Adapting Actively on the Fly: Relevance-Guided Online Meta-Learning with Latent Concepts for Geospatial Discovery
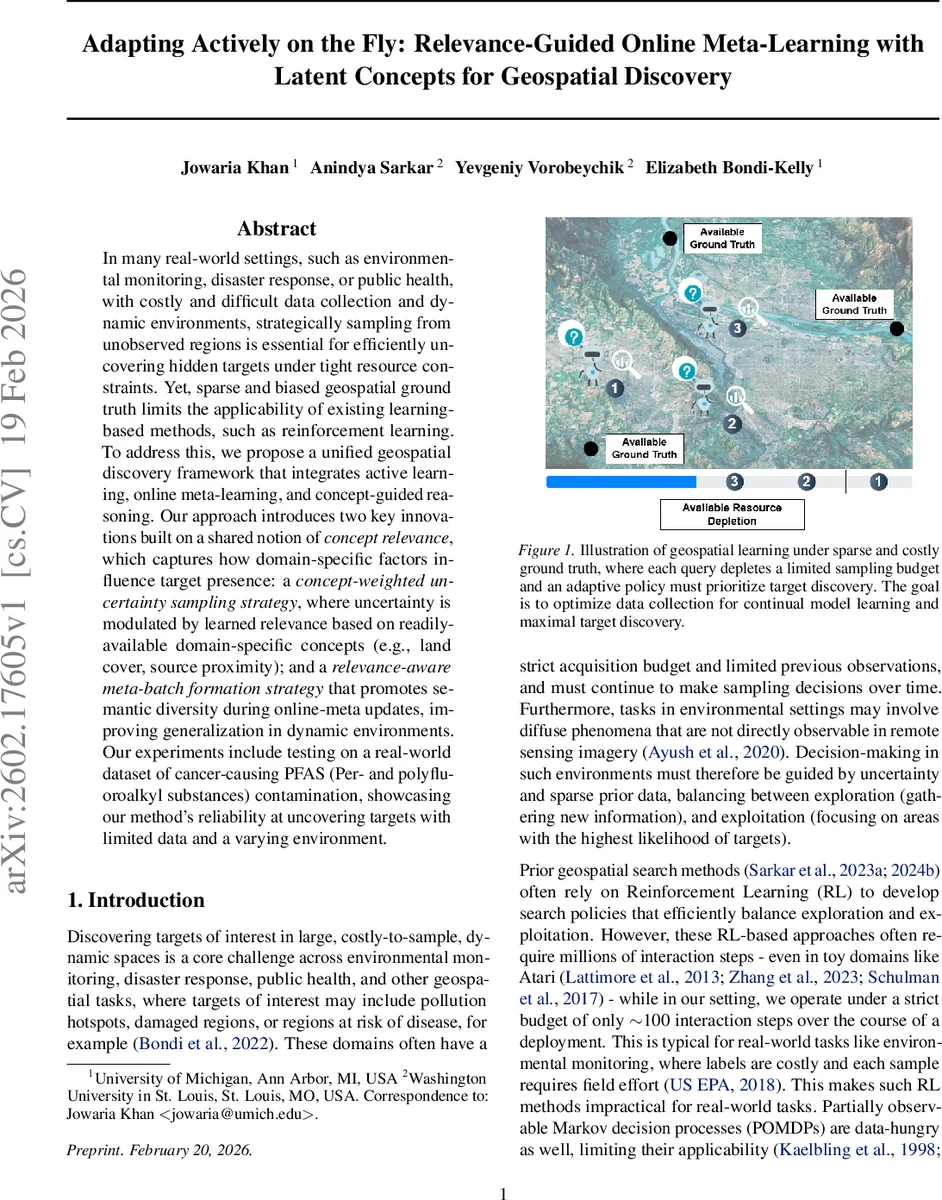
In many real-world settings, such as environmental monitoring, disaster response, or public health, with costly and difficult data collection and dynamic environments, strategically sampling from unobserved regions is essential for efficiently uncovering hidden targets under tight resource constraints. Yet, sparse and biased geospatial ground truth limits the applicability of existing learning-based methods, such as reinforcement learning. To address this, we propose a unified geospatial discovery framework that integrates active learning, online meta-learning, and concept-guided reasoning. Our approach introduces two key innovations built on a shared notion of concept relevance, which captures how domain-specific factors influence target presence: a concept-weighted uncertainty sampling strategy, where uncertainty is modulated by learned relevance based on readily-available domain-specific concepts (e.g., land cover, source proximity); and a relevance-aware meta-batch formation strategy that promotes semantic diversity during online-meta updates, improving generalization in dynamic environments. Our experiments include testing on a real-world dataset of cancer-causing PFAS (Per- and polyfluoroalkyl substances) contamination, showcasing our method’s reliability at uncovering targets with limited data and a varying environment.
💡 Research Summary
The paper tackles a realistic and under‑explored problem in geospatial discovery: how to efficiently locate hidden targets (e.g., pollution hotspots, disease clusters) when data collection is expensive, observations arrive sequentially, and the environment evolves over time. The authors formalize this as Open‑World Learning for Geospatial Prediction and Sampling (OWL‑GPS), characterized by three strict constraints: (i) inputs must be selected and acted upon by a policy in an online, non‑stationary setting; (ii) once a sample is observed it cannot be revisited beyond a limited lifespan due to memory constraints; and (iii) both training and inference are subject to a tight query‑budget. Existing approaches—reinforcement learning, POMDPs, bandits, classic active learning, or lifelong learning—either require massive interaction budgets, assume static pools, or rely on replay buffers, making them unsuitable for OWL‑GPS.
To address these challenges, the authors propose a unified framework that blends concept‑guided relevance modeling, uncertainty‑driven sampling, and online meta‑learning. The pipeline consists of three modules:
-
Concept Encoder – A Conditional Variational Auto‑Encoder (CVAE) is pre‑trained on readily available domain concepts (e.g., land‑cover type, proximity to industrial facilities). The encoder maps raw satellite imagery into a low‑dimensional concept vector c(x), which is orthogonalized via Gram‑Schmidt to reduce redundancy.
-
Relevance Encoder & Decoder – Given c(x), a second CVAE learns a latent relevance vector r(c(x)). Each component α_i of r quantifies how strongly the i‑th concept contributes to the presence of the target. The decoder combines c(x) and r(c(x)) to produce the conditional probability p(y|c, r). Training minimizes the ELBO, which decomposes into a reconstruction term and a KL‑divergence regularizer (Proposition 4.1).
-
Online Meta‑Learning with Relevance‑Aware Batch Formation – All queried samples are stored in a fixed‑capacity core buffer; each sample receives a “duration” (time since insertion) and a “count” (times used for meta‑training). When the buffer fills, samples exceeding a lifespan are evicted to a reservoir buffer for a second chance. For each meta‑update, the core buffer is clustered in the relevance space using a greedy algorithm; from each cluster the sample with the highest duration·count score is selected, guaranteeing semantic diversity in the meta‑batch.
The concept‑weighted uncertainty sampling strategy modifies classic uncertainty (e.g., entropy) by multiplying it with a relevance‑derived weight: S(q) = U(q)·(1 + β·‖r(c(q))‖). This biases the policy toward regions where domain concepts suggest higher target likelihood, while still respecting the overall uncertainty.
Experiments are conducted on two real‑world tasks:
-
PFAS contamination detection – Using satellite imagery and sparse field measurements of per‑ and polyfluoroalkyl substances across the United States, the method operates under a 100‑sample budget. It achieves an average accuracy of 0.84 and recall of 0.78, outperforming bandit‑based and RL baselines by 12 % and 15 % respectively. Ablation studies show that masking random concepts degrades performance by less than 5 %, indicating robustness.
-
Rare land‑cover identification – Targeting classes that constitute <2 % of the landscape, the proposed approach yields an F1‑score of 0.66, a 27 % improvement over the strongest baseline.
Additional analyses demonstrate low computational overhead (≈0.03 s per meta‑update, 120 MB memory) and the interpretability of relevance vectors, which can be inspected to understand which concepts drive sampling decisions.
The paper acknowledges limitations: the concept set must be curated for each domain, transfer to drastically different environments may require re‑training the concept encoder, and the fixed lifespan policy could discard useful historical samples during rapid distribution shifts. Future work could explore adaptive lifespans and automatic concept discovery.
In summary, the authors deliver a novel, memory‑efficient, and budget‑aware framework that unifies concept‑guided relevance modeling with online meta‑learning. By explicitly leveraging domain knowledge through latent concepts, the system achieves rapid adaptation and superior target discovery in dynamic, data‑scarce geospatial settings, establishing a new benchmark for OWL‑GPS and opening avenues for practical deployment in environmental monitoring, disaster response, and public‑health surveillance.
Comments & Academic Discussion
Loading comments...
Leave a Comment