Modal Energy for Power System Analysis: Definitions and Requirements
Modal energy provides information complementary to and based on conventional eigenvalues and participation factors for power system modal analysis. However, modal energy definition is not unique. This letter clarifies the definitions and applicabilit…
Authors: J. Liu, F. Milano
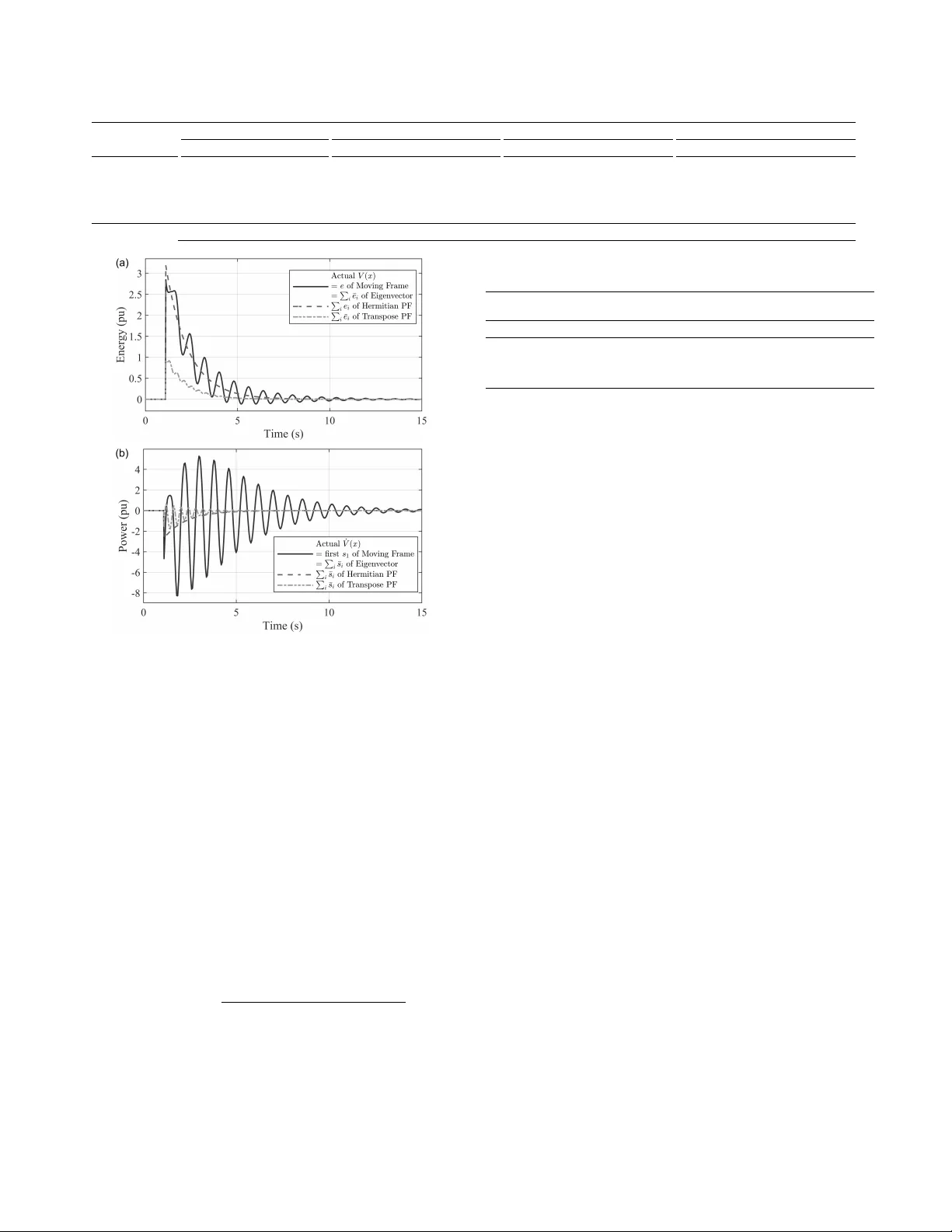
1 Modal Ener gy for Po wer System Analysis: Definitions and Requirements Jiahao Liu, IEEE Member , and Federico Milano, IEEE F ellow Abstract —Modal energy pr ovides information complementary to and based on con ventional eigen values and participation factors for po wer system modal analysis. However , modal ener gy definition is not unique. This letter clarifies the definitions and applicability of mainstream modal energy approaches, f ocusing on their mappings to eigen values and to the total system energy . It is shown that these mappings hold only under restrictiv e con- ditions, notably system normality , which limits their applicability in inverter -dominated power systems. Index T erms —Modal energy , energy flow , energy dissipation, eigen values, participation factors. I . I N T RO D U C T I O N P O WER system small-signal stability is commonly as- sessed using modal analysis, with eigen values and par - ticipation factors as indices [1], [2]. Modal ener gy has been proposed as a tool to ev aluate the amount of energy associated with each mode and how this energy is dissipated. Howe ver , unlike eigen values, modal energy does not have a unique defi- nition. In [3], system power is decomposed into modal po wer , and the relationship between modal power and modal energy is later established through eigen vectors in [4]. More recent definitions are based on participation factors (PFs) [5]. These modal energy definitions are applied in po wer system studies by relating modal quantities to physical energy . For example, eigen vector -based modal ener gy is used to ev aluate system stability [4], PF-based modal ener gy is used to represent modal damping [6], [7], and the sum of modal energies is used to define a total action for multi-mode oscillation control [8]. All definitions abov e come with limitations and may show inconsistencies. For example, under the PF-based definition, the sum of modal energies does not strictly represent the total system damping energy [9], which may lead to improper con- trol design when modal energy is used as a control objectiv e. Another example is reported in [8], where modal energy can be complex values, which is inconsistent with physical energy that must be real valued. This letter clarifies the applicability of different modal energy definitions to power system dynamics by examining: (i) the condition under which modal energy can be mapped to eigen values; (ii) the condition under which modal energy is guaranteed to be real v alued; and (iii) the condition under which modal energy can be related to the total system ener gy . It is sho wn that these conditions hold only under restricti ve cases, such as when the system state matrix is normal. J. Liu and F . Milano are with the School of Electrical and Electronic Engineering, Uni versity Colle ge Dublin, Belfield Campus, D04V1W8, Ireland. E-mails: jiahao.liu@ucd.ie, federico.milano@ucd.ie This work is supported by the Sustainable Energy Authority of Ireland (SEAI) by funding J. Liu and F . Milano under the project FRESLIPS, Grant No. RDD/00681. I I . D E FI N I T I O N S O F M O DA L E N E R G Y The starting point is a the usual nonlinear formulation as an ODE: ˙ ξ = f ( ξ ) . (1) An equilibrium point of (1), say ξ o , satisfies 0 = f ( ξ o ) . Linearization at ξ o leads to: ˙ x = Ax , (2) where x = ξ − ξ o and A = ∇ T f | ξ o is the state matrix of the system. Assume that A has eigen values ¯ λ i with corresponding right eigenv ectors ¯ v i and left eigen vectors ¯ u i , where the ov erbar ¯ ( · ) indicates that these quantities may be complex. They satisfy A ¯ v i = ¯ λ i ¯ v i , (3a) ¯ u T i A = ¯ λ i ¯ u T i . (3b) Define matrices ¯ V = [ ¯ v 1 · · · ¯ v n ] and ¯ U = [ ¯ u 1 · · · ¯ u n ] . The following identity , used in the next section, holds V U T = I . (4) The total ener gy and power of (2) are expressed as V ( x ) = 1 2 x T P x , (5a) ˙ V ( x ) = x T P ˙ x , (5b) where P is a positi ve definite matrix. Alternati vely , a normal- ized energy is obtained by choosing P = I in (5). T o connect energy in (5) with modal analysis, sev eral definitions of modal energy are introduced [3]–[5]. The main- stream definitions, denoted by e i and s i for modal energy and power , are summarized in T able I and include four types. The moving frame-based definition uses an orthogonal moving frame ψ i . The eigen vector-based definition uses both left and right eigenv ectors. The Hermitian PF-based and transpose PF-based definitions use a new state vector constructed as ¯ z i = ¯ v i ¯ u T i x . (6) I I I . M O D A L E N E R G Y R E Q U I R E M E N T S T o be consistent with physical systems, such as electric grids, namely systems that must undergo the principles of thermodynamics, modal ener gy should satisfy the follo wing three conditions: • Domain of modal energy : Modal energy should be a real-valued quantity to preserve the physical meaning of energy in power systems. • Mapping between modal and total energy : The sum of all modal energies should equal the system total energy V ( x ) defined in (5), so that modal energy provides a complete representation of power system energy . 2 T ABLE I M O DA L E N E R GY DE FI N I TI O N S AN D P R O P ERT IE S Method Moving Frame-Based Eigen vector-Based Hermitian PF-Based T ranspose PF-Based Definitions Energy T ype Normalized Physical Normalized Physical Normalized Physical Normalized Physical Modal Energy e = 1 2 x T x e = 1 2 x T P x ¯ e i = 1 2 x T ¯ v i ¯ u T i x ¯ e i = 1 2 x T P ¯ v i ¯ u T i x e i = 1 2 ¯ z H i ¯ z i e i = 1 2 ¯ z H i P ¯ z i ¯ e i = 1 2 ¯ z T i ¯ z i ¯ e i = 1 2 ¯ z T i P ¯ z i Modal Power s i = ψ T i ˙ x s i = ψ T i P ˙ x ¯ s i = x T ¯ v i ¯ u T i ˙ x ¯ s i = x T P ¯ v i ¯ u T i ˙ x ¯ s i = ¯ z H i ˙ ¯ z i ¯ s i = ¯ z H i P ˙ ¯ z i ¯ s i = ¯ z T i ˙ ¯ z i ¯ s i = ¯ z T i P ˙ ¯ z i Properties Eigen value s i = 2 ¯ λ i e ¯ s i = 2 ¯ λ i ¯ e i always ¯ s i = 2 ¯ λ i e i always ¯ s i = 2 ¯ λ i ¯ e i always Energy V alue e is real ¯ e i is complex e i is real ¯ e i is complex Energy Sum e ≡ V ( x ) P ∀ i ¯ e i = V ( x ) P ∀ i e i = V ( x ) P ∀ i e i = V ( x ) Moreov er , the following feature is desirable: • Mapping between eigen values and modal ener gies : As eigen values are well-established indices, it is desirable to establish a clear relationship between each eigen value and the corresponding modal energy . In the following, the four modal energy definitions intro- duced in Section II are re visited in vie w of the three require- ments above. Main features and properties are summarized in T able I. 1) Moving-F rame-Based: Re garding the relationship be- tween eigen v alue and modal energy , we ha ve s i e = x T P Ax 1 2 x T P x when x = ¯ v = ¯ v T P ¯ λ i ¯ v 1 2 ¯ v T P ¯ v = 2 ¯ λ i ¯ v T P ¯ v ¯ v T P ¯ v = 2 ¯ λ i , (7) where (3a) is used. As shown above, this mapping holds only when the state x coincides with an eigen vector ¯ v i . This means that this definition is useful only under specific operating conditions of po wer systems, which restricts its applicability . On the other hand, the resulting modal energy is real valued and coincides with the system actual ener gy defined in (5), which is a desirable property . 2) Eigen vector -Based: The mapping between eigenv alue and modal ener gy always holds since ¯ s i e i = x T ¯ v i ¯ u T i Ax 1 2 x T ¯ v i ¯ u T i x = x T ¯ v i ¯ λ i ¯ u T i x 1 2 x T ¯ v i ¯ u T i x = 2 ¯ λ i x T ¯ v i ¯ u T i x x T ¯ v i ¯ u T i x = 2 ¯ λ i , (8) where (3b) is used. The sum of all modal energies equals the total energy X ∀ i ¯ e i = X ∀ i 1 2 x T ¯ v i ¯ u T i x = 1 2 x T X ∀ i ¯ v i ¯ u T i ! x = V ( x ) , (9) where (4) is used. Although the abov e two conditions are satisfied, the modal energy ¯ e i is generally complex-valued, which makes its physical meaning unclear in power systems. 3) Hermitian PF-Based: By a deriv ation similar to (8), the eigenv alue-modal energy mapping also holds. Due to the Hermitian operator , the modal energy is real v alued. Howe ver , the sum of modal energies does not generally equal the total energy , and this equality holds only when X ∀ i e i = X ∀ i 1 2 ¯ z H i P ¯ z i = X ∀ i 1 2 x T ¯ u ∗ i ¯ v H i P ¯ v i ¯ u T i x A ♯ is normal = 1 2 x T X ∀ i | ¯ v i | 2 ¯ u ∗ i P ¯ u T i x = V ( x ) . (10) This condition requires A to satisfy a normality property . When physical energy is considered, this corresponds to AA ♯ = A ♯ A , where A ♯ := P − 1 A T P . For normalized energy , the condition reduces to AA T = A T A . The normality of A sev erely restricts its applicability in power systems. It is possible to sho w that for second-order synchronous generators (SGs), A ♯ is normal only if the network is lossless and machines have no damping. Moreover , matrix A is normal only if all generators are dynamically decoupled, a condition that clearly does not represent an interconnected multi-generator system. This mismatch arises from a missing component, namely the cross ener gy between different modes. Since x = P ∀ i ¯ z i from (6), the total energy can be expressed as V ( x ) = X ∀ i,j 1 2 ¯ z H i P ¯ z j = X ∀ i 1 2 ¯ z H i P ¯ z i | {z } modal energy + X i = j 1 2 ¯ z H i P ¯ z j | {z } missing energy . (11) 4) Conjugate PF-Based: The conclusions are similar to the Hermitian PF-based method, except that the modal energy is complex valued rather than real. I V . C A S E S T U DY A WECC 9-bus system is used for demonstration. T wo scenarios, one with only SGs and the other including in verters, are considered. For both scenarios, we consider the linearized system at a given equilibrium point and then apply a step variations to the variables in order to emulate the ef fect of a short circuit near Bus 7. Then, we assume that the fault is cleared without changing the topology of the system. In this way , we can calculate the trajectory of the state vector x and compare the dynamic beha vior of the modal energies obtained with the four definitions discussed in the pre vious sections. Considering, for sake of example, t = 1 . 5 s after applying the disturbance, for the case with only 2nd-order SGs, the total energy defined in (5) is 1 . 43 , and the corresponding total dissipated power is − 4 . 86 . The modal energy results reported in T able II are consistent with theory . The moving- frame-based method preserves the system actual energy , and its first term of modal power represents the actual dissipated power; ho wev er , the mapping between eigenv alue and modal energy does not exist. The eigenv ector-based method satis- fies the eigen value mapping and energy additivity , but the modal energy can be complex valued. The Hermitian PF- based method preserves eigen v alue mapping and has real- valued energy , but the summed modal ener gy is 1 . 02 , which is smaller than the total energy due to the non-normality of the system. The transpose PF-based method produces complex- valued ener gy , and its sum is 0 . 31 , which deviates significantly from the system actual energy . 3 T ABLE II M O DA L E N E R GY OF W E C C 9 - B U S S Y S TE M Eigen values Moving Frame-Based Eigen vector-Based Hermitian PF-Based T ranspose PF-Based Energy Power Energy Power Energy Power Energy Power − 0 . 73 ± j12 . 17 1 . 43 Activ e: − 4 . 86 ; Reactiv e: 80 . 56 , 27 . 45 , − 8 . 87 , 41 . 24 , 20 . 68 0 . 005 ∓ j0 . 001 0 . 02 ± j0 . 12 2 × 0 . 006 − 0 . 01 ± j0 . 13 0 . 0002 ∓ j0 . 0003 0 . 006 ± j0 . 005 − 0 . 38 ± j7 . 91 0 . 55 ± j0 . 12 − 2 . 30 ± j8 . 56 2 × 0 . 37 − 0 . 29 ± j5 . 78 0 . 02 ∓ j0 . 01 0 . 07 ± j0 . 26 − 0 . 46 0 . 33 − 0 . 30 0 . 28 − 0 . 26 0 . 28 − 0 . 26 0 0 0 0 0 0 0 e = V ( x ) s i = 2 ¯ λ i e P ∀ i ¯ e i = V ( x ) ¯ s i = 2 ¯ λ i ¯ e i P ∀ i e i = V ( x ) ¯ s i = 2 ¯ λ i e i P ∀ i ¯ e i = V ( x ) ¯ s i = 2 ¯ λ i ¯ e i Fig. 1. Dynamics of (a) stored energy and (b) dissipated power . Energy and power trajectories are shown in Fig. 1 assuming that the disturbance on the states is applied at t = 1 s. As expected, for the moving-frame-based method, the modal energy equals the actual energy . For the eigen vector-based method, both the energy sum and power sum match the total energy and power . For the Hermitian PF-based and transpose PF-based methods, the summed modal energy is lower than the total energy , and the summed modal power deviates significantly from the actual v alue. In particular , e ven the sign of the power , which indicates stability (negati ve) or instability (positiv e) as discussed in [6], may be incorrect. This leads to an incorrect assessment of power system stability . The Hermitian PF-based method is further examined by including exciters and DFIG wind generators. For visualiza- tion, system normality is quantified using the following index, where a v alue of 1 indicates perfect normality: Normalit y ( A ) = 1 1 + ∥ A ♯ A − AA ♯ ∥ F / ∥ A ∥ 2 F , (12) where ∥·∥ F denotes the Frobenius norm. T able III shows the system normality and energy calculated again at t = 1 . 5 s after the contingency . For comparison, the system with no damping and a lossless network has perfect normality as prov ed in Section III, and the error in the summed modal energy is zero. With regular SGs, a normality value of 0 . 74 leads to a 29% error in energy . If the exciter or the DFIG T ABLE III H E RM IT I A N PF - B A SE D M E TH OD R E G AR D I N G S U M M ED E N E RG Y System No-damping SG and Lossless Network 2nd-order SG SG with Exciter ∗ DFIG ∗ Normality( A ) 1 0 . 74 0 . 63 0 . 58 Energy Actual 1 . 93 1 . 43 233 304 Summed Modal 1 . 93 1 . 02 1094 2872 Error (%) 0 29 369 845 * Normalized energy is used since it is difficult to define P here. wind generator is included, system normality decreases due to increased model complexity , and the energy error increases significantly . Thus Hermitian PF-based method has limited applicability in realistic models of power systems. V . C O N C L U S I O N S This letter clarifies the definitions and applicability of main- stream modal energy approaches in power system analysis, including the moving frame–based, eigen vector–based, Hermi- tian PF–based, and transpose PF–based methods, and re veals their limitations in complex and in verter -dominated power systems. The moving frame–based method lacks a mapping between modal energy and eigen value. The eigen vector–based method yields complex-v alued modal energy , which contra- dicts physical energy definitions. PF-based methods fail to preserve energy additivity , which holds only when the state matrix is normal. R E F E R E N C E S [1] M. J. Gibbard, P . Pourbeik, and D. J. V owles, Small-Signal Stability , Contr ol and Dynamic P erformance of P ower Systems . Adelaide: Univ ersity of Adelaide Press, 2015. [2] F . Milano, I. Dassios, M. Liu, and G. Tzounas, Eigenvalue Pr oblems in P ower Systems . Boca Raton: CRC Press, 2021. [3] A. G. J. MacFarlane, “Use of power and energy concepts in the analysis of multiv ariable feedback controllers, ” Pr oc. Inst. Electr . Eng. , vol. 116, no. 8, pp. 1449–1452, 1969. [4] A. M. A. Hamdan, “Coupling measures between modes and state vari- ables in power -system dynamics, ” Int. J. Control , vol. 43, no. 3, pp. 1029–1041, 1986. [5] A. B. Iskako v , “Definition of state-in-mode participation factors for modal analysis of linear systems, ” IEEE T rans. A utom. Contr ol , vol. 66, no. 11, pp. 5385–5392, 2021. [6] L. Chen, Y . Min, Y .-P . Chen, and W . Hu, “Ev aluation of generator damping using oscillation energy dissipation and the connection with modal analysis, ” IEEE T rans. P ower Syst. , v ol. 29, no. 3, pp. 1393–1402, 2014. [7] Y . Hu, S. Bu, S. Y i, J. Zhu, J. Luo, and Y . W ei, “ A novel energy flow analysis and its connection with modal analysis for inv estigating electromechanical oscillations in multi-machine power systems, ” IEEE T rans. P ower Syst. , vol. 37, no. 2, pp. 1139–1150, 2022. [8] H. Silva-Saravia, Y . W ang, H. Pulgar-Painemal, and K. T omsovic, “Os- cillation energy based sensitivity analysis and control for multi-mode oscillation systems, ” in PES General Meeting , 2018, pp. 1–5. [9] K. Chatterjee and N. R. Chaudhuri, “On the equality of modal damping power and the a verage rate of transient energy dissipation in a multima- chine power system, ” IEEE Control Syst. Lett. , vol. 6, pp. 1531–1536, 2022.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment