Noncooperative Coordination for Decentralized Air Traffic Management
Decentralized air traffic management requires coordination among self-interested stakeholders operating under shared safety and capacity constraints, where conventional centralized or implicitly cooperative models do not adequately capture this setti…
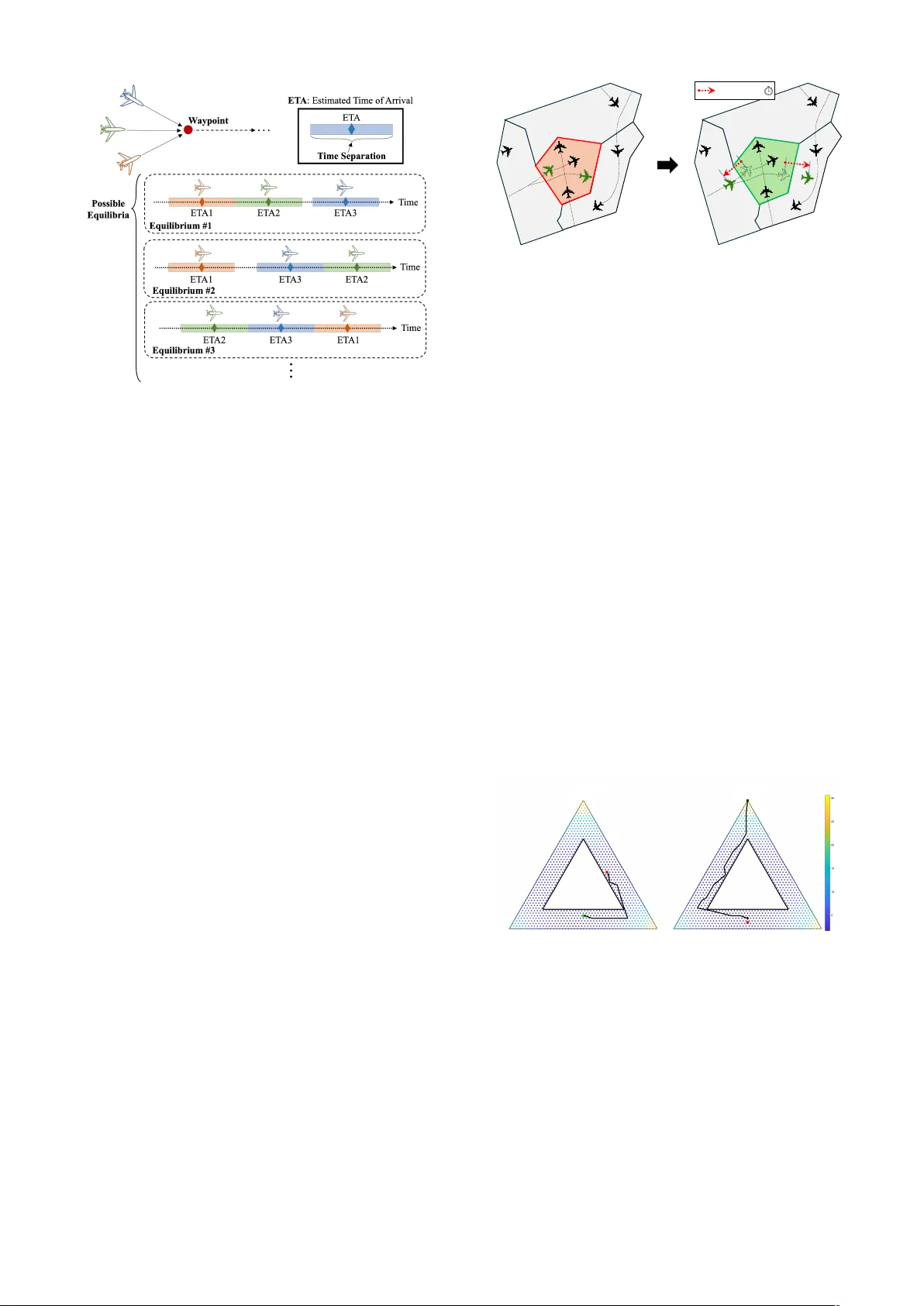
Authors: Jaehan Im
Second US-Europe Air T ransportation Research and Dev elopment Symposium (A TRDS2026) Noncooperati v e Coordination for Decentralized Air T raf fic Management Jaehan Im Department of Aerospace Engineering The Univ ersity of T exas at Austin Austin, T exas, USA jaehan.im@utexas.edu Abstract —Decentralized air traffic management requires coor- dination among self-interested stak eholders operating under shared safety and capacity constraints, where con ventional centralized or implicitly cooperative models do not adequately capture this setting. W e develop a unified perspectiv e on nonco- operative coordination, in which system-lev el outcomes emerge by designing incentives and assigning signals that reshape indi- vidual optimality rather than imposing cooperation or enforce- ment. W e advance this framework along three directions: scal- able equilibrium engineering via reduced-rank and uncertainty- aware correlated equilibria, decentralized mechanism design for equilibrium selection without enfor cement, and structured noncooperative dynamics with con vergence guarantees. Beyond these technical contributions, we discuss core design principles that gover n incentive-compatible coordination in decentralized systems. T ogether , these results establish a foundation f or scal- able, robust coordination in safety-critical air traffic systems. Keyw ords —noncooperative coordination; decentralized air traffic management; game theory; incentive compatibility; mech- anism design I . I NT R O D U C T I O N Air traffic management (A TM) has traditionally relied on centralized coordination, where a single authority enforces globally ef ficient decisions [1]–[4]. Howe ver , centralized ar- chitectures increasingly face structural limitations: Rising traffic density introduces scalability challenges [2], [3], which are further amplified in emerging traffic paradigms such as ur- ban air mobility [4]. Moreov er , centralized systems may lack the flexibility and resilience required to adapt to disruptions and rapidly ev olving operational environments [5], [6]. These limitations have motiv ated the development of de- centralized A TM concepts, in which decision-making author- ity is distributed among multiple stakeholders [2], [7], [8]. In such settings, airlines, sectors, and re gional authorities operate with local objectiv es, priv ate cost structures, and limited willingness to share sensitiv e operational information. Consequently , system-lev el performance is no longer dictated by centralized optimization, b ut instead emerges from strate- gic interactions among stakeholders. A substantial body of research has in vestigated decen- tralized A TM architectures from multiple perspectives. Early efforts in distributed air/ground traffic management proposed redistributing decision authority from centralized control cen- ters to aircraft operators and ground systems [7]–[9]. Subse- quent work explored decentralized air traffic flow manage- ment methods based on distrib uted optimization and multi- agent coordination [9]–[12]. In parallel, research in urban traffic management and lo w-altitude advanced air mobility management adopted partially decentralized architectures in- volving multiple service providers [2], [11], [13]–[15]. More recently , U AM-oriented A TM architectures hav e emphasized hierarchical structures to address resilience requirements in emerging urban airspace systems [2], [15]. Much of the existing literature on conflict resolution and flow management, howe ver , assumes cooperative behavior or central enforcement with explicitly noncooperative formu- lations appearing only in limited cases [12], [16]. At the same time, recent work recognizes that, in the absence of a central authority , competition over shared resources must ultimately be resolved through negotiation- or incenti ve-based mechanisms, yet clear and widely adopted strategic protocols remain lacking [13], [16]. These observations suggest the ex- plicit modeling of stakeholder interaction as a noncooperative interaction remains comparatively underexplored. Therefore, decentralized A TM should be modeled as a noncooperativ e multi-agent system in which stakeholders pursue individual objectiv es while operating under shared safety and capacity constraints. W e propose a research topic that in vestigates the following central question: “ How can coordination emerge in decentralized air traffic systems among self-interested, noncooperati ve stakeholders without relying on a central authority? ” W e address this question through a unified perspective on noncooperativ e coordination via incentiv e design. First, we revie w three interconnected research directions: scalable equi- librium engineering, decentralized mechanism design with con vergence guarantee, and structured noncooperative dynam- ics with system performance guarantees, including dynamic incentiv e control for lar ge-scale air traffic systems. Beyond these technical contributions, we discuss the underlying de- sign principles that enable noncooperati ve coordination to emerge in decentralized A TM settings. I I . R ES E A R C H P RO G R A M : N O N C O O P E R A T I V E C O O R D I NAT IO N W e propose three interconnected research areas that has been in vestigated to enable noncooperativ e coordination in decentralized air traffic management (A TM). A. Equilibrium engineering and scalable computation Equilibrium concepts model ho w self-interested agents interact in decentralized systems. Uncoordinated strategic behavior typically con verges to Nash equilibrium, which often yields inefficient and unfair outcomes. Correlated equilibrium expands the achiev able outcome space by allowing a coordinator to send signals that align individual incentiv es with system-lev el objectiv es. Rather than predicting behavior , we treat equilibrium as a design variable: the coordinator constructs a distribution over joint actions such that no stakeholder benefits from unilateral deviation. Definition 1 (Correlated equilibrium) . Consider a finite game with action sets A i and utilities u i . A distribution z ∈ ∆( A ) over joint actions A = Q i A i is a corr elated equilibrium if P a − i z ( a i , a − i ) u i ( a i , a − i ) − u i ( a ′ i , a − i ) ≥ 0 , (1) for every player i and any actions a i , a ′ i ∈ A i . While correlated equilibrium enables efficient coordina- tion without centralized enforcement, its direct computation scales exponentially with the number of agents and actions. T o address this limitation, we developed the Reduced-Rank Correlated Equilibrium (RRCE) method. 1) Reduced-rank correlated equilibria [17]: RRCE ap- proximates the correlated equilibrium set by restricting co- ordination to the con ve x hull of a finite collection of pre- computed Nash equilibria. Instead of enumerating all m n joint actions in an n -player m -action game, the method operates in a low-dimensional subspace spanned by selected equilibria, dramatically reducing computational complexity . W e ev aluate RRCE in decentralized runway allocation and virtual queue coordination scenarios, illustrated in Figure 1, where airlines act as self-interested agents competing for shared departure capacity . Numerical experiments show that RRCE achie ves near-centralized performance while preserv- ing autonomy and incenti ve compatibility . Compared to Nash equilibrium outcomes, RRCE significantly reduces accumu- lated delay and improv es fairness across airlines, while main- taining scalability to large action spaces that are otherwise intractable for direct correlated equilibrium computation. 2) Uncertainty-aware corr elated coor dination: In realistic A TM settings, stakeholders’ cost functions are uncertain and priv ately observed. If coordination is designed using nominal utilities, profitable deviations may arise once realized costs differ from the coordinator’ s estimate. T o address this issue, we extend correlated equilibrium to a probabilistic setting and introduce a chance-constrained correlated equilibrium formulation that explicitly accounts for payoff uncertainty . Definition 2 (Chance-constrained correlated equilibrium) . Assume utilities are subject to stochastic perturbations, u i = ¯ u i + η i , wher e η i ∼ N (0 , σ 2 i ) . A distribution z ∈ ∆( A ) is Figure 1. Decentralized runway allocation scenario. Multiple airline- specific departure queues compete for limited runway capacity . Each airline selects pushback or runway assignment actions based on its own delay cost, while a coordinator broadcasts correlated signals to impro ve system-le vel ef ficiency . The resulting game models noncooperativ e competition over shared departure resources. a chance-constr ained corr elated equilibrium with confidence level α ∈ [0 , 1] if, for every player i and any actions a i , a ′ i ∈ A i , P P a − i z ( a i , a − i ) u i ( a i , a − i ) − u i ( a ′ i , a − i ) ≥ 0 ≥ α. (2) The confidence level α introduces an explicit robust- ness–efficienc y trade-off: larger α reduces deviation risk but restricts the feasible coordination set. In collaborative virtual queue coordination experiments with uncertain airline delay costs, the proposed mechanism reduces accumulated delay relativ e to first-come-first-served baselines while significantly limiting realized deviations. B. Mechanism design for noncooperative coordination While correlated signaling aligns actions through central- ized coordination, achie ving consensus in a fully decentral- ized setting remains a fundamental challenge. For example, when multiple feasible equilibria exist, self-interested agents may fail to coordinate on a common outcome without an explicit decentralized mechanism. 1) T rading-based equilibrium selection (T ACo) [18]: T o achiev e decentralized consensus without centralized authority , we dev eloped the T rading Auction for Consensus (T A Co). T ACo formulates equilibrium selection as a trading-asset allocation problem. Agents exchange transferable secondary assets (e.g., credits) to reconcile conflicting preferences. Rather than enforcing a particular outcome, T A Co reshapes incentiv es so that a mutually preferred equilibrium becomes individually rational. The mechanism operates through broad- cast communication, requires no direct pairwise negotiation, and preserves pri vate v aluation information. W e establish three properties: 1) Finite-time conv ergence to a consensus equilibrium, 2) Preserv ation of priv ate valuation information, 3) Incenti ve compatibility under self-interested behavior . In decentralized arri val sequencing and coordination games, illustrated in Figure 2, T A Co selects socially efficient and fair equilibria while ensuring stakeholders’ incentive compatibility , compared to randomized equilibrium selection or voting-based schemes. 2 Figure 2. Equilibrium selection in decentralized arrival sequencing. Different arriv al orderings satisfy time-separation constraints, creat- ing multiple feasible equilibria with conflicting airline preferences. T rading auction for Consensus (T A Co) enables incenti ve-compatible selection without centralized enforcement. 2) Iterative ne gotiation with oversight [19]: While T A Co enables decentralized consensus, safety-critical A TM appli- cations require explicit system-lev el guarantees. W e therefore dev eloped an iterativ e negotiation frame work with lightweight regulatory oversight. Agents iterati vely update strategies through local nego- tiation, while an authority adjusts a taxation parameter κ based on reserve shortfalls. Rather than enforcing actions, ov ersight reshapes incentives, steering the system tow ard feasible equilibria without overriding decentralized decision- making. W e prove finite-round termination and derive bounds linking intervention le vel, κ ∈ [0 , 1] , to both con vergence speed and efficiency gap, thereby quantifying the auton- omy–performance trade-off. W e demonstrate the framework on a decentralized formula- tion of the collaborative trajectory options pr ogram (CT OP), where multiple airspace managers independently generate trajectory candidates under shared constraints. Experiments show that increasing κ strengthens coordination, improves system ef ficiency and fairness, and approaches centralized performance at the cost of additional negotiation rounds. This framew ork formalizes a middle ground between full decen- tralization and centralized control: agents retain autonomy , while limited intervention ensures system-level guarantees. C. Noncooperative dynamics and equilibrium steering Static equilibrium concepts alone do not guarantee de- sirable system-level outcomes in decentralized A TM. Even when equilibria exist, decentralized best-response updates may con ver ge to inefficient or congested configurations. T o address this, we explicitly analyze noncooperativ e dynamics induced by best-response behavior . 1) Noncooperative dynamics in congestion mitigation [20]: W e study decentralized sector ov erload mitigation, where multiple congested sectors independently adjust flight Flight Schedule Adjustment Δ 𝒕 Δ 𝒕 Figure 3. Decentralized sector overload mitigation through schedule adjustment. Left: a sector experiences congestion due to overlapping flight trajectories. Right: decentralized schedule shifts ( ∆ t ) redis- tribute traf fic temporally , alleviating ov erload without centralized enforcement. departure times to reduce overload. Each sector acts as a self- interested agent and updates decisions through best-response dynamics (BRD). Let L i ( x ) denote the overload in sector i under joint schedule profile x , defined as the excess demand abov e sector capacity . Each sector minimizes J i ( x ) = L i ( x ) + κ P j = i L j ( x ) , (3) where κ ∈ [0 , 1] is a cooperativ eness parameter . When κ = 0 , sectors minimize only their own overload; when κ = 1 , they fully internalize system-wide congestion. W e prov e that the induced game admits potential or ordinal potential structure and that BRD con verges to a pure Nash equilibrium in finite time under mild conditions. Although full cooperation ensures o verload elimination, it is not required. Monte Carlo simulations using 24-hour European flight data show that ev en a very small posi- tiv e κ —preserving self-prioritization—substantially reduces system overload while maintaining decentralized autonomy . Thus, limited cooperation suffices to achiev e robust and high- quality decentralized coordination. State T rajectory Plot 𝒙 𝟏 𝒙 𝟐 𝒙 𝟑 𝒙 𝟏 𝒙 𝟐 𝒙 𝟑 Figure 4. Equilibrium steering in a congestion game. The simplex represents the joint strategy space, and the inner white triangle denotes a non-con vex feasibility constraint. From an initial state (green), dynamic incentiv e signals guide the best-response trajectory tow ard a desired equilibrium (red) while maintaining feasibility . 2) Dynamic incentive design for equilibrium steering: When decentralized dynamics con verge to inef ficient equi- libria, structural analysis alone is insuf ficient. W e therefore study dynamic incentiv e design for equilibrium steering. W e model the induced system as x t +1 = BR( x t ; u t ) , where u t denotes bounded incentive signals added to agents’ cost 3 functions. The objectiv e is to steer the equilibrium trajectory tow ard a desirable region while maintaining feasibility (i.e., x t ∈ X safe , u t ∈ U bounded ). This formulation treats incenti ve design as a predictiv e control problem ov er equilibrium dynamics. Key questions include equilibrium reachability under bounded intervention, minimal incentiv e magnitude required to shift equilibrium basins, and safety preservation during transient ev olution. In a congestion game moti vated by AAM traffic allocation, illustrated in Figure 4, we demonstrate through a toy example that optimal incenti ve sequences can steer best-response tra- jectories toward target equilibria while respecting nonlinear feasibility constraints. These preliminary results suggest that dynamic, safety-aw are incenti ve planning can expand the set of achiev able equilibria beyond static mechanism design. I I I . D ES I G N P R I N C I P L E S F O R D E C E N T R A L I Z E D A T M C O O R D I NAT I O N Across the proposed research directions, several recurring principles guide the design of decentralized air traffic man- agement (A TM) coordination mechanisms. a) Incentive compatibility: W e cannot assume that stakeholders to follo w imposed instructions. Coordination must therefore be individually rational . Correlated equi- librium constructs incenti ve-compatible signals [17], T A Co resolves preference conflicts without enforcement [18], and chance-constrained formulations preserve incentiv e compati- bility under cost uncertainty . b) Con ver gence guarantees: Safety-critical operations require predictable behavior . Potential game structures en- sure finite-time conv ergence of best-response dynamics to pure Nash equilibria [20]. Oversight-based negotiation further guarantees termination and bounded performance degrada- tion, prev enting oscillatory or unstable dynamics [19]. c) Authority-autonomy trade-of f: Full decentralization may reduce efficiency , while full centralization limits scala- bility and stakeholder autonomy . Parameterized models, such as the cooperativeness factor κ [20] and taxation-based over - sight [19], quantify intermediate regimes in which calibrated intervention improves system performance while balancing individual decision authority . d) Robustness-ef ficiency trade-of f: Priv ate and uncertain costs necessitate robustness guarantees. Confidence param- eters in chance-constrained correlated equilibria explicitly trade of f deviation risk against achiev able efficienc y , making robustness a tunable design variable. e) Scalability: A TM coordination scales combinatorially with traffic density [17], [18], [20]. Reduced-rank correlated equilibria restrict coordination to low-dimensional subspaces spanned by multiple Nash equilibria, enabling tractable com- putation in large action spaces [17]. f) Privacy and fairness: Stakeholders are unwilling to disclose sensitiv e cost information. Auction-based and equilibrium-based mechanisms preserve pri vate v aluations [18], [19] while improving fairness relati ve to uncoordinated outcomes [17]–[19]. I V . C O N C L U S I O N W e establish a unified vie w of decentralized air traf fic management as a noncooperati ve system whose equilibria can be engineered, selected, and steered through incenti ve design. Overall, the proposed dissertation demonstrates that effecti ve coordination in decentralized air traffic systems does not require centralized enforcement. Instead, by align- ing incentives, shaping equilibrium structure, and le veraging calibrated intervention, system-le vel performance can emerge from individually rational decision-making. R E F E R E N C E S [1] J. Poh, N. G. Leveson, and N. A. Neogi, “ A safety-driven approach to exploring and comparing air traffic management concepts for enabling urban air mobility , ” in Int. Conf. Res. Air T ransp. (ICRAT) , 2024. [2] S. Bharadwaj, S. Carr , N. Neogi, and U. T opcu, “Decentralized control synthesis for air traffic management in urban air mobility , ” IEEE T rans. Contr ol Netw . Syst. , vol. 8, no. 2, pp. 598–608, 2021. [3] R. A. Paielli, “Evaluation of tactical conflict resolution algorithms for enroute airspace, ” J. Aircr . , vol. 48, no. 1, pp. 324–330, 2011. [4] B. T . Baxley , D. Williams, M. Consiglio, C. Adams, and T . Abbott, “Small aircraft transportation system, higher volume operations concept and research summary , ” J. Aircr . , vol. 45, no. 6, pp. 1825–1834, 2008. [5] Z. He, Z. W ang, and L. Li, “Urban air mobility: A review of recent advances in communication, management, and sustainability , ” in Int. Conf. Cyber-Phys. Soc. Intell. (CPSI) . IEEE, 2025, pp. 1–6. [6] B. Mirkovic, D. Timotic Petko vic, F . Netjasov , D. Crnogorac, C. E. V erdonk Gallego, C. Xia, and S. Malakis, “ A data-dri ven approach to resilience in air traffic management: case study barcelona area control centre, ” Cogn. T echnol. W ork , vol. 26, no. 3, pp. 457–485, 2024. [7] M. Adams, S. Kolitz, and A. Adani, “Evolutionary concepts for decentralized air traffic flow management, ” in Guid. Navig. Contr ol Conf. , 1997, p. 3857. [8] S. Green, K. Bilimoria, and M. Ballin, “Distributed air-ground traffic management for en route flight operations, ” in AIAA Guid. Navig. Contr ol Conf. Exhib . , 2001, p. 4064. [9] M. Ballin, J. Hoekstra, D. W ing, and G. Lohr, “Nasa langley and nlr research of distributed air/ground traf fic management, ” in AIAA Air cr . T echnol. Inte gr . Oper . (ATIO) T ech. F orum , 2002, p. 5826. [10] J. Im and J. Ahn, “Decentralized free-flow traffic management based on nash equilibrium, ” J. Aerosp. Inf. Syst. , vol. 20, no. 4, pp. 195–203, 2023. [11] T . Duong, K. K. T odi, U. Chaudhary , and H.-L. Truong, “Decentraliz- ing air traf fic flow management with blockchain-based reinforcement learning, ” in IEEE Int. Conf. Ind. Inf. (INDIN) , vol. 1. IEEE, 2019, pp. 1795–1800. [12] C. T omlin, G. J. Pappas, and S. Sastry , “Noncooperativ e conflict res- olution [air traffic management], ” in Pr oc. IEEE Conf. Decis. Control , vol. 2. IEEE, 1997, pp. 1816–1821. [13] A. D. Evans, M. Egorov , and S. Munn, “Fairness in decentralized strategic deconfliction in utm, ” in AIAA Scitech F orum , 2020, p. 2203. [14] P . Kopardekar , J. Rios, T . Prevot, M. Johnson, J. Jung, and J. E. Robin- son, “Unmanned aircraft system traf fic management (utm) concept of operations, ” in AIAA A viat. F orum Expo. , no. ARC-E-DAA-TN32838, 2016. [15] J. Poh, N. G. Leveson, and N. A. Neogi, “ A safety-driven approach to exploring and comparing air traffic management concepts for enabling urban air mobility , ” in Int. Conf. Res. Air T ransp. (ICRAT) , 2024. [16] K. Barker , S. Lakshmi varahan, N. Ghorbani-Renani, A. Rangrazjeddi, A. D. Gonz ´ alez, R. W ood, and J. Demagalski, “Hf002: Applied game theory to enhance air traffic control training. ” [17] J. Im, Y . Y u, D. Fridovich-Keil, and U. T opcu, “Coordination in noncooperativ e multiplayer matrix games via reduced rank correlated equilibria, ” IEEE Contr ol Syst. Lett. , vol. 8, pp. 1637–1642, 2024. [18] J. Im, F . Fotiadis, D. Delahaye, U. T opcu, and D. Fridovich-Keil, “Noncooperativ e consensus via a trading-based auction, ” arXiv preprint arXiv:2502.03616 , 2025. [19] J. Im, J.-P . Clarke, U. T opcu, and D. Fridovich-Keil, “Iterati ve ne- gotiation and oversight: A case study in decentralized air traffic management, ” arXiv preprint , 2025. [20] J. Im, D. Delahaye, D. Fridovich-Keil, and U. T opcu, “Game-theoretic decentralized coordination for airspace sector ov erload mitigation, ” arXiv pr eprint arXiv:2511.13770 , 2025. 4
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment