Adaptive-Horizon Conflict-Based Search for Closed-Loop Multi-Agent Path Finding
MAPF is a core coordination problem for large robot fleets in automated warehouses and logistics. Existing approaches are typically either open-loop planners, which generate fixed trajectories and struggle to handle disturbances, or closed-loop heuristics without reliable performance guarantees, limiting their use in safety-critical deployments. This paper presents ACCBS, a closed-loop algorithm built on a finite-horizon variant of CBS with a horizon-changing mechanism inspired by iterative deepening in MPC. ACCBS dynamically adjusts the planning horizon based on the available computational budget, and reuses a single constraint tree to enable seamless transitions between horizons. As a result, it produces high-quality feasible solutions quickly while being asymptotically optimal as the budget increases, exhibiting anytime behavior. Extensive case studies demonstrate that ACCBS combines flexibility to disturbances with strong performance guarantees, effectively bridging the gap between theoretical optimality and practical robustness for large-scale robot deployment.
💡 Research Summary
The paper addresses the Multi‑Agent Path Finding (MAPF) problem that underlies the coordination of thousands of robots in modern automated warehouses and fulfillment centers. Classical MAPF solvers fall into two categories. Open‑loop planners such as MAPF‑LNS, LaCAM, and related prioritized or local‑search methods are highly scalable but provide no optimality guarantees and can behave unpredictably when disturbances occur. Closed‑loop planners based on Conflict‑Based Search (CBS) and its variants (ECBS, M*, etc.) guarantee completeness and optimality but must resolve conflicts over the entire planning horizon, leading to exponential growth of the search tree and prohibitive runtimes for large, dense instances.
To bridge this gap, the authors propose Adaptive‑Horizon Conflict‑Based Search (ACCBS), a closed‑loop algorithm that embeds a finite‑horizon version of CBS within a model‑predictive‑control (MPC)‑style loop. At each discrete time step t, ACCBS receives the current MAPF instance Iₜ and the current state xₜ, then solves a horizon‑H optimization problem that produces H‑step trajectories for all agents. Only the first step of these trajectories is executed as the control input ˆuₜ; the remainder is discarded. The cost function combines (1) a running cost that penalizes each agent for every time step it is not at its goal (the standard sum‑of‑costs objective) and (2) a terminal cost equal to the shortest‑path distance from the agent’s position at horizon H to its goal. This terminal cost is an admissible heuristic that approximates the infinite‑horizon tail, giving the finite‑horizon problem a Lyapunov‑like property.
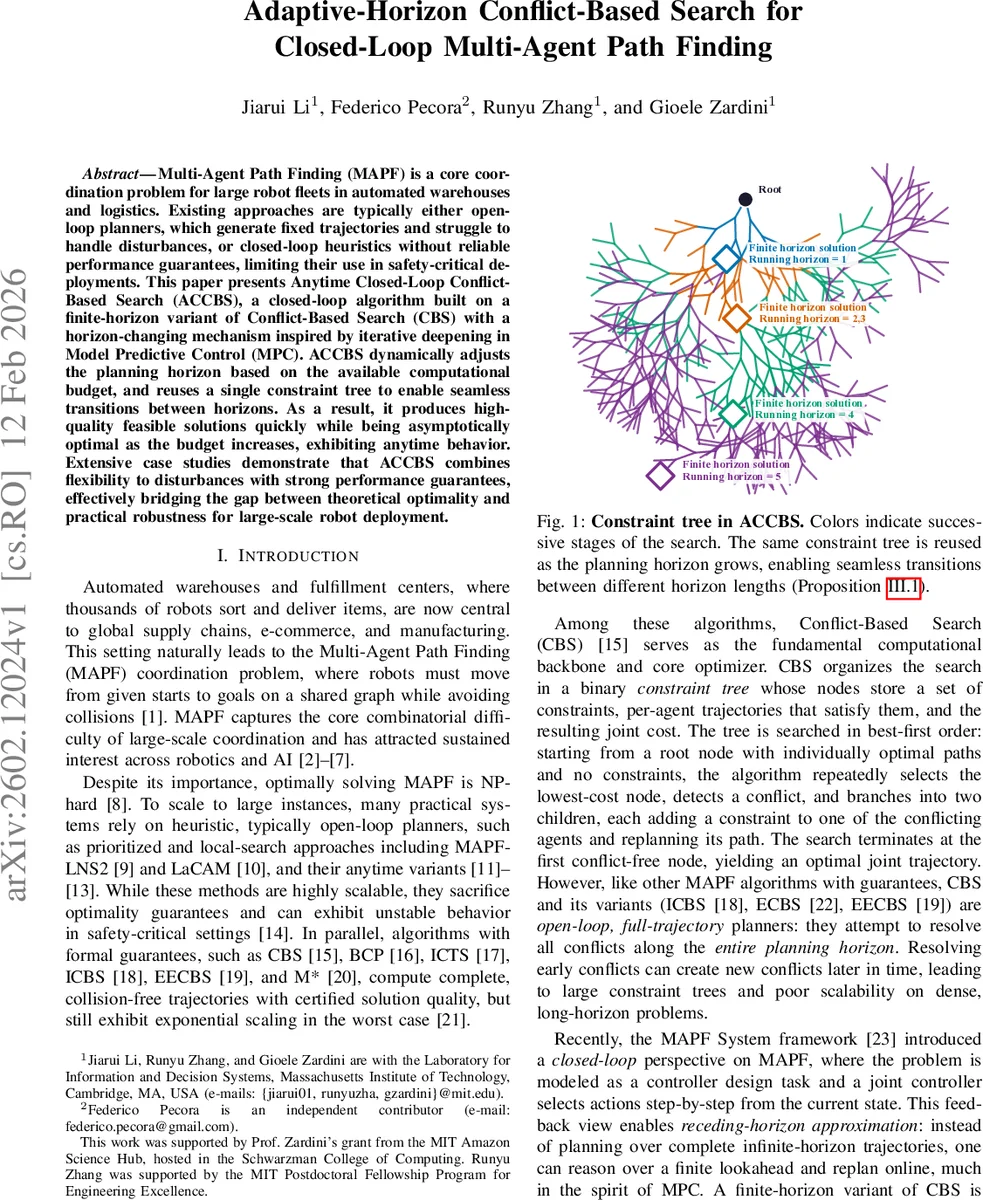
A naïve fixed horizon suffers from a classic trade‑off: small H yields fast computation but myopic decisions that may cause unnecessary detours; large H captures global interactions but dramatically expands the CBS constraint tree, making the search intractable. ACCBS resolves this dilemma by employing an “active prefix” strategy together with constraint‑tree reuse. The algorithm starts with a modest horizon hᵣ (the active prefix) to guarantee a low‑latency feasible move. While time remains in the control cycle and hᵣ < Hₘₐₓ, it incrementally deepens the horizon by one step, reusing the previously built constraint tree. Nodes already explored for a smaller horizon remain valid; only additional constraints and deeper expansions are added. This iterative‑deepening approach yields an anytime behavior: with a tighter time budget the algorithm provides a quick, feasible solution; with more time it progressively improves solution quality, converging to the optimal infinite‑horizon CBS solution.
Theoretical contributions include: Lemma III.1, proving that the cost is non‑decreasing as the horizon expands; Proposition III.1, establishing that reusing the constraint tree does not affect optimality; and Theorem III.2, which guarantees completeness (a solution is eventually found if one exists) and asymptotic optimality (the solution cost converges to the optimal infinite‑horizon cost as the budget grows). Thus ACCBS retains the formal guarantees of CBS while operating in a receding‑horizon, closed‑loop fashion.
Extensive experiments were conducted on three families of grid maps: small empty maps, random dense maps, and large realistic warehouse layouts. Instances ranged from 10 to 100 agents with varying densities. ACCBS was compared against classic CBS, ECBS, MAPF‑LNS, LaCAM, and other state‑of‑the‑art planners. Results show that for a fixed per‑step computation budget (e.g., 0.5 s), ACCBS solves larger instances than any competing method, achieves 10‑30 % lower sum‑of‑costs, and maintains a success rate above 90 % even in highly congested scenarios. Moreover, the incremental horizon expansion incurs only modest additional runtime, preserving real‑time feasibility. In disturbance experiments where agents experience unexpected delays, ACCBS quickly replans and avoids collisions, whereas open‑loop planners often fail or produce unsafe trajectories.
In summary, ACCBS introduces a novel synthesis of finite‑horizon CBS, MPC‑style horizon adaptation, and constraint‑tree reuse. It delivers a practical closed‑loop MAPF solution that is both computationally efficient and equipped with rigorous performance guarantees, making it a compelling choice for safety‑critical, large‑scale robot deployments in modern logistics environments.
Comments & Academic Discussion
Loading comments...
Leave a Comment