State Feedback Control of State-Delayed LPV Systems using Dynamics IQCs
This paper develops a new control framework for linear parameter-varying (LPV) systems with time-varying state delays by integrating parameter-dependent Lyapunov functions with integral quadratic constraints (IQCs). A novel delay-dependent state-feed…
Authors: Fen Wu
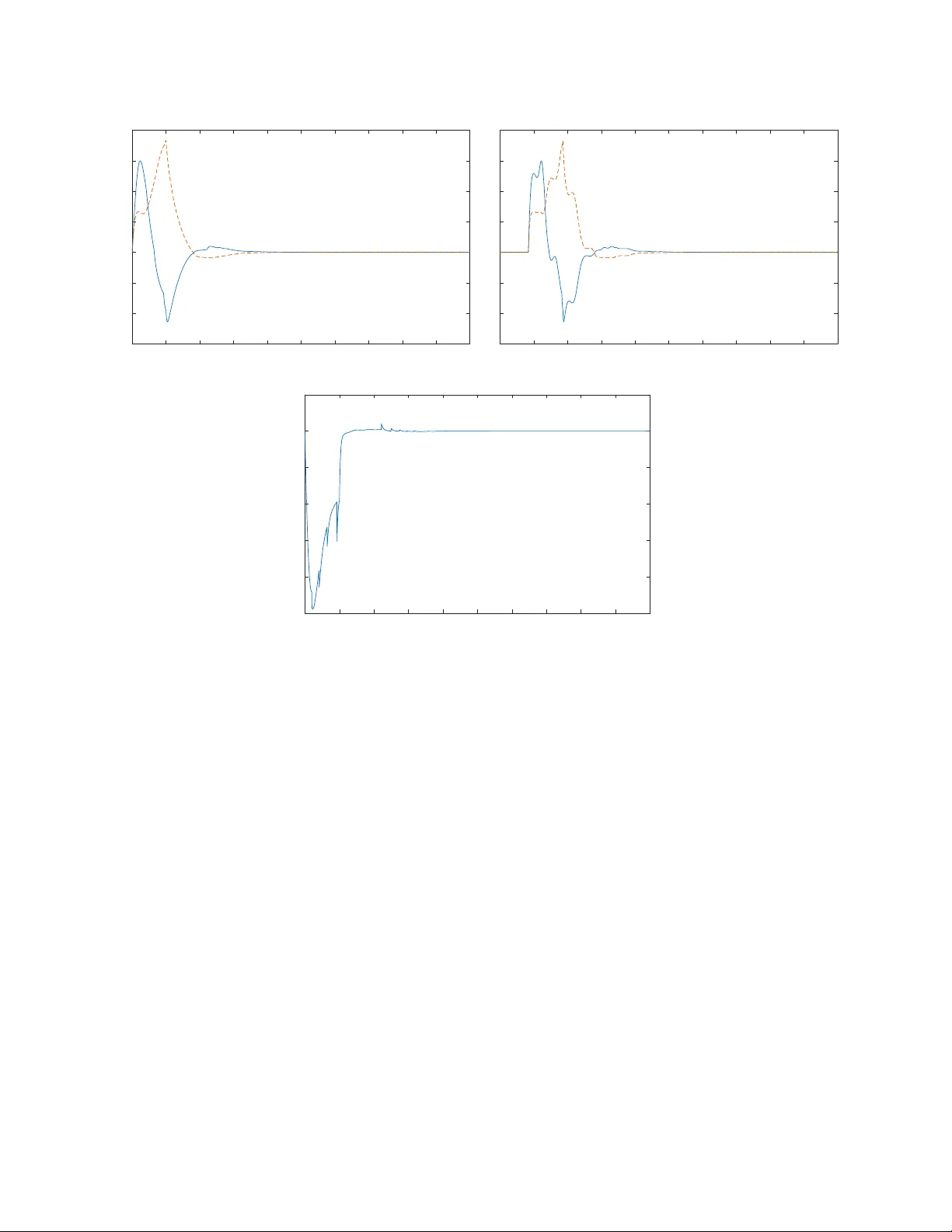
State F eedbac k Con trol of State-De la y ed LPV Syst ems using Dynamics IQCs F e n W u ∗ Departmen t of Mec hanical and Aerospace Engineering North Carolina Stat e Univ ersit y Raleigh, NC 27695 , USA Abstract This paper dev elops a new con trol framew ork for linear parameter-v a rying (LPV) systems with time- v arying state delays by integrating parameter -dep endent Ly apunov functions with int egral quadratic constraints (IQCs). A nov el delay-dependent state-feedback controller struc- ture is prop osed, consisting of a linea r state-feedback law augmented with an additional term that captures the dela y-dependent dynamics of the plant. Closed-lo op s tability and L 2 -gain p er- formance ar e analyz ed using dynamic IQCs and parameter -dep endent quadratic Ly apunov func- tions, leading to co nv ex synthesis conditions that guar antee p e rformance in ter ms of parameter - depe ndent linear matr ix inequalities (LMIs). Unlik e traditional delay co nt rol approa ches, the prop osed IQ C-based fra mework provides a fle x ible and systematic methodo logy for handling delay effects, enabling enhanced co ntrol capability , reduced conserv atism, and imp rov ed closed- lo op performa nce . Keyw ords: linear parameter-v arying (LPV) systems; time-v arying state d ela y; int egral quadr atic constrain ts (IQCs); linear matrix inequalities (LMIs). 1 In tro duction Time-dela y systems ha v e receiv ed considerable atten tion o v er the past decades due to their widespread presence in practical engineering applications, in clud ing indu strial man ufacturing pr o cesses [15], neural net w orks [14, 27, 12], and fuzzy dynamical systems [20, 6, 34]. Th e presence of dela ys often induces ins tability and p erf orm ance degradation, whic h h as motiv ated the dev elopmen t of v arious to ols for stabilit y analysis and cont roller design [9, 7, 3]. Early researc h pr imarily focused on systems with constan t dela ys, and the theory for stabilit y and stabilizatio n of linear time-inv ariant (L TI) systems w ith constant dela ys is no w well established [18, 13]. More recen tly , time-v arying delays h a v e attracte d increasing atte n tion, as t hey naturally arise in large-scale complex systems suc h as net w ork ed control systems [15, 14, 27 , 12] and un derwat er v ehicles [16]. Th is has led to exte nsive inv estigations on the analysis a nd syn thesis of systems with time-v arying d ela ys [7, 19, 10, 4], includin g the deve lopmen t of v arious stabilit y and p erformance criteria [19]. A common approac h in these studies is the construction of Lya punov-Kraso vskii ∗ Email: fwu@ncsu. edu , Phone: (919) 515-5268 1 functionals (LKFs) to obtain dela y-dep endent analysis results. Although more sophistica ted LKFs often r ed uce conserv atism, identifying the precise sour ces of conserv atism remains challenging, as do es d esigning fu nctionals that ac hieve a desirable balance b et w een accuracy and computational efficiency . A f u rther difficult y asso ciated with LKF-based approac hes arises in con trol synthesis. Most syn the- sis conditions derive d fr om LKFs are inherently non-con v ex, frequently taking the form of bilinear matrix inequalities (BMIs) d ue to the coupling b et ween Lyapuno v and con troller d ecision ma- trices [7, 3, 4]. T o obtain computationally tractable cond itions, auxiliary v ariables or structural constrain ts are typicall y introd uced, which inevitably in tro duce additional conserv atism. Conse- quen tly , a p ersistent gap exists b et ween analysis and syn thesis results, explaining why synthesis conditions are often more conserv ativ e despite the ric h b od y of analysis resu lts. In the con text of LPV systems, [30, 29] presents an analysis and state-feedbac k syn thesis fr amew ork for LPV systems with parameter-dep end en t dela ys. S tabilit y and ind uced L 2 p erforman ce conditions are form ulated as LMIs using p arameter-dep endent Lyapuno v–Kraso vskii functionals, enabling conv ex compu ta- tion. Subsequ ently , [5] p rop oses δ -memory-resilie n t gain-sc heduled state-feedbac k con trollers for uncertain L TI/LPV systems, un ifying memoryless and exact-memory control lers while explicitly accoun tin g for mismatc h b et wee n system and con troller d elays. In tegral quadratic constrain ts (IQCs), in tro duced b y Meg retski and Rantz er [17], pro vide an alter- nativ e f r amew ork f or mo d eling n onlinearities and u ncertain ties, including saturation, dead zones, dela ys, p arametric un certain ties, and u nmo d eled dy n amics. IQC s h a v e b een successfully app lied to stabilit y analysis and stabilizatio n of un certain dynamical systems [3, 10, 11 , 25, 26]. F or time-dela y systems, IQC-based metho ds offer seve ral adv an tages o v er LKF-based appr oac h es b y explicitly c har- acterizing th e inp ut-output b eha vior of dela y ed dynamics. This repr esen tation revea ls the sources of conserv atism more transparently and pro vides systematic mechanisms for reducing it. Lib raries of IQC multipliers for cont in uous- and discrete-time L TI systems with time-v aryin g dela ys ha v e b een d ev elop ed [10, 11], w hile alternativ e formulati ons include static IQCs, in put-output method s [8], and qu adratic separation tec hn iques [1]. Despite these adv ances, n early all existing IQC-b ased results for dela y ed systems f o cus pr im ar- ily on stabilit y and p erform ance analysis, whereas cont rol syn thesis w ith in the IQC framew ork has not b een adequately explored. F o r example, [22] presents a r obust L PV analysis fr amew ork that com bines LPV s ystem m o deling w ith un certain ties describ ed by in tegral qu adratic constraints (IQCs)for dela yed systems, pro viding computationally efficien t conditions for assessing robust p er- formance. The a pproac h generalize s the nominal LPV b oun ded real lemma to systems whose sta te matrices h a v e arb itrary dep endence on time-v arying parameters, extending applicabilit y b eyond prior r ational-dep en dence metho ds. It also sh o ws significan t p erformance improv ement using dy- namic IQ C with p arameter dep endent Ly apuno v functions. This observ ation motiv ates the pr esent w ork, which exploits the IQ C metho dology to addr ess the dela y con trol synthesis problem with b oth strin gen t p erf ormance guaran tees and compu tational efficiency . Recen t stud ies su c h as [31] in tro duce a dyn amic IQC-based exact-memory control f ramew ork for uncertain linear syste ms with time-v arying state d ela y s , em b eddin g the dela y op erator dir ectly into th e con troller and yieldin g fully con v ex H ∞ syn thesis conditions with r educed conserv atism. Similarly , [3 2] dev elops a d ynamic IQC-based exact-memory ou tp ut-feedbac k cont rol sc heme for linear systems with time-v aryin g in- put dela ys, resulting in fully con v ex LMI conditions for b oth memoryless an d exact-memory con- trollers. These w orks highligh t the p otenti al of IQC-based framewo rks to brid ge the longstanding gap b et wee n analysis and synthesis. This pap er d ev elops a new control framew ork for LPV systems with time-v arying state delays b y 2 in tegrating p arameter-dep endent Lyapuno v functions with in tegral quadratic constraints (IQCs). Building up on our p rior work on IQC -b ased analysis and con trol of uncertain linear systems with state dela ys and L TI systems with input dela ys [31, 32], the prop osed approac h extends these tec h n iques to the LPV setting, where parameter v ariations and dela y effects interac t in a funda- men tally non trivial manner. Sp ecifica lly , w e inv estigate the state-feedbac k dela y con trol sy nthesis problem for LPV systems with time-v aryin g stat e dela ys under the IQC framewo rk. A nov el dela y- dep end en t con troller structure is prop osed, consisting of a linear state-feedbac k la w augmente d with an additional term that explicitly captures the dela y-dep endent dynamics o f the plan t. Under this con trol scheme, w e apply a b ound ed real lemma to c haracterize closed-lo op stabilit y and L 2 -gain p erforman ce using dynamic IQ Cs and p arameter-dep endent quadratic Ly apunov functions. C on- sequen tly , conv ex synt hesis conditions guarantee ing a prescrib ed L 2 -gain p erform ance are deriv ed in terms of parameter-dep end en t linear matrix inequalities (LMIs). Unlik e traditional dela y analysis and con trol app roac h es based on Lyapuno v–Kraso vskii fun ction- als, the prop osed IQC-based framework offers a fu ndamenta lly different p ersp ectiv e for han d ling dela y effects. By lev eraging the flexibilit y of IQCs together with parameter-dep en d en t L yapuno v functions, th e metho d enables enhanced con trol capabilit y , reduced conserv atism, and impro v ed closed-loop p erformance. By pr oviding a systematic and p o w erful approac h for b oth analysis and syn thesis of time-dela y LPV systems via con vex optimizat ion, the resulting framew ork offers a comp elling alternativ e to con v en tional dela y c on trol metho d s and pa ves the wa y for more adv anced designs. It is worth noting that the p rop osed r esults are b uilt up on the well-e stablished robust stabilit y analysis fr amew ork using IQCs and dissipation inequ alities [21]. Alternativ e robust stabilit y con- ditions for I QC syn thesis exist based on the Kalman–Y akub o vic h–P op o v (KYP) lemma (see, e.g., [17, 25, 26]), w hic h could p oten tially sup p ort complemen tary dela y con trol synthesis app roac hes. Ho wev er, compared with the KYP-based metho d s, the d issipation inequalit y framew ork offers sev- eral d istinctiv e adv an tages for IQC-based r ob u st analysis and sy nthesis. A detailed comparison b et w een th ese approac hes is b eyo nd the scop e of this pap er. Notation . R and C denote the sets of real and complex num b ers resp ectiv ely . R m × n ( C m × n ) represent s the set of real (complex) m × n matrices, while R n ( C n ) denotes the set of real (complex) n × 1 vect ors. The identi t y matrix of dimension n is d en oted b y I n . S n and S n + denote the s ets of real s y m metric n × n matrices and p ositi v e defin ite matrices, resp ectiv ely . A blo c k diagonal matrix with diagonal blo cks X 1 , X 2 , · · · , X p is denoted b y diag { X 1 , X 2 , · · · , X p } . T he sym b ol ⋆ is used in LMIs to in dicate en tries imp lied b y symmetry . F or t w o inte gers k 1 < k 2 , I [ k 1 , k 2 ] := { k 1 , k 1 + 1 , · · · , k 2 } . F or s ∈ C , ¯ s den otes the complex conjugate of s . F or a m atrix M ∈ C m × n , M T denotes the transp ose and M ∗ denotes the c omplex c onjugate transp ose. RL ∞ denotes prop er rational functions with real coefficien ts and no p oles on the i maginary axis, and RH ∞ denotes the subset of RL ∞ consisting o f functions analytic in the c losed righ t hal f-plane. RL m × n ∞ and RH m × n ∞ denote the corresp onding sets of transfer matrices. F or G ∈ R L m × n ∞ , the para-Hermitian co njugate is defined as G ∼ ( s ) := G ( − ¯ s ) ∗ . F or x ∈ C n , the Euclidean norm is d efi ned b y k x k := ( x ∗ x ) 1 / 2 . L n 2+ denotes the sp ace of square-in tegrable fu nctions u : [0 , ∞ ) → R n equipp ed with the norm k u k 2 := R ∞ 0 u T ( t ) u ( t ) dt 1 / 2 < ∞ . F o r u ∈ L n 2+ , u T denotes the truncated signal defined by u T ( t ) = u ( t ) , ∀ t ≤ T and u T ( t ) = 0 otherwise. The extended space L 2 e + , consists of f unctions u suc h that u T ∈ L 2+ for all T ≥ 0. The r emainder of the pap er is organized as f ollo ws. Section 2 provides a b rief r eview of IQCs. Section 3 presents the problem statemen t and t he boun ded r eal l emma for robus t sta bilit y analysis 3 of state-dela yed systems u sing dynamic IQCs. The corresp ond ing dela y control syn thesis conditions are d eriv ed in Section 4. Numerical studies illustrating the effect iv eness and adv an tages of the prop osed con trol design app roac h are p resent ed in Section 5. Finally , conclusions are d ra wn in Section 6. 2 Preliminaries In this section, we b riefly review sev eral fun d amen tal concepts related to in tegral quadratic con- strain ts (IQCs ), whic h form the b asis for the subsequent d ev elopmen ts of this p ap er. Definition 1 ([21]) L et Π ∈ RL ( m 1 + m 2 ) × ( m 1 + m 2 ) ∞ b e a pr op er r ational function, r efe rr e d to as a multiplier, with factorization Π = Ψ ∼ W Ψ , wher e W ∈ S n z and Ψ ∈ RH n z × ( m 1 + m 2 ) ∞ . Two signals v ∈ L n v 2 e + and w ∈ L n w 2 e + ar e said to satisfy the IQC define d by Π and (Ψ , W ) i s c al le d a har d IQC factorization of Π , if the ine quality holds Z T 0 z T ( t ) W z ( t ) dt ≥ 0 (1) holds for al l T ≥ 0 , wher e z ∈ R n z denotes the filter e d output of Ψ d riven by inputs ( v , w ) with zer o initial c onditions , i.e., z = Ψ v w . Mor e over, a b ounde d c ausal op er ator S : L n v 2 e + → L n w 2 e + satisfies the IQC define d by Π if c ondition (1) holds al l admissible signals v , with w = S ( v ) , and for al l T ≥ 0 . The factoriza tion Π = Ψ ∼ W Ψ is generally not uniqu e b ut can b e computed using standard state- space tec hniques [24]. F urthermore, a broad class of multipliers admits hard f actorizat ions [17]. Additional discussions on hard IQCs can b e found in [21, 22]. The concept of hard IQCs, together with the follo wing sp ect ral factorization definition and lemma [21], pla ys a central role in the dissipation in equalit y framework adopted in this work. Definition 2 A p air (Ψ , W ) is c al le d a J m 1 ,m 2 -sp e ctr al factorization of Π = Π ∼ ∈ RL ( m 1 + m 2 ) × ( m 1 + m 2 ) ∞ if Π = Ψ ∼ W Ψ , W = X 1 0 0 − X 2 , wher e Ψ , Ψ − 1 ∈ RH ( m 1 + m 2 ) × ( m 1 + m 2 ) ∞ , and X 1 ∈ S m 1 + , X 2 ∈ S m 2 + . Under a J m 1 ,m 2 -sp ectral f actorization, Ψ is square, stable, and min im um phase. Lemma 1 ([21]) L et Π = Π ∼ ∈ RL ( m 1 + m 2 ) × ( m 1 + m 2 ) ∞ b e p artitione d as Π = Π 11 Π 12 Π ∼ 12 Π 22 , wher e Π 11 ∈ RL m 1 × m 1 ∞ and Π 22 ∈ RL m 2 × m 2 ∞ . If Π 11 ( j ω ) > 0 and Π 22 ( j ω ) < 0 for al l ω ∈ R ∪ {∞} , then Π admits a J m 1 ,m 2 -sp e ctr al factorization (Ψ , W ) , also c onstitutes a har d f actorization. 4 IQCs pro vide a p ow erfu l and flexible to ol f or mo deling a wide range of n onlinearities and u ncertain- ties, and ha v e b een extensiv ely app lied to robu st stability and p erformance analysis of dynamical systems [17, 10, 11, 21, 22]. In particular, libraries of IQC m ultipliers for time-v aryin g d ela ys are a v ailable in [10, 23] for con tinuous-time sys tems and [11] for discrete-time sys tems. Due to space limitations, readers are referred to these references for further details. 3 Problem F orm ulation Consider a class of linear parameter-v arying (LPV) systems with time-v arying state dela ys describ ed b y ˙ x p = A p ( ρ ) x p + A d ( ρ ) D ¯ τ , r ( x p ) + B p 1 ( ρ ) d + B p 2 ( ρ ) u e = C p 1 ( ρ ) x p + C d 1 ( ρ ) D ¯ τ , r ( x p ) + D p 11 ( ρ ) d + D p 12 ( ρ ) u , (2) where x p ∈ R n x denotes the plant state, d ∈ R n d the distur bance inp ut, u ∈ R n u the con trol input, and e ∈ R n e the con trolled output. The op erator D ¯ τ ,r ( x p ) := x p ( t − τ ( t )) rep resen ts the time-v arying state dela y , with the dela y function τ ( t ) b elonging to τ ∈ T ¯ τ ,r := { τ : R + → [0 , ¯ τ ] , | ˙ τ ( t ) | ≤ r } , (3) where ¯ τ and r denote the maxim u m dela y and its v ariation b ound, resp ectiv ely . F or notational simplicit y , we assum e x p ( t ) = 0 for all t ∈ [ − ¯ τ , 0]. F or d ela y-d ep endent control, th e d ela y τ ( t ) is assumed unkno wn a pr iori but measurable in real time. All state-space matrices are con tinuous functions of the sc heduling parameter ρ ∈ P ⊂ R s , where P is compact. Th e p arameter v ariation rate satisfies V = { ν : ν k ≤ ˙ ρ k ≤ ¯ ν k , k ∈ I [1 , s ] } , with V b eing a con v ex p olytope con taining the origin. T o facilitate stabilit y analysis and con troller synthesis, we introd u ce a mo d el transformation that separates the state-dela y nonlinearity f rom the nominal dynamics. Sp ecifically , system (2) can b e rewritten as the interco nnected system P nom : ˙ x p e = A p ( ρ ) + A d ( ρ ) − A d ( ρ ) B p 1 ( ρ ) B p 2 ( ρ ) C p 1 ( ρ ) + C d 1 ( ρ ) − C d 1 ( ρ ) D p 11 ( ρ ) D p 12 ( ρ ) x p w d u , w = S ¯ τ ,r ( x p ) := x p − D ¯ τ ,r ( x p ) . (4) This repr esen tation consists of a d ela y-fr ee n ominal sub system P nom int erconnected with the dela y- induced op erato r S ¯ τ , r ( · ). Su c h LFT-based represen tations are standard in robust con trol theory [35, 14]. The input–output b eha vior of S ¯ τ ,r will b e c haracterized usin g dynamic IQC s. This p ap er addr esses th e H ∞ dela y con trol problem for LPV system (4). Th e ob jectiv e is to design a state-fee dbac k controll er ensu ring k e k 2 < γ k d k 2 under zero initial conditions, for all admissible ( ρ, ˙ ρ ) ∈ P × V and τ ( t ) ∈ T ¯ τ ,r . More sp ecifically , w e will solve the H ∞ syn thesis problem for LPV system (4) b y emplo ying dyn amic IQCs to c haracterize the inp ut-output b ehavi or of the time-v arying dela y nonlinearity . F or this purp ose, w e imp ose the follo win g assumptions. 5 Assumption 1 The p air ( A p ( ρ ) + A d ( ρ ) , B p 2 ( ρ )) is p ar ametric al ly stabilizable. Assumption 2 The op er ator S ¯ τ ,r satisfies IQCs define d by multipliers { Π k } N λ k =1 ∈ RL 2 n x × 2 n x ∞ , wher e th e multipliers { Π k } N λ k =1 with strict definiteness pr op erties e nsuring the existenc e o f J - sp e ctr al factorizations (Ψ k , W k ) . Sp e cific al ly, (Ψ k , W k ) i s in the form of Ψ k = Ψ 11 ,k Ψ 12 ,k 0 I n x ∈ RH ( n x + n x ) × ( n x + n x ) ∞ and W k = X k 0 0 − X k ∈ R ( n x + n x ) × ( n x + n x ) , wher e X k ∈ S n x + . Assumption 1 is s tandard and guaran tees stabilizabilit y of the dela y-free system. Assumption 2 is nonrestrictiv e an d adopted for analytica l con v enience. F or eac h m ultiplier, th e asso ciated IQC filter is realized as ˙ x ψ z k = A ψ B ψ 1 B ψ 2 C ψ, k D ψ 1 ,k D ψ 2 ,k x ψ x p w , k ∈ I [1 , N λ ] (5) where x ψ ∈ R n ψ denotes the state vect or of the IQC-indu ced op erator { Ψ k } N λ k =1 , with zero initial condition x ψ (0) = 0. Th e signals z k ∈ R n z with n z = 2 n x for all k ∈ I [1 , N λ ], rep resen t the corresp ondin g op erator outputs. Under Ass u mption 2, the asso ciated output matrices p ossess the follo win g structure: C ψ, k = ¯ C ψ, k 0 , D ψ 1 ,k = ¯ D ψ 1 ,k 0 , D ψ 2 ,k = ¯ D ψ 2 ,k I n x , k ∈ I [1 , N λ ] . F or state-fee dbac k con trol, w e assume that a ll relev an t state information, including the plan t state x p and the IQC-induced system state x ψ in (5), is a v ailable for feedbac k. It should b e noted that the IQC-indu ced L TI system (5) is introdu ced solely for robustness analysis and con troller syn thesis. Once the r ealizati on of (5) is fixed , the corresp onding state x ψ can b e computed online, since the inpu t signals x p and w = S ¯ τ ,r ( x p ) are a v ailable in real time. Therefore, we prop ose th e dela y-dep endent state-feedbac k controlle r in LPV form: u = F c ( ρ ) x p x ψ + H c ( ρ ) S ¯ τ , r ( x p ) , (6) where F c ( ρ ) ∈ R n u × ( n x + n ψ ) and H c ( ρ ) ∈ R n u × n x are cont roller gain matrices to b e designed. This con troller exp licitly incorp orates d elay- dep en den t dynamics. In particular, the prop osed dela y- comp ensating mechanism utilizes the past state information of the plant x p o v er th e inte rv al [ t − ¯ τ , t ]. This str u cture enables the controll er gains to b e sc heduled o nline based on real -time measuremen ts of the d ela y parameter τ ( t ) and parameter ρ . The resu lting closed-loop system by in terconnecting the controlle d plant (4), the IQC-induced system (5) and the control ler (6) is giv en by ˙ x cl z k e = A cl ( ρ ) B cl 1 ( ρ ) B cl 2 ( ρ ) C cl 1 ,k D cl 11 ,k D cl 12 ,k C cl 2 ( ρ ) D cl 21 ( ρ ) D cl 22 ( ρ ) x cl w d , w = S ¯ τ ,r ( x p ) , (7) 6 where x cl := [ x T p x T ψ ] T and A cl ( ρ ) B cl 1 ( ρ ) B cl 2 ( ρ ) C cl 1 ,k D cl 11 ,k D cl 12 ,k C cl 2 ( ρ ) D cl 21 ( ρ ) D cl 22 ( ρ ) = A p ( ρ ) + A d ( ρ ) 0 − A d ( ρ ) B p 1 ( ρ ) B ψ 1 A ψ B ψ 2 0 D ψ 1 ,k C ψ, k D ψ 2 ,k 0 C p 1 ( ρ ) + C d 1 ( ρ ) 0 − C d 1 ( ρ ) D p 11 ( ρ ) + B p 2 ( ρ ) 0 0 D p 12 F c ( ρ ) H c ( ρ ) I 0 0 0 I 0 (8) := A aug ( ρ ) B aug 0 ( ρ ) B aug 1 ( ρ ) C aug 0 D aug 00 0 C aug 1 ( ρ ) D aug 10 ( ρ ) D aug 11 ( ρ ) + B aug 2 ( ρ ) 0 D aug 12 ( ρ ) F c ( ρ ) H c ( ρ ) I 0 0 0 I 0 . In particular, for all k ∈ I [1 , N λ ], we ha v e C cl 1 ,k := ¯ C cl 1 ,k 0 = ¯ D ψ 1 ,k ¯ C ψ, k 0 0 , D cl 11 ,k D cl 12 ,k := ¯ D cl 11 ,k ¯ D cl 12 ,k I n x 0 = ¯ D ψ 2 ,k 0 I n x 0 . W e no w recall the b ounded real lemma for robust stabilit y and L 2 gain p erformance under I Q Cs [22]. Theorem 1 Consider the close d-lo op system (7). If ther e exist p ar ameter-dep endent matric es P ( ρ ) ∈ S n x + n ψ + , X k ( ρ ) ∈ S n x + for al l k ∈ I [1 , N λ ] , and sc alar γ > 0 satisfying the fol lowing LMI He { P ( ρ ) A cl ( ρ ) } + P s i =1 { ν i , ¯ ν i } ∂ P ∂ ρ i ⋆ ⋆ B T cl 1 ( ρ ) P ( ρ ) − P N λ k =1 X k ( ρ ) ⋆ B T cl 2 P 0 − γ I n d + N λ X k =1 ¯ C T cl 1 ,k ¯ D T cl 11 ,k ¯ D T cl 12 ,k X k ( ρ ) ¯ C cl 1 ,k ¯ D cl 11 ,k ¯ D cl 12 ,k + 1 γ C T cl 2 ( ρ ) D T cl 21 ( ρ ) D T cl 22 ( ρ ) C cl 2 ( ρ ) D cl 21 ( ρ ) D cl 22 ( ρ ) < 0 (9) for al l ( ρ, ˙ ρ ) ∈ P × V , then the c lose d-lo op system (7) with time-varying state-delay is stable with L 2 gain less than γ . 4 Dela y ed-Dep enden t Con trol S yn th esis Based on the an alysis results in Sectio n 3, we n o w add r ess the H ∞ syn thesis problem f or the dela y- dep end en t con troller (6). The synthesis conditions are formulate d in terms of p arameter-dep endent LMIs, as stated in the follo w ing theorem. 7 Theorem 2 Consider the state-delaye d LPV plant (2). Supp ose ther e exist p ositive-definite ma- tric es R ( ρ ) ∈ S n x + n ψ + , ˆ X k ( ρ ) ∈ S n x + for al l k ∈ I [1 , N λ ] , a r e ctangular matrix ˆ X ( ρ ) ∈ R n x × n x , and a sc alar γ > 0 such that, f or al l ρ ∈ P the fol lowing LMIs hold. N T R ( ρ ) He A p ( ρ ) + A d ( ρ ) 0 B ψ 1 A ψ R ( ρ ) − { ν i , ¯ ν i } ∂ R ∂ ρ ⋆ ⋆ ⋆ ⋆ ˆ X T ( ρ ) − A T d ( ρ ) B T ψ 2 − N λ X k =1 ( ˆ X ( ρ ) + ˆ X T ( ρ ) − ˆ X k ( ρ )) ⋆ ⋆ ⋆ B T p 1 ( ρ ) 0 0 − γ I n d ⋆ ⋆ ˆ Υ 41 ( ρ ) ˆ Υ 42 ( ρ ) 0 − ˆ Λ( ρ ) ⋆ C p 1 ( ρ ) + C d 1 ( ρ ) 0 R ( ρ ) − C d 1 ( ρ ) ˆ X ( ρ ) D p 11 ( ρ ) 0 − γ I n e N R ( ρ ) = N T R ( ρ ) He { A aug ( ρ ) R ( ρ ) } − { ν i , ¯ ν i } ∂ R ∂ ρ ⋆ ⋆ ⋆ ⋆ ˆ X T ( ρ ) B T aug 0 ( ρ ) − N λ X k =1 ( ˆ X ( ρ ) + ˆ X T ( ρ ) − ˆ X k ( ρ )) ⋆ ⋆ ⋆ B T aug 1 ( ρ ) 0 − γ I n d ⋆ ⋆ ˆ Υ 41 ( ρ ) ˆ Υ 42 ( ρ ) 0 − ˆ Λ( ρ ) ⋆ C aug 1 ( ρ ) R ( ρ ) D aug 10 ( ρ ) ˆ X ( ρ ) D aug 11 ( ρ ) 0 − γ I n e N R ( ρ ) < 0 , (10) − γ I ⋆ ⋆ 0 − ˆ Λ 0 D p 11 ( ρ ) 0 − γ I < 0 , (11) wher e N R ( ρ ) = Ker[ B T p 2 ( ρ ) 0 0 0 0 D T p 12 ( ρ )] = Ker[ B T aug 2 ( ρ ) 0 0 0 D T aug 12 ( ρ )] and ˆ Υ 41 ( ρ ) = ¯ D ψ 1 , 1 ¯ C ψ 1 , 1 R ( ρ ) . . . ¯ D ψ 1 ,N λ ¯ C ψ 1 ,N λ R ( ρ ) = C aug 0 R ( ρ ) , ˆ Υ 42 ( ρ ) = ¯ D ψ 2 , 1 ˆ X ( ρ ) . . . ¯ D ψ 2 ,N λ ˆ X ( ρ ) = D aug 00 ˆ X ( ρ ) , ˆ Λ( ρ ) = diag { ˆ X 1 ( ρ ) , · · · , ˆ X N λ ( ρ ) } . Then, the LP V syst em (2) with time- varying stat e delay i s stabilize d by the state-fe e db ack c ontr ol ler (6) and achieves an L 2 gain less than γ for al l p ar ameter tr aje ctories ( ρ, ˙ ρ ) ∈ P × V and al l admissible delay τ ∈ T ¯ τ ,r . Pr o of: F rom Th eorem 1, the c losed-lo op system (7) is sta ble and ac hiev es an L 2 gain le ss than γ if condition (9) is satisfied. Th is directly implies that the state-dela yed LPV s y s tem (2) is stabilized with the prescrib ed per f ormance lev el. Under Ass umption 2, sub stituting th e IQ C scaling mat rices W k , k ∈ I [1 , N λ ] into condition (9), and applying the Sc h ur complement yields condition He { P A cl } + ˙ P ⋆ ⋆ ⋆ ⋆ B T cl 1 P − P N λ k =1 X k ⋆ ⋆ ⋆ B T cl 2 P 0 − γ I n d ⋆ ⋆ Υ 41 Υ 42 Υ 43 − Λ ⋆ C cl 2 D cl 21 D cl 22 0 − γ I n e < 0 , (12) 8 where Υ 41 = ¯ C cl 1 , 1 . . . ¯ C cl 1 ,N λ , Υ 42 = ¯ D cl 11 , 1 . . . ¯ D cl 11 ,N λ , Υ 43 = ¯ D cl 12 , 1 . . . ¯ D cl 12 ,N λ , Λ = diag n X − 1 1 , · · · , X − 1 N λ o . Then, define R = P − 1 and ˆ X k = X − 1 k for all k ∈ I [1 , N λ ]. Using the inequalit y − ˆ X − 1 k ≤ − ˆ X − T ( ˆ X T + ˆ X − ˆ X k ) ˆ X − 1 , which holds for any n on -sin gular matrix ˆ X ∈ R n x × n x , a sufficien t condition for (12) is give n by He { R − 1 A cl } + ˙ R − 1 ⋆ ⋆ ⋆ ⋆ B T cl 1 R − 1 − ˆ X − T P N λ k =1 ( ˆ X + ˆ X T − ˆ X k ) ˆ X − 1 ⋆ ⋆ ⋆ B T cl 2 R − 1 0 − γ I n d ⋆ ⋆ Υ 41 Υ 42 Υ 43 − Λ ⋆ C cl 2 D cl 21 D cl 22 0 − γ I n e < 0 . (13) Rewriting this condition in term s of the augmen ted sy s tem matrices leads to the follo wing inequalit y He { A aug R } − ˙ R ⋆ ⋆ ⋆ ⋆ ˆ X T B T aug 0 − P N λ k =1 ( ˆ X + ˆ X T − ˆ X k ) ⋆ ⋆ ⋆ B T aug 1 0 − γ I n d ⋆ ⋆ C aug 0 R D aug 00 ˆ X 0 − ˆ Λ ⋆ C aug 1 R D aug 10 ˆ X D aug 11 0 − γ I n e + B aug 2 0 0 0 D aug 12 F c R H c ˆ X I 0 0 0 0 0 I 0 0 0 + I 0 0 I 0 0 0 0 0 0 RF T c ˆ X T H T c B T aug 2 0 0 0 D T aug 12 < 0 . (14) Finally , applying the E limin ation Le mma [2] yie lds conditions ( 10) and ( 11), completing the pr o of. Q.E.D. Conditions (10) and (11) are parameter-dep enden t LMIs. Since R ( ρ ), ˆ X ( ρ ), and ˆ X k ( ρ ) are parameter- dep end en t matrix fun ctions, they are approxima ted u sing basis function expansions: R ( ρ ) = n f X i =1 f i ( ρ ) R i , ˆ X ( ρ ) = n g X i =1 g i ( ρ ) ˆ X i , ˆ X k ( ρ ) = n g X i =1 g i ( ρ ) ˆ X k ,i A fin ite set of grid ding p oin ts o v er the parameter space P is then selected. Th e con trol d esign problem then reduces to the con v ex optimizatio n problem min R i , ˆ X i , ˆ X k,i , ∀ k ∈ I [1 ,N λ ] γ s.t. (10)-(11) . (15) 9 Solving (15) yields the matrix f unctions R ( ρ ), ˆ X ( ρ ), and ˆ X k ( ρ ). The con troller v ariables ˆ F c ( ρ ) = F c ( ρ ) R ( ρ ) and ˆ H c ( ρ ) = H c ( ρ ) ˆ X ( ρ ) can then b e compu ted p oin t w ise by enforcing feasibilit y of (14). Consequent ly , th e delay- dep en den t controlle r gains are reco vered as F c ( ρ ) = ˆ F c ( ρ ) R − 1 ( ρ ) , H c ( ρ ) = ˆ H c ( ρ ) ˆ X − 1 ( ρ ) . Remark 1 The derivation of The or em 2 involves a r elaxation fr om (12) to (13) using the ine quality − ˆ X − 1 k ≤ − ˆ X − T ( ˆ X T + ˆ X − ˆ X k ) ˆ X − 1 . This r elaxation may intr o duc e c onservatism when multiple IQC multipliers ar e employe d. However, for the single-multiplier c ase ( N λ = 1 ), the synthesis c ondition (10) is e quivalent to the analys is c ondition (12). Imp ortantly, in b oth c ases, the synthesis c onditions ar e c onvex and c an b e e ffic i ently solve d using semidefinite pr o gr amming [2 ]. 5 Numerical Example In this s ection, a numerical example is presented to illustrate the design pro cedu r e and p erformance of the p rop osed delay- dep enden t LPV cont roller. Consider the LPV state-dela ye d sys tem ˙ x p ( t ) = 0 1 + φρ ( t ) − 2 − 3 + σ ρ ( t ) x p ( t ) + φρ ( t ) 0 . 1 − 0 . 2 + σ ρ ( t ) − 0 . 3 x p ( t − τ ( t )) + 0 . 2 0 . 2 d ( t ) + φρ ( t ) 0 . 1 + σ ρ ( t ) u ( t ) , e ( t ) = 0 10 0 0 x p ( t ) + 0 0 . 1 u ( t ) , (16) where φ = 0 . 2, σ = 0 . 1, and the time-v aryin g p arameter ρ ∈ [ − 1 , 1]. Th e dela y τ ( t ) satisfies τ ∈ T ¯ τ ,r . This sys tem has also b een stud ied in [30, 33, 5]. F or the IQC-based dela y-dep end en t LPV control synthesis, t wo dynamic IQC m ultipliers from [ 10] could b e used to charact erize the dela y op erator S ¯ τ , r ( x p ): Π 1 ( s ) = | φ ( s ) | 2 X 1 0 0 − X 1 , Π 2 ( s ) = | ϕ ( s ) | 2 X 2 0 0 − X 2 (17) where X 1 , X 2 ∈ S 2 + , φ ( s ) = k 1 ¯ τ 2 s 2 + c 1 ¯ τ s ¯ τ 2 s 2 + a 1 ¯ τ s + k 1 c 1 + ǫ , ϕ ( s ) = k 2 ¯ τ 2 s 2 + c 2 ¯ τ s ¯ τ 2 s 2 + a 2 ¯ τ s + b 2 + δ, with k 1 = 1 + 1 √ 1 − r , a 1 = √ 2 k 1 c 1 , c 1 < 2 k 1 , k 2 = q 8 2 − r , a 2 = √ 6 . 5 + 2 b 2 , b 2 = √ 50, c 2 = √ 12 . 5, and arbitrarily small ǫ, δ > 0. In this example, c 1 = 1 , ǫ = 10 − 7 , and δ = 0 . 0001. Applying the IQC f actorizat ion metho d s from [21 , 22] yields J -sp ectral factorizations of Π 1 and Π 2 in (17): Ψ 1 ( s ) = k 1 ( c 1 − a 1 ) ¯ τ s − k 2 1 c 1 / ¯ τ 2 s 2 + a 1 ¯ τ s + k 1 c 1 / ¯ τ 2 + k 1 + ǫ I 2 0 0 I 2 , Ψ 2 ( s ) = k 2 ( c 2 − a 2 ) ¯ τ s − k 2 b 2 / ¯ τ 2 s 2 + a 2 ¯ τ s + b 2 / ¯ τ 2 + k 2 + δ I 2 0 0 I 2 . (18) 10 The resulting I QC-induced L TI s y s tem { Ψ k } 2 k =1 satisfies Assumption 2, and its d ynamics can b e expressed in the form of (5) with system matrices: A ψ = ˜ A ψ 0 0 ˜ A ψ , B ψ 1 = ˜ B ψ 1 0 0 ˜ B ψ 1 , B ψ 2 = 0 , ¯ C ψ, 1 = " ˜ ¯ C ψ, 1 0 0 ˜ ¯ C ψ, 1 # , ¯ D ψ 1 , 1 = k 1 + ǫ 0 0 k 1 + ǫ , ¯ D ψ 2 , 1 = 0 , ¯ C ψ, 2 = " ˜ ¯ C ψ, 2 0 0 ˜ ¯ C ψ, 2 # , ¯ D ψ 1 , 2 = k 2 + δ 0 0 k 2 + δ , ¯ D ψ 2 , 2 = 0 , with ˜ A ψ = 0 1 0 0 − k 1 c 1 ¯ τ 2 − a 2 ¯ τ 0 0 0 0 0 1 0 0 − b 2 ¯ τ 2 − a 2 ¯ τ , ˜ B ψ 1 = 0 1 0 1 , ˜ ¯ C ψ, 1 = h − k 2 1 c 1 ¯ τ 2 k 1 ( c 1 − a 1 ) ¯ τ 0 0 i , ˜ ¯ C ψ, 2 = h 0 0 − b 2 k 2 ¯ τ 2 k 2 ( c 2 − a 2 ) ¯ τ i . Based on suc h a system s etup , we will fi rst examine the b enefits of employing parameter-dep enden t Ly apuno v fu nctions compared with constan t Lyapuno v functions. F or r ≤ 0 . 5, b oth IQ C multipliers in ( 17) are used for con troller syn thesis, whereas for r > 0 . 5, only the m ultiplier Π 2 is app lied. Th e parameter sp ace is gridded b y 11 p oints. Consisten t with the observ ations in [31 ], increasing the dela y-deriv ativ e b oun d r leads to a reduction in the adm issible dela y margin. Nev ertheless, compared with existing appr oac hes [30, 33, 5], th e p rop osed IQC -based design consistentl y yields substanti ally larger delay margins and remains feasible eve n in regimes where alternativ e metho d s fail. Bey ond en hanced dela y tolerance, the prop osed fr amew ork p ro vides a systematic mec hanism for handling dela y effects by c haracterizing the dela y dynamics exclusiv ely through selected IQC mul- tipliers. This feature offers imp ro v ed flexibilit y , allo w in g the approac h to accommo date v arious dela y characte ristics, p ro vided a ppropr iate IQCs are a v ailable. F ur thermore, the IQ C-based d esign exhibits reduced conserv atism, leading to imp ro v ed L 2 gain p erformance across a br oad r an ge of dela y conditions. Three design metho ds are considered for comparison: 1. Dela y-dep enden t LP V con tr ol using a s in gle quadr atic Lyapuno v funtion; 2. LFT-based exact-memory con trol obtained by treating the scheduling parameter ρ as an uncertain t y; 3. Dela y-dep enden t LP V con tr ol using parameter-dep en d en t Ly apunov functions with f 1 ( ρ ) = 1 , f 2 ( ρ ) = ρ, f 2 ( ρ ) = ρ 2 g 1 ( ρ ) = 1 , g 2 ( ρ ) = ρ. Since the LFT exact-me mory app r oac h do es not exp licitly utilize rea l-time parameter in f ormation, its p erformance is sligh tly inferior to that of the LPV-based cont rollers. In con trast, parameter- dep end en t Ly apuno v functions, which e xplicitly capture parameter v ariations with b ounded rates, 11 generally pro vide less conserv ativ e results than constan t Lyapuno v fu nction metho ds. In partic- ular, for relativ ely small p arameter v ariation rates, the parameter-dep enden t formulation yields noticeable impr o v ements in con trolled p erformance, as clearly illus tr ated in T able 1. T able 1: P erf ormance comparison of different dela y dep enden t con trol metho d s Metho d parameter v ariation rate ν (Dela y d eriv ativ e r , dela y b ound τ ) (0, 10) (0.5, 2.5) (0 .9, 1) ( 1.5, 1) (1.7, 2.5) Quadratic LF 3.6859 3.6494 1.8506 1.9381 3.9573 LFT approac h [31] 3.6864 3.6507 1.8510 1.9383 3.9580 P arameter- dep end en t LF 0.1 3.4501 2.4843 1.8472 1.8982 2.5334 0.5 3.5783 3.1911 1.8497 1.9287 3.3433 1 3.5903 3.2886 1.8500 1.9311 3.4650 5 3.6068 3.4625 1.8501 1.9337 3.6888 10 3.6117 3.5338 1.8502 1.9344 3.7879 The improv ed p erformance obtained w ith parameter-dep endent Lyapuno v functions can b e at- tributed to their abilit y to explicitly captur e th e dep end ence of the system d ynamics on the sc hedul- ing parameter. Unlik e constan t Ly apunov fun ctions, whic h enforce a uniform stabilit y certificate o v er the en tire p arameter set, p arameter-dep endent Lya punov functions allo w the Lyapuno v ma- trix to v ary with ρ . This additional degree of fr eedom enables a tigh ter charac terization of the system’s stabilit y and p erformance prop erties, thereby reducing conserv atism. C onsequen tly , the parameter-dep endent Lyapuno v framewo rk t ypically results in less conserv ativ e s tability and p er- formance conditions, explaining th e observ ed imp r o v emen t in the ac hiev able L 2 gain lev els. T o illustrate the pr op osed dela y-dep end en t con trol strategy via time-domain sim ulations, we con- sider the time-v aryin g parameter ρ ( t ) = sin(0 . 5 t ) and the state-dela y function τ ( t ) = 0 . 2 sin(6 t ) + 1 . 8, yielding the b ounds ( r , ¯ τ ) = (1 . 2 , 2). Since the dela y-deriv ativ e b ound exceeds unit y , con ven- tional m etho ds [30, 33, 5] are not applicable. In con trast, b y so lving the optimization problem (15) with the IQC multiplier Π 2 , w e obtain an o ptimized L 2 gain γ = 2 . 0953 along with the corresp ond- ing con troller gains. With zero in itial co nditions and a unit pu lse d isturbance applied ov er [0 , 2] sec , sim ulations are p erformed using the syn thesized con troller. The system r esp onses are depicted in Fig. 1. Despite the p resence of parameter v ariations and ti me-v arying sta te d elays, the p lan t states con v erge rapid ly to zero while maint aining a reasonable cont rol effort. 6 Concluding Remarks In th is pap er, a no vel dela y-dep enden t control framework has b een d evelo p ed within the IQC- based r ob u st analysis and syn thesis paradigm f or LPV systems w ith time-v arying state dela ys. The prop osed con troller adopts a state-feedbac k structur e comp osed o f a con v en tional memoryless comp onent augmen ted w ith an additional term that explicitly captures dela y-dep enden t dyn am- ics. Dynamic IQ Cs are emplo yed to c haracterize the inp ut–output b eha vior of the s tate-dela y op erator, enab lin g a unified treatmen t of robust stabilit y analysis and cont roller syn thesis. Dela y- dep end en t LP V syn th esis conditions guarantee ing robust L 2 -gain p erform an ce a re derived in terms of parameter-dep enden t LMIs, whic h can b e solved efficien tly via conv ex optimization. Numerical 12 0 2 4 6 8 10 12 14 16 18 20 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 (a) p lant states: x 1 (solid line), x 2 (dash line) 0 2 4 6 8 10 12 14 16 18 20 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 (b) delay ed states 0 2 4 6 8 10 12 14 16 18 20 -5 -4 -3 -2 -1 0 1 (c) control input Figure 1: S im ulation resu lts. studies demonstrate that the prop osed dela y-dep end en t con trol strategy ac hieves impro v ed closed- lo op p erform an ce while main taining a systematic and computationally tracta ble design pro cedure. F rom a metho d ological p ersp ectiv e, the pap er in tro d uces a d ela y-dep enden t state-feedbac k con- troller with exact memory for LPV systems with time-v arying dela ys and establishes a unified IQC-based s yn thesis framew ork u sing dynamic multipliers and parameter-dep end en t Lyapuno v functions. Compared with classic al dela y-d ep enden t appr oac hes based on Ly apuno v–Kraso vs k ii functionals, the prop osed form u lation pro vides a le ss conserv ativ e and more structured design p r o- cedure wh ile retaining f av orable computational p rop erties. The d evelo p ed IQC-based appr oac h offers a simple y et r igorous framew ork for dela y-dep endent con troller design. Owing to the gen- eralit y of the IQC form ulation, the results can b e naturally extended to accommod ate alternativ e p erforman ce ob jectiv es, suc h as robu st H 2 p erforman ce, as w ell as b roader classes of uncertain ties and nonlinearities, including parametric u ncertain t y , unmo d eled d ynamics, saturation, deadzone, and slop e-b ounded n onlinearities. An imp ortan t dir ection for fu ture w ork is the application of the prop osed metho dology to netw orked cont rol systems, where comm u nication dela ys and un certain- ties are in trinsic features. 13 References [1] Y. Ariba and F. Gouaisbaut, “In p ut-output framew ork for robu st stabilit y of time-v arying dela y sys tems,” in Pr o c. Joint 48th. IE E E Conf. on De c. Contr. and 28th. Chinese Contr. Confer enc e , Dec. 2009, pp. 274-279 . [2] S. Bo yd, L. El Ghaoui, E. F eron, and V. Balakrishnan, Line ar Matrix Ine qualities in System and Contr ol The ory . Philadelphia, P A: S I AM, 1994. [3] C. Briat, Line ar Par ameter-V arying and Time-D elay Systems–Analysis, Observation, Filtering & Contr ol . Springer-Heidelb erg, German y , vol. 3, 2015. [4] C. Briat, O. Sename, and J . F. Lafa y , “A fu ll-blo c k S -pro cedure application to delay- dep en d en t H ∞ state-feedbac k cont rol of uncertain time-dela y sy s tems,” in Pr o c. 17th. IF AC W orld Congr ess , Jul. 2008, p p . 12 342-12 347. [5] C. Briat, O. Sename, and J. F. Lafa y , “Memory-resilien t gain-sc heduled state -feedbac k c on trol of uncertain L TI/LPV systems with time-v arying dela ys,” Syst. Contr. L e tts. , 59:451-459 , 2010. [6] H. Dong, Z. W ang, and J. Lam, “F uzzy-mo del-based r obust fault d etectio n with sto chasti c mixed t ime d ela ys and succe ssiv e pac ke t drop outs,” IEEE T r ans. Syst., M an, Cyb ern. P art B, Cyb ern. , 42(2 ):365-3 76, 2012. [7] E. F ridm an, Intr o duction to Time- Delay Systems: Ana lysis and Contr ol . Birkhauser, 2014. [8] E. F ridman and U. Shaked, “Inpu t-output approac h to stabilit y and L 2 -gain analysis of sys tems with time-v arying dela y s ,” Syst. Contr. L etts. , 55:1041 -1053, 2006. [9] K. Gu, V. L. Kharitono v, and J . Chen, Stability of Time-Delay Systems . Boston: Birkhauser, 2003. [10] C. Kao and A. Ran tzer, “Stabilit y analysis of systems w ith uncertain time-v arying d ela ys ,” Autom atic a , 43:959 -970, 2007. [11] C. Kao, “On stability of discrete-time L TI systems with v arying time delays,” IE EE T r ans. Autom . Contr ol , 57(5):1 243-12 48, 2012. [12] H. R. Karimi and H. Gao, “New dela y-dep endent exp onential H ∞ sync hronization f or un- certain neural net works with mixed time delays,” IEEE T r ans. Syst., Man, Cyb ern. P art B, Cyb ern. , 40(1 ):173-1 85, 2010. [13] M. Krstic, “Comp ensation of infinite-dimensional actuat or and sensor dynamics,” IEEE Con- tr ol Systems M agazine , 30(1):22- 41, 2010 . [14] X. Li, H. Gao, and X. Y u, “A unifi ed app roac h to the stabilit y of generalized static neu r al net w orks w ith linear fractional uncertain ties and d ela ys ,” IEEE T r ans. Syst., Man, Cyb ern. Part B, Cyb ern. , 41(5):127 5-1286 , 2011. [15] F. Liu, H. Gao, J. Qiu, S . Yin, J. F an, and T. Chai, “Net w ork ed m ultirate output feedbac k con trol for setp oin ts comp ensation and its application to rougher flotation pro cess,” IEEE T r ans. Ind. Ele ctr on. , 61(1):460 -468, 2014. 14 [16] X. Mao and Q. W ang, “Dela y-dep endent con trol d esign for a time-dela y su p ercavit ating vehicle mo del,” J. Vibr ation Contr ol , 17(3):4 31-448 , 2010. [17] A. Megretski and A. Rantzer, “System analysis via integral quadratic constraints,” IEEE T r ans. Autom. Contr ol , 42:819-8 30, 1997. [18] S. Niculescu and K. Gu, A dvanc es in Time-Delay Systems . Springer, 2004. [19] P . Pa rk, “A d ela y-dep endent stability criterion for systems w ith uncertain time-in v arian t de- la ys ,” IEEE T r ans. Auto m. Contr ol , 44:876-8 77, 1999. [20] J. Qiu, G. F eng, and J. Y ang, “A new design of dela y-dep endent r ob u st H ∞ filtering for discrete-time T-S fuzzy systems with time-v arying d ela y ,” IEEE T r ans. F uzzy Syst. , 17(5):10 44- 1058, 2009. [21] P . Seiler, “Stabilit y analysis with d iss ipation inequalities and integral quadratic constrain ts,” IEEE T r ans. Autom. Contr ol , 60(6):1704 -1709, 2014. [22] H. Pfi fer and P . Seiler, “Ro bustness analysis of linear p arameter v arying systems us in g int egral quadratic constraints,” Int. J. R obust Nonl. Contr ol , 25:2843 –2864, 2015. [23] H. Pfifer and P . Seiler, “In tegral quadratic constrain ts for dela y ed nonlinear and parameter- v arying systems,” Autom atic a , 56:36- 43, 2015. [24] C. Sc h erer and S. W eiland, Line ar Matrix Ine qualities in Contr ol . L ecture Notes, Dutch Insti- tute for Systems and Con trol, Delft, T he Netherlands, 2000 . [25] J. V eenman and C. W. Sc herer, “A synthesis framew ork for robust gain-sc h eduling con trollers,” Autom atic a , 50:279 9-2812 , 2014. [26] J. V eenman and C. W. Scherer, “IQC-synt hesis with general dyn amic m ultipliers,” Int. J. of R obust N onl. Contr ol , 24:3027-305 6, 2014. [27] T. W ang, H. Gao, and J. Qiu, “A com bined adaptiv e neural n et w ork and nonlinear mo del predictiv e con trol for m ultirate n et w orked industrial pr o cess control, ” IEEE T r ans. Neur al Network L e arning Systems , 27(2):416- 425, 2016. [28] Y. W ang, H. Z hang, X. W ang, and D. Y ang, “Net work ed sync hronization con trol of coup led dynamic net w orks with time-v arying d ela y ,” IEEE T r ans. Syst., Man, Cyb ern. Part B, Cyb ern. , 40(6): 1468-14 79, 2010. [29] F. W u, “Dela y-d ep enden t induced L 2 norm analysis and cont rol for LPV systems with state dela ys,” in Pr o c. Int. Me chanic al Engine ering Congr ess and Exp osition , Oct. 2001. [30] F. W u and K. M. Grigoriadis, “LPV sys tems with parameter-v arying time delays: Analysis and cont rol,” A utomatic a , 37:22 1-229, 2001. [31] C. Y uan and F. W u , “Dynamic I QC-based con trol of un certain LFT systems with time-v arying state delay ,” IEEE T r ans. Cyb ernetics , 46(12):33 20-332 9, 2016. [32] C. Y uan and F. W u, “Exact-memory and memoryless con trol of linear systems with time- v arying inp ut dela y u sing dyn amic IQCs,” Automatic a , 77(3):246- 253, Mar. 2017. 15 [33] F. Zhang and K. Grigoriadis, “Dela y-dep enden t stability analysis and H ∞ con trol for state- dela y ed LPV sys tem,” in M e diterr ane an Conf. Contr ol and Automat ion , 2005, pp. 1532-153 7. [34] L. Zhang, Z. Ning, and P . Shi, “Input-output approac h to con trol for fuzzy m arko v j ump sys- tems with time-v arying dela ys and un certain pac k et drop out rate,” IEEE T r ans. Cyb ernetics , 45(11 ):2449-2 460, 2014. [35] K. Zh ou, J. C. Do yle, and K. Glo v er, R obust and O ptimal Contr ol . Englewoo d Cliffs, NJ: Pren tice Hall, 1996 . 16
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment