ns ... M ova bl e A nt e nna s R e c e i ve R e gi on R e c e i ve r ... pa t hs ... pa t hs ... D i gi t a l S i gna l P r oc e s s or R F C ha i n R F C ha i n ... R F C ha i n R F C ha i ns ... M ova bl e A nt e nna s BS D i gi t a l S i gna l P r oc e s s or R F C ha i n U s e r 1 D i gi t a l S i gna l P r oc e s s or R F C ha i n U s e r 2 D i gi t a l S i gna l P r oc e s s or R F C ha i n U s e r K MA - a i d e d S I S O S y s t e m s MA - a i d e d MI S O S y s t e m s MA - a i d e d M I M O S y s t e m s MA - a i d e d M u l t i u s e r S y s t e m s Fig. 9. Illustration of MA-aided SISO, MISO, MIMO, and multiuser communication systems. In these systems, the antenna(s) at the transmitter and/or receiv er can be moved to improve communication performance. elements in different time slots to separate each element’ s contribution at the recei ver [286], [294]. Other studies focus on increasing estimation accuracy and reducing training o verhead by adopting full-ON training reflection patterns, carefully designed pilot sequences, and element-grouping strategy [234], [295]–[297]. In addition, low-complexity techniques such as compressed sensing [298], [299] and codebook-based feed- back [300], [301] can also be applied to reduce the training ov erhead for channel estimation. On the other hand, to achieve the theoretical performance gain, precise control of IRS beamforming/reflection is required to achiev e high channel gain [302]. By le veraging the aforementioned channel estima- tion methods, joint optimization of IRS passi ve reflection and BS activ e beamforming can be performed using the estimated CSI. Howe v er , acquiring perfect CSI remains challenging due to channel aging, constrained training and feedback capacity , and the presence of noise. This challenge is further e xacerbated in IRS-aided systems gi ven the need to estimate additional IRS-associated channels. Consequently , extensiv e research has focused on IRS passive beamforming/reflection designs under imperfect or statistical/hybrid CSI [303]–[306]. Alternativ ely , some works seek to bypass explicit CSI acquisition by em- ploying beam training, deep learning, and other data-driven approaches [307]–[311]. These efforts collectiv ely aim to balance performance and complexity in IRS-aided systems under realistic CSI constraints. Besides, the performance of IRS systems is also highly dependent on deployment strategies. In static or quasi-static wireless environments, IRS can be strategically deployed at fixed locations to enhance cov erage and bypass blockages. Howe v er , in highly dynamic environments, static IRSs may be insufficient to adapt to rapid en vironmental changes. T o address this limitation, mobile IRSs mounted on vehicles or U A Vs hav e been proposed, enabling flexible deployment and real-time adaptation to user mobility and network dy- namics [312]–[314]. These mobile configurations introduce new design dimensions, such as joint trajectory and reflection optimization, enabling IRS to maintain consistent performance ev en in scenarios with high mobility or uncertain propagation conditions. In addition, prior works have mainly focused on single-IRS deployments located near the user , BS, or relay to enhance coverage or achie ve comparable performance to mMIMO [315]–[318]. Howe v er , such setups face challenges including limited reflection coverage, blockage susceptibility , constrained beamforming gains, and low spatial multiplexing due to channel correlation. T o overcome these limitations, re- cent studies have focused on double-/multi-IRS deployments, enabling coordinated reflection to enhance link robustness and system performance [235], [285], [316], [319]–[323]. For instance, the authors in [235] extended the alternating optimization based joint activ e/passi ve beamforming design to double-IRS systems by employing semidefinite relaxation and bisection methods to efficiently solve the max-min signal- to-interference-plus-noise ratio (SINR)/rate optimization prob- lem. Furthermore, by exploiting multi-reflection paths across distributed IRSs, multi-IRS systems can bypass obstacles, en- hance diversity , and improve beamforming ef ficiency , thereby supporting more flexible user association and quality-of- service provisioning [321]. As a further advance, the co-deployment and integration of IRS with RA technologies has the potential to synergistically enhance system flexibility and efficienc y . Such integration combines RA ’ s dynamic internal parameter adjustment with IRS’ s ability to manipulate the external propagation envi- ronment, creating more robust and adaptable wireless net- works. Nevertheless, substantial technical challenges remain, particularly in accurate cascaded channel estimation, practical beamforming design, and managing the complexities associ- ated with realistic hardware constraints. Therefore, continued research is essential to address these challenges, enabling the effecti v e integration of IRS and RA technologies to fully unlock their combined potential in future wireless commu- nication systems. 19 B. MA for W ir eless Communications MA/6DMA represents a significant paradigm shift in wire- less communication system design, offering the potential to substantially enhance performance by dynamically altering antenna positions and/or orientations. In contrast to traditional FP A systems, which are unable to exploit spatial DoFs through antenna position optimization, MA/6DMA systems can ac- tiv ely reconfigure their array geometries to lev erage more fa vorable channel conditions. This section explores the perfor - mance benefits, challenges in channel modeling, techniques for channel acquisition, and movement strategies associated with MA/6DMA-aided wireless communication systems. 1) P erformance Advantages: The fundamental performance gain of MA stems from its ability to e xploit the spatial variations inherent in wireless channels [91]. By physically moving the antenna elements, an MA system can adjust the phases of multipath components to achiev e constructi ve superposition at the receiver , thereby maximizing receiv ed signal power , or destructive superposition to null interference. This capability introduces new DoFs for obtaining fa vorable channel conditions. As shown in Fig. 9, in MA-aided SISO systems, the primary advantage lies in improving the effecti v e channel gain. By optimizing the antenna position, the phases of multiple channel paths can be aligned, leading to a significant increase in received signal po wer compared to an FP A that might be in deep fading [91]. Con v ersely , MAs can also be positioned to minimize the channel gain from an interfering source. Moreov er , for wideband systems, while frequency se- lectivity mak es it harder to align all paths across all subcarriers simultaneously , substantial average channel power gains are still achiev able via antenna position optimization [324]. For MA-aided MISO or single-input multiple-output (SIMO) systems, antenna movement of fers benefits beyond simple signal power enhancement. When MAs form an array , their positions can be jointly optimized to reshape the array geometry [325]–[327]. Under pure line-of-sight (LoS) condi- tions, this allows for highly flexible beamforming, such as achieving full array gain while steering nulls to wards multiple interference directions (i.e., beam nulling) [325], creating mul- tiple beams tow ards different users (i.e., multi-beam forming) [326], or ensuring uniform cov erage over a wide angular region (i.e., wide-beam coverage) [327]. These capabilities often exceed those achie v able by FP As relying only on antenna weight optimization. In point-to-point NLoS scenarios, MA arrays can optimize antenna positions to maximize the overall receiv ed signal power [328], [329], where each antenna is positioned to enhance its individual signal power , subject to inter-antenna spacing constraints to avoid antenna coupling. In MA-aided MIMO systems, antenna position optimization can significantly enhance spatial multiplexing performance [92]. In low SNR regimes, MAs can be configured to maxi- mize the largest singular v alue of the MIMO channel matrix, improving single-stream beamforming. In high SNR regimes, positions can be optimized to balance the singular values, catering to water-filling power allocation strategies across multiple eigenchannels [92]. This adaptation can be based on instantaneous CSI for slowly varying channels [92] or statistical CSI for fast-fading channels to improve ergodic capacity while reducing mov ement ov erhead [100], [142], [330]. Moreov er , for MA-aided multiuser systems, MAs can enhance performance by not only improving individual user channel gains but also by reducing inter-user interference [131], [138]–[140], [331]–[333]. Optimizing antenna positions at the BS or user de vices can reduce channel correlations between users [131], thereby enabling more effecti ve spatial separation and leading to improv ed multiuser communication performance. 2) Channel Modeling: Accurate channel models are crucial for the design and ev aluation of MA systems, as they must capture the continuous variation of the wireless channel with respect to antenna position and orientation. These channel models can be broadly categorized into those based on physi- cal path propagation and those based on statistical properties. The field-response channel model provides a foundational framew ork by characterizing the wireless channel based on physical propagation paths [91]–[93], [98], [99], [324], [334]. This model expresses the channel as a function of the trans- mitter and receiv er antenna positions and/or orientations by considering the superposition of multiple signal paths, each defined by its angle-of-departure (AoD), AoA, and a complex path response coef ficient. While initially applied for determin- istic modeling, this physically grounded model has recently been extended for statistical channel modeling to characterize random channel v ariations caused by factors like the local mov ement of users [100], [335]. The field-response framework is general and applicable to both narrowband and wideband systems, as well as to far-field and near-field propagation conditions. For wideband scenarios, the model is extended by incorporating distinct path responses and field response vectors (FR Vs) for each delay tap [324]. Under near-field conditions, spherical wa ves are used in place of the planar wa ve assumption [98], [99], [334]. In 6DMA systems, the path response matrix further depends on antenna orientation matrices, capturing radiation pattern and polarization effects [93]–[95], [336], [337]. The main challenge of this model is its analytical and computational complexity , which gro ws with the number of path parameters inv olved. Other statistical channel models, such as those based on spatial correlation, offer an alternative approach [338], [339]. These models are valuable for their analytical tractability and can offer robustness to modeling inaccuracies when their statistical assumptions are valid [340]–[344]. Classical models like Jak e’ s model and its various refinements ha ve been applied to MA-aided wireless systems, especially in rich scatter- ing en vironments, by employing statistical distributions (e.g., Rayleigh or Rician fading) and spatial-temporal correlation functions to describe the channel’ s evolution as the antenna mov es [126], [345]. Howe ver , a key limitation is that they often overlook the detailed influence of antenna radiation patterns and deterministic multipath structures. As such, these statistical models can be viewed as approximations of the more general field-response channel model, particularly under conditions in volving a large number of randomly distributed multipath components [91]. 20 3) Channel Acquisition: T o fully exploit the spatial DoFs via antenna movement optimization, it is essential to acquire instantaneous/statistical CSI between an y two points within the transmitter and recei ver antenna moving regions in MA-aided wireless communication systems [346]–[348]. This process in v olves constructing a channel mapping ov er the antenna moving regions. The choice of channel acquisition methods is closely related to the employed channel model. Model- based channel acquisition methods are particularly suited for the field-response channel model because they exploit the underlying physical structure to estimate path parameters. In contrast, model-free channel acquisition methods are typically applied when a deterministic channel structure is unav ailable or when statistical models are used. Model-based channel acquisition techniques rely on the field-response channel model. The main objectiv e is to es- timate the underlying field response information (FRI), which consists of wave vectors determined by AoAs/AoDs as well as the path response matrix (PRM), using a limited number of channel measurements at selected antenna positions. Lever - aging the inherent angular sparsity of dominant propagation paths [346], [347], [349], [350], compressed sensing tech- niques (such as orthogonal matching pursuit (OMP) [351]) can be employed to recov er the FRI based on the channel mea- surements at selected antenna positions [352]. An alternativ e model-based approach lev erages tensor decomposition [349]. By arranging the MA measurement positions in a uniform planar array (UP A) configuration, the recei ved pilot signals can be structured into a multi-dimensional tensor . This tensor can then be processed using decompositions such as the canonical polyadic decomposition to extract wav e vector information. This method enables grid-free and super-resolution estimation of wave vectors, particularly ef fectiv e in high-SNR scenarios. These model-based methods significantly reduce measurement ov erhead, as the number of parameters to estimate depends on the number of dominant paths rather than the size of the mov ement region. Howe v er , the accuracy of these methods is highly dependent on the validity of the underlying channel model and can degrade significantly in the presence of model mismatches or measurement noise. On the other hand, model-free channel acquisition methods do not rely on a predefined channel structure. Instead, they in v olve directly sampling the channel at discrete positions and interpolating or predicting the channel at unmeasured locations [353]–[361]. Basic interpolation techniques may set the chan- nel at an unmeasured position to be equal to that of its nearest measured position [353], [354]. Moreover , the Bayesian linear regression method treats the channel as a Gaussian random field and uses channel measurements at discrete positions to update a posterior distribution o ver the entire channel map [360], [362]. Additionally , machine learning-based methods hav e been proposed, in which neural networks are trained using datasets of channel measurements at discrete positions to predict channel at unmeasured positions [356]–[359]. Model- free methods are more robust to modeling inaccuracies and are particularly effecti ve in low-dimensional or small movement regions. Howe ver , since accurate interpolation or prediction of the channel at unmeasured positions typically requires dense (sub-wa velength order) spatial sampling, the measurement ov erhead of model-free channel acquisition methods generally scales with the size and dimensionality of the mo vement region. 4) Antenna Movement Optimization: Practical and efficient antenna movement strategies are crucial for optimizing MA systems, which should be determined based on the type of acquired CSI and the associated time and energy overheads of antenna mov ement. Channel-based optimization strategies lev erage acquired CSI to optimize antenna movement. These strategies aim to optimize antenna positions for objecti v es such as maximizing received SNR [91], [363], mitigating inter- ference, enhancing MIMO capacity [92], [100], or achieving flexible beamforming [325]–[327]. Howe ver , the underlying optimization problems are typically non-con ve x due to the complex and nonlinear relationship between antenna positions and communication objectiv es. T o address this, a variety of algorithms have been explored, including local optimization methods such as gradient-based [93], [131], [159], [324], [364] and successiv e conv ex approximation (SCA) techniques [92], [157], [326], [327], as well as global optimization approaches like particle sw arm optimization [138], [146], [365] and graph- theoretic methods [366], [367] tailored for discretized antenna mov ement regions. Another approach formulates the opti- mization of antenna positions as a sparse recovery problem, in v olving creating a dictionary of candidate antenna positions and employing greedy pursuit algorithms to select the subset of positions that maximizes the system objectiv e like the sum-rate [331], [332]. More recently , AI techniques [90], [368] have emerged as promising tools for learning ef fectiv e antenna movement strategies, even in scenarios with limited or implicit CSI, thereby bridging the gap with model-based training paradigms. Antenna position optimization can be based on either instan- taneous [92] or statistical CSI [93], [100]. Instantaneous CSI- based optimization enables real-time adaptation to prev ailing channel conditions and is particularly effecti ve in quasi-static en vironments with long channel coherence times, where the ov erhead associated with channel estimation, computation, and mechanical repositioning is manageable. In contrast, in fast- fading en vironments, the frequent need for CSI acquisition and antenna movement may lead to e xcessiv e overhead. In such scenarios, statistical CSI-based approaches are more appropriate [141], [142]. These methods optimize antenna po- sitions based on long-term performance metrics (e.g., ergodic capacity) by leveraging stable statistical characteristics of the channel, including AoD/AoA distributions and spatial corre- lation, thereby reducing the frequency of antenna movement while still exploiting spatial DoFs. Practical constraints are critical in antenna movement de- sign. Ke y factors include movement speed, which determines how quick the MA system can be reconfigured; movement time and associated po wer consumption, which are particularly significant for energy-constrained systems; and the av ailable 1D/2D/3D translation and/or rotation range [369]–[372]. Addi- tionally , movement accuracy is essential, as positioning errors on the order of the wav elength can significantly degrade the expected performance gains [373]. As a result, effecti ve MA 21 -15 -10 -5 0 5 10 15 SNR (dB) 2 4 6 8 10 12 MIMO Capacity (bps/Hz) MA RA MRA FPA Fig. 10. Comparison of MIMO capacity for MA and RA systems versus SNR. system design must achieve a balance between communication performance improvements and the mechanical and energy costs of antenna movement. Achieving this balance often requires customized hardware architectures and intelligent scheduling mechanisms to ensure efficient and reliable opera- tion. C. P erformance Comparison While both MA/6DMA and RA aim to enhance wireless system performance by introducing additional DoFs, their fundamentally different operational mechanisms lead to dis- tinct advantages and trade-offs. This section compares their performance under various scenarios, highlighting how their unique characteristics influence system-lev el performance. T o ev aluate and compare the performance of MA-aided and RA-aided wireless communication systems, we show in Fig. 10 the capacity of MA-MIMO, RA-MIMO, movable and reconfigurable antenna (MRA)-MIMO, and FP A-MIMO sys- tems versus the a verage SNR. All the MIMO systems employ 4 transmit antennas and 4 receiv e antennas. W e consider the geometric channel model with 5 channel paths. The total channel po wer is normalized as 1 , and the ratio of the average power between LoS and NLoS paths is set as 10 dB. The AoDs and AoAs for all paths are modeled as independent and identically distributed (i.i.d.) random variables, uniformly distributed over [0 , 150 ◦ ] . For the MA and MRA systems, the antennas can be moved within a square region of size 3 λ × 3 λ , where λ is the wav elength. A minimum distance of λ/ 2 is required between any two antennas at the same side to av oid coupling. The four systems are configured as follows: (i) MA: The antennas hav e a fixed isotropic radiation pattern. Their positions are iteratively searched within the giv en move- ment region to maximize the MIMO capacity; (ii) RA: The transmit and receiv e antennas form two uniform linear arrays (ULAs) with λ/ 2 inter-antenna spacing. Each antenna has three candidate reconfigurable directional radiation patterns [374]. The radiation pattern of each antenna is iterativ ely searched to maximize capacity; (iii) MRA: The antennas have 30 60 90 120 150 180 Angular span of user distribution (degrees) 1 2 3 4 5 6 7 Minimum achievable rate (bps/Hz) MA-instantaneous MA-statistical RA-instantaneous FPA-dense FPA-sparse Fig. 11. Comparison of minimum achiev able rate for MA and RA systems versus angular span of user distrib ution. the same reconfigurable pattern as the RA system. A two- stage alternating optimization is performed: First, the antenna positions are iteratively searched with a fixed default radiation pattern; second, using these optimized positions, the antenna radiation patterns are then iterativ ely searched; (iv) FP A: The transmit and recei ve antennas form two ULAs with λ/ 2 inter- antenna spacing, where each antenna has a fixed isotropic radiation pattern. As shown in Fig. 10, the MA, RA, and MRA systems all substantially outperform the con ventional FP A system, demonstrating the significant potential of adapting antenna positions or radiation patterns to enhance wireless commu- nication performance. Specifically , the superior performance of MRA ov er RA rev eals that incorporating the additional DoFs of antenna movement into RA systems yields additional capacity gains. Furthermore, the system performance across different SNR re gimes reveals fundamental trade-of fs between RA and MA systems. In the low-SNR regime, the MRA system outperforms the MA system. This is because MIMO systems typically transmit a single data stream under low- SNR conditions, and both MRA and RA can reconfigure their radiation patterns to enhance the beamforming gain along the LoS path. In contrast, in the high-SNR regime, the MA system achie ves superior performance over both RA and MRA systems. This is because the MA system optimizes the positions of its isotropic antennas, allowing it to fully le v erage the rich multipath environment from all angular directions to effecti vely decorrelate channel paths and maximize spatial multiplexing gain. The MRA system, howe v er , is constrained to a limited set of pre-defined directional radiation patterns. This inherent directionality can be a disadvantage for spatial multiplexing, as each antenna focuses on a specific angular sector and becomes less sensitiv e to signal paths arriving from other directions. Consequently , in this high-SNR scenario where maximizing multiplexing gain is critical, the MA system holds an advantage over the MRA system due to its ability to fully exploit the spatial characteristics of the channel. T o e v aluate and compare the performance of MA-aided and 22 RA-aided multiuser wireless communication systems, Fig. 11 shows the minimum achiev able rate versus the angular span of user distrib ution. W e consider a do wnlink multiuser system where a BS, equipped with 4 antennas, serves 2 single-FP A users. The users are randomly distributed along a circular arc with a radius of 50 m centered at the BS. The transmit SNR is set to 100 dB, and the carrier wavelength is λ = 0 . 05 m. Zero- forcing (ZF) beamforming is employed at the BS. In the MA schemes, the BS antennas are mov able along a linear segment of length 4 λ . The fiv e schemes are configured as follows: (i) MA-instantaneous: Antenna positions are iterativ ely searched for each random user location realization to maximize the instantaneous minimum achiev able rate; (ii) MA-statistical: Antenna positions are optimized once for a given angular span by maximizing the av erage minimum achiev able rate over a large number of randomly generated user distributions within that span; (iii) RA: The BS antennas form a ULA with λ/ 2 spacing. Each antenna has three selectable directional radiation patterns [374], which are iterativ ely selected to maximize the instantaneous minimum achiev able rate; (iv) FP A-dense: A fix ed ULA with λ/ 2 inter -antenna spacing and isotropic radiation patterns; (v) FP A-sparse: A fix ed ULA with 2 λ inter - antenna spacing and isotropic radiation patterns. As shown in Fig. 11, both MA and RA schemes signif- icantly outperform the FP A schemes, which highlights the performance enhancement of adapting the antenna array to user distribution. Additionally , the performance of all schemes generally improv es with increasing angular span, as larger user angular separation reduces channel correlation, thereby enhancing the effecti v eness of ZF-based spatial multiplexing. Notably , the performance of the MA-statistical scheme closely approaches that of the MA-instantaneous scheme, demonstrat- ing the practical effecti veness of statistical CSI-based antenna position optimization without requiring frequent repositioning. Furthermore, the MA schemes outperform the RA scheme at smaller angular spans, where users’ channels tend to be highly correlated. In this regime, optimizing MAs’ positions can effecti v ely reduce inter -user channel correlation, which is more beneficial than reconfiguring radiation patterns. In contrast, when the angular span becomes lar ger , users’ channels are inherently less correlated due to increased spatial separation. In this case, the RA scheme can more effecti v ely enhance the receiv ed signal strength by reconfiguring distinct directional radiation patterns tow ard different users, leading to improved achiev able rate performance. Lessons Learned : This section highlights that RA and MA provide complementary advantages. RA enables rapid control of EM properties to achieve ener gy focusing, whereas MA lev erages large-scale spatial channel v ariations through physical repositioning to enhance spatial decorrelation. This giv es rise to a fundamental performance trade-off: RA is well-suited for maximizing beamforming gain in low-SNR or LoS-dominant scenarios, while MA is more effecti ve in maximizing spatial multiplexing and mitigating interference in high-SNR, multipath-rich environments. The primary de- sign challenges for both technologies lie in devising efficient channel acquisition methods and low-complexity optimization strategies to fully exploit their practical potential. Moreover , the integration of RA and MA technologies of fers a promising path forward, enabling the joint optimization of their com- plementary strengths to realize highly adapti ve and efficient communication systems. I V . R A A N D M A F O R W I R E L E S S S E N S I N G A N D I S AC A. RA for W ir eless Sensing and ISAC RA introduces additional DoFs that enhance the perfor- mance of wireless sensing and ISAC systems. By dynamically adjusting its EM properties like radiation patterns, a single RA can fulfill functions that conv entionally require multiple antennas such as AoA estimation, thereby improving sensing accuracy and enabling more flexible ISAC operations. 1) Reconfigurable Elements-aided W ir eless Sensing: The use of RAs in wireless sensing has been extensi vely studied, with numerous implementations enhancing capabilities such as AoA estimation and localization [375]–[401], as summarized in T able V. The primary adv antage of RA in wireless sensing lies in its ability to equip a single antenna with angular resolution. T wo prominent RA-based sensing architectures are pattern-RAs and leaky-wa ve antennas (L W As). Pattern-RA, often implemented using electronically ES- P AR designs, consists of a single active radiating element surrounded by passive parasitic elements. By dynamically tuning the reactance of these passi v e elements, pattern-RA can steer the radiation beams directionally , enabling frequency- independent AoA estimation [375]–[382], [392], [393]. The study in [375] represents one of the earliest attempts to apply pattern-RAs for AoA estimation using the multiple signal classification (MUSIC) algorithm. In [376]–[378], compressed sensing frameworks were dev eloped for pattern-RA-enabled AoA estimation by formulating the problem with sparse representation. The work in [392] proposed a new single- anchor indoor localization concept based on pattern-RAs. In [379], it was demonstrated how a pattern-RA can be used for 2D AoA estimation using only received signal strength (RSS) values. The study in [380] sho wed how pattern-RA- enabled AoA estimation in WSN nodes can be improved by applying an interpolation algorithm to radiation patterns recorded during the calibration phase of the AoA estimation process. In [381], the authors demonstrated that pattern-RA- based AoA estimation in WSNs can be improv ed by applying a support vector classification approach to RSS values recorded at the antenna’ s output port. The work in [382] showcased how pattern-RAs can facilitate a rapid optimal beam selection process at mmW av e frequencies. Finally , in [393], the authors presented improvements to a calibration-free single-anchor indoor localization algorithm designed for BSs equipped with pattern-RAs. Despite these advancements, it is important to note that pattern-RAs are typically limited to discrete beam orientations, resulting in relativ ely lower angular resolution. In contrast, L W As exploit wa ve leakage along a guiding structure to generate radiation beams whose direction depends on the operating frequency . This frequency-dependent steering allows L W As to achieve higher angular resolution through continuous frequency scanning, where distinct angles are mapped to specific signal frequencies [383]–[389], [394]. The 23 T ABLE V S U MM A RY O F R A F O R W IR E L E SS S E NS I N G . Sensing T ask T ype Pattern-RA Leak y-wa ve Antenna Sectorized Antenna AoA Estimation [375]–[382] [383]–[389] [390], [391] Localization [392], [393] [394] [395]–[397] study in [383] represents one of the earliest efforts to apply L W As for AoA estimation, utilizing a composite right/left- handed (CRLH) L W A. In [384], the authors proposed a mod- ified unitary MUSIC algorithm for a two-port CRLH L W A. The work in [394] addressed L W A-assisted low-comple xity algorithms and ev aluated the practical performance of lo w- complexity cognitive radio primary user (PU) AoA estimation and PU localization using real-world indoor measurement data. In [385], the authors deri v ed the Cram ´ er–Rao bound (CRB) for MUSIC-based AoA estimation with L W As and presented an extensi ve performance ev aluation of the MUSIC algorithm. In [386], the synthesis of frequency-scanned monopulse radiation patterns using an array of two L W As was demonstrated, along with a method to estimate the AoA of an incoming beacon signal composed of prescribed tones distributed within the scanning band. In [387], an improved L W A-enabled AoA estimation method based on the rotational in v ariance technique was proposed. The authors of [388] introduced a nov el L W A- based Bluetooth beacon, enabling a lo w-cost direction estima- tion system. Lastly , [389] proposed a joint AoA and carrier frequency of fset estimation scheme using L W As for industrial Internet of Things systems. Compared to pattern-RAs, a key limitation of L W As w orth mentioning is their reliance on large operational bandwidths for high-resolution sensing, which may not be suitable for bandwidth-constrained scenarios. Sectorized antennas (SAs) have also been explored in the RA-based sensing literature, abstracting the benefits of re- configurability regardless of implementation specifics [390], [391], [395]–[397]. SAs operate by selectiv ely receiving sig- nals from predefined spatial sectors (continuous angular re- gions) while attenuating out-of-sector signals. Their analog nature ensures that only one sector is active at a time, providing directional precision. In [395], the authors proposed a lo w-complexity algorithm for SAs that pro vides coarse RSS and AoA estimates, deriving asymptotic bounds for its mean square error (MSE) as a function of the antenna parameters. In [396], the authors presented an analytical performance ev al- uation of PU RSS/AoA estimation and localization through cooperating cogniti ve radios. The study in [390] introduced a high-performance AoA estimator for SAs that does not require cooperation between the transmitter and the localizing network, was broadly applicable to different SA types and signal wa veforms, and had low computational complexity . In [397], the authors deriv ed the CRB on RSS/AoA estimation based on sector powers, studied its asymptotic behavior , and compared the MSE performance of a practical SA-based AoA estimator to the deriv ed CRB. Lastly , [391] explored the use of drone formations equipped with SAs to navigate tow ard a transmitter using AoA, facilitating search-and-rescue applications. Notably , switched-beam antennas (SBAs), which employ analog phase control networks to switch between fixed beam patterns, are occasionally classified as SAs in certain sensing contexts [402], [403]. Howe ver , SB As lack EM domain reconfigurability , as their beam steering relies on phased array techniques rather than dynamic modifications of the antenna’ s EM properties. Consequently , SB As are e xcluded from discussions of sectorized antennas in RA-based sensing. 2) Extension to IRS-aided W ireless Sensing: IRS tech- nology has emerged as a promising solution for enhancing wireless sensing capabilities and promoting the dev elopment of ISAC systems. By manipulating the propagation environ- ment through reconfigurable metasurfaces, IRS facilitates the creation of virtual LoS paths, thereby addressing inherent challenges in traditional sensing and ISA C scenarios, such as blockages, sev ere path loss, and limited coverage [41]. a) IRS-aided W ir eless Sensing: The capability of IRS to manipulate EM signals offers a promising new avenue for improving radar sensing performance. In single-target sensing scenarios, the authors in [404] proposed deploying an IRS near the radar recei ver to precisely adjust the phase of reflected signals, thus enabling in-phase superposition of echoes and significantly enhancing the received radar power . T o address the challenge of radar blind-spot detection, IRS can establish virtual LoS links, thereby enabling ef fecti ve target detec- tion [405] and accurate parameter estimation [406] in NLoS areas. In multi-target sensing scenarios, the authors in [407] demonstrated that deploying an IRS on the radar side can establish additional echo paths, thereby effecti vely enhancing the radar’ s multi-target detection capabilities. Howe ver , when multiple targets share the same direct radar-IRS link, it is typically difficult to distinguish between targets in the spatial domain. T o address this issue, the authors in [408] proposed a protocol based on time-domain and symbol-domain techniques to distinguish multiple targets, thereby expanding the sensing cov erage in multiuser scenarios. Ne v ertheless, in passi ve IRS- assisted sensing architectures, the sensing signal typically undergoes multiple reflections and suf fers from significant path loss, resulting in limited sensing SNR. T o mitigate this issue, semi-passiv e IRS-assisted sensing architectures enable direct reception of echo signals reflected from targets [41], [409]. As a result, the propagation path is reduced from triple to double reflections, thus enhancing the receiv ed SNR and improving sensing accuracy . From another perspective, con ventional IRS-aided sensing systems deploy IRSs as anchor nodes, relying on target- reflected echo signals for detection. Howe v er , this approach faces inefficiency when targets exhibit limited radar cross- section (RCS). T o ov ercome this limitation, target-mounted IRS has emerged as a novel paradigm, where IRS is directly integrated onto the target [410]–[412]. For instance, the au- 24 thors in [411] considered a target-mounted passi ve IRS ar- chitecture that enables high-precision sensing through tensor- based algorithms, even under limited receiver deployment. In addition, target-mounted IRS offers a nov el and cost-efficient solution for enhancing anti-detection capabilities in secure sensing and communication systems [413]. By dynamically reconfiguring the reflection of incident EM wav es, a target- mounted IRS can suppress radar echoes to achie v e EM stealth or redirect them to generate decepti ve signals for spoofing purposes [414]–[417]. This enables the target to ev ade or mislead adversarial detection with high adaptability across temporal, frequency , and spatial domains. Meanwhile, IRS can facilitate covert communications by reinforcing signal strength at legitimate receiv ers while attenuating or random- izing signal leakage toward potential eav esdroppers [418], [419]. Compared to con ventional anti-detection techniques, target-mounted IRS offers real-time reconfigurability , ultra- low power consumption, and ease of inte gration, thereby constituting a promising enabler for intelligent anti-detection in highly dynamic wireless en vironments. b) IRS-aided ISAC: As a ke y technology for future 6G networks, ISA C still faces multi-dimensional technical challenges for effecti v e implementation, particularly suffer - ing from significant performance bottlenecks in signal cov- erage. T o address this issue, IRS can flexibly reconfigure wireless channels, thereby ef fectiv ely extending both sensing and communication coverage. In recent years, considerable efforts have also been dev oted to integrating IRS with ISAC systems [420]–[422]. In general, existing works on IRS-aided ISA C have focused on two main application scenarios. In the first scenario, IRS is primarily used to enhance communication performance, while direct transcei ver -tar get links are used for sensing [423]–[425]. Specifically , the authors in [423] concentrated on designing the transmit/recei ve beamforming matrices and the phase shifts of passiv e IRS in multiuser scenarios. The authors in [424] aimed to minimize the transmit power at the BS by jointly optimizing activ e and passive beamforming in the presence of interference introduced by the IRS. Meanwhile, the authors in [425] addressed a sum- rate maximization problem, subject to constraints on target AoA estimation performance. The second scenario primarily aims at improving the sensing performance, by establishing a virtual LoS link between the BS and the target [406], [426], [427]. For example, the authors in [426] optimized the radar beampattern to concentrate more transmit power tow ard the target, thereby enhancing sensing performance. Moreover , the authors in [427] analyzed the recei ved SINR at the BS with IRS passi v e sensing, while the authors in [406] considered the same scenario by formulating a CRB minimization problem to enhance sensing performance. Furthermore, it is worth noting that a critical advantage of IRS in ISA C is its capability to establish virtual LoS paths, simultaneously enhancing both communication reliability and sensing accuracy . By intelli- gently optimizing IRS reflection patterns, an enhanced balance can be achiev ed between communication and sensing perfor- mance [428]–[430]. In summary , IRS technology has a profound impact on wireless sensing and ISA C systems by intelligently manip- ulating the propagation environment, thereby ov ercoming tra- ditional limitations. Continued research into IRS deployment strategies, reflection design optimization, and wa v eform design will be essential to fully realizing the potential of IRS- aided wireless sensing and IRS-aided ISA C, ultimately paving the way for efficient and effecti v e next-generation wireless networks. B. MA for W ir eless Sensing and ISAC As shown in Fig. 12, MAs/6DMAs offer significant poten- tial not only for wireless communications but also for enhanc- ing wireless sensing capabilities and enabling more ef fectiv e ISA C systems. By providing the ability to dynamically opti- mize antenna positions and array geometries, MAs/6DMAs unlock ne w DoFs to improve sensing accuracy , resolution, and the syner gy between sensing and communication functions [431]. 1) Sensing: The key advantage of MAs in wireless sensing lies in their ability to enlarge the effecti ve antenna aperture for forming narrow sensing beams, as well as their capability to adapt antenna positions in response to en vironmental vari- ations [152]–[154]. This can lead to significant improvements in various sensing applications. T raditional mechanically ro- tatable radar systems, which scan sensing targets by rotating a directional antenna, represent an early form of antenna mov e- ment for sensing. MAs generalize this concept by enabling full 3D translational and rotational control of antenna elements, allowing for more flexible scanning patterns and enhanced adaptability to complex and dynamic en vironments. Besides, a closely related concept is SAR [127], where the movement of antennas over time is used to form a large aperture for high-resolution imaging. In contrast, MAs offer the poten- tial of more adapti ve aperture synthesis, supporting flexible 1D/2D/3D mov ements and real-time trajectory optimization [432]. For tar get detection, localization, and tracking, MAs can sig- nificantly enhance performance in both far -field and near-field scenarios. In far-field scenarios, MAs can enhance sensing performance by enlarging the effecti v e array aperture, which is critical for improving angular resolution and the accuracy of AoA estimation [152], [433]. In near-field scenarios, where targets are close to the antenna array , the wa vefronts are spherical and carry both range and angle information. By optimally sampling spherical wa vefronts, MA systems can accurately estimate both range and angle, resulting in superior localization precision compared to conv entional FP A arrays [153]. The ability of MAs to dynamically tailor their geom- etry enables effecti v e exploitation of the distinct propagation characteristics in both far-field and near-field scenarios for a wide range of sensing objectiv es. Sev eral design issues are critical for MA-aided sensing. First, sufficient time and an adequate mov ement region are required for the antennas to transmit and receive sensing echos as well as synthesize a desired array aperture, especially when sensing static or slowly v arying environments/tar gets. The size of the movement region directly determines the achiev able resolution. For dynamic targets, the movement speed and the 25 ... M ova bl e A nt e nna s T a r ge t ... M ova bl e A nt e nna s T a r ge t BS C om m uni c a t i on L i nk ... A oA s A oA s U s e r s MA - a i d e d S e n s i n g S y s t e m s MA - a i d e d I S A C S y s t e m s Fig. 12. Illustration of MA-aided sensing and ISA C systems. system’ s ability to predict and track target motion become essential. Moreover , the geometry of the MA array should be carefully designed to av oid grating lobes, which can lead to ambiguities in AoA estimation [152]. Lastly , accurate calibration is important to enable coherent signal processing and ensure high sensing accuracy . 2) ISAC: ISA C enables the simultaneous sensing and communication by sharing hardware and/or radio resources [434]. Giv en the advantages of MAs in enhancing spatial multiplexing and beamforming in wireless communication, as well as improving spatial resolution in wireless sensing, MA is a promising technology for ISAC applications to achieve increased design flexibility and enable combined performance gains [146], [155]–[160]. The key adv antage of MAs in ISAC systems lies in their ability to dynamically adjust antenna positions, enabling flexible trade-offs or simultaneous en- hancement of both sensing and communication performance [146], [155]–[163]. For instance, an MA array can expand its aperture to enhance sensing resolution for target detection, while optimizing the array geometry based on instantaneous or statistical CSI to enable efficient beamforming and in- terference mitigation in multiuser communication. MA-aided ISA C systems can adapt more effecti vely to varying system requirements and en vironmental conditions compared to FP A- based systems. Howe v er , the integration of MAs into ISAC systems in- troduces unique design challenges. A fundamental issue is the potentially conflicting requirements between sensing and communication [152]. For e xample, very sparse antenna arrays that support high spatial multiple xing in multiuser communica- tion can also introduce grating lobes, which cause ambiguities in sensing tasks such as target detection and localization. This trade-off necessitates the joint optimization of antenna positions, communication beamformers, and sensing wave- forms to effecti v ely balance or improve both sensing and communication performance. Additionally , the allocation of MA mov ement time and energy between sensing and com- munication must be carefully managed, especially when the two tasks operate on different timescales or have dif fering priorities. These joint optimization problems are typically high-dimensional and non-conv ex, demanding efficient and -0.9 -0.7 -0.5 -0.3 -0.1 0.1 0.3 0.5 0.7 0.9 Spatial AoA 10 -8 10 -7 10 -6 10 -5 10 -4 10 -3 MSE MA RA MRA FPA Fig. 13. Comparison of AoA estimation MSE for MA and RA systems versus the true spatial AoA. real-time algorithms for adapting to dynamic en vironments [155]. Moreo ver , the real-time antenna position optimization to support both sensing and communication tasks requires rob ust control strategies and often predicti v e capabilities to o vercome mov ement latency [155]. T o reduce antenna movement com- plexity , a promising research direction to MA-aided ISAC is dynamically reconfiguring the MA array geometry . For example, to manage the fundamental trade-off between spatial multiplexing and grating lobe suppression, we can synthesize a dense array geometry during sensing intervals to ensure high- precision sensing without ambiguities. Subsequently , the MA array can form a sparse geometry during communication inter - vals to maximize the spatial multiplexing gain for multiuser communication. Such array-sparsity adaptation allows ISA C systems to easily optimize their configuration for specific sensing or communication tasks. Finally , standardization is needed for MA-aided ISA C, including protocols for mo vement scheduling as well as joint waveform design, all of which are critical for practical deployment. 26 C. P erformance Comparison T o ev aluate and compare the performance of MA-aided and RA-aided wireless sensing systems, Fig. 13 presents the MSE of AoA estimation v ersus the true spatial AoA. A linear array consisting of 18 antennas is considered, and the MUSIC algorithm is employed for AoA estimation. The receiv e SNR is fixed at 5 dB. F our antenna configurations are considered: (i) MA: The antennas are divided into two equal groups, with one half placed at the leftmost end and the other at the rightmost end of the array segment, each forming a subarray with λ/ 2 inter-antenna spacing; (ii) RA: A ULA with λ/ 2 spacing, where the antennas are partitioned into three equal groups, each with a distinct directional radiation pattern [374]; (iii) MRA: This configuration combines the antenna placement of the MA scheme with the directional radiation patterns of the RA scheme; (iv) FP A: A ULA with λ/ 2 inter-antenna spacing and isotropic radiation patterns. As illustrated in Fig. 13, the MA scheme consistently achiev es lower MSE than the FP A scheme across the full AoA range. This is because by enlarging the effecti ve aperture, the MA scheme can achieve higher angular resolution for AoA estimation than the FP A scheme. The RA and MRA schemes exhibit a U-shaped MSE profile, i.e., achieving lower MSE near the array boresight (i.e., spatial AoA of 0 ) but higher MSE at wider angles. This is because the three reconfigurable patterns are directed toward spatial AoAs of − 0 . 5 , 0 , and 0 . 5 , thereby enhancing the effecti v e SNR for targets near these directions while reducing it elsewhere [374]. The MRA scheme, which inte grates the lar ge aperture of the MA scheme with the directional focusing capability of the RA scheme, achiev es the best performance near the center of the angular range, even surpassing the MA scheme. This shows the benefit of jointly lev eraging aperture gain and ener gy focusing. These observations rev eal a fundamental trade-off in array design for sensing applications: while a lar ger aperture ensures higher angular resolution over a wide AoA range, reconfigurable radiation patterns can further enhance performance within specific angular sectors of interest. Lessons Learned : This section demonstrates that RA and MA provide distinct advantages for sensing applications. RA enables a single element to achiev e angular resolution by reconfiguring its radiation pattern, whereas MA synthesizes a larger effecti ve aperture through physical mov ement. This leads to a fundamental trade-off: MA offers consistently high angular resolution across a wide angle, while RA achie ves superior estimation accuracy within specific angular sectors by focusing energy . Moreover , a hybrid MRA system that integrates and jointly optimizes both functionalities could achiev e unparalleled performance, combining the wide-angle and high-resolution capability of MA with the ability of RA to enhance sensing accuracy in selected angular sectors. V . F U T U R E W O R K S The development of RA and MA/6DMA is promising for enhancing wireless communication and sensing systems. Howe v er , to fully unlock their potential and enable widespread practical deployment in future wireless networks such as 6G, sev eral research challenges and opportunities need to be addressed. This section outlines key directions for future in vestig ation. A. Efficient Antenna Ar chitectur es T o enable the practical implementation of RA and MA systems, efficient antenna architectures are essential to en- hance system performance, reduce cost, and support broader deployment. Future research in RA architectures should focus on de veloping novel tunable materials that provide faster switching speeds, wider reconfiguration ranges, lower losses, and reduced po wer consumption compared to current tech- nologies such as liquid crystals and ferrites. Advances in MEMS and nano-electromechanical system (NEMS) could en- able more compact and efficient reconfiguration mechanisms. Additionally , the de velopment of multi-functional RAs capable of simultaneously adjusting multiple parameters is a promising research direction. For MA, the development of more compact, energy- efficient, and faster mechanical actuation technologies is es- sential. This includes research into smart materials (e.g., shape memory alloys and piezoelectric actuators) and advanced robotic systems that can provide precise multi-dimensional mov ement with minimal ov erhead. A key focus is creat- ing scalable architectures, such as mov able subarrays or cross-linked MA arrays [435], which aim to achiev e near- optimal communication and sensing performance with the least possible mov ement complexity . Additionally , dev elop- ing lightweight, robust, and easily deployable MA arrays lev eraging origami-inspired foldable structures or inflatable technologies is important for their integration into div erse platforms, such as mobile devices, U A Vs, and BSs. A particularly promising direction is the development of integrated RA and MA architectures. In such hybrid sys- tems, each RA element or the RA array can be physically mov ed, combining the rapid, fine-grained reconfigurability of RAs with the slo wer but larger -scale spatial optimiza- tion of MAs. Ho wev er , realizing such integrated systems will in volv e significant challenges, including the co-design of reconfiguration and mov ement mechanisms, mitigation of mutual interference, assurance of energy efficienc y , and the dev elopment of hierarchical control frameworks to coordinate their operation. A practically critical issue is the management of dynamic EM coupling, as changes in antenna states or positions modify the mutual coupling between antennas. This giv es rise to a complex and high-dimensional EM problem that must be addressed in both hardware design and signal processing to ensure system stability and performance in dense hybrid arrays. Moreover , in hybrid RA/MA architectures, an important open challenge lies in the design of hierarchical and cross-layer control frameworks. In particular , it remains unclear how to jointly control the MA and RA layers. For example, large-scale statistical CSI av ailable at the MA layer may be lev eraged to guide or constrain the adaptation space of the RA configurations, while the rapid state changes of the RA may need to be abstracted or decoupled from the MA movement optimization to av oid excessi ve signaling and 27 control ov erhead. Addressing such cross-layer control and information-coupling issues is a promising direction for future research. B. Channel Estimation/Acquisition for RA and MA Systems Accurate and ef ficient channel knowledge is essential to fully exploit the DoFs of fered by RA and MA systems. F or RA systems, future work should focus on fast channel estimation techniques tailored to their specific reconfigurable parameters. This includes methods for ef ficiently learning how the channel responds to variations in antenna parameters, such as beam patterns or polarization states, potentially lev eraging com- pressed sensing or AI-driv en approaches to reduce the training ov erhead associated with numerous RA configurations. For MA systems, although both model-based and model- free channel acquisition methods have been explored, signifi- cant challenges remain [346], [347], [349], [353], [354], [356], [357], [360], [362]. In particular, reducing the overhead of channel acquisition ov er large or high-dimensional movement regions is critical [346], [347]. Robust acquisition methods that can tolerate positioning inaccuracies or operate during continuous movement are essential. Furthermore, considering that model-based algorithms are sensitive to MAs’ positions and orientations, it is crucial to develop schemes that are resilient to positioning and orientation inaccuracies, or those that jointly estimate these inaccuracies alongside the channel parameters to mitigate calibration-related performance degra- dation. Moreover , statistical channel acquisition techniques that capture long-term spatial characteristics without requir- ing exhausti ve instantaneous measurements are important for reducing the overhead of frequent antenna movement [100]. Channel acquisition with antenna rotation also needs further in vestig ation by exploiting directional sparsity [245], [246]. For integrated RA and MA systems, channel acquisi- tion becomes exceptionally challenging due to the high- dimensional channel space, which varies with both physical position/orientation and the internal antenna state. Dev eloping nov el frameworks that can efficiently represent and estimate such high-dimensional and configuration-dependent channels remains a key open research direction. C. Low-complexity Antenna Configuration/Movement Strate- gies Optimizing the state of RAs or the position/orientation of MAs can be computationally intensiv e, necessitating the de- velopment of low-complexity strategies suitable for real-time implementation. For RA systems, it is important to dev elop efficient algorithms to select optimal antenna configurations based on limited channel acquisition or learned en vironment- specific policies. AI-based techniques are promising for en- abling RA to autonomously adapt its states with reduced computational overhead and without requiring full CSI. For MA systems, it is important to acquire antenna posi- tions using low-o verhead channel acquisition techniques and low-comple xity antenna position optimization methods [363]. Future research should focus on efficient algorithms that can obtain effecti ve MA positions with minimal time overhead. A crucial challenge lies in managing movement overhead [369], [370], [372], where intelligent control strategies must determine ho w to mov e antennas by explicitly balancing the trade-offs between performance gains and the associated costs in energy consumption, latency , and computational complexity [371]. Furthermore, optimization strategies should account for the physical dynamics of the motors and actuators. Practical mechanical constraints such as inertia, settling time, friction, and gear backlash are critical factors that affect the feasibility of rapid and precise antenna movement/rotation. Therefore, future research should dev elop motion-aware optimization framew orks that integrate these mechanical realities into the antenna mo vement/rotation scheduling process. Trajectory op- timization of multiple MAs without antenna coupling is an- other critical area [371]. Additionally , tailored optimization framew orks for MAs with constrained mobility (e.g., linear sliding arrays or group-based MAs [260], [266], [436], [437]) can reduce control complexity while still achie ving significant performance gains. For integrated RA and MA systems, hierarchical control and optimization strategies are promising for reducing control complexity . Such strategies may in v olv e optimizing MA posi- tions based on large-scale or statistical channel characteristics ov er longer timescales, while RA configurations are adjusted more rapidly in response to instantaneous or local channel conditions. D. Syner gy with Other T echnolo gies and Applications The full potential of RA and MA systems can be realized through their synergy with other emerging wireless technolo- gies and applications. 1) Mobile Edge and Over-the-Air Computing: The inter- action between RA/MA and mobile edge computing (MEC) is particularly promising [438]–[441]. MAs can dynamically optimize links to edge servers for ef ficient computation of- floading, while RAs can adapt beam patterns to support mobile users accessing MEC services. Another related area is ov er-the-air computation (AirComp), where MAs can reshape wireless channels to improve the accuracy of distributed data aggregation at a sink node [442]–[444]. 2) Physical Layer Security (PLS): RAs/MAs offer new opportunities for PLS by reconfiguring channels to enhance the link to a legitimate receiv er while simultaneously degrading the link to an eav esdropper [365], [445]–[450]. By jointly opti- mizing beamformers and antenna states/positions, it is possible to improve secrecy rates, ev en when the ea vesdropper’ s CSI is unav ailable [451]–[453], or to enhance covert communications [454]–[457]. 3) W ir eless P ower T r ansfer (WPT): In WPT and simulta- neous wireless information and power transfer (SWIPT) sys- tems, RAs/MAs can improv e energy transmission efficienc y [163], [458]–[460]. Antenna states/positions can be optimized to balance the trade-of f between maximizing the SINR for information decoding and maximizing the recei ved power for energy harvesting [461]–[467]. An interesting direction is the potential of MA systems to harvest energy from their own mechanical movement by integrating piezoelectric or kinetic 28 harvesters into the actuation mechanism. This harvested en- ergy could potentially power low-ener gy RA reconfiguration circuits or other low-po wer electronics, thereby creating more self-sustaining and autonomous wireless systems. 4) Next-Gener ation Multiple Access (NGMA): NGMA schemes, such as rate-splitting multiple access (RSMA) [468] and NOMA [469], [470], can benefit from RA/MA technol- ogy . By adjusting antenna states/positions to create fav orable channel conditions that either reduce inter-user correlation for spatial di vision multiple access or increase it for selected user subsets to improv e the performance of NOMA and RSMA [471]–[478]. 5) AI and Larg e Language Models (LLMs): AI techniques are crucial for managing the complexity of RA/MA systems [90], [368], [479]–[486]. The emergence of LLMs offers new possibilities for generating adaptiv e control policies for RA state selection and MA movement in real-time, responding to dynamic en vironments and system requirements [487], [488]. For example, an LLM could process a high-lev el natural language command and subsequently translate this intent into a multi-variable optimization policy for the joint control of RA states and MA positions. This enables the MA/RA system to respond dynamically to complex en vironmental conditions and human-centric objectives without relying on manual con- figurations. V I . C O N C L U S I O N S This paper has provided a comprehensiv e survey on the fundamentals, architectures, and applications of RA and MA technologies. W e began by revie wing the historical de velop- ment of both RA and MA technologies, tracing their par- allel evolution and highlighting their promising application scenarios in future wireless networks. W e then presented a detailed overvie w of the hardware architectures for both RAs and MAs, cov ering their classification, implementation meth- ods, and a comparative analysis of their distinct mechanisms and performance metrics. Subsequently , we focused on the application of RAs and MAs in wireless communications, examining their respective performance benefits and design methodologies. The discussion was then extended to wireless sensing and ISAC, re vie wing RA- and MA-enabled techniques and their unique advantages. W e also presented numerical performance comparisons to illustrate the distinct and com- plementary characteristics of RA and MA systems in various scenarios. Finally , we outlined key challenges and identified promising future research directions. As the exploration of RA and MA technologies is still in its early stage, we hope this survey will serve as a valuable resource for researchers and practitioners, inspiring further innov ations to unlock the full potential of these promising technologies in realizing intelligent and adaptive wireless networks. R E F E R E N C E S [1] E. T elatar , “Capacity of multi-antenna Gaussian channels, ” Eur opean T r ans. T elecommun. , vol. 10, no. 6, pp. 585–595, No v . 1999. [2] A. Paulraj, D. Gore, R. Nabar , and H. Bolcsk ei, “ An ov erview of MIMO communications - a key to gigabit wireless, ” Pr oc. IEEE , vol. 92, no. 2, pp. 198–218, Feb . 2004. [3] G. Stuber, J. Barry , S. McLaughlin, Y . Li, M. Ingram, and T . Pratt, “Broadband MIMO-OFDM wireless communications, ” Pr oc. IEEE , vol. 92, no. 2, pp. 271–294, Feb . 2004. [4] A. Goldsmith, W ir eless communications . New Y ork, USA: Cambridge Univ . Press, 2005. [5] D. Tse and P . V iswanath, Fundamentals of W ir eless Communication . New Y ork, USA: Cambridge Uni v . Press, 2005. [6] H. Shariatmadari, R. Ratasuk, S. Iraji, A. Laya, T . T aleb, R. J ¨ antti, and A. Ghosh, “Machine-type communications: current status and future perspectiv es toward 5G systems, ” IEEE Commun. Mag. , vol. 53, no. 9, pp. 10–17, Sep. 2015. [7] A. A. Dowhuszko, G. Corral-Briones, J. H ¨ am ¨ al ¨ ainen, and R. Wich- man, “Performance of quantized random beamforming in delay- tolerant machine-type communication, ” IEEE T rans. W ir eless Com- mun. , vol. 15, no. 8, pp. 5664–5680, Aug. 2016. [8] Y . D. Beyene, R. Jantti, K. Ruttik, and S. Iraji, “On the performance of narrow-band internet of things (NB-IoT), ” in Pr oc. IEEE W ir eless Commun. Networking Conf . , Mar. 2017, pp. 1–6. [9] P .-C. Hsieh, Y . Jia, D. Parra, and P . Aithal, “ An experimental study on coverage enhancement of L TE Cat-M1 for machine-type commu- nication, ” in Pr oc. IEEE International Conf. Commun. , May 2018, pp. 1–5. [10] M. M. Hyder, R. H. Khan, and K. Mahata, “ An enhanced random access mechanism for smart grid M2M communications in WiMAX networks, ” in Pr oc. IEEE International Conf. Smart Grid Commun. , Nov . 2014, pp. 356–361. [11] B. Ghena, J. Adkins, L. Shangguan, K. Jamieson, P . Levis, and P . Dutta, “Challenge: Unlicensed LPW ANs are not yet the path to ubiquitous connectivity , ” in International Conf. Mobile Comput. Netw . , New Y ork, NY , USA, Oct. 2019, pp. 1–12. [12] N. Xia, H.-H. Chen, and C.-S. Y ang, “Emerging technologies for machine-type communication networks, ” IEEE Network , vol. 34, no. 1, pp. 214–222, Jan. 2020. [13] X. Shao, X. Chen, and R. Jia, “ A dimension reduction-based joint activity detection and channel estimation algorithm for massiv e access, ” IEEE T rans. Signal Pr ocess. , v ol. 68, pp. 420–435, Dec. 2020. [14] X. Shao, X. Chen, Y . Qiang, C. Zhong, and Z. Zhang, “Feature-aided adaptiv e-tuning deep learning for massive device detection, ” IEEE J. Sel. Areas Commun. , vol. 39, no. 7, pp. 1899–1914, Jul. 2021. [15] E. G. Larsson, O. Edfors, F . T ufv esson, and T . L. Marzetta, “Massive MIMO for next generation wireless systems, ” IEEE Commun. Mag. , vol. 52, no. 2, pp. 186–195, Feb . 2014. [16] L. Lu, G. Y . Li, A. L. Swindlehurst, A. Ashikhmin, and R. Zhang, “ An overview of massiv e MIMO: Benefits and challenges, ” IEEE J. Sel. T opics Signal Pr ocess. , vol. 8, no. 5, pp. 742–758, Oct. 2014. [17] S. Dang, O. Amin, B. Shihada, and M.-S. Alouini, “What should 6G be?” Nature Electr onics , vol. 3, no. 1, pp. 20–29, Jan. 2020. [18] W . Saad, M. Bennis, and M. Chen, “ A vision of 6G wireless systems: Applications, trends, technologies, and open research problems, ” IEEE Network , vol. 34, no. 3, pp. 134–142, May 2020. [19] A. U. Gawas, “ An overvie w on evolution of mobile wireless com- munication networks: 1G-6G, ” Int. J. Recent Innov . T r ends Comput. Commun. , vol. 3, no. 5, pp. 3130–3133, May 2015. [20] C.-X. W ang, X. Y ou, X. Gao, X. Zhu, Z. Li, C. Zhang, H. W ang, Y . Huang, Y . Chen, H. Haas, J. S. Thompson, E. G. Larsson, M. Di Renzo, W . T ong, P . Zhu, X. Shen, H. V . Poor , and L. Hanzo, “On the road to 6G: V isions, requirements, key technologies, and testbeds, ” IEEE Commun. Surveys T uts. , vol. 25, no. 2, pp. 905–974, 2nd Quart. 2023. [21] W . Jiang, B. Han, M. A. Habibi, and H. D. Schotten, “The road towards 6G: A comprehensive survey, ” IEEE Open J. Commun. Soc. , vol. 2, pp. 334–366, Feb . 2021. [22] M. Z. Chowdhury , M. Shahjalal, S. Ahmed, and Y . M. Jang, “6G wire- less communication systems: Applications, requirements, technologies, challenges, and research directions, ” IEEE Open J. Commun. Soc. , vol. 1, pp. 957–975, Jul. 2020. [23] ITU-R WP5D, “Future technology trends of terrestrial international mobile telecommunications systems to wards 2030 and be yond, ” Nov . 2022. [Online]. A vailable: https://www .itu.int/pub/R- REP- M.2516 [24] A. Liu, Z. Huang, M. Li, Y . W an, W . Li, T . X. Han, C. Liu, R. Du, D. K. P . T an, J. Lu, Y . Shen, F . Colone, and K. Chetty , “A survey on fundamental limits of integrated sensing and communication, ” IEEE Commun. Surveys T uts. , vol. 24, no. 2, pp. 994–1034, 2nd Quart., 2022. [25] O. E. A yach, S. Rajagopal, S. Abu-Surra, Z. Pi, and R. W . Heath, “Spatially sparse precoding in millimeter wave MIMO systems, ” IEEE T r ans. Wir eless Commun. , vol. 13, no. 3, pp. 1499–1513, Mar . 2014. 29 [26] Y . Zeng and R. Zhang, “Millimeter wave MIMO with lens antenna array: A new path division multiplexing paradigm, ” IEEE Tr ans. Commun. , vol. 64, no. 4, pp. 1557–1571, Apr . 2016. [27] L. Zhu, J. Zhang, Z. Xiao, X. Cao, D. O. W u, and X.-G. Xia, “Millimeter-wa ve NOMA with user grouping, power allocation and hybrid beamforming, ” IEEE T r ans. W ir eless Commun. , vol. 18, no. 11, pp. 5065–5079, No v . 2019. [28] C. Lin and G. Y . L. Li, “T erahertz communications: An array-of- subarrays solution, ” IEEE Commun. Mag. , v ol. 54, no. 12, pp. 124–131, Dec. 2016. [29] I. F . Akyildiz, C. Han, Z. Hu, S. Nie, and J. M. Jornet, “T erahertz band communication: An old problem re visited and research directions for the next decade, ” IEEE T rans. Commun. , vol. 70, no. 6, pp. 4250–4285, Jun. 2022. [30] H. Lu, Y . Zeng, C. Y ou, Y . Han, J. Zhang, Z. W ang, Z. Dong, S. Jin, C.-X. W ang, T . Jiang, X. Y ou, and R. Zhang, “ A tutorial on near- field XL-MIMO communications tow ards 6G, ” IEEE Commun. Surveys T uts. , vol. 26, no. 4, pp. 2213–2257, 4th Quart. 2024. [31] Z. W ang, J. Zhang, H. Du, D. Niyato, S. Cui, B. Ai, M. Debbah, K. B. Letaief, and H. V . Poor, “ A tutorial on extremely large-scale MIMO for 6G: Fundamentals, signal processing, and applications, ” IEEE Commun. Surveys T uts. , v ol. 26, no. 3, pp. 1560–1605, 3rd Quart. 2024. [32] C. Y ou, Y . Cai, Y . Liu, M. D. Renzo, T . M. Duman, A. Y ener, and A. Lee Swindlehurst, “Next generation advanced transcei ver technolo- gies for 6G and beyond, ” IEEE J. Select. Areas Commun. , vol. 43, no. 3, pp. 582–627, Mar. 2025. [33] B. Ning, Z. Tian, W . Mei, Z. Chen, C. Han, S. Li, J. Y uan, and R. Zhang, “Beamforming technologies for ultra-massiv e MIMO in terahertz communications, ” IEEE Open J. Commun. Society , vol. 4, pp. 614–658, Feb . 2023. [34] IEEE 802.11ac, Wir eless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications: Enhancements for V ery High Thr oughput for Operation in Bands below 6 GHz , IEEE Std., Dec. 2013. [35] IEEE 802.11ax, W ir eless LAN Medium Access Contr ol (MA C) and Physical Layer (PHY) Specifications: Enhancements for High- Efficiency WLAN , IEEE Std., May 2021. [36] IEEE 802.11be, W ir eless LAN Medium Access Control (MA C) and Physical Layer (PHY) Specifications: Enhancements for Extr emely High Throughput (EHT) , IEEE Std., Jul. 2025. [37] Z. W ei, F . Liu, C. Masouros, N. Su, and A. P . Petropulu, “T oward multi- functional 6G wireless networks: Inte grating sensing, communication, and security , ” IEEE Commun. Mag. , vol. 60, no. 4, pp. 65–71, Apr . 2022. [38] S. Kim, J. Moon, J. Kim, Y . Ahn, D. Kim, S. Kim, K. Shim, and B. Shim, “Role of sensing and computer vision in 6G wireless communications, ” IEEE W ir eless Commun. , Jul. 2024. [39] R. J. Mailloux, Phased Array Antenna Handbook . 2nd ed. Norwood, MA, USA: Artech House, 2005. [40] W .-D. W irth, Radar T echniques Using Array Antennas . 2nd ed. Edison, NJ, USA: IET , 2005. [41] X. Shao, C. Y ou, and R. Zhang, “Intelligent reflecting surface aided wireless sensing: Applications and design issues, ” IEEE W ir eless Commun. , vol. 31, no. 3, pp. 383–389, Feb. 2024. [42] J. W allace and M. Jensen, “Mutual coupling in MIMO wireless systems: a rigorous network theory analysis, ” IEEE Tr ans. W ir eless Commun. , vol. 3, no. 4, pp. 1317–1325, Jul. 2004. [43] X. Chen, S. Zhang, and Q. Li, “ A revie w of mutual coupling in MIMO systems, ” IEEE Access , v ol. 6, pp. 24 706–24 719, Apr . 2018. [44] N. Amani, A. Farsaei, S. R. Aghdam, T . Eriksson, M. V . Ivashina, and R. Maaskant, “Sparse array synthesis including mutual coupling for MU-MIMO average capacity maximization, ” IEEE T rans. Antennas Pr opagat. , vol. 70, no. 8, pp. 6617–6626, Aug. 2022. [45] A. Molisch and M. W in, “MIMO systems with antenna selection, ” IEEE Microwave Mag. , vol. 5, no. 1, pp. 46–56, Mar . 2004. [46] S. Sanayei and A. Nosratinia, “ Antenna selection in MIMO systems, ” IEEE Commun. Mag . , vol. 42, no. 10, pp. 68–73, Oct. 2004. [47] R. Haupt, “Thinned arrays using genetic algorithms, ” IEEE T rans. Antennas Propa gat. , vol. 42, no. 7, pp. 993–999, Jul. 1994. [48] L. Cen, W . Ser , Z. L. Y u, S. Rahardja, and W . Cen, “Linear sparse array synthesis with minimum number of sensors, ” IEEE T rans. Antennas Pr opagat. , vol. 58, no. 3, pp. 720–726, Mar . 2010. [49] C. R. Greene and R. C. W ood, “Sparse array performance, ” J. Acoust. Soc. Am. , v ol. 63, no. 6, pp. 1866–1872, Feb. 1978. [50] W . Roberts, L. Xu, J. Li, and P . Stoica, “Sparse antenna array design for MIMO active sensing applications, ” IEEE T rans. Antennas Pr opa gat. , vol. 59, no. 3, pp. 846–858, Mar . 2011. [51] H. Gazzah and K. Abed-Meraim, “Optimum ambiguity-free directional and omnidirectional planar antenna arrays for DO A estimation, ” IEEE T r ans. Signal Pr ocessing , vol. 57, no. 10, pp. 3942–3953, Oct. 2009. [52] J. Brady , N. Behdad, and A. M. Sayeed, “Beamspace MIMO for millimeter-wa ve communications: System architecture, modeling, anal- ysis, and measurements, ” IEEE T rans. Antennas and Pr opa gat. , vol. 61, no. 7, pp. 3814–3827, Jul. 2013. [53] Y . Zeng, R. Zhang, and Z. N. Chen, “Electromagnetic lens-focusing antenna enabled massiv e MIMO: Performance improvement and cost reduction, ” IEEE J. Select. Ar eas Commun. , vol. 32, no. 6, pp. 1194– 1206, Jun. 2014. [54] L. Zhu, H. Mao, G. Y an, W . Ma, Z. Xiao, and R. Zhang, “Movable and reconfigurable antennas for 6G: Unlocking electromagnetic-domain design and optimization, ” npj W ir eless T echnology , pp. 1–10, 2025. [55] J. Costantine, Y . T awk, S. E. Barbin, and C. G. Christodoulou, “Reconfigurable antennas: Design and applications, ” Pr oc. IEEE , vol. 103, no. 3, pp. 424–437, Apr . 2015. [56] C. G. Christodoulou, Y . T awk, S. A. Lane, and S. R. Erwin, “Recon- figurable antennas for wireless and space applications, ” Pr oc. IEEE , vol. 100, no. 7, pp. 2250–2261, Jul. 2012. [57] T . T andel and S. T rapasiya, “Reconfigurable antenna for wireless communication: Recent developments, challenges and future, ” W ir eless P ersonal Commun. , vol. 133, no. 2, pp. 725–768, Dec. 2023. [58] R. B. V . B. Simorangkir , Y . Y ang, K. P . Esselle, and B. A. Zeb, “ A method to realize rob ust flexible electronically tunable antennas using polymer-embedded conductiv e fabric, ” IEEE T r ans. Antennas Pr opag . , vol. 66, no. 1, pp. 50–58, Nov . 2018. [59] S.-L. S. Y ang, A. A. Kishk, and K.-F . Lee, “Frequenc y reconfigurable U-slot microstrip patch antenna, ” IEEE Antennas Wir eless Pr opag. Lett. , vol. 7, pp. 127–129, May 2008. [60] Y . T awk and C. G. Christodoulou, “ A new reconfigurable antenna design for cognitiv e radio, ” IEEE Antennas Wir eless Propag . Lett. , vol. 8, pp. 1378–1381, Dec. 2009. [61] K. Paramayudha, S. J. Chen, W . Withayachumnankul, and C. Fumeaux, “Frequency-reconfigurable circularly polarized omnidirectional an- tenna, ” IEEE T rans. Antennas Pr opag . , vol. 70, no. 8, pp. 7205–7210, Aug. 2022. [62] N. Behdad and K. Sarabandi, “Dual-band reconfigurable antenna with a very wide tunability range, ” IEEE T r ans. Antennas Pr opag. , vol. 54, no. 2, pp. 409–416, Feb. 2006. [63] Y . T awk, J. Costantine, and C. G. Christodoulou, “A varactor-based reconfigurable filtenna, ” IEEE Antennas W ir eless Pr opag . Lett. , vol. 11, pp. 716–719, Jun. 2012. [64] A. Kantemur, J. T ak, P . Siyari, A. H. Abdelrahman, M. Krunz, and H. Xin, “A novel compact reconfigurable broadband antenna for cognitiv e radio applications, ” IEEE T r ans. Antennas Pr opag. , vol. 68, no. 9, pp. 6538–6547, Sep. 2020. [65] Y . Zhang, S. T ang, J. Rao, C.-Y . Chiu, X. Chen, and R. Murch, “ A dual-port dual-beam pattern-reconfigurable antenna with independent 2-D beam-scanning, ” IEEE T r ans. Antennas Pr opag. , vol. 72, no. 10, pp. 7628–7643, Oct. 2024. [66] T . Hahn and D. Manteuffel, “Generation of a square multi-mode multi- port aperture antenna by selecti ve modal e xcitation, ” in Pr oc. Eur . Conf. Antennas Pr opag. (EuCAP) , Glasgo w , United Kingdom, Mar . 2024, pp. 1–4. [67] N. Nguyen-Trong and C. Fumeaux, “ A multi-port pattern diversity antenna with high isolation, ” IEEE Open J. Antennas Pr opa g. , vol. 4, pp. 947–957, Sep. 2023. [68] R. Harrington, “Reactively controlled directiv e arrays, ” IEEE T rans. Antennas Propa g. , vol. 26, no. 3, pp. 390–395, May 1978. [69] P .-Y . Qin, A. R. W eily , Y . J. Guo, and C.-H. Liang, “Polarization reconfigurable U-slot patch antenna, ” IEEE T rans. Antennas Pr opa g. , vol. 58, no. 10, pp. 3383–3388, Jul. 2010. [70] Y . Zhang, Z. Han, S. Shen, C.-Y . Chiu, and R. Murch, “Polarization enhancement of microstrip antennas by asymmetric and symmetric grid defected ground structures, ” IEEE Open J. Antennas Pr opag . , vol. 1, pp. 215–223, May 2020. [71] H. L. Zhu, S. W . Cheung, X. H. Liu, and T . I. Y uk, “Design of polarization reconfigurable antenna using metasurface, ” IEEE Tr ans. Antennas Propa g. , vol. 62, no. 6, pp. 2891–2898, Jun. 2014. [72] W . Li, S. Xia, B. He, J. Chen, H. Shi, A. Zhang, Z. Li, and Z. Xu, “A reconfigurable polarization con verter using acti ve metasurf ace and its application in horn antenna, ” IEEE T r ans. Antennas Propa g. , v ol. 64, no. 12, pp. 5281–5290, Dec. 2016. 30 [73] Z. Zhang and L. Dai, “Pattern-division multiplexing for continuous- aperture MIMO, ” in Pr oc. IEEE Int. Conf. Commun. (ICC) , Seoul, K orea, Republic of, May 2022, pp. 1–6. [74] M. D. Renzo, M. Debbah, D.-T . Phan-Huy , A. Zappone, M.-S. Alouini, C. Y uen, V . Sciancalepore, G. C. Alexandropoulos, J. Hoydis, H. Gacanin, J. d. Rosny , A. Bounceur , G. Lerosey , and M. Fink, “Smart radio en vironments empo wered by reconfigurable AI meta-surfaces: An idea whose time has come, ” EURASIP J. W ir eless Commun. Netw . , no. 1, pp. 1–20, May 2019. [75] A. Pizzo, T . L. Marzetta, and L. Sanguinetti, “Spatially-stationary model for holographic MIMO small-scale fading, ” IEEE J. Select. Ar eas Commun. , v ol. 38, no. 9, pp. 1964–1979, Sep. 2020. [76] S. Hu, F . Rusek, and O. Edfors, “Beyond massiv e MIMO: The potential of data transmission with lar ge intelligent surfaces, ” IEEE T rans. Signal Pr ocess. , vol. 66, no. 10, pp. 2746–2758, May 2018. [77] C. Huang, S. Hu, G. C. Alexandropoulos, A. Zappone, C. Y uen, R. Zhang, M. D. Renzo, and M. Debbah, “Holographic MIMO surfaces for 6G wireless networks: Opportunities, challenges, and trends, ” IEEE W ir eless Commun. , vol. 27, no. 5, pp. 118–125, Oct. 2020. [78] Z. W an, Z. Gao, F . Gao, M. D. Renzo, and M.-S. Alouini, “T erahertz massiv e MIMO with holographic reconfigurable intelligent surfaces, ” IEEE T rans. Commun. , v ol. 69, no. 7, pp. 4732–4750, Jul. 2021. [79] C. Liaskos, S. Nie, A. Tsioliaridou, A. Pitsillides, S. Ioannidis, and I. Akyildiz, “ A new wireless communication paradigm through software-controlled metasurfaces, ” IEEE Commun. Mag . , vol. 56, no. 9, pp. 162–169, Sep. 2018. [80] Q. W u and R. Zhang, “Intelligent reflecting surface enhanced wireless network via joint active and passiv e beamforming, ” IEEE T rans. W ir eless Commun. , vol. 18, no. 11, pp. 5394–5409, Nov . 2019. [81] C. Huang, A. Zappone, G. C. Alexandropoulos, M. Debbah, and C. Y uen, “Reconfigurable intelligent surfaces for energy efficiency in wireless communication, ” IEEE Tr ans. W ir eless Commun. , vol. 18, no. 8, pp. 4157–4170, Aug. 2019. [82] W . Mei, B. Zheng, C. Y ou, and R. Zhang, “Intelligent reflecting surf ace- aided wireless networks: From single-reflection to multireflection de- sign and optimization, ” Pr oc. IEEE , vol. 110, no. 9, pp. 1380–1400, Sep. 2022. [83] B. Zheng, C. Y ou, W . Mei, and R. Zhang, “ A survey on channel estimation and practical passive beamforming design for intelligent reflecting surface aided wireless communications, ” IEEE Commun. Surveys T uts. , vol. 24, no. 2, pp. 1035–1071, 2nd Quart. 2022. [84] Q. W u, B. Zheng, C. Y ou, L. Zhu, K. Shen, X. Shao, W . Mei, B. Di, H. Zhang, E. Basar , L. Song, M. D. Renzo, Z.-Q. Luo, and R. Zhang, “Intelligent surfaces empowered wireless network: Recent advances and the road to 6G, ” Pr oc. IEEE , vol. 112, no. 7, pp. 724–763, Jun. 2024. [85] Y . Liu, X. Liu, X. Mu, T . Hou, J. Xu, M. Di Renzo, and N. Al-Dhahir , “Reconfigurable intelligent surfaces: Principles and opportunities, ” IEEE Commun. Surveys T uts. , v ol. 23, no. 3, pp. 1546–1577, 3rd Quart. 2021. [86] L. Pulido-Mancera, T . Fromenteze, T . Sleasman, M. Boyarsky , M. F . Imani, M. Reynolds, and D. Smith, “ Application of range migration algorithms to imaging with a dynamic metasurface antenna, ” J. Opt. Soc. Am. B , vol. 33, no. 10, pp. 2082–2092, Dec. 2016. [87] N. Shlezinger , O. Dick er , Y . C. Eldar , I. Y oo, M. F . Imani, and D. R. Smith, “Dynamic metasurface antennas for uplink massive MIMO systems, ” IEEE T rans. Commun. , vol. 67, no. 10, pp. 6829–6843, Oct. 2019. [88] R. Deng, B. Di, H. Zhang, D. Niyato, Z. Han, H. V . Poor, and L. Song, “Reconfigurable holographic surfaces for future wireless communications, ” IEEE Wir eless Commun. , vol. 28, no. 6, pp. 126– 131, Dec. 2021. [89] R. Deng, B. Di, H. Zhang, Y . T an, and L. Song, “Reconfigurable holographic surface: Holographic beamforming for metasurface-aided wireless communications, ” IEEE T rans. V eh. T echnol. , vol. 70, no. 6, pp. 6255–6259, Jun. 2021. [90] L. Zhu, W . Ma, and R. Zhang, “Movable antennas for wireless communication: Opportunities and challenges, ” IEEE Commun. Mag. , vol. 62, no. 6, pp. 114–120, Jun. 2024. [91] L. Zhu, W . Ma, and R. Zhang, “Modeling and performance analysis for mov able antenna enabled wireless communications, ” IEEE T r ans. W ir eless Commun. , vol. 23, no. 6, pp. 6234–6250, Jun. 2024, arXiv accessed on 11 Oct. 2022. [92] W . Ma, L. Zhu, and R. Zhang, “MIMO capacity characterization for mov able antenna systems, ” IEEE T rans. Wir eless Commun. , vol. 23, no. 4, pp. 3392–3407, Apr. 2024, arXiv accessed on 11 Oct. 2022. [93] X. Shao, Q. Jiang, and R. Zhang, “6D mov able antenna based on user distribution: Modeling and optimization, ” IEEE T rans. W ir eless Commun. , vol. 24, no. 1, pp. 355–370, Jan. 2025. [94] X. Shao and R. Zhang, “6DMA enhanced wireless network with flexible antenna position and rotation: Opportunities and challenges, ” IEEE Commun. Mag . , vol. 63, no. 4, pp. 121–128, Apr . 2025. [95] X. Shao, R. Zhang, Q. Jiang, and R. Schober, “6D movable antenna enhanced wireless network via discrete position and rotation optimiza- tion, ” IEEE J. Select. Areas Commun. , vol. 43, no. 3, pp. 674–687, Mar . 2025. [96] B. Zheng, Q. W u, and R. Zhang, “Rotatable antenna enabled wire- less communication: Modeling and optimization, ” arXiv preprint arXiv:2501.02595 , 2025. [97] B. Zheng, T . Ma, C. Y ou, J. T ang, R. Schober , and R. Zhang, “Rotatable antenna enabled wireless communication and sensing: Opportunities and challenges, ” IEEE W ireless Commun. , 2025, early access. [98] L. Zhu, W . Ma, Z. Xiao, and R. Zhang, “Movable antenna en- abled near -field communications: Channel modeling and performance optimization, ” IEEE T rans. Commun. , 2025, early access, DOI: 10.1109/TCOMM.2025.3547783. [99] J. Ding, L. Zhu, Z. Zhou, B. Jiao, and R. Zhang, “Near-field multiuser communications aided by mov able antennas, ” IEEE W ir eless Commun. Lett. , vol. 14, no. 1, pp. 138–142, Jan. 2025. [100] X. Chen, B. Feng, Y . Wu, D. W . K. Ng, and R. Schober, “Joint beamforming and antenna movement design for moveable antenna systems based on st atistical CSI, ” in Pr oc. IEEE Global Commun. Conf. (Globecom) , Kuala Lumpur, Malaysia, Dec. 2023, pp. 4387–4392. [101] Q. Jiang, X. Shao, and R. Zhang, “Statistical channel based low- complexity rotation and position optimization for 6D mov able antennas enabled wireless communication, ” arXiv preprint , 2025. [102] A. F . M. S. Shah, M. Ali Karabulut, E. Cinar, and K. M. Rabie, “ A survey on fluid antenna multiple access for 6G: A new multiple access technology that provides great di versity in a small space, ” IEEE Access , vol. 12, pp. 88 410–88 425, Jun. 2024. [103] W . K. New , K.-K. W ong, H. Xu, C. W ang, F . R. Ghadi, J. Zhang, J. Rao, R. Murch, P . Ram ´ ırez-Espinosa, D. Morales-Jimenez, C.-B. Chae, and K.-F . T ong, “ A tutorial on fluid antenna system for 6G networks: Encompassing communication theory , optimization methods and hardware designs, ” IEEE Commun. Surveys T uts. , v ol. 24, no. 4, pp. 2325–2377, Aug. 2025. [104] J. Zheng, J. Zhang, H. Du, D. Niyato, S. Sun, B. Ai, and K. B. Letaief, “Flexible-position MIMO for wireless communications: Fundamentals, challenges, and future directions, ” IEEE W ir eless Commun. , vol. 31, no. 5, pp. 18–26, Oct. 2024. [105] L. Zhu, W . Ma, W . Mei, Y . Zeng, Q. W u, B. Ning, Z. Xiao, X. Shao, J. Zhang, and R. Zhang, “ A tutorial on mov able antennas for wireless networks, ” IEEE Commun. Surveys T uts. , 2025, early access, DOI: 10.1109/COMST .2025.3546373. [106] X. Shao, W . Mei, C. Y ou, Q. Wu, B. Zheng, C.-X. W ang, J. Li, R. Zhang, R. Schober , L. Zhu, W . Zhuang, and X. Shen, “ A tutorial on six-dimensional movable antenna for 6G networks: Synergizing positionable and rotatable antennas, ” IEEE Commun. Surveys T uts. , 2025, early access, DOI: 10.1109/COMST .2025.3602939. [107] E. Bruce and A. C. Beck, “Experiments with directivity steering for fading reduction, ” Pr oc. IRE , v ol. 23, no. 4, pp. 357–371, Apr . 1935. [108] E. W . Matthews, C. L. Cuccia, and M. D. Rubin, “T echnology consider - ations for the use of multiple beam antenna systems in communications satellites, ” IEEE T rans. Micr ow . Theory T echn. , vol. 27, no. 12, pp. 998–1004, Dec. 1979. [109] P . Clarricoats, Z. Hai, R. Brown, G. Poulton, and G. Crone, “ A reconfigurable mesh reflector antenna, ” in Pr oc. Int. Conf. Antennas Pr opag . (ICAP) . Coventry , UK: IET , Apr . 1989, pp. 1–5. [110] A. D. Monk and P . J. B. Clarricoats, “ Adapti ve null formation with a reconfigurable reflector antenna, ” Pr oc. IEE Micr ow . Antennas Propa g. , vol. 142, no. 3, pp. 220–224, Jun. 1995. [111] D. J. Roscoe, L. Shafai, A. Ittipiboon, M. Cuhaci, and R. Douville, “T unable dipole antennas, ” in Proc. IEEE Antennas Pr opag . Soc. Int. Symp. , Jun. 1993, pp. 672–675. [112] J.-C. Chiao, Y . Fu, D. Choudhury , and L.-Y . Lin, “MEMS millimeter - wav e components, ” in Pr oc. IEEE MTT -S Int. Micr ow . Symp. Dig. , vol. 2, Jun. 1999, pp. 463–466. [113] Y . Kosta and S. Kosta, “Liquid antenna systems, ” in Proc. IEEE Antennas Propa g. Soc. Symp. , vol. 3, Jun. 2004, pp. 2392–2395. [114] J. T . Bernhard, R. W ang, R. Clark, and P . Mayes, “Stacked reconfig- urable antenna elements for space-based radar applications, ” in Proc. 31 IEEE Antennas Propag . Soc. Int. Symp. USNC/URSI Nat. Radio Sci. Meeting , vol. 1. Boston, MA, USA: IEEE, Jul. 2001, pp. 158–161. [115] B. Cetiner , H. Jafarkhani, J.-Y . Qian, H. J. Y oo, A. Grau, and F . De Flaviis, “Multifunctional reconfigurable MEMS integrated an- tennas for adaptive MIMO systems, ” IEEE Commun. Mag. , vol. 42, no. 12, pp. 62–70, Dec. 2004. [116] S. Haykin, “Cognitive radio: Brain-empowered wireless communica- tions, ” IEEE J. Sel. Ar eas Commun. , vol. 23, no. 2, pp. 201–220, Feb. 2005. [117] L. Zhu and K.-K. W ong, “Historical revie w of fluid antenna and mov able antenna, ” arXiv preprint , 2024. [118] G. J. Holzmann and B. Pehrson, The early history of data networks . W ashington, DC, USA: IEEE Computer Society Press, 1995. [119] C. A. Balanis, Antenna theory: Analysis and design . Hobok en, NJ, USA: Wile y , 2016. [120] B. Lewis and J. Evins, “ A ne w technique for reducing radar response to signals entering antenna sidelobes, ” IEEE T rans. Antennas Pr opagat. , vol. 31, no. 6, pp. 993–996, Nov . 1983. [121] T . Ismail and M. Dawoud, “Null steering in phased arrays by con- trolling the element positions, ” IEEE Tr ans. Antennas and Propa gat. , vol. 39, no. 11, pp. 1561–1566, Nov . 1991. [122] N. Chiurtu and B. Rimoldi, “V arying the antenna locations to optimize the capacity of multi-antenna Gaussian channels, ” in Pr oc. IEEE Int. Conf. Acoust., Speech, Signal Pr ocess. (ICASSP) , Istanbul, T urkey , Jun. 2000, pp. 1–3. [123] C. A. Balanis, Modern antenna handbook . Hoboken, New Jersey , USA: John W ile y & Sons, Nov . 2007. [124] D. W . S. T am, “Electrolytic fluid antenna, ” US P atent US7898484B1 , 2008. [125] Y . Kosta and B. Chaturvedi, “ A liquid patch microw av e antenna, ” Pr oc. NA CONECS-1989, Dept. Electr on. Comput. Eng ., Univ . Roorkee, India, T ata McGraw-Hill , pp. 43–47, 1989. [126] S. Zhao, H. Y ang, and H. Y ang, “Single antenna spatial div ersity , ” in Pr oc. IEEE Int. Conf. W ir eless Commun., Netw ., Mobile Comput. (W iCOM) , Beijing, China, Sep. 2009, pp. 1–4. [127] A. Moreira, P . Prats-Iraola, M. Y ounis, G. Krieger , I. Hajnsek, and K. P . Papathanassiou, “ A tutorial on synthetic aperture radar, ” IEEE Geosci. Remote Sens. Mag . , vol. 1, no. 1, pp. 6–43, Mar . 2013. [128] A. Zhuravle v , V . Razevig, S. Ivashov , A. Bugaev , and M. Chizh, “Experimental simulation of multi-static radar with a pair of separated mov able antennas, ” in Pr oc. IEEE International Conf. Microwaves Commun. Antennas Electr on. Syst. (COMCAS) , No v . 2015, pp. 1–5. [129] K. K. W ong, A. Shojaeifard, K.-F . T ong, and Y . Zhang, “Performance limits of fluid antenna systems, ” IEEE Commun. Lett. , vol. 24, no. 11, pp. 2469–2472, No v . 2020. [130] K.-K. W ong, K.-F . T ong, Y . Zhang, and Z. Zhongbin, “Fluid antenna system for 6G: When bruce lee inspires wireless communications, ” Electr on. Lett. , v ol. 56, no. 24, pp. 1288–1290, Nov . 2020. [131] L. Zhu, W . Ma, B. Ning, and R. Zhang, “Mov able-antenna enhanced multiuser communication via antenna position optimization, ” IEEE T r ans. Wir eless Commun. , vol. 23, no. 7, pp. 7214–7229, Jul. 2024. [132] H. O. Y . Suzuki and K. Kawai, “Pinching antenna - using a dielectric wav eguide as an antenna, ” NTT DOCOMO T ec hnical Journal , vol. 23, no. 3, pp. 5–12, Jan. 2022. [133] Z. Ding, R. Schober, and H. V . Poor , “Flexible-antenna systems: A pinching-antenna perspectiv e, ” IEEE T rans. Commun. , 2025, early access, DOI: 10.1109/TCOMM.2025.3555866. [134] Y . Liu, Z. W ang, X. Mu, C. Ouyang, X. Xu, and Z. Ding, “Pinching-antenna systems: Architecture designs, opportunities, and outlook, ” IEEE Commun. Mag. , pp. 1–7, 2025, early access, DOI: 10.1109/MCOM.001.2500037. [135] Z. Y ang, N. W ang, Y . Sun, Z. Ding, R. Schober, G. K. Karagianni- dis, V . W . W ong, and O. A. Dobre, “Pinching antennas: Principles, applications and challenges, ” arXiv pr eprint arXiv:2501.10753 , 2025. [136] Y . Liu, H. Jiang, X. Xu, Z. W ang, J. Guo, C. Ouyang, X. Mu, Z. Ding, A. Nallanathan, G. K. Karagiannidis, and R. Schober , “Pinching- antenna systems (P ASS): A tutorial, ” arXiv preprint , 2025. [137] C. Ouyang, Z. W ang, Y . Liu, and Z. Ding, “ Array gain for pinching- antenna systems (P ASS), ” IEEE Commun. Lett. , vol. 29, no. 6, pp. 1471–1475, Jun. 2025. [138] Z. Xiao, X. Pi, L. Zhu, X.-G. Xia, and R. Zhang, “Multiuser communi- cations with mov able-antenna base station: Joint antenna positioning, receiv e combining, and power control, ” IEEE T r ans. W ir eless Com- mun. , vol. 23, no. 12, pp. 19 744–19 759, Dec. 2024. [139] Y . W u, D. Xu, D. W . K. Ng, W . Gerstacker , and R. Schober, “Movable antenna-enhanced multiuser communication: Optimal discrete antenna positioning and beamforming, ” in Proc. IEEE Global Commun. Conf. (Globecom) , Kuala Lumpur, Malaysia, Dec. 2023, pp. 7508–7513. [140] S. Y ang, W . L yu, B. Ning, Z. Zhang, and C. Y uen, “Flexible precod- ing for multi-user mov able antenna communications, ” IEEE W ir eless Commun. Lett. , v ol. 13, no. 5, pp. 1404–1408, May 2024. [141] G. Hu, Q. W u, G. Li, D. Xu, K. Xu, J. Si, Y . Cai, and N. Al-Dhahir , “T wo-timescale design for movable antenna array-enabled multiuser uplink communications, ” IEEE T rans. V eh. T echnol. , vol. 74, no. 3, pp. 5152–5157, Mar . 2025. [142] Z. Zheng, Q. W u, W . Chen, and G. Hu, “T w o-timescale design for mov able antennas enabled-multiuser MIMO systems, ” IEEE Tr ans. Commun. , 2025, early access, DOI: 10.1109/TCOMM.2025.3585515. [143] L. Zhu, X. Pi, W . Ma, Z. Xiao, and R. Zhang, “Dynamic beam co verage for satellite communications aided by mov able-antenna array , ” IEEE T r ans. Wir eless Commun. , vol. 24, no. 3, pp. 1916–1933, Mar . 2025. [144] L. Lin, J. Ding, Z. Zhou, and B. Jiao, “Power -efficient full-duplex satellite communications aided by mov able antennas, ” IEEE W ir eless Commun. Lett. , v ol. 14, no. 3, pp. 656–660, Mar . 2025. [145] J. W ang, L. Zhu, S. Han, H. Sun, and R. Zhang, “Joint antenna positioning and beamforming for mov able antenna array aided ground station in low-earth orbit satellite communication, ” IEEE Tr ans. W ir e- less Commun. , 2025, early access, DOI: 10.1109/TWC.2025.3642430. [146] Z. Kuang, W . Liu, C. W ang, Z. Jin, J. Ren, X. Zhang, and Y . Shen, “Mov able-antenna array empowered ISA C systems for low-altitude economy , ” in Pr oc. IEEE/CIC Int. Conf. Commun. in China (ICCC) W orkshops , Hangzhou, China, Aug. 2024, pp. 776–781. [147] T . Ren, X. Zhang, L. Zhu, W . Ma, X. Gao, and R. Zhang, “6D movable antenna enhanced interference mitigation for cellular-connected UA V communications, ” IEEE W ir eless Commun. Lett. , vol. 4, no. 6, pp. 1618–1622, Jun. 2025. [148] C. Liu, W . Mei, P . W ang, Y . Meng, B. Ning, and Z. Chen, “U A V- enabled passiv e 6D mov able antennas: Joint deployment and beam- forming optimization, ” arXiv pr eprint arXiv:2412.11150 , 2024. [149] H. W ang, Q. Wu, and W . Chen, “Mov able antenna enabled interfer- ence network: Joint antenna position and beamforming design, ” IEEE W ir eless Commun. Lett. , v ol. 13, no. 9, pp. 2517–2521, Sep. 2024. [150] J. W ang, H. Zhou, Y . Li, Q. Sun, Y . W u, S. Jin, T . Q. S. Quek, and C. Xu, “Wireless channel models for maritime communications, ” IEEE Access , vol. 6, pp. 68 070–68 088, No v . 2018. [151] F . S. Alqurashi, A. T richili, N. Saeed, B. S. Ooi, and M.-S. Alouini, “Maritime communications: A survey on enabling technologies, oppor- tunities, and challenges, ” IEEE Internet Things J. , v ol. 10, no. 4, pp. 3525–3547, Feb. 2023. [152] W . Ma, L. Zhu, and R. Zhang, “Mov able antenna enhanced wireless sensing via antenna position optimization, ” IEEE T rans. W ir eless Commun. , vol. 23, no. 11, pp. 16 575–16 589, Nov . 2024. [153] Y . Chen, Z. Ren, X. Y u, L. Liu, and J. Xu, “Exploiting moving arrays for near-field sensing, ” IEEE W ir eless Commun. Lett. , vol. 14, no. 3, pp. 601–605, Mar . 2024. [154] X. Shao, R. Zhang, and R. Schober, “Exploiting six-dimensional mov able antenna for wireless sensing, ” IEEE W ir eless Commun. Lett. , vol. 14, no. 2, pp. 265–269, Feb . 2025. [155] W . Ma, L. Zhu, and R. Zhang, “Movable antenna enhanced integrated sensing and communication via antenna position optimization, ” arXiv pr eprint arXiv:2501.07318 , 2025. [156] Z. Li, J. Ba, Z. Su, J. Huang, H. Peng, W . Chen, L. Du, and T . H. Luan, “Mov able antennas enabled ISA C systems: Fundamentals, opportunities, and future directions, ” IEEE W ir eless Commun. , 2025, early access, DOI: 10.1109/MWC.002.2400522. [157] H. Wu, H. Ren, and C. Pan, “Movable antenna-enabled RIS-aided integrated sensing and communication, ” IEEE Tr ans. Cogn. Commun. Netw . , 2025, early access, DOI: 10.1109/TCCN.2025.3559578. [158] W . L yu, S. Y ang, Y . Xiu, Z. Zhang, C. Assi, and C. Y uen, “Mov able antenna enabled integrated sensing and communication, ” IEEE T rans. W ir eless Commun. , vol. 24, no. 4, pp. 2862–2875, Apr . 2025. [159] S. Peng, C. Zhang, Y . Xu, X. Ou, and D. He, “Joint antenna position and beamforming optimization with self-interference mitigation in MA- ISA C system, ” in Proc. IEEE W ir eless Commun. Networking Conf. (WCNC) , Milan, Italy , Mar . 2025, pp. 1–6. [160] C. W ang, G. Li, H. Zhang, K.-K. W ong, Z. Li, D. W . K. Ng, and C.-B. Chae, “Fluid antenna system liberating multiuser MIMO for ISAC via deep reinforcement learning, ” IEEE Tr ans. W ir eless Commun. , vol. 23, no. 9, pp. 10 879–10 894, Sep. 2024. 32 [161] Y . Guo, W . Chen, Q. W u, Y . Liu, Q. W u, K. W ang, J. Li, and L. Xu, “Mov able antenna enhanced networked full-duple x integrated sensing and communication system, ” arXiv pr eprint arXiv:2411.09426 , 2024. [162] Y . Ma, K. Liu, Y . Liu, L. Zhu, and Z. Xiao, “Mo vable-antenna aided secure transmission for RIS-ISAC systems, ” IEEE T rans. Wir eless Commun. , 2025, early access, DOI: 10.1109/TWC.2025.3577040. [163] L. Zhou, J. Y ao, M. Jin, T . Wu, and K.-K. W ong, “Fluid antenna- assisted ISA C systems, ” IEEE Wir eless Commun. Lett. , vol. 13, no. 12, pp. 3533–3537, Dec. 2024. [164] Y . Zhang, Z. Han, S. T ang, S. Shen, C.-Y . Chiu, and R. D. Murch, “ A highly pattern-reconfigurable planar antenna with 360 ◦ single- and multi-beam steering, ” IEEE T rans. Antennas Propa g. , vol. 70, no. 8, pp. 6490–6504, Aug. 2022. [165] L. Song, W . Gao, and Y . Rahmat-Samii, “3-D printed microfluidics channelizing liquid metal for multipolarization reconfigurable extended E-shaped patch antenna, ” IEEE Tr ans. Antennas Propa g. , vol. 68, no. 10, pp. 6867–6878, Oct. 2020. [166] S. V enkatesh, D. Sturm, X. Lu, R. J. Lang, and K. Sengupta, “Origami microw av e imaging array: Metasurface tiles on a shape-morphing surface for reconfigurable computational imaging, ” Advanced Science , vol. 9, no. 28, p. 2105016, Jul. 2022. [167] L. Y . Liu, D. N. Lin, A. K. Poddar, U. L. Rohde, and M. S. T ong, “ A four-port reconfigurable antenna sensor of sensing multiple parameters for smart agricultural monitoring, ” IEEE Sens. J. , vol. 25, no. 4, pp. 7107–7120, Feb. 2025. [168] A. Raza, R. K eshav arz, and N. Shariati, “Precision agriculture: Ultra- compact sensor and reconfigurable antenna for joint sensing and communication, ” IEEE T r ans. Instrum. Meas. , vol. 73, pp. 1–13, Jan. 2024. [169] J. T . Bernhard, Reconfigurable antennas . Morgan & Claypool Publishers, 2007. [170] Z. Li, E. Ahmed, A. M. Eltawil, and B. A. Cetiner, “ A beam-steering reconfigurable antenna for WLAN applications, ” IEEE T rans. Antennas Pr opag , vol. 63, no. 1, pp. 24–32, Jan. 2015. [171] F . Jiang, S. Shen, C.-Y . Chiu, Z. Zhang, Y . Zhang, Q. S. Cheng, and R. Murch, “Pixel antenna optimization based on perturbation sensitivity analysis, ” IEEE Tr ans. Antennas and Pr opagat. , v ol. 70, no. 1, pp. 472– 486, Jan. 2022. [172] M. Hasan, I. Bahceci, and B. A. Cetiner , “Downlink multi-user MIMO transmission for radiation pattern reconfigurable antenna systems, ” IEEE T rans. W ireless Commun. , vol. 17, no. 10, pp. 6448–6463, Oct. 2018. [173] P . Lotfi, S. Soltani, and R. D. Murch, “Printed endfire beam-steerable pixel antenna, ” IEEE T r ans. Antennas Pr opag. , vol. 65, no. 8, pp. 3913– 3923, Aug. 2017. [174] K. Chen, C. Qi, Y . Hong, and C. Y uen, “REMAA: Reconfigurable pixel antenna-based electronic movable-antenna arrays for multiuser communications, ” IEEE Tr ans. Commun. , 2025, early access, DOI: 10.1109/TCOMM.2025.3592593. [175] Z. Han, S. Shen, Y . Zhang, C.-Y . Chiu, and R. Murch, “ A pattern correlation decomposition method for analysis of ESP AR in single-RF MIMO systems, ” IEEE T rans. W ir eless Commun. , vol. 21, no. 7, pp. 4654–4668, Jul. 2022. [176] H.-T . Liu, S. Gao, and T .-H. Loh, “Electrically small and lo w cost smart antenna for wireless communication, ” IEEE T rans. Antennas Pr opag . , vol. 60, no. 3, pp. 1540–1549, Mar . 2012. [177] C. Zhang, S. Shen, Z. Han, and R. D. Murch, “ Analog beamforming using ESP AR for single-RF precoding systems, ” IEEE Tr ans. Wir eless Commun. , vol. 22, no. 7, pp. 4387–4400, Jul. 2023. [178] C. Sun, A. Hirata, T . Ohira, and N. Karmakar, “Fast beamforming of electronically steerable parasitic array radiator antennas: theory and experiment, ” IEEE T rans. Antennas Propa g. , vol. 52, no. 7, pp. 1819– 1832, Jul. 2004. [179] L. Zhang, Q. W u, and T . A. Denidni, “Electronically radiation pattern steerable antennas using activ e frequency selectiv e surfaces, ” IEEE T r ans. Antennas Pr opag . , vol. 61, no. 12, pp. 6000–6007, Dec. 2013. [180] Y . Zhang, S. T ang, Z. Han, J. Rao, S. Shen, M. Li, C.-Y . Chiu, and R. Murch, “ A lo w-profile microstrip vertically polarized endfire antenna with 360 ◦ beam-scanning and high beam-shaping capability , ” IEEE T r ans. Antennas Pr opag . , vol. 70, no. 9, pp. 7691–7702, Sep. 2022. [181] M. Niroo-Jazi and T . A. Denidni, “Electronically sweeping-beam antenna using a new cylindrical frequency-selectiv e surface, ” IEEE T r ans. Antennas Pr opag . , vol. 61, no. 2, pp. 666–676, Feb . 2013. [182] C. Gu, S. Gao, B. Sanz-Izquierdo, E. A. Parker , F . Qin, H. Xu, J. C. Batchelor, X. Y ang, and Z. Cheng, “3-D coverage beam-scanning antenna using feed array and activ e frequency-selectiv e surface, ” IEEE T r ans. Antennas Pr opag . , vol. 65, no. 11, pp. 5862–5870, Nov . 2017. [183] Y . Jia, G. Jiang, Y . Liu, and Y . Zhong, “Beam scanning for dual- polarized antenna with active reflection metasurface, ” IEEE Antennas W ir eless Pr opag. Lett. , vol. 21, no. 9, pp. 1722–1726, Sep. 2022. [184] A. C. K. Mak, C. R. Ro well, and R. D. Murch, “Low cost re- configurable landstorfer planar antenna array , ” IEEE T r ans. Antennas Pr opag . , vol. 57, no. 10, pp. 3051–3061, Oct. 2009. [185] G. Jin, M. Li, D. Liu, and G. Zeng, “ A simple planar pattern- reconfigurable antenna based on arc dipoles, ” IEEE Antennas W ir eless Pr opag . Lett. , v ol. 17, no. 9, pp. 1664–1668, Sep. 2018. [186] Y .-F . Cheng, X. Ding, B.-Z. W ang, and W . Shao, “ An azimuth-pattern- reconfigurable antenna with enhanced gain and front-to-back ratio, ” IEEE Antennas W ir eless Propa g. Lett. , vol. 16, pp. 2303–2306, Jun. 2017. [187] J. Ouyang, Y . M. Pan, and S. Y . Zheng, “Center-fed unilateral and pattern reconfigurable planar antennas with slotted ground plane, ” IEEE T r ans. Antennas Pr opag . , vol. 66, no. 10, pp. 5139–5149, Oct. 2018. [188] Q. H. Dang, S. J. Chen, D. C. Ranasinghe, and C. Fumeaux, “ A frequency-reconfigurable wearable textile antenna with one-octav e tun- ing range, ” IEEE T rans. Antennas Pr opa g. , vol. 69, no. 12, pp. 8080– 8089, Dec. 2021. [189] Q. H. Dang, S. J. Chen, C. Fumeaux, and N. Nguyen-Trong, “Dual- band reconfigurable flexible antenna with extensi ve frequency tuning range, ” IEEE Antennas W ir eless Propa g. Lett. , vol. 23, no. 11, pp. 3769–3773, Nov . 2024. [190] P . Guo, W . Zhong, S.-L. Chen, D. Chen, and Y . Liu, “ A novel programmable stacked patch antenna with the div ersity of sixteen linear polarizations and four frequenc y bands, ” IEEE T rans. Antennas Pr opag . , vol. 71, no. 1, pp. 1035–1040, Jan. 2023. [191] C. Gu, S. Gao, H. Liu, Q. Luo, T .-H. Loh, M. Sobhy , J. Li, G. W ei, J. Xu, F . Qin, B. Sanz-Izquierdo, and R. A. Abd-Alhameed, “Compact smart antenna with electronic beam-switching and reconfigurable po- larizations, ” IEEE Tr ans. Antennas Pr opag . , vol. 63, no. 12, pp. 5325– 5333, Dec. 2015. [192] J. Ren, Z. Zhou, Z. H. W ei, H. M. Ren, Z. Chen, Y . Liu, and Y . Z. Y in, “Radiation pattern and polarization reconfigurable antenna using dielectric liquid, ” IEEE Tr ans. Antennas Propa g. , vol. 68, no. 12, pp. 8174–8179, Dec. 2020. [193] S. Nikolaou, R. Bairavasubramanian, C. Lugo, I. Carrasquillo, D. Thompson, G. Ponchak, J. Papapolymerou, and M. T entzeris, “Pattern and frequency reconfigurable annular slot antenna using PIN diodes, ” IEEE Tr ans. Antennas Pr opag . , vol. 54, no. 2, pp. 439–448, Feb . 2006. [194] H. A. Majid, M. K. A. Rahim, M. R. Hamid, and M. F . Ismail, “Frequency and pattern reconfigurable slot antenna, ” IEEE T rans. Antennas Propa g. , vol. 62, no. 10, pp. 5339–5343, Oct. 2014. [195] H. L. Zhu, X. H. Liu, S. W . Cheung, and T . I. Y uk, “Frequency- reconfigurable antenna using metasurface, ” IEEE Tr ans. Antennas Pr opag . , vol. 62, no. 1, pp. 80–85, Jan. 2014. [196] D. Rodrigo, B. A. Cetiner, and L. Jofre, “Frequenc y , radiation pattern and polarization reconfigurable antenna using a parasitic pixel layer, ” IEEE T rans. Antennas Pr opag. , vol. 62, no. 6, pp. 3422–3427, Jun. 2014. [197] G. A. Ram ´ ırez, I. Zhou, S. Blanch, M. A. T o wfiq, B. A. Cetiner, J. Romeu, and L. Jofre-Roca, “Reconfigurable dual-polarized beam- steering broadband antenna using a crossed-strips geometry , ” IEEE Antennas W ir eless Propag . Lett. , v ol. 20, pp. 1379–1383, Aug. 2021. [198] S. T ang, C.-Y . Chiu, and R. Murch, “In v estigation of a reconfigurable pixel antenna for millimeter wav e bands, ” in Pr oc. IEEE Int. Symp. Antennas Pr opag. North Am. Radio Sci. Meeting , Montreal, QC, Canada, Jul. 2020, pp. 295–296. [199] Q. H. Dang, N. Nguyen-T rong, C. Fumeaux, and S. J. Chen, “Tuning- range e xtension strategies for varactor-based frequency-reconfigurable antennas, ” IEEE Open J. Antennas Propag . , vol. 4, pp. 1087–1094, Nov . 2023. [200] L. Pringle, P . Harms, S. Blalock, G. Kiesel, E. Kuster , P . Friederich, R. Prado, J. Morris, and G. Smith, “ A reconfigurable aperture antenna based on switched links between electrically small metallic patches, ” IEEE T rans. Antennas Pr opag. , vol. 52, no. 6, pp. 1434–1445, Jun. 2004. [201] X. Y ang, Y . Liu, H. Lei, Y . Jia, P . Zhu, and Z. Zhou, “ A radiation pattern reconfigurable Fabry–P ´ erot antenna based on liquid metal, ” IEEE T rans. Antennas Pr opa g. , v ol. 68, no. 11, pp. 7658–7663, Nov . 2020. [202] G. B. Zhang, R. C. Gough, M. R. Moorefield, K. J. Cho, A. T . Ohta, and W . A. Shiroma, “ A liquid-metal polarization-pattern-reconfigurable dipole antenna, ” IEEE Antennas W ir eless Pr opag . Lett. , vol. 17, no. 1, pp. 50–53, Jan. 2018. 33 [203] D. Rodrigo, L. Jofre, and B. A. Cetiner, “Circular beam-steering recon- figurable antenna with liquid metal parasitics, ” IEEE T rans. Antennas Pr opag . , vol. 60, no. 4, pp. 1796–1802, Apr . 2012. [204] Y .-W . Wu, T . Cole, K. Jiang, Y . Huang, and Y . W ang, “Dual-band omnidirectional scanning array using liquid metal-enabled reflection- type phase shifters, ” IEEE T rans. Antennas Propa g. , pp. 1–1, May 2024. [205] S. Bildik, S. Dieter, C. Fritzsch, W . Menzel, and R. Jakoby , “Re- configurable folded reflectarray antenna based upon liquid crystal technology , ” IEEE T r ans. Antennas Pr opag . , vol. 63, no. 1, pp. 122– 132, Jan. 2015. [206] X. Y . Li, D. Jiang, J. Liu, and M. S. T ong, “ A Ka-band multilayer beaming-scanning antenna using liquid crystals, ” IEEE Antennas W ir e- less Propa g. Lett. , v ol. 21, no. 1, pp. 44–48, Jan. 2022. [207] A. C. Polycarpou, M. A. Christou, and N. C. P apanicolaou, “Tunable patch antenna printed on a biased nematic liquid crystal cell, ” IEEE T r ans. Antennas Pr opag . , vol. 62, no. 10, pp. 4980–4987, Oct. 2014. [208] G. Perez-Palomino, M. Barba, J. A. Encinar , R. Cahill, R. Dickie, P . Baine, and M. Bain, “Design and demonstration of an electronically scanned reflectarray antenna at 100 GHz using multiresonant cells based on liquid crystals, ” IEEE T rans. Antennas Pr opa g. , vol. 63, no. 8, pp. 3722–3727, Aug. 2015. [209] C.-Y . Chiu, J. Li, S. Song, and R. D. Murch, “Frequency-reconfigurable pixel slot antenna, ” IEEE T rans. Antennas Propa g. , vol. 60, no. 10, pp. 4921–4924, Oct. 2012. [210] G. Huff and J. Bernhard, “Integration of packaged RF MEMS switches with radiation pattern reconfigurable square spiral microstrip antennas, ” IEEE T r ans. Antennas Pr opag. , vol. 54, no. 2, pp. 464–469, Feb. 2006. [211] D. Anagnostou, G. Zheng, M. Chryssomallis, J. L yke, G. Ponchak, J. Papapolymerou, and C. Christodoulou, “Design, fabrication, and measurements of an RF-MEMS-based self-similar reconfigurable an- tenna, ” IEEE T rans. Antennas Propag . , vol. 54, no. 2, pp. 422–432, Feb . 2006. [212] J. Eichenberger and N. Ghalichechian, “Mechanically reconfigurable slot array using accordion-like microactuators, ” IEEE Antennas W ir e- less Propa g. Lett. , v ol. 20, no. 10, pp. 2048–2052, Aug. 2021. [213] G. W ashington, H.-S. Y oon, M. Angelino, and W . Theunissen, “Design, modeling, and optimization of mechanically reconfigurable aperture antennas, ” IEEE T rans. Antennas Pr opag. , vol. 50, no. 5, pp. 628–637, May 2002. [214] M. Hwang, G. Kim, S. Kim, and N. S. Jeong, “Origami-inspired radiation pattern and shape reconfigurable dipole array antenna at C- band for cubesat applications, ” IEEE Tr ansactions on Antennas and Pr opagation , vol. 69, no. 5, pp. 2697–2705, May 2021. [215] J. L. V aldes, L. Huitema, E. Arnaud, D. Passerieux, and A. Crunteanu, “ A polarization reconfigurable patch antenna in the millimeter-wa ves domain using optical control of phase change materials, ” IEEE Open J. Antennas Propa g. , vol. 1, pp. 224–232, May 2020. [216] Y . Y ang, Z. Y in, X. Zhu, H. A. Jamal, X. Lv , K. Hu, M. Joshi, N. W ille, M. Li, B. Zhang, Z. Luo, S. Magdassi, and M. T entzeris, “ A review of multimaterial additively manufactured electronics and 4-D printing/origami shape-memory de vices: Design, fabrication, and implementation, ” Proc. IEEE , vol. 112, no. 8, pp. 954–999, Aug. 2024. [217] S. T ang, Y . Zhang, Z. Han, C.-Y . Chiu, and R. Murch, “ A pattern- reconfigurable antenna for single-RF 5G millimeter-wav e communica- tions, ” IEEE Antennas W ir eless Pr opag . Lett. , vol. 20, no. 12, Dec. 2021. [218] S. V enkatesh, X. Lu, H. Saeidi, and K. Sengupta, “ A high-speed programmable and scalable terahertz holographic metasurface based on tiled CMOS chips, ” Nat. electron. , vol. 3, no. 12, pp. 785–793, Dec. 2020. [219] J. Rao, Y . Zhang, and R. Murch, “ A reconfigurable intelligent surface for arbitrary mm-W a ve polarization using parasitic enhancing struc- tures, ” in Proc. IEEE Int. Symp. Antennas Pr opag. USNC-URSI Radio Sci. Meeting (USNC-URSI) , Portland, OR, USA, Sep. 2023, pp. 217– 218. [220] Y . Li, Y . Zhang, Z. Han, S. T ang, L. Jing, C.-Y . Chiu, and R. Murch, “ Analog precoding using highly reconfigurable antennas, ” IEEE W ir e- less Commun. Lett. , vol. 9, no. 5, pp. 648–652, May 2020. [221] H. W ang, A. Li, Y .-F . Liu, Q. Qin, L. Song, and Y . Li, “Reconfig- urable MIMO towards electro-magnetic information theory: Capacity maximization pattern design, ” in Proc. IEEE V eh. T echnol. Conf. (VTC- Spring) , Helsinki, Finland, Jun. 2022, pp. 1–7. [222] Y . Zhang, S. Shen, Z. Han, C.-Y . Chiu, and R. Murch, “Compact MIMO systems utilizing a pixelated surface: Capacity maximization, ” IEEE T r ans. V eh. T echnol. , v ol. 70, no. 9, pp. 8453–8467, Sep. 2021. [223] M. R. Castellanos, S. Y ang, C.-B. Chae, and R. W . Heath Jr, “Em- bracing reconfigurable antennas in the tri-hybrid MIMO architecture for 6G, ” arXiv pr eprint arXiv:2501.16610 , 2025. [224] Y . Gao, H. V inck, and T . Kaiser, “Massi ve MIMO antenna selection: Switching architectures, capacity bounds, and optimal antenna selection algorithms, ” IEEE T rans. Signal Pr ocess. , vol. 66, no. 5, pp. 1346– 1360, Mar . 2018. [225] H. Li, L. Song, and M. Debbah, “Energy efficiency of large-scale multiple antenna systems with transmit antenna selection, ” IEEE T rans. Commun. , vol. 62, no. 2, pp. 638–647, Feb. 2014. [226] B. Fuchs, “ Antenna selection for array synthesis problems, ” IEEE Antennas W ir eless Propag . Lett. , v ol. 16, pp. 868–871, Sep. 2017. [227] V . V enkateswaran and A.-J. van der V een, “ Analog beamforming in MIMO communications with phase shift networks and online channel estimation, ” IEEE Tr ans. Signal Process. , vol. 58, no. 8, pp. 4131– 4143, Aug. 2010. [228] B. Y ang, Z. Y u, J. Lan, R. Zhang, J. Zhou, and W . Hong, “Digital beamforming-based massi ve MIMO transceiv er for 5G millimeter-w ave communications, ” IEEE T rans. Micr ow . Theory T echn. , vol. 66, no. 7, pp. 3403–3418, Jul. 2018. [229] S. Dutta, C. N. Barati, D. Ramirez, A. Dhananjay , J. F . Buckwalter , and S. Rangan, “ A case for digital beamforming at mmW a ve, ” IEEE T r ans. Wir eless Commun. , vol. 19, no. 2, pp. 756–770, Feb . 2020. [230] F . Sohrabi and W . Y u, “Hybrid digital and analog beamforming design for large-scale antenna arrays, ” IEEE J. Sel. T opics Signal Pr ocess. , vol. 10, no. 3, pp. 501–513, Apr . 2016. [231] T . Lin, J. Cong, Y . Zhu, J. Zhang, and K. Ben Letaief, “Hybrid beamforming for millimeter wav e systems using the MMSE criterion, ” IEEE T rans. Commun. , v ol. 67, no. 5, pp. 3693–3708, May 2019. [232] M. Ahmed, A. W ahid, S. S. Laique, W . U. Khan, A. Ihsan, F . Xu, S. Chatzinotas, and Z. Han, “ A survey on ST AR-RIS: Use cases, recent advances, and future research challenges, ” IEEE Internet Things J. , vol. 10, no. 16, pp. 14 689–14 711, Aug. 2023. [233] X. Shao, L. Cheng, X. Chen, C. Huang, and D. W . K. Ng, “Re- configurable intelligent surface-aided 6G massive access: Coupled tensor modeling and sparse bayesian learning, ” IEEE Tr ans. W ir eless Commun. , vol. 21, no. 12, pp. 10 145–10 161, Dec. 2022. [234] B. Zheng and R. Zhang, “Intelligent reflecting surface-enhanced OFDM: Channel estimation and reflection optimization, ” IEEE W ir eless Commun. Lett. , v ol. 9, no. 4, pp. 518–522, Apr . 2020. [235] B. Zheng and C. Y ou and R. Zhang, “Double-IRS assisted multi- user MIMO: Cooperativ e passive beamforming design, ” IEEE T r ans. W ir eless Commun. , vol. 20, no. 7, pp. 4513–4526, Jul. 2021. [236] N. Shlezinger , G. C. Alexandropoulos, M. F . Imani, Y . C. Eldar , and D. R. Smith, “Dynamic metasurface antennas for 6G extreme massi ve MIMO communications, ” IEEE Wir eless Commun. , vol. 28, no. 2, pp. 106–113, Apr . 2021. [237] M. Boyarsky , T . Sleasman, M. F . Imani, J. N. Gollub, and D. R. Smith, “Electronically steered metasurface antenna, ” Scientific reports , v ol. 11, no. 1, p. 4693, Feb. 2021. [238] R. Zhang, G. Chen, L. Cheng, X. Guan, Q. W u, W . W u, and R. Zhang, “T ensor-based channel estimation for extremely large-scale MIMO- OFDM with dynamic metasurface antennas, ” IEEE T rans. W ir eless Commun. , vol. 24, no. 7, pp. 6052–6068, Jul. 2025. [239] H. W ang, N. Shlezinger, Y . C. Eldar, S. Jin, M. F . Imani, I. Y oo, and D. R. Smith, “Dynamic metasurface antennas for MIMO-OFDM receiv ers with bit-limited ADCs, ” IEEE T rans. Commun. , v ol. 69, no. 4, pp. 2643–2659, Apr . 2021. [240] R. J. W illiams, P . Ram ´ ırez-Espinosa, J. Y uan, and E. de Carvalho, “Electromagnetic based communication model for dynamic metasur- face antennas, ” IEEE T r ans. W ir eless Commun. , vol. 21, no. 10, pp. 8616–8630, Oct. 2022. [241] T . Gong, P . Gavriilidis, R. Ji, C. Huang, G. C. Alexandropoulos, L. W ei, Z. Zhang, M. Debbah, H. V . Poor , and C. Y uen, “Holographic MIMO communications: Theoretical foundations, enabling technologies, and future directions, ” IEEE Commun. Surveys T uts. , vol. 26, no. 1, pp. 196–257, 4th Quart. 2023. [242] M. Chafii, L. Bariah, S. Muhaidat, and M. Debbah, “T welve scientific challenges for 6G: Rethinking the foundations of communications theory , ” IEEE Commun. Surveys Tuts. , vol. 25, no. 2, pp. 868–904, 2nd Quart. 2023. [243] J. Ding, Z. Zhou, X. Shao, B. Jiao, and R. Zhang, “Mo vable antenna- aided near-field integrated sensing and communication, ” arXiv preprint arXiv:2412.19470 , 2024. [244] Q. W u, B. Zheng, T . Ma, and R. Zhang, “Modeling and optimization for rotatable antenna enabled wireless communication, ” in Pr oc. IEEE Int. Conf. Commun. (ICC) , Montreal, QC, Canada, Jun. 2025, pp. 1–6. 34 [245] X. Shao, R. Zhang, Q. Jiang, J. P ark, T . Q. S. Quek, and R. Schober , “Distributed channel estimation and optimization for 6D mov able antenna: Unveiling directional sparsity , ” IEEE J. Select. T opics Signal Pr ocessing , vol. 19, no. 2, pp. 349–365, Mar . 2025. [246] X. Shao, L. Hu, Y . Sun, X. Li, Y . Zhang, J. Ding, X. Shi, F . Chen, D. W . K. Ng, and R. Schober, “Hybrid near-far field 6D movable antenna design exploiting directional sparsity and deep learning, ” IEEE T r ans. Wir eless Commun. , 2025, accepted. [247] X. Shao, R. Zhang, H. Zhou, Q. Jiang, C. Zhou, W . Zhuang, and X. Shen, “Polarforming antenna enhanced sensing and communication: Modeling and optimization, ” arXiv pr eprint arXiv:2505.08070 , 2025. [248] X. Shao, Q. Jiang, D. W . K. Ng, and N. Al-Dhahir, “Polarized 6D mov able antenna for wireless communication: Channel modeling and optimization, ” arXiv preprint , 2025. [249] H. W ang, X. Shao, B. Zheng, X. Shi, and R. Zhang, “Passi ve six- dimensional movable antenna (6DMA)-assisted multiuser communica- tion, ” IEEE W ir eless Commun. Lett. , vol. 14, no. 4, pp. 1014–1018, Apr . 2025. [250] X. Shi, X. Shao, B. Zheng, and R. Zhang, “6DMA-aided cell-free massiv e MIMO communication, ” vol. 14, no. 5, pp. 1361–1365, May 2025. [251] N. Cheng, S. Y ang, R. Sun, Z. Y in, X. Shao, W . Zhuang, and X. Shen, “Channel knowledge map-enabled 6D mo vable antenna systems with kinematic constraints: A manifold optimization approach, ” IEEE T rans. W ir eless Commun. , 2025, early access. [252] W . W ang, Y . Huang, X. Shao, and C. Zhang, “ Aerial 6D mov able antenna-enabled cell-free networks, ” IEEE T rans. V eh. T echnol. , pp. 1–5, 2025, early access, DOI: 10.1109/TVT .2025.3614719. [253] X. Xiong, B. Zheng, W . Wu, W . Zhu, M. W en, S. Lin, and Y . Zeng, “Intelligent rotatable antenna for integrated sensing, communica- tion, and computation: Challenges and opportunities, ” arXiv preprint arXiv:2506.13586 , 2025. [254] C. Zhou, C. Y ou, B. Zheng, X. Shao, and R. Zhang, “Rotatable antennas for integrated sensing and communications, ” IEEE W ir eless Commun. Lett. , vol. 14, no. 9, pp. 2838–2842, Sep. 2025. [255] Y . Xie, W . Mei, D. W ang, B. Ning, Z. Chen, J. Fang, and W . Guo, “THz beam squint mitigation via 3D rotatable antennas, ” in Proc. IEEE Int. Conf. Commun. (ICC) , Montreal, QC, Canada, Jun. 2025, pp. 1–6. [256] L. Dai, B. Zheng, Y . T an, L. Zhu, F . Chen, and R. Zhang, “Rotatable an- tenna enabled wireless communication system with visual recognition: A prototype implementation, ” in Pr oc. IEEE/CIC Int. Conf. Commun. in China (ICCC) , Shanghai, China, Aug. 2025, pp. 1–6. [257] L. Dai, B. Zheng, and Q. W u, “Rotatable antenna-enabled secure wireless communication, ” IEEE W ir eless Commun. Lett. , 2025, early access, DOI: 10.1109/L WC.2025.3593258. [258] Q. Dai, B. Zheng, Q. W ang, X. Xiong, X. Shao, L. Zhu, and R. Zhang, “ A demo of radar sensing aided rotatable antenna for wireless commu- nication system, ” in Pr oc. IEEE Int. Conf . Electron. Circuits Inf. Eng. (ECIE) , Guangzhou, China, May 2025, pp. 1–4. [259] P . W ang, Y . Xue, W . Mei, J. Fang, and R. Zhang, “U A V-enabled passi ve 6DMA for isac: Joint location, orientation, and reflection optimization, ” arXiv preprint arXiv:2505.10220 , 2025. [260] B. Ning, S. Y ang, Y . W u, P . W ang, W . Mei, C. Y uen, and E. Bj ¨ ornson, “Mov able antenna-enhanced wireless communications: General ar- chitectures and implementation methods, ” IEEE W ir eless Commun. , vol. 32, no. 5, pp. 108–116, Oct. 2025. [261] L. Marnat, A. A. Carreno, D. Conchouso, M. G. Martı, I. G. Foulds, and A. Shamim, “New movable plate for efficient millimeter wa ve vertical on-chip antenna, ” IEEE T rans. Antennas and Pr opagat. , vol. 61, no. 4, pp. 1608–1615, Apr . 2013. [262] A. M. Morishita, C. K. Y . Kitamura, A. T . Ohta, and W . A. Shiroma, “ A liquid-metal monopole array with tunable frequency , gain, and beam steering, ” IEEE Antennas W ir eless Pr opag . Lett. , vol. 12, pp. 1388– 1391, Oct. 2013. [263] Y . Shen, K.-F . T ong, and K.-K. W ong, “Reconfigurable surface wa ve fluid antenna for spatial MIMO applications, ” in Pr oc. IEEE-APS T op. Conf. Antennas Propa g. W ir eless Commun. (APWC) , Honolulu, HI, USA, Aug. 2021, pp. 150–152. [264] H. W ang, Y . Shen, K.-F . T ong, and K.-K. W ong, “Continuous elec- trowetting surface-wa ve fluid antenna for mobile communications, ” in Pr oc. IEEE Reg . 10 Conf. (TENCON) , Hong K ong, China, Oct. 2022, pp. 1–3. [265] T . W u, K. Zhi, J. Y ao, X. Lai, J. Zheng, H. Niu, M. Elkashlan, K.- K. W ong, C.-B. Chae, Z. Ding, G. K. Karagiannidis, M. Debbah, and C. Y uen, “Fluid antenna systems enabling 6G: Principles, applications, and research directions, ” IEEE W ireless Commun. , 2026, early access, DOI: 10.1109/MWC.2025.3629597. [266] Y . Zhang, Y . Zhang, L. Zhu, S. Xiao, W . T ang, Y . C. Eldar , and R. Zhang, “Mov able antenna-aided hybrid beamforming for multi-user communications, ” IEEE T rans. V eh. T ec hnol. , vol. 74, no. 6, pp. 9899– 9903, Jun. 2025. [267] S. Basbug, “Design and synthesis of antenna array with movable elements along semicircular paths, ” IEEE Antennas W ir eless Propa gat. Lett. , vol. 16, pp. 3059–3062, Oct. 2017. [268] A. Bab uscia, B. Corbin, M. Knapp, R. Jensen-Clem, M. V an de Loo, and S. Seager , “Inflatable antenna for cubesats: Motiv ation for dev elopment and antenna design, ” Acta Astronautica , vol. 91, pp. 322– 332, Jun. 2013. [269] N. Chahat, R. E. Hodges, J. Sauder, M. Thomson, and Y . Rahmat- Samii, “The deep-space network telecommunication cubesat antenna: Using the deployable Ka-band mesh reflector antenna, ” IEEE Antennas Pr opagat. Mag. , vol. 59, no. 2, pp. 31–38, Apr . 2017. [270] M. Fu, L. Zhu, and R. Zhang, “Extremely large-scale movable antenna- enabled multiuser communications: Modeling and optimization, ” arXiv pr eprint arXiv:2506.02735 , 2025. [271] S. K. Sharma and J.-C. S. Chieh, Eds., Multifunctional Antennas and Arrays for W ir eless Communication Systems . Wiley-IEEE Press, 2021. [272] X. Li, C. Hu, S. Cai, K. Liu, L. Shen, H. Xu, and Q. Li, “Cell throughput analysis for do wnlink multi-user MIMO transmission with radiation pattern reconfigurable antennas, ” in Proc. IEEE V eh. T echnol. Conf. (VTC-Spring) , Florence, Italy , Jun. 2023, pp. 1–7. [273] F . Armandoust, E. T ohidi, M. Kasparick, L. W ang, A. H. Gokceoglu, and S. Stanczak, “MIMO systems with reconfigurable antennas: Joint channel estimation and mode selection, ” in Pr oc. WSA & SCC , Feb . 2023, pp. 1–6. [274] K. Y ing, Z. Gao, S. Chen, X. Gao, M. Matthaiou, R. Zhang, and R. Schober, “Reconfigurable massiv e MIMO: Harnessing the power of the electromagnetic domain for enhanced information transfer , ” IEEE W ir eless Commun. , vol. 31, no. 3, pp. 125–132, Jun. 2024. [275] X. Y uan, Z. Li, D. Rodrigo, H. S. Mopidevi, O. Kaynar , L. Jofre, and B. A. Cetiner, “A parasitic layer-based reconfigurable antenna de- sign by multi-objecti ve optimization, ” IEEE T rans. Antennas Pr opag. , vol. 60, no. 6, pp. 2690–2701, Jun. 2012. [276] I. A. Hemadeh, P . Xiao, Y . Kabiri, L. Xiao, V . Fusco, and R. T afazolli, “Polarization modulation design for reduced RF chain wireless, ” IEEE T r ans. Commun. , v ol. 68, no. 6, pp. 3890–3907, Jun. 2020. [277] H. W ang, A. Li, Y .-F . Liu, Q. Qin, L. Song, and Y . Li, “ Achie vable rate maximization pattern design for reconfigurable MIMO antenna array , ” IEEE T rans. W ir eless Commun. , vol. 22, no. 9, pp. 5884–5897, Sep. 2023. [278] H. W ang, A. Li, Y . Shen, B. V ucetic, and Y . Li, “Multi-user symbol- lev el precoding for downlink reconfigurable MIMO communication systems, ” in Proc. IEEE Int. Symp. W ireless Commun. Syst. (ISWCS) , Hangzhou, China, Oct. 2022, pp. 1–6. [279] K. Y ing, Z. Gao, Y . Su, T . Qin, M. Matthaiou, and R. Schober, “Re- configurable massiv e MIMO: Precoding design and channel estimation in the electromagnetic domain, ” IEEE T rans. Commun. , vol. 73, no. 5, pp. 3423–3440, May 2025. [280] I. Bahceci, M. Hasan, T . M. Duman, and B. A. Cetiner, “Efficient chan- nel estimation for reconfigurable MIMO antennas: Training techniques and performance analysis, ” IEEE T rans. W ir eless Commun. , vol. 16, no. 1, pp. 565–580, Jan. 2017. [281] M. Liang and A. Li, “Deep learning-based channel extrapolation for pattern reconfigurable massive MIMO, ” IEEE T rans. V eh. T echnol. , vol. 73, no. 3, pp. 4395–4400, Mar . 2024. [282] P . Zheng, Y . Zhang, T . Y . Al-Naffouri, M. J. Hossain, and A. Chaaban, “T ri-hybrid multi-user precoding based on electromagnetically recon- figurable antennas, ” arXiv pr eprint arXiv:2505.02254 , 2025. [283] ——, “Tri-h ybrid multi-user precoding using pattern-reconfigurable an- tennas: Fundamental models and practical algorithms, ” arXiv pr eprint arXiv:2505.08938 , 2025. [284] M. Di Renzo, A. Zappone, M. Debbah, M.-S. Alouini, C. Y uen, J. De Rosny, and S. T retyakov, “Smart radio environments empowered by reconfigurable intelligent surfaces: How it works, state of research, and the road ahead, ” IEEE J. Sel. Areas Commun. , vol. 38, no. 11, pp. 2450–2525, Nov . 2020. [285] B. Zheng, S. Lin, and R. Zhang, “Intelligent reflecting surface-aided LEO satellite communication: Cooperativ e passiv e beamforming and distributed channel estimation, ” IEEE J . Sel. Areas Commun. , vol. 40, no. 10, pp. 3057–3070, Oct. 2022. [286] Y . Y ang, B. Zheng, S. Zhang, and R. Zhang, “Intelligent reflecting surface meets OFDM: Protocol design and rate maximization, ” IEEE T r ans. Commun. , v ol. 68, no. 7, pp. 4522–4535, Jul. 2020. 35 [287] W . Shi, W . Xu, X. Y ou, C. Zhao, and K. W ei, “Intelligent reflection enabling technologies for integrated and green Internet-of-Everything beyond 5G: Communication, sensing, and security , ” IEEE Wir eless Commun. , vol. 30, no. 2, pp. 147–154, Apr . 2023. [288] W . Shi, J. Xu, W . Xu, C. Y uen, A. L. Swindlehurst, and C. Zhao, “On secrecy performance of RIS-assisted MISO systems over Rician channels with spatially random eavesdroppers, ” IEEE T r ans. W ir eless Commun. , vol. 23, no. 8, pp. 8357–8371, Aug. 2024. [289] W . Shi, J. Y ao, W . Xu, J. Xu, X. Y ou, Y . C. Eldar, and C. Zhao, “Combating interference for over-the-air federated learning: A statisti- cal approach via RIS, ” IEEE Tr ans. Signal Pr ocess. , vol. 73, pp. 936– 953, Feb. 2025. [290] P . W ang, J. Fang, B. W ang, and H. Li, “Intelligent reflecting surface- assisted adaptive beamforming for blind interference suppression, ” IEEE T rans. Signal Pr ocess. , v ol. 73, pp. 1744–1758, Apr . 2025. [291] X. Chen, J. Shi, Z. Y ang, and L. Wu, “Low-complexity channel estimation for intelligent reflecting surface-enhanced massive MIMO, ” IEEE W ir eless Commun. Lett. , vol. 10, no. 5, pp. 996–1000, May 2021. [292] S. Liu, Z. Gao, J. Zhang, M. Di Renzo, and M.-S. Alouini, “Deep denoising neural network assisted compressiv e channel estimation for mmW ave intelligent reflecting surfaces, ” IEEE T rans. V eh. T echnol. , vol. 69, no. 8, pp. 9223–9228, Aug. 2020. [293] Y . Lin, S. Jin, M. Matthaiou, and X. Y ou, “T ensor -based algebraic channel estimation for hybrid IRS-assisted MIMO-OFDM, ” IEEE T r ans. Wir eless Commun. , vol. 20, no. 6, pp. 3770–3784, Jun. 2021. [294] D. Mishra and H. Johansson, “Channel estimation and low-comple xity beamforming design for passive intelligent surface assisted MISO wireless energy transfer, ” in Proc. IEEE Int. Conf. Acoust., Speech, Signal Process. (ICASSP) , Brighton, United Kingdom, May 2019, pp. 4659–4663. [295] B. Zheng, C. Y ou, and R. Zhang, “Fast channel estimation for IRS- assisted OFDM, ” IEEE W ir eless Commun. Lett. , vol. 10, no. 3, pp. 580–584, Mar . 2021. [296] T . L. Jensen and E. De Carvalho, “ An optimal channel estimation scheme for intelligent reflecting surfaces based on a minimum variance unbiased estimator , ” in Proc. IEEE Int. Conf. Acoust. Speech Signal Pr ocess. (ICASSP) , May 2020, pp. 5000–5004. [297] B. Zheng, C. Y ou, and R. Zhang, “Intelligent reflecting surface assisted multi-user OFDMA: Channel estimation and training design, ” IEEE T r ans. W ir eless Commun. , vol. 19, no. 12, pp. 8315–8329, Dec. 2020. [298] K. Ardah, S. Gherekhloo, A. L. F . de Almeida, and M. Haardt, “TRICE: A channel estimation framework for RIS-aided millimeter -wa ve MIMO systems, ” IEEE Signal Pr ocess. Lett. , vol. 28, pp. 513–517, Feb . 2021. [299] J. Mirza and B. Ali, “Channel estimation method and phase shift design for reconfigurable intelligent surface assisted MIMO networks, ” IEEE T r ans. Cogn. Commun. Netw , vol. 7, no. 2, pp. 441–451, Feb. 2021. [300] S. Gao, P . Dong, Z. Pan, and G. Y . Li, “Deep multi-stage CSI acquisition for reconfigurable intelligent surface aided MIMO systems, ” IEEE Commun. Lett. , vol. 25, no. 6, pp. 2024–2028, Jun. 2021. [301] N. K. Kundu and M. R. McKay, “Channel estimation for reconfigurable intelligent surface aided MISO communications: From LMMSE to deep learning solutions, ” IEEE Open J. Commun. Soc. , vol. 2, pp. 471–487, Mar . 2021. [302] B. Zheng, Q. W u, and R. Zhang, “Intelligent reflecting surface-assisted multiple access with user pairing: NOMA or OMA?” IEEE Commun. Lett. , vol. 24, no. 4, pp. 753–757, Apr . 2020. [303] G. Zhou, C. Pan, H. Ren, K. W ang, M. Di Renzo, and A. Nallanathan, “Robust beamforming design for intelligent reflecting surface aided MISO communication systems, ” IEEE Wir eless Commun. Lett. , vol. 9, no. 10, pp. 1658–1662, Oct. 2020. [304] M.-M. Zhao, A. Liu, and R. Zhang, “Outage-constrained robust beam- forming for intelligent reflecting surface aided wireless communica- tion, ” IEEE T rans. Signal Process. , vol. 69, pp. 1301–1316, Feb . 2021. [305] A. Papazafeiropoulos, C. Pan, A. Elbir , P . K ourtessis, S. Chatzinotas, and J. M. Senior, “Coverage probability of distributed IRS systems under spatially correlated channels, ” IEEE W ir eless Commun. Lett. , vol. 10, no. 8, pp. 1722–1726, Aug. 2021. [306] X. Mu, Y . Liu, L. Guo, J. Lin, and R. Schober, “Joint deployment and multiple access design for intelligent reflecting surface assisted networks, ” IEEE T rans. Wir eless Commun. , vol. 20, no. 10, pp. 6648– 6664, Oct. 2021. [307] C. Y ou, B. Zheng, and R. Zhang, “Fast beam training for IRS-assisted multiuser communications, ” IEEE W ir eless Commun. Lett. , vol. 9, no. 11, pp. 1845–1849, Nov . 2020. [308] W . Mei and R. Zhang, “Distributed beam training for intelligent reflecting surface enabled multi-hop routing, ” IEEE W ir eless Commun. Lett. , vol. 10, no. 11, pp. 2489–2493, Nov . 2021. [309] H. Y ang, Z. Xiong, J. Zhao, D. Niyato, L. Xiao, and Q. W u, “Deep reinforcement learning-based intelligent reflecting surface for secure wireless communications, ” IEEE T r ans. W ir eless Commun. , vol. 20, no. 1, pp. 375–388, Jan. 2021. [310] H. Sun, L. Zhu, W . Mei, and R. Zhang, “Power measurement based channel estimation for IRS-enhanced wireless co verage, ” IEEE T r ans. W ir eless Commun. , vol. 23, no. 12, pp. 19 183–19 198, Dec. 2024. [311] ——, “Power-measurement-based channel autocorrelation estimation for IRS-assisted wideband communications, ” IEEE Tr ans. W ir eless Commun. , vol. 24, no. 6, pp. 4647–4662, Jun. 2025. [312] Z. Huang, B. Zheng, and R. Zhang, “Transforming fading channel from fast to slow: Intelligent refracting surface aided high-mobility communication, ” IEEE T rans. W ir eless Commun. , vol. 21, no. 7, pp. 4989–5003, Jul. 2022. [313] A. S. Bora, K. T . Phan, and Y . Hong, “IRS-assisted high mobility communications using O TFS modulation, ” IEEE W ir eless Commun. Lett. , vol. 12, no. 2, pp. 376–380, Feb. 2023. [314] Z. Huang, B. Zheng, and R. Zhang, “Roadside IRS-aided vehicu- lar communication: Efficient channel estimation and low-complexity beamforming design, ” IEEE T rans. W ireless Commun. , v ol. 22, no. 9, pp. 5976–5989, Sep. 2023. [315] C. Y ou, B. Zheng, W . Mei, and R. Zhang, “Ho w to deplo y intelligent reflecting surfaces in wireless network: Bs-side, user-side, or both sides?” J. Commun. Inf . Netw . , vol. 7, no. 1, pp. 1–10, Mar . 2022. [316] B. Zheng, T . Ma, J. T ang, C. Y ou, S. Lin, and K.-K. W ong, “Intel- ligent reflecting surface-aided multiuser communication: Co-design of transmit div ersity and active/passi ve precoding, ” IEEE T r ans. W ir eless Commun. , vol. 23, no. 10, pp. 13 394–13 407, Oct. 2024. [317] B. Zheng and R. Zhang, “IRS meets relaying: Joint resource allocation and passive beamforming optimization, ” IEEE W ir eless Commun. Lett. , vol. 10, no. 9, pp. 2080–2084, Sep. 2021. [318] B. Zheng and R. Zhang, “Simultaneous transmit div ersity and passive beamforming with large-scale intelligent reflecting surface, ” IEEE T r ans. Wir eless Commun. , vol. 22, no. 2, pp. 920–933, Feb . 2023. [319] C. Y ou, B. Zheng, and R. Zhang, “W ireless communication via double IRS: Channel estimation and passive beamforming designs, ” IEEE W ir eless Commun. Lett. , v ol. 10, no. 2, pp. 431–435, Feb. 2021. [320] B. Zheng and C. Y ou and R. Zhang, “Efficient channel estimation for double-IRS aided multi-user MIMO system, ” IEEE T r ans. Commun. , vol. 69, no. 6, pp. 3818–3832, Jun. 2021. [321] W . Mei and R. Zhang, “Performance analysis and user association op- timization for wireless network aided by multiple intelligent reflecting surfaces, ” IEEE T rans. Commun. , vol. 69, no. 9, pp. 6296–6312, Sep. 2021. [322] M. Fu, L. Zhu, and R. Zhang, “Multi-IRS enhanced wireless coverage: Deployment optimization based on large-scale channel knowledge, ” IEEE T rans. W ir eless Commun. , early access, 2025. [323] M. Fu, W . Mei, and R. Zhang, “Multi-passiv e/acti ve-IRS enhanced wireless coverage: Deployment optimization and cost-performance trade-off, ” IEEE T rans. W ir eless Commun. , vol. 23, no. 8, pp. 9657– 9671, Aug. 2024. [324] L. Zhu, W . Ma, Z. Xiao, and R. Zhang, “Performance analysis and optimization for movable antenna aided wideband communications, ” IEEE T rans. W ir eless Commun. , vol. 23, no. 12, pp. 18 653–18 668, Dec. 2024. [325] L. Zhu, W . Ma, and R. Zhang, “Movable-antenna array enhanced beamforming: Achieving full array gain with null steering, ” IEEE Commun. Lett. , v ol. 27, no. 12, pp. 3340–3344, Dec. 2023. [326] W . Ma, L. Zhu, and R. Zhang, “Multi-beam forming with movable- antenna array , ” IEEE Commun. Lett. , vol. 28, no. 3, pp. 697–701, Mar. 2024. [327] D. W ang, W . Mei, B. Ning, and Z. Chen, “Flexible beam coverage opti- mization for movable-antenna array , ” arXiv preprint , 2024. [328] G. Hu, Q. Wu, J. Ouyang, K. Xu, Y . Cai, and N. Al-Dhahir , “Movable- antenna-array-enabled communications with CoMP reception, ” IEEE Commun. Lett. , v ol. 28, no. 4, pp. 947–951, Apr . 2024. [329] X. Lai, J. Y ao, K. Zhi, T . W u, D. Morales-Jimenez, and K.-K. W ong, “F AS-RIS: A block-correlation model analysis, ” IEEE T rans. V eh. T echnol. , vol. 74, no. 2, pp. 3412–3417, Feb . 2025. [330] Y . Y e, L. Y ou, J. W ang, H. Xu, K.-K. W ong, and X. Gao, “Fluid antenna-assisted MIMO transmission exploiting statistical CSI, ” IEEE Commun. Lett. , v ol. 28, no. 1, pp. 223–227, Jan. 2024. [331] S. Y ang, Z. W an, Y . Xiu, B. Ning, Y . Li, Y . Liu, and C. Y uen, “Flexible WMMSE beamforming for MU-MIMO movable antenna communications, ” arXiv preprint , 2025. 36 [332] X. Pi, L. Zhu, H. Mao, Z. Xiao, X.-G. Xia, and R. Zhang, “Mov able antenna enabled near-field MU-MIMO communication, ” IEEE W ireless Commun. Lett. , 2025, early access, DOI: 10.1109/L WC.2025.3592716. [333] J. Ding, Z. Zhou, L. Zhu, Y . Zhao, B. Jiao, and R. Zhang, “Energy efficienc y maximization for movable antenna communication systems, ” arXiv preprint arXiv:2506.07129 , 2025. [334] Y . Chen, M. Chen, H. Xu, Z. Y ang, K.-K. W ong, and Z. Zhang, “Joint beamforming and antenna design for near-field fluid antenna system, ” IEEE W ir eless Commun. Lett. , vol. 14, no. 2, pp. 415–419, Feb . 2025. [335] G. Y an, L. Zhu, and R. Zhang, “Movable antenna aided multiuser communications: Antenna position optimization based on statistical channel information, ” IEEE Tr ans. Commun. , 2025, early access, DOI: 10.1109/TCOMM.2025.3638653. [336] X. Pi, L. Zhu, H. Mao, Z. Xiao, X.-G. Xia, and R. Zhang, “6D mov able antenna enhanced multi-access point coordination via position and orientation optimization, ” IEEE T rans. W ir eless Commun. , 2025, early access, DOI: 10.1109/TWC.2025.3587803. [337] Y . Zhang, Y . Zhang, L. Zhu, S. Xiao, W . T ang, Y . C. Eldar , and R. Zhang, “6DMA-aided hybrid beamforming with joint antenna po- sition and orientation optimization, ” arXiv pr eprint arXiv:2412.17088 , 2024. [338] ¨ O. ¨ Ozdogan, E. Bj ¨ ornson, and E. G. Larsson, “Massive MIMO with spatially correlated rician fading channels, ” IEEE T rans. Commun. , vol. 67, no. 5, pp. 3234–3250, May 2019. [339] Z. W ang, J. Zhang, E. Bj ¨ ornson, D. Niyato, and B. Ai, “Optimal bilinear equalizer for cell-free massive MIMO systems over correlated Rician channels, ” arXiv pr eprint arXiv:2407.18531 , 2024. [340] M. Khammassi, A. Kammoun, and M.-S. Alouini, “ A ne w analytical approximation of the fluid antenna system channel, ” IEEE T r ans. W ir eless Commun. , vol. 22, no. 12, pp. 8843–8858, Dec. 2023. [341] C. Psomas, P . J. Smith, H. A. Suraweera, and I. Krikidis, “Continuous fluid antenna systems: Modeling and analysis, ” IEEE Commun. Lett. , vol. 27, no. 12, pp. 3370–3374, Dec. 2023. [342] W . K. Ne w , K.-K. W ong, H. Xu, K.-F . T ong, and C.-B. Chae, “Fluid antenna system: New insights on outage probability and di versity gain, ” IEEE T rans. W ir eless Commun. , vol. 23, no. 1, pp. 128–140, Jan. 2024. [343] P . Ram ´ ırez-Espinosa, D. Morales-Jimenez, and K.-K. W ong, “ A new spatial block-correlation model for fluid antenna systems, ” IEEE T rans. W ir eless Commun. , vol. 23, no. 11, pp. 15 829–15 843, Nov . 2024. [344] F . Rostami Ghadi, K.-K. W ong, F . J. L ´ opez-Mart ´ ınez, and K.-F . T ong, “Copula-based performance analysis for fluid antenna systems under arbitrary fading channels, ” IEEE Commun. Lett. , vol. 27, no. 11, pp. 3068–3072, Nov . 2023. [345] K.-K. W ong, A. Shojaeifard, K.-F . T ong, and Y . Zhang, “Fluid antenna systems, ” IEEE Tr ans. W ir eless Commun. , vol. 20, no. 3, pp. 1950– 1962, Mar . 2021. [346] W . Ma, L. Zhu, and R. Zhang, “Compressed sensing based channel estimation for movable antenna communications, ” IEEE Commun. Lett. , vol. 27, no. 10, pp. 2747–2751, Oct. 2023. [347] Z. Xiao, S. Cao, L. Zhu, Y . Liu, B. Ning, X.-G. Xia, and R. Zhang, “Channel estimation for movable antenna communication systems: A framew ork based on compressed sensing, ” IEEE T rans. Wir eless Commun. , vol. 23, no. 9, pp. 11 814–11 830, Sep. 2024. [348] H. Xu, G. Zhou, K.-K. W ong, W . K. New , C. W ang, C.-B. Chae, R. Murch, S. Jin, and Y . Zhang, “Channel estimation for F AS-assisted multiuser mmW ave systems, ” IEEE Commun. Lett. , vol. 28, no. 3, pp. 632–636, Mar . 2024. [349] R. Zhang, L. Cheng, W . Zhang, X. Guan, Y . Cai, W . Wu, and R. Zhang, “Channel estimation for movable-antenna MIMO systems via tensor decomposition, ” IEEE W ir eless Commun. Lett. , vol. 13, no. 11, pp. 3089–3093, Nov . 2024. [350] Z. Xiao, S. Cao, L. Zhu, B. Ning, X.-G. Xia, and R. Zhang, “Channel estimation for mov able antenna aided wideband communication sys- tems, ” arXiv preprint , 2024. [351] J. Lee, G.-T . Gil, and Y . H. Lee, “Channel estimation via orthogonal matching pursuit for hybrid MIMO systems in millimeter wav e com- munications, ” IEEE Tr ans. Commun. , vol. 64, no. 6, pp. 2370–2386, Jun. 2016. [352] X. W ei, W . Mei, Q. Jia, D. W ang, Z. Chen, and B. Ning, “Super- resolution channel estimation for movable antennas via atomic norm minimization, ” in Proc. IEEE Int. Conf. Electron. Cir cuits Inf. Eng. (ECIE) , Guangzhou, China, May 2025, pp. 145–148. [353] C. Skouroumounis and I. Krikidis, “Fluid antenna with linear MMSE channel estimation for large-scale cellular networks, ” IEEE Tr ans. Commun. , vol. 71, no. 2, pp. 1112–1125, Dec. 2023. [354] W . K. New , K.-K. W ong, H. Xu, F . R. Ghadi, R. Murch, and C.-B. Chae, “Channel estimation and reconstruction in fluid antenna system: Oversampling is essential, ” IEEE T r ans. W ir eless Commun. , vol. 24, no. 1, pp. 309–322, Jan. 2025. [355] R. W ang, Y . Chen, Y . Hou, K.-K. W ong, and X. T ao, “Estimation of channel parameters for port selection in millimeter-wav e fluid antenna systems, ” in Proc. IEEE/CIC Int. Conf. Commun. China W orkshops (ICCC W orkshops) , Dalian, China, Aug. 2023, pp. 1–6. [356] S. Ji, C. Psomas, and J. Thompson, “Correlation-based machine learn- ing techniques for channel estimation with fluid antennas, ” in Proc. IEEE Int. Conf. Acoust., Speech, Signal Process. (ICASSP)) , Seoul, K orea., Apr. 2024, pp. 8891–8895. [357] H. Zhang, J. W ang, C. W ang, C.-C. W ang, K.-K. W ong, B. W ang, and C.-B. Chae, “Learning-induced channel extrapolation for fluid antenna systems using asymmetric graph mask ed autoencoder, ” IEEE W ireless Commun. Lett. , v ol. 13, no. 6, pp. 1665–1669, Apr . 2024. [358] S. Jang and C. Lee, “Ne w view of learning-aided channel estimation for movable antenna systems, ” IEEE T r ans. W ir eless Commun. , vol. 24, no. 7, pp. 5694–5708, Jul. 2025. [359] Y . Huang, W . Mei, X. W ei, Z. Chen, and B. Ning, “CNN-based channel map estimation for movable antenna systems, ” arXiv preprint arXiv:2505.21001 , 2025. [360] M. Cui, Z. Zhang, L. Dai, and K. Huang, “Near-optimal channel estimation for dense array systems, ” arXiv pr eprint arXiv:2404.06806 , 2024. [361] R. Zhang, Y . Zhang, L. Zhu, Y . Zhang, and R. Zhang, “ A deep learning framew ork for joint channel acquisition and communication optimiza- tion in movable antenna systems, ” arXiv preprint , 2025. [362] Z. Zhang, J. Zhu, L. Dai, and R. W . Heath Jr, “Successiv e bayesian reconstructor for channel estimation in fluid antenna systems, ” IEEE T r ans. Wir eless Commun. , vol. 24, no. 3, pp. 1992–2006, Mar . 2025. [363] X. Zeng, J. Fang, B. W ang, B. Ning, and H. Li, “CSI-free position optimization for movable antenna communication systems: A black- box optimization approach, ” IEEE W ir eless Commun. Lett. , vol. 14, no. 1, pp. 53–57, Jan. 2025. [364] G. Hu, Q. W u, K. Xu, J. Ouyang, J. Si, Y . Cai, and N. Al-Dhahir , “Fluid antennas-enabled multiuser uplink: A lo w-complexity gradient descent for total transmit po wer minimization, ” IEEE Commun. Lett. , vol. 28, no. 3, pp. 602–606, Mar . 2025. [365] J. Ding, Z. Zhou, C. W ang, W . Li, L. Lin, and B. Jiao, “Secure full- duplex communication via mov able antennas, ” in Pr oc. IEEE Global Commun. Conf. (Globecom) , Cape T own, South Africa, Dec. 2024, pp. 1–6. [366] W . Mei, X. W ei, B. Ning, Z. Chen, and R. Zhang, “Mov able-antenna position optimization: A graph-based approach, ” IEEE Wir eless Com- mun. Lett. , v ol. 13, no. 7, pp. 1853–1857, Jul. 2024. [367] W . Mei, X. W ei, Y . Liu, B. Ning, and Z. Chen, “Mov able-antenna position optimization for physical-layer security via discrete sampling, ” in Pr oc. IEEE Global Commun. Conf. (Globecom) , Cape T o wn, South Africa, Dec. 2024, pp. 1–6. [368] C. W ang, Z. Li, K.-K. W ong, R. Murch, C.-B. Chae, and S. Jin, “AI- empowered fluid antenna systems: Opportunities, challenges, and future directions, ” IEEE Wir eless Commun. , vol. 31, no. 5, pp. 34–41, Oct. 2024. [369] A. V ahid, H. Sun, and S.-C. Lin, “Mov able antenna-aided broadcast packet erasure channels: Capacity with dynamic position plan, ” IEEE Commun. Lett. , v ol. 28, no. 9, pp. 2006–2010, Sep. 2024. [370] A. V ahid, S.-C. Lin, and D. C. Sicker, “Capacity gains with dynamic position plan in distributed movable antenna-aided networks, ” IEEE Commun. Lett. , v ol. 29, no. 3, pp. 457–461, Mar . 2025. [371] Q. Li, W . Mei, B. Ning, and R. Zhang, “Minimizing movement delay for mov able antennas via trajectory optimization, ” arXiv preprint arXiv:2408.12813 , 2024. [372] H. W ang, Q. W u, Y . Gao, W . Chen, W . Mei, G. Hu, and L. Xu, “Throughput maximization for mov able antenna systems with move- ment delay consideration, ” IEEE Tr ans. W ir eless Commun. , 2025, early access, DOI: 10.1109/TWC.2025.3587526. [373] J. Y ao, T . Wu, L. Zhou, M. Jin, C. Pan, M. Elkashlan, F . Adachi, G. K. Karagiannidis, N. Al-Dhahir , and C. Y uen, “Rethinking hardware impairments in multi-user systems: Can F AS mak e a difference?” arXiv pr eprint arXiv:2412.15843 , 2024. [374] R. W ang, P . Zheng, V . V . Kotte, S. Rauf, Y . Y ang, M. M. U. Rahman, T . Y . Al-Naf fouri, and A. Shamim, “Electromagnetically reconfigurable fluid antenna system for wireless communications: De- sign, modeling, algorithm, fabrication, and experiment, ” arXiv Pr eprint arXiv:2502.19643 , 2025. 37 [375] E. T aillefer, A. Hirata, and T . Ohira, “Direction-of-arriv al estimation using radiation power pattern with an ESP AR antenna, ” IEEE T r ans. Antennas Propa g. , vol. 53, no. 2, pp. 678–684, Feb . 2005. [376] R. Qian, M. Sellathurai, and J. Chambers, “Direction-of-arrival estima- tion with single-RF ESP AR antennas via sparse signal reconstruction, ” in Pr oc. IEEE Int. W orkshop Signal Pr ocess. Adv . W ir eless Commun. (SP A WC) , Stockholm, Sweden, Jun. 2015, pp. 485–489. [377] R. Qian and M. Sellathurai, “Direction-of-arrival estimation with ESP AR antennas using Bayesian compressi ve sensing, ” in Pr oc. IEEE Int. Conf. Acoust. Speech Signal Process. (ICASSP) , Shanghai, China, Mar . 2016, pp. 3076–3080. [378] H. Y azdani, A. V osoughi, and N. Rahnav ard, “Compressive sensing based direction-of-arrival estimation using reweighted greedy block coordinate descent algorithm for ESP AR antennas, ” in Pr oc. IEEE Mil. Commun. Conf. (MILCOM) , Baltimore, MD, USA, Oct. 2017, pp. 169– 173. [379] L. Kulas, “Simple 2-D direction-of-arri val estimation using an ESP AR antenna, ” IEEE Antennas W ir eless Propa g. Lett. , vol. 16, pp. 2513– 2516, Jul. 2017. [380] ——, “RSS-based DoA estimation using ESP AR antennas and interpo- lated radiation patterns, ” IEEE Antennas W ir eless Pr opag. Lett. , v ol. 17, no. 1, pp. 25–28, Jan. 2018. [381] M. T arkowski and L. Kulas, “RSS-based DoA estimation for ESP AR antennas using support vector machine, ” IEEE Antennas Wir eless Pr opag . Lett. , v ol. 18, no. 4, pp. 561–565, Apr . 2019. [382] O. Bshara, V . Pano, M. A. S. T ajin, X. R. Rey , and K. R. Dandekar , “Noncooperativ e sub-6GHz reconfigurable antenna DoA estimation to aid mmW av e analog beamforming: Algorithm and measurements, ” IEEE Access , v ol. 9, pp. 101 876–101 885, Jul. 2021. [383] S. Abielmona, H. V . Nguyen, and C. Caloz, “ Analog direction of arrival estimation using an electronically-scanned CRLH leaky-w av e antenna, ” IEEE T rans. Antennas Pr opag. , vol. 59, no. 4, pp. 1408–1412, Apr . 2011. [384] H. Paaso, A. M ¨ ammel ¨ a, D. Patron, and K. R. Dandekar, “DoA esti- mation through modified unitary MUSIC algorithm for CRLH leaky- wav e antennas, ” in Pr oc. IEEE Int. Symp. P er s., Indoor Mobile Radio Commun. (PIMRC) , London, UK, Sep. 2013, pp. 311–315. [385] H. Paaso, N. Gulati, D. Patron, A. Hakkarainen, J. W erner , K. R. Dandekar , M. V alkama, and A. M ¨ ammel ¨ a, “DoA estimation using compact CRLH leaky-wav e antennas: Novel algorithms and measured performance, ” IEEE Tr ans. Antennas Pr opag . , vol. 65, no. 9, pp. 4836– 4849, Sep. 2017. [386] M. Poveda-Garc ´ ıa, D. Ca ˜ nete-Rebenaque, and J. L. G ´ omez-T ornero, “Frequency-scanned monopulse pattern synthesis using leaky-wav e antennas for enhanced power-based direction-of-arriv al estimation, ” IEEE T rans. Antennas Pr opa g. , v ol. 67, no. 11, pp. 7071–7086, Nov . 2019. [387] Y .-M. Ning, S. Ma, F .-Y . Meng, and Q. W u, “DO A estimation based on ESPRIT algorithm method for frequency scanning L W A, ” IEEE Commun. Lett. , v ol. 24, no. 7, pp. 1441–1445, Jul. 2020. [388] M. Poveda-Garc ´ ıa, A. G ´ omez-Alcaraz, D. Ca ˜ nete-Rebenaque, A. S. Martinez-Sala, and J. L. G ´ omez-T ornero, “RSSI-based direction-of- departure estimation in bluetooth low energy using an array of frequency-steered leaky-wav e antennas, ” IEEE Access , vol. 8, pp. 9380–9394, Jan. 2020. [389] R. S. Zakariyya, X. W entau, Y . Zhang, R. W ang, Y . Huang, C. Duan, and Q. Zhang, “Joint DoA and CFO estimation scheme with received beam scanned leaky wav e antenna for industrial internet of things (IIoT) systems, ” IEEE Internet Things J. , vol. 10, no. 15, pp. 13 686– 13 696, Aug. 2023. [390] J. W erner , J. W ang, A. Hakkarainen, N. Gulati, D. Patron, D. Pfeil, K. Dandekar , D. Cabric, and M. V alkama, “Sectorized antenna-based DoA estimation and localization: Advanced algorithms and measure- ments, ” IEEE J . Sel. Areas Commun. , vol. 33, no. 11, pp. 2272–2286, Nov . 2015. [391] S. Pell and A. Willig, “Using a drone formation with sectored antennas in search-and-rescue: Heuristics for orienting drones and moving the formation, ” in Proc. IEEE Int. Symp. P er s., Indoor Mobile Radio Commun. (PIMRC) , K yoto, Japan, Sep. 2022, pp. 1269–1275. [392] M. Rzymowski, P . W oznica, and L. Kulas, “Single-anchor indoor localization using ESP AR antenna, ” IEEE Antennas W ir eless Pr opag. Lett. , vol. 15, pp. 1183–1186, Nov . 2016. [393] M. Groth, K. Nyka, and L. Kulas, “Fast calibration-free single- anchor indoor localization based on limited number of ESP AR antenna radiation patterns, ” in Proc. Eur . Conf. Antennas Pr opag. (EuCAP) , Florence, Italy , Mar . 2023, pp. 1–5. [394] A. Hakkarainen, J. W erner , N. Gulati, D. Patron, D. Pfeil, H. Paaso, A. M ¨ ammel ¨ a, K. Dandekar, and M. V alkama, “Reconfigurable an- tenna based DO A estimation and localization in cognitiv e radios: Low complexity algorithms and practical measurements, ” in Proc. Int. Conf. Cognit. Radio Oriented W ir eless Netw . Commun. (CR O WNCOM) , Oulu, Finland, Jun. 2014, pp. 454–459. [395] J. W erner, J. W ang, A. Hakkarainen, M. V alkama, and D. Cabric, “Primary user localization in cognitive radio networks using sectorized antennas, ” in Pr oc. Int. Conf. W ir eless On-demand Netw . Syst. Serv . (WONS) , Banff, AB, Canada, Mar . 2013, pp. 155–161. [396] J. W ang, J. W erner, M. V alkama, and D. Cabric, “Performance analysis of primary user RSS/DoA estimation and localization in cognitiv e radio networks using sectorized antennas, ” IEEE W ir eless Commun. Lett. , vol. 3, no. 2, pp. 237–240, Apr . 2014. [397] J. W erner, J. W ang, A. Hakkarainen, D. Cabric, and M. V alkama, “Performance and Cramer–Rao bounds for DoA/RSS estimation and transmitter localization using sectorized antennas, ” IEEE T rans. V eh. T echnol. , vol. 65, no. 5, pp. 3255–3270, May 2016. [398] K. Chen, C. Qi, and O. A. Dobre, “DBRAA: Sub-6 GHz and millimeter wav e dual-band reconfigurable antenna array for ISAC, ” IEEE T r ans. Commun., early access , 2025. [399] A. Fadakar , Y . Zhang, H. Chen, M. F . Keskin, H. W ymeersch, and A. F . Molisch, “Hybrid codebook design for localization using elec- tromagnetically reconfigurable fluid antenna system, ” arXiv preprint arXiv:2508.21351 , 2025. [400] J. Chen, X. Lei, Y . Zhang, K. Meng, and C. Masouros, “In- tegrated sensing and communication with tri-hybrid beamforming across electromagnetically reconfigurable antennas, ” arXiv preprint arXiv:2510.14530 , 2025. [401] P . Zheng, R. W ang, Y . Zhang, M. J. Hossain, A. Chaaban, A. Shamim, and T . Y . Al-Naffouri, “Electromagnetically reconfigurable antennas for 6G: Enabling technologies, prototype studies, and research outlook, ” arXiv preprint arXiv:2506.00657 , 2025. [402] K. A. Gotsis, K. Siakavara, and J. N. Sahalos, “On the direction of arriv al (DoA) estimation for a switched-beam antenna system using neural networks, ” IEEE T rans. Antennas Propag . , vol. 57, no. 5, pp. 1399–1411, May 2009. [403] A. Badawy , T . Khattab, D. Trinchero, T . ElFouly , and A. Mohamed, “ A simple angle of arri v al estimation system, ” in Pr oc. IEEE Wir eless Commun. Networking Conf. (WCNC) , San Francisco, CA, USA, Mar . 2017, pp. 1–6. [404] W . Lu, B. Deng, Q. Fang, X. W en, and S. Peng, “Intelligent reflecting surface-enhanced target detection in MIMO radar, ” IEEE Sens. Lett. , vol. 5, no. 2, pp. 1–4, Feb . 2021. [405] A. Aubry , A. De Maio, and M. Rosamilia, “Reconfigurable intelligent surfaces for N-LOS radar surveillance, ” IEEE Tr ans. V eh. T echnol. , vol. 70, no. 10, pp. 10 735–10 749, Oct. 2021. [406] X. Song, J. Xu, F . Liu, T . X. Han, and Y . C. Eldar, “Intelligent reflecting surface enabled sensing: Cram ´ er-Rao bound optimization, ” IEEE T rans. Signal Process. , vol. 71, pp. 2011–2026, Jan. 2023. [407] H. Zhang, H. Zhang, B. Di, K. Bian, Z. Han, and L. Song, “MetaRadar: Multi-target detection for reconfigurable intelligent surface aided radar systems, ” IEEE Tr ans. W ir eless Commun. , vol. 21, no. 9, pp. 6994– 7010, Sep. 2022. [408] K. Meng, Q. Wu, R. Schober , and W . Chen, “Intelligent reflecting surface enabled multi-tar get sensing, ” IEEE T r ans. Commun. , vol. 70, no. 12, pp. 8313–8330, Dec. 2022. [409] Q. Peng, Q. W u, W . Chen, S. Ma, M.-M. Zhao, and O. A. Dobre, “Semi-passiv e intelligent reflecting surface-enabled sensing systems, ” IEEE T rans. Commun. , v ol. 72, no. 12, pp. 7674–7688, Dec. 2024. [410] X. Shao and R. Zhang, “T arget-mounted intelligent reflecting surf ace for secure wireless sensing, ” IEEE T rans. Wir eless Commun. , vol. 23, no. 8, pp. 9745–9758, Aug. 2024. [411] P . W ang, W . Mei, J. Fang, and R. Zhang, “T arget-mounted intelligent reflecting surface for joint location and orientation estimation, ” IEEE J. Select. Areas Commun. , vol. 41, no. 12, pp. 3768–3782, Dec. 2023. [412] X. Shao and R. Zhang, “Controllable wireless sensing via target- mounted intelligent reflecting surface, ” in Pr oc. IEEE Global Commun. Conf. (Globecom) , Dec. 2023, pp. 4865–4870. [413] B. Zheng, X. Xiong, T . Ma, J. T ang, D. W . K. Ng, A. L. Swindlehurst, and R. Zhang, “Intelligent reflecting surface-enabled anti-detection for secure sensing and communications, ” IEEE W ir eless Commun. , vol. 32, no. 2, pp. 156–163, Apr. 2025. [414] B. Zheng, X. Xiong, J. T ang, and R. Zhang, “Intelligent reflecting surface-aided electromagnetic stealth against radar detection, ” IEEE T r ans. Signal Pr ocess. , vol. 72, pp. 3438–3452, Jun. 2024. 38 [415] X. Xiong, B. Zheng, A. L. Swindlehurst, J. T ang, and W . W u, “ A new intelligent reflecting surface-aided electromagnetic stealth strategy , ” IEEE W ir eless Commun. Lett. , vol. 13, no. 5, pp. 1498–1502, May 2024. [416] Q. Wu, B. Zheng, G. Zhang, D. W . K. Ng, and A. L. Swindlehurst, “In- telligent reflecting surface-aided electromagnetic stealth over extended regions, ” IEEE W ir eless Commun. Lett. , vol. 14, no. 6, pp. 1628–1632, Jun. 2025. [417] H. W ang, B. Zheng, X. Shao, and R. Zhang, “Intelligent reflecting surface-aided radar spoofing, ” IEEE W ireless Commun. Lett. , vol. 13, no. 10, pp. 2722–2726, Oct. 2024. [418] X. Zhou, S. Y an, Q. Wu, F . Shu, and D. W . K. Ng, “Intelligent reflecting surface (IRS)-aided covert wireless communications with delay constraint, ” IEEE T rans. W ireless Commun. , vol. 21, no. 1, pp. 532–547, Jan. 2022. [419] X. Lu, E. Hossain, T . Shafique, S. Feng, H. Jiang, and D. Niyato, “In- telligent reflecting surface enabled covert communications in wireless networks, ” IEEE Netw . , vol. 34, no. 5, pp. 148–155, Jun. 2020. [420] S. P . Chepuri, N. Shlezinger , F . Liu, G. C. Alexandropoulos, S. Buzzi, and Y . C. Eldar , “Integrated sensing and communications with reconfig- urable intelligent surfaces: From signal modeling to processing, ” IEEE Signal Process. Mag. , vol. 40, no. 6, pp. 41–62, Sep. 2023. [421] A. F ascista, M. F . Keskin, A. Coluccia, H. W ymeersch, and G. Seco- Granados, “RIS-aided joint localization and synchronization with a single-antenna receiver: Beamforming design and low-complexity esti- mation, ” IEEE J. Sel. T opics Signal Pr ocess. , vol. 16, no. 5, pp. 1141– 1156, Aug. 2022. [422] R. S. P . Sankar , S. P . Chepuri, and Y . C. Eldar, “Beamforming in integrated sensing and communication systems with reconfigurable intelligent surfaces, ” IEEE Tr ans. W ir eless Commun. , vol. 23, no. 5, pp. 4017–4031, May 2024. [423] R. Liu, M. Li, and A. L. Swindlehurst, “Joint beamforming and reflection design for RIS-assisted ISAC systems, ” in Pr oc. 30th Eur . Signal Process. Conf. (EUSIPCO) , Aug. 2022, pp. 997–1001. [424] M. Hua, Q. W u, C. He, S. Ma, and W . Chen, “Joint activ e and passiv e beamforming design for IRS-aided radar-communication, ” IEEE T rans. W ir eless Commun. , vol. 22, no. 4, pp. 2278–2294, Apr . 2023. [425] X. W ang, Z. Fei, and Q. Wu, “Integrated sensing and communication for RIS-assisted backscatter systems, ” IEEE Internet Things J. , vol. 10, no. 15, pp. 13 716–13 726, Aug. 2023. [426] X. Song, D. Zhao, H. Hua, T . X. Han, X. Y ang, and J. Xu, “Joint transmit and reflectiv e beamforming for IRS-assisted integrated sensing and communication, ” in Proc. IEEE W ir eless Commun. Netw . Conf. (WCNC) , Apr . 2022, pp. 189–194. [427] Z.-M. Jiang, M. Rihan, P . Zhang, L. Huang, Q. Deng, J. Zhang, and E. M. Mohamed, “Intelligent reflecting surface aided dual-function radar and communication system, ” IEEE Syst. J. , vol. 16, no. 1, pp. 475–486, Mar . 2022. [428] Z. Zhang, W . Chen, Q. W u, Z. Li, X. Zhu, and J. Y uan, “Intelligent omni surfaces assisted integrated multi-target sensing and multi-user MIMO communications, ” IEEE T rans. Commun. , vol. 72, no. 8, pp. 4591–4606, Mar . 2024. [429] Z. Gao, Z. W an, D. Zheng, S. T an, C. Masouros, D. W . K. Ng, and S. Chen, “Integrated sensing and communication with mmW a ve massiv e MIMO: A compressed sampling perspectiv e, ” IEEE T rans. W ir eless Commun. , vol. 22, no. 3, pp. 1745–1762, Mar . 2023. [430] R. Li, X. Shao, S. Sun, M. T ao, and R. Zhang, “Beam scanning for integrated sensing and communication in IRS-aided mmwav e systems, ” in Pr oc. IEEE Int. W orkshop Signal Pr ocess. Adv . W ir eless Commun. (SP A WC) , Sep. 2023, pp. 196–200. [431] Y . Zeng, Z. Dong, H. W ang, L. Zhu, Z. Hong, Q. Jiang, D. W ang, S. Jin, and R. Zhang, “Fixed and mov able antenna technology for 6G inte- grated sensing and communication, ” arXiv pr eprint arXiv:2407.04404 , 2024. [432] W . Ma, L. Zhu, and R. Zhang, “Movable-antenna trajectory optimiza- tion for wireless sensing: CRB scaling laws o ver time and space, ” arXiv pr eprint arXiv:2509.14905 , 2025. [433] H. Mao, L. Zhu, W . Ma, Z. Xiao, X.-G. Xia, and R. Zhang, “Mov able- antenna array enhanced multi-target sensing: CRB characterization and optimization, ” arXiv preprint , 2025. [434] X. Shao, C. Y ou, W . Ma, X. Chen, and R. Zhang, “T ar get sensing with intelligent reflecting surface: Architecture and performance, ” IEEE J. Select. Areas Commun. , vol. 40, no. 7, pp. 2070–2084, Jul. 2022. [435] L. Zhu, H. Sun, W . Ma, Z. Xiao, and R. Zhang, “Multiuser commu- nications aided by cross-linked movable antenna array: Architecture and optimization, ” IEEE T r ans. W ir eless Commun. , 2025, early access, DOI: 10.1109/TWC.2025.3626388. [436] H. Lu, Y . Zeng, S. Jin, and R. Zhang, “Group mov able antenna with flexible sparsity: Joint array position and sparsity optimization, ” IEEE W ir eless Commun. Lett. , v ol. 13, no. 12, pp. 3573–3577, Dec. 2024. [437] X. Shi, X. Shao, and R. Zhang, “Capacity maximization for base station with hybrid fixed and movable antennas, ” IEEE W ir eless Commun. Lett. , vol. 13, no. 10, pp. 2877–2881, Oct. 2024. [438] Y . Xiu, Y . Zhao, S. Y ang, M. Xu, D. Niyato, Y . Li, and N. W ei, “Delay minimization for movable antennas-enabled anti-jamming communica- tions with mobile edge computing, ” arXiv pr eprint arXiv:2409.14418 , 2024. [439] Y . Xiu, Y . Zhao, R. Y ang, H. T ang, L. Qu, M. Khabbaz, C. Assi, and N. W ei, “Latency minimization for movable antennas-enabled relay- aided D2D mobile edge computing communication systems, ” arXiv pr eprint arXiv:2412.11351 , 2024. [440] Y . Zuo, J. Guo, B. Sheng, C. Dai, F . Xiao, and S. Jin, “Fluid antenna for mobile edge computing, ” IEEE Commun. Lett. , vol. 28, no. 7, pp. 1728–1732, Jul. 2024. [441] P . Chen, Y . Y ang, B. L yu, Z. Y ang, and A. Jamalipour, “Movable antenna-enhanced wireless powered mobile edge computing systems, ” IEEE Internet Things J. , vol. 11, no. 21, pp. 35 505–35 518, Nov . 2024. [442] D. Zhang, S. Y e, M. Xiao, K. W ang, M. Di Renzo, and M. Skoglund, “Fluid antenna array enhanced o ver -the-air computation, ” IEEE W ir e- less Commun. Lett. , vol. 13, no. 6, pp. 1541–1545, Jun. 2024. [443] N. Li, P . W u, B. Ning, L. Zhu, and W . Mei, “Over-the-air computation via 2D movable antenna array , ” IEEE W ir eless Commun. Lett. , vol. 14, no. 1, pp. 33–37, Jan. 2025. [444] Z. Cheng, N. Li, J. Zhu, X. She, C. Ouyang, and P . Chen, “Mov- able antenna-empowered AirComp, ” arXiv preprint , 2023. [445] Y . Ma, K. Liu, L. Zhu, Y . Liu, Y . Zhu, and D. B. da Costa, “Movable antenna-enhanced secure communication: Opportunities, challenges, and solutions, ” arXiv pr eprint arXiv:2509.00894 , 2025. [446] L. Zhu, H. Mao, W . Ma, Z. Xiao, J. Zhang, and R. Zhang, “T owed mov able antenna (T oMA) array for ultra secure airborne communica- tions, ” arXiv preprint , 2025. [447] G. Hu, Q. W u, K. Xu, J. Si, and N. Al-Dhahir, “Secure wireless communication via mo vable-antenna array , ” IEEE Signal Pr ocess. Lett. , vol. 31, pp. 516–520, Jan. 2024. [448] Z. Cheng, N. Li, J. Zhu, X. She, C. Ouyang, and P . Chen, “Enabling secure wireless communications via movable antennas, ” in Proc. IEEE Int. Conf. Acoust., Speech, Signal Pr ocess. (ICASSP)) , Seoul, Korea., Apr . 2024, pp. 9186–9190. [449] J. T ang, C. Pan, Y . Zhang, H. Ren, and K. W ang, “Secure MIMO communication relying on movable antennas, ” IEEE T r ans. Commun. , vol. 73, no. 4, pp. 2159–2175, Apr . 2025. [450] J. Liao, F . Zhu, and G. Hu, “Jamming-assisted wireless information surveillance with movable antenna, ” IEEE Commun. Lett. , vol. 28, no. 12, pp. 2739–2743, Dec. 2024. [451] G. Hu, Q. W u, D. Xu, K. Xu, J. Si, Y . Cai, and N. Al-Dhahir , “Movable antennas-assisted secure transmission without eav esdroppers’ instanta- neous CSI, ” IEEE T rans. Mobile Comput. , vol. 23, no. 12, pp. 14 263– 14 279, Dec. 2024. [452] Z. Feng, Y . Zhao, K. Y u, and D. Li, “Movable antenna empow- ered physical layer security without Eve’ s CSI: Joint optimization of beamforming and antenna positions, ” arXiv pr eprint arXiv:2405.16062 , 2024. [453] Z. Cheng, C. Ouyang, and X. Zhang, “Movable antenna aided physical layer security with no eavesdropper CSI, ” in Proc. IEEE Int. Conf. Acoust., Speech, Signal Pr ocess. (ICASSP) , Hyderabad, India, Apr . 2025, pp. 7508–7513. [454] H. Mao, X. Pi, L. Zhu, Z. Xiao, X.-G. Xia, and R. Zhang, “Sum rate maximization for movable antenna enhanced multiuser cov ert communications, ” IEEE W ir eless Commun. Lett. , vol. 14, no. 3, pp. 611–615, Mar . 2025. [455] Y . W ang, G. Hu, X. Hu, X. Lu, and Y . Huang, “Movable antenna array aided ultra reliable covert communications, ” arXiv preprint arXiv:2412.20417 , 2024. [456] W . Xie, Z. Li, C. Y u, H. Xu, J. W ang, W . Wu, X. Li, and L. Y ang, “Mov able antenna-assisted covert communications with reconfigurable intelligent surfaces, ” IEEE Internet Things J. , vol. 12, no. 9, pp. 12 369– 12 382, May 2025. [457] P . Liu, J. Si, Z. Cheng, Z. Li, and H. Hu, “Mov able-antenna enabled covert communication, ” IEEE W ir eless Commun. Lett. , vol. 14, no. 2, pp. 280–284, Feb . 2025. [458] L. Zhang, H. Y ang, Y . Zhao, and J. Hu, “Joint port selection and beamforming design for fluid antenna assisted integrated data and 39 energy transfer, ” IEEE W ir eless Commun. Lett. , vol. 13, no. 7, pp. 1833–1837, Jul. 2024. [459] J. Xiao, Y . Liu, Y . Chen, X. Wu, and F . Hou, “Throughput maxi- mization for movable antenna and IRS enhanced wireless powered IoT networks, ” in Proc. IEEE W ir eless Commun. Networking Conf. (WCNC) , Dubai, United Arab Emirates, Apr . 2024. [460] F . Rostami Ghadi, K.-K. W ong, W . K. New , H. Xu, R. Murch, and Y . Zhang, “On performance of RIS-aided fluid antenna systems, ” IEEE W ir eless Commun. Lett. , v ol. 13, no. 8, pp. 2175–2179, Aug. 2024. [461] C. Psomas, K. Ntougias, N. Shanin, D. Xu, K. Mayer, N. M. Tran, L. Cottatellucci, K. W . Choi, D. I. Kim, R. Schober, and I. Krikidis, “W ireless information and energy transfer in the era of 6G communi- cations, ” Pr oc. IEEE , pp. 1–41, May 2024. [462] K.-K. W ong, K.-F . T ong, and C.-B. Chae, “Fluid antenna system – Part II: Research opportunities, ” IEEE Commun. Lett. , vol. 27, no. 8, pp. 1924–1928, Aug. 2023. [463] C. Skouroumounis and I. Krikidis, “Simultaneous information and energy transfer in large-scale F A-enabled cellular netw orks, ” in Pr oc. IEEE Int. Conf . Commun. (ICC) , Denv er , CO, USA, Jun. 2024. [464] X. Lai, K. Zhi, W . Li, T . Wu, C. Pan, and M. Elkashlan, “F AS-assisted wireless powered communication systems, ” in Proc. IEEE Int. Conf. Commun. W orkshops (ICC W orkshops) , Denv er , CO, USA, Jun. 2024. [465] C. Skouroumounis and I. Krikidis, “SWIPT in F A-enabled cellular networks: A stochastic geometry copula-based approach, ” in Proc. IEEE Int. Conf . Commun. (ICC) , Denv er , CO, USA, Jun. 2024. [466] X. Lin, H. Y ang, Y . Zhao, J. Hu, and K.-K. W ong, “Performance analysis of integrated data and energy transfer assisted by fluid antenna systems, ” in Proc. IEEE Int. Conf. Commun. (ICC) , Denver , CO, USA, Jun. 2024. [467] X. Lin, Y . Zhao, H. Y ang, J. Hu, and K.-K. W ong, “Fluid antenna multiple access assisted integrated data and energy transfer: Outage and multiplexing gain analysis, ” IEEE T rans. W ir eless Commun. , 2025, early access, DOI: 10.1109/TWC.2025.3562921. [468] Y . Mao, O. Dizdar, B. Clerckx, R. Schober, P . Popovski, and H. V . Poor , “Rate-splitting multiple access: Fundamentals, survey , and future research trends, ” IEEE Commun. Surve ys T uts. , vol. 24, no. 4, pp. 2073–2126, 4th Quart. 2022. [469] Y . Liu, S. Zhang, X. Mu, Z. Ding, R. Schober , N. Al-Dhahir , E. Hos- sain, and X. Shen, “Evolution of NOMA toward next generation multiple access (NGMA) for 6G, ” IEEE J. Select. Ar eas Commun. , vol. 40, no. 4, pp. 1037–1071, Apr . 2022. [470] B. Clerckx, Y . Mao, Z. Y ang, M. Chen, A. Alkhateeb, L. Liu, M. Qiu, J. Y uan, V . W . S. W ong, and J. Montojo, “Multiple access techniques for intelligent and multifunctional 6G: T utorial, surv ey , and outlook, ” Pr oc. IEEE , v ol. 112, no. 7, pp. 832–879, Jul. 2024. [471] N. Li, P . W u, B. Ning, and L. Zhu, “Sum rate maximization for mov able antenna enabled uplink NOMA, ” IEEE Wir eless Commun. Lett. , vol. 13, no. 8, pp. 2140–2144, Aug. 2024. [472] Y . Zhou, W . Chen, Q. W u, X. Zhu, and N. Cheng, “Mov able antenna empowered do wnlink NOMA systems: Power allocation and antenna position optimization, ” IEEE W ir eless Commun. Lett. , vol. 13, no. 10, pp. 2772–2776, Oct. 2024. [473] X. He, W . Chen, Q. W u, X. Zhu, and N. Cheng, “Mov able antenna enhanced NOMA short-packet transmission, ” IEEE Commun. Lett. , vol. 28, no. 9, pp. 2196–2200, Sep. 2024. [474] Y . Gao, Q. Wu, and W . Chen, “Movable antennas enabled wireless- powered NOMA: Continuous and discrete positioning designs, ” arXiv pr eprint arXiv:2409.20485 , 2024. [475] A. Amhaz, M. Elhattab, C. Assi, and S. Sharafeddine, “Optimizing downlink C-NOMA transmission with movable antennas: A DDPG- based approach, ” arXiv pr eprint arXiv:2409.18281 , 2024. [476] Z. Xiao, Z. Li, L. Zhu, B. Ning, D. B. da Costa, X.-G. Xia, and R. Zhang, “Mov able antenna aided NOMA: Joint antenna positioning, precoding, and decoding design, ” arXiv pr eprint arXiv:2412.12531 , 2024. [477] C. Zhang, S. Peng, Y . Xu, Q. W u, X. Ou, X. Guo, D. He, and W . Zhang, “Sum rate maximization for movable antenna-aided do wnlink RSMA systems, ” arXiv preprint , 2024. [478] F . R. Ghadi, K.-K. W ong, F . J. Lopez-Martinez, L. Hanzo, and C.- B. Chae, “Fluid antenna-aided rate-splitting multiple access, ” arXiv pr eprint arXiv:2411.11453 , 2024. [479] J.-M. Kang, “Deep learning enabled multicast beamforming with mov able antenna array , ” IEEE W ireless Commun. Lett. , v ol. 13, no. 7, pp. 1848–1852, Jul. 2024. [480] X. T ang, Y . Jiang, J. Liu, Q. Du, D. Niyato, and Z. Han, “Deep learning- assisted jamming mitigation with movable antenna array , ” IEEE T rans. V eh. T echnol. , 2025, early access, DOI: 10.1109/TVT .2025.3558595. [481] C. W eng, Y . Chen, L. Zhu, and Y . W ang, “Learning-based joint beamforming and antenna mov ement design for mov able antenna systems, ” IEEE W ir eless Commun. Lett. , vol. 13, no. 8, pp. 2120–2124, Aug. 2024. [482] N. W aqar, K.-K. W ong, C.-B. Chae, R. Murch, S. Jin, and A. Sharples, “Opportunistic fluid antenna multiple access via team-inspired rein- forcement learning, ” IEEE T rans. W ir eless Commun. , vol. 23, no. 9, pp. 12 068–12 083, Sep. 2024. [483] Y . Bai, B. Xie, R. Zhu, Z. Chang, and R. Jantti, “Movable antenna-equipped U A V for data collection in backscatter sensor net- works: A deep reinforcement learning-based approach, ” arXiv preprint arXiv:2411.13970 , 2024. [484] Y . Zhao, Y . Xiu, M. Xu, P . W ang, and N. W ei, “Movable antenna- aided federated learning with over-the-air aggregation: Joint optimiza- tion of positioning, beamforming, and user selection, ” arXiv pr eprint arXiv:2411.06721 , 2024. [485] M. Ahmadzadeh, S. Pakrav an, G. A. Hodtani, M. Zeng, and J.-Y . Chouinard, “Enhancement of ov er-the-air federated learning by using AI-based fluid antenna system, ” arXiv preprint , 2024. [486] Y . Li, Z. W an, C. Sun, K. Feng, K. Y ing, W . Ma, L. Zhu, X. Shao, W . Mei, Z. Xiao, Z. Gao, and R. Zhang, “AI signal processing paradigm for mov able antenna: From spatial position optimization to electromagnetic reconfigurability , ” arXiv pr eprint arXiv:2510.19209 , 2025. [487] A. Creswell, T . White, V . Dumoulin, K. Arulkumaran, B. Sengupta, and A. A. Bharath, “Generative adversarial networks: An overvie w , ” IEEE Signal Pr ocess. Mag. , vol. 35, no. 1, pp. 53–65, Jan. 2018. [488] F . Jiang, Y . Peng, L. Dong, K. W ang, K. Y ang, C. Pan, D. Niyato, and O. A. Dobre, “Large language model enhanced multi-agent systems for 6G communications, ” IEEE W ireless Commun. , vol. 31, no. 6, pp. 48–55, Dec. 2024.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment