TreeLoc: 6-DoF LiDAR Global Localization in Forests via Inter-Tree Geometric Matching
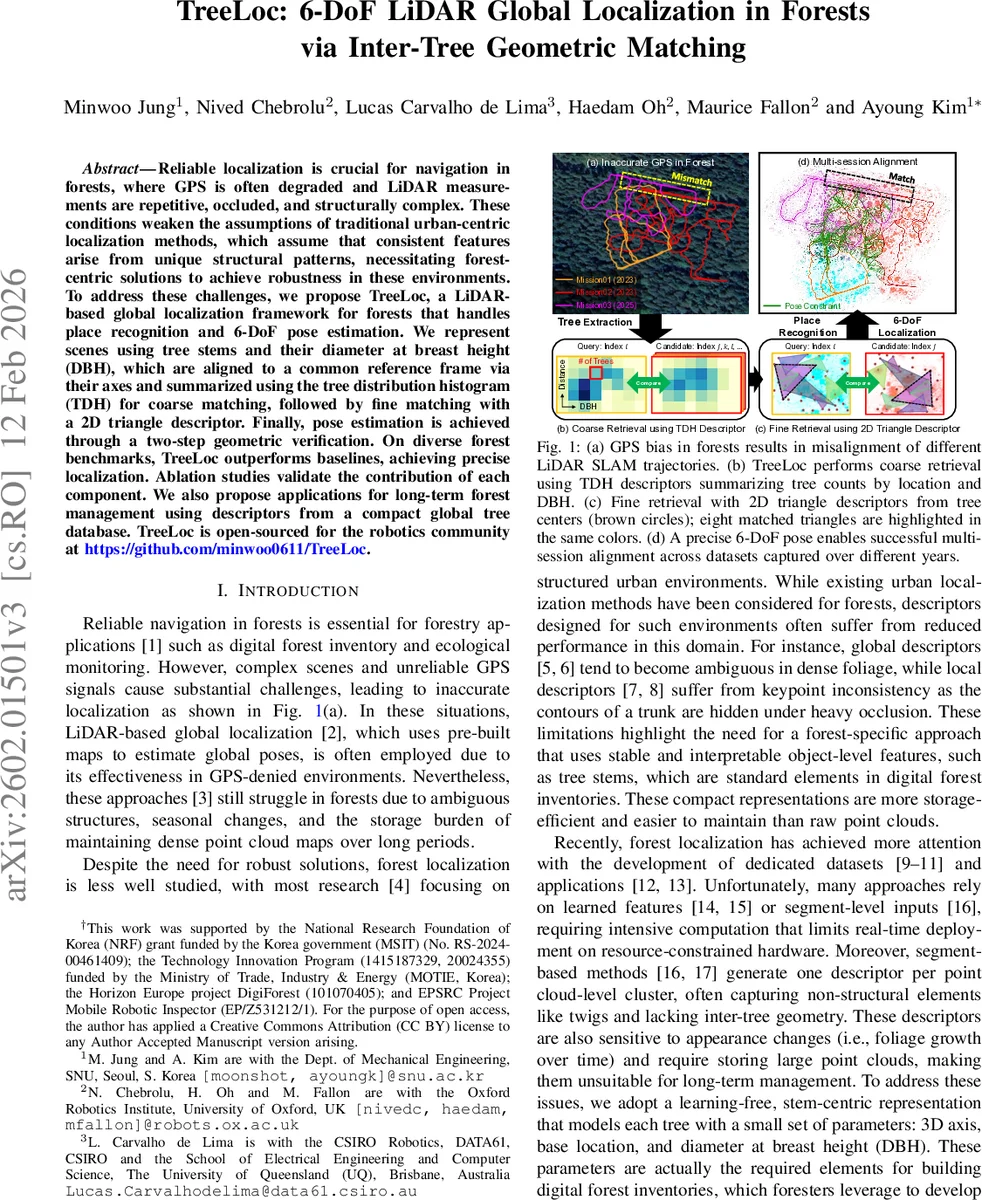
Reliable localization is crucial for navigation in forests, where GPS is often degraded and LiDAR measurements are repetitive, occluded, and structurally complex. These conditions weaken the assumptions of traditional urban-centric localization methods, which assume that consistent features arise from unique structural patterns, necessitating forest-centric solutions to achieve robustness in these environments. To address these challenges, we propose TreeLoc, a LiDAR-based global localization framework for forests that handles place recognition and 6-DoF pose estimation. We represent scenes using tree stems and their Diameter at Breast Height (DBH), which are aligned to a common reference frame via their axes and summarized using the tree distribution histogram (TDH) for coarse matching, followed by fine matching with a 2D triangle descriptor. Finally, pose estimation is achieved through a two-step geometric verification. On diverse forest benchmarks, TreeLoc outperforms baselines, achieving precise localization. Ablation studies validate the contribution of each component. We also propose applications for long-term forest management using descriptors from a compact global tree database. TreeLoc is open-sourced for the robotics community at https://github.com/minwoo0611/TreeLoc.
💡 Research Summary
TreeLoc addresses the long‑standing challenge of global localization in dense forest environments where GPS signals are unreliable and LiDAR scans are highly repetitive, occluded, and structurally complex. Instead of relying on traditional urban‑centric features such as corners, edges, or learned point‑cloud descriptors, the authors propose a learning‑free, object‑centric pipeline that exploits the inherent stability of tree stems and their Diameter at Breast Height (DBH). The method consists of three major stages: (1) tree reconstruction, (2) place recognition using a dual‑descriptor scheme, and (3) 6‑DoF pose estimation through a two‑step geometric verification.
Tree reconstruction is performed on sliding‑window aggregates of raw LiDAR scans. By feeding these aggregates to the RealtimeTrees algorithm, the system extracts individual tree instances and estimates for each tree a 3‑D axis orientation, a 3‑D stem center, the DBH (via a circular fit), and the ground‑intersection point (base). These four parameters are compact enough to serve as a digital forest inventory while preserving the geometric relationships needed for localization.
Because viewpoint changes introduce roll and pitch variations that distort 2‑D projections of tree centers, the authors first align each scene to a common reference direction using the tree axes. A RANSAC‑based least‑squares optimization finds a rotation R_A that aligns all tree axes to the global vertical (e_z). This correction removes roll and pitch while deliberately preserving yaw, ensuring that subsequent 2‑D projections are consistent across different viewpoints.
Coarse place recognition uses the Tree Distribution Histogram (TDH). Each tree’s 2‑D radial distance from the scene origin and its DBH are binned into a 5 × 8 grid, yielding a 40‑dimensional histogram. After a simple 2 × 2 smoothing, the χ² distance between histograms provides a fast, low‑dimensional similarity measure. The top‑100 candidates are passed to the fine stage.
Fine place recognition employs a 2‑D triangle descriptor. All unordered triples of projected tree centers are formed; the three side lengths are sorted and hashed to produce a key. Each scene stores its keys in a hash table. The similarity between a query and a candidate is the cardinality of the intersection of their key sets. This integer‑lookup approach is highly discriminative and robust to rotation and translation, allowing the system to narrow the candidate set to the ten most promising matches.
Geometric verification and 6‑DoF pose estimation proceeds in two steps. First, matched triangle centroids provide a planar SE(2) transformation (R_c, t_c) via an SVD‑based alignment. Second, the already planar‑aligned tree centers and their base heights are used to estimate a 4‑DoF transform (planar rotation + translation + vertical offset). Finally, the roll‑pitch correction rotation R_A obtained earlier is incorporated, yielding a full 6‑DoF pose (R = R_yaw·R_A, t). Notably, no additional point‑cloud registration (e.g., ICP) or learned features are required.
The authors evaluate TreeLoc on several publicly available forest datasets that span multiple seasons and years. Compared to state‑of‑the‑art global descriptors (Scan Context, RING++) and local descriptors (STD, BTC), TreeLoc achieves a Recall@1 of over 90 % and mean positional errors below 0.35 m with rotation errors around 2°. Memory consumption is reduced by three to four orders of magnitude (sub‑megabyte descriptors versus hundreds of megabytes for dense point‑cloud maps). The average inference time is ~48 ms on a CPU, demonstrating real‑time capability on resource‑constrained platforms.
Ablation studies confirm the importance of each component: removing the roll‑pitch correction drops recall to ~60 %; using only TDH (without the triangle descriptor) reduces precision dramatically; and omitting the 4‑DoF refinement inflates pose errors by a factor of 1.8.
Limitations are acknowledged: the approach depends on reliable tree extraction, which may fail in extremely sparse forests or on very steep terrain where base height estimation is noisy. In highly dense canopies, the number of triangle combinations grows rapidly, potentially increasing memory usage for the hash tables.
In conclusion, TreeLoc introduces a novel, learning‑free, geometry‑driven framework that leverages stable, interpretable tree‑level features for robust global localization in forests. The method bridges the gap between digital forest inventory data and robotic navigation, offering a compact, fast, and accurate solution. Future work will explore integration of elevation models, multi‑modal sensor fusion (e.g., visual‑inertial), and extensions to aerial‑ground collaborative mapping to further enhance robustness in challenging forest terrains.
Comments & Academic Discussion
Loading comments...
Leave a Comment