Chemo Hydrodynamic Transceivers for the Internet of Bio-Nano Things, Modeling the Joint Propulsion Transmission trade-off
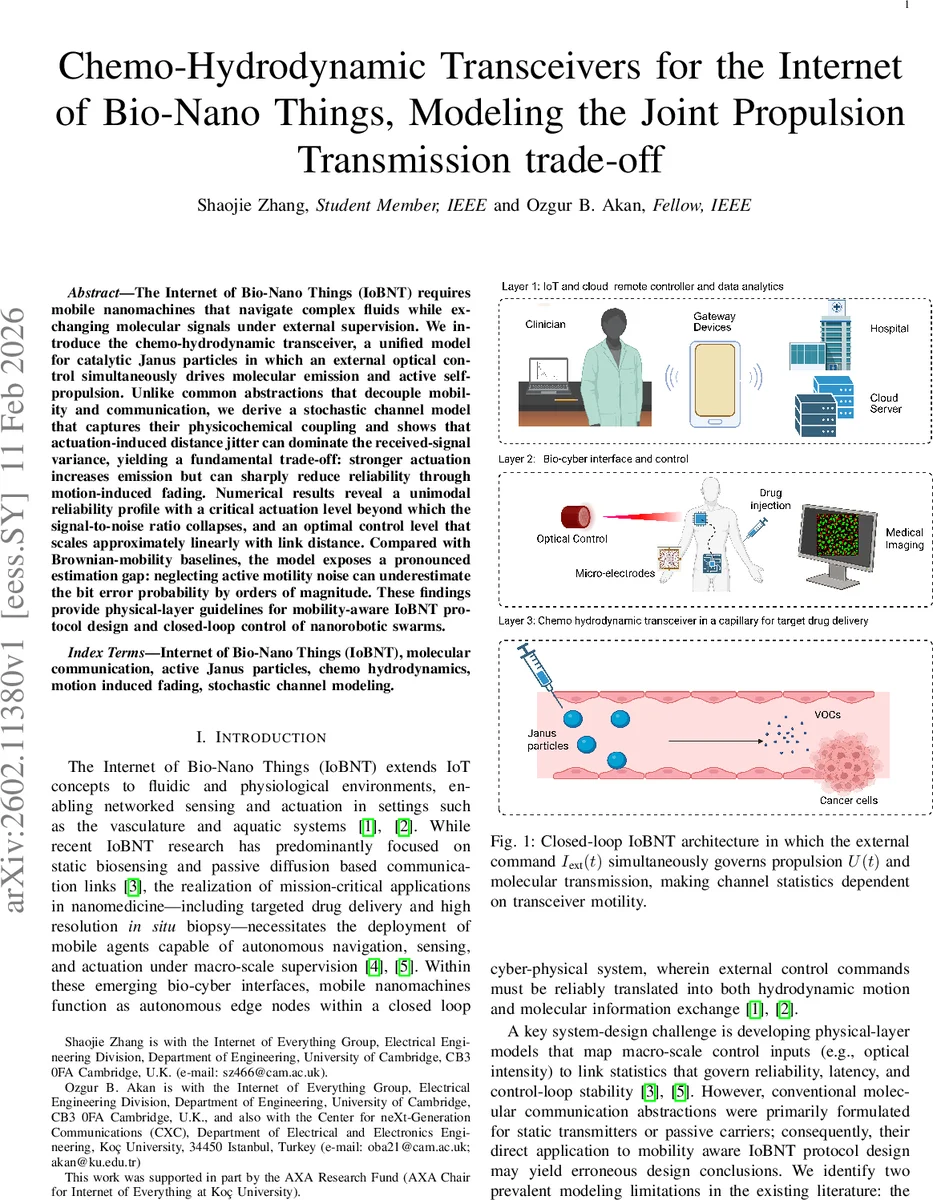
The Internet of Bio-Nano Things (IoBNT) requires mobile nanomachines that navigate complex fluids while exchanging molecular signals under external supervision. We introduce the chemo-hydrodynamic transceiver, a unified model for catalytic Janus particles in which an external optical control simultaneously drives molecular emission and active self-propulsion. Unlike common abstractions that decouple mobility and communication, we derive a stochastic channel model that captures their physicochemical coupling and shows that actuation-induced distance jitter can dominate the received-signal variance, yielding a fundamental trade-off: stronger actuation increases emission but can sharply reduce reliability through motion-induced fading. Numerical results reveal a unimodal reliability profile with a critical actuation level beyond which the signal-to-noise ratio collapses, and an optimal control level that scales approximately linearly with link distance. Compared with Brownian-mobility baselines, the model exposes a pronounced estimation gap: neglecting active motility noise can underestimate the bit error probability by orders of magnitude. These findings provide physical-layer guidelines for mobility-aware IoBNT protocol design and closed-loop control of nanorobotic swarms.
💡 Research Summary
The paper introduces a unified physical‑layer model for catalytic Janus nanomachines that simultaneously perform self‑propulsion and molecular signal emission under a single external optical control signal, I_ext(t). By linking the surface reaction rate to both the slip velocity that drives diffusiophoretic propulsion and the production rate of the information carrier (species B), the authors derive linear control‑to‑propulsion (U = K_control·I_ext) and control‑to‑emission (q = κ_em·I_ext) relationships.
To capture the stochastic nature of nanoscale motion, the authors embed these deterministic gains into an active Brownian motion framework. In a two‑dimensional planar setting, the particle’s position and orientation obey overdamped Langevin equations with translational diffusion D_t and rotational diffusion D_r. Assuming a piecewise‑constant control during each symbol interval, they obtain a closed‑form expression for the axial displacement variance σ_x²(T) = 2 D_t T + U₀² D_r⁻² (e^{‑D_r T}+D_r T‑1), where U₀ = K_control·I. This variance grows quadratically with the control amplitude, reflecting motion‑induced distance jitter.
At the receiver, a far‑field quasi‑steady concentration model is used. The instantaneous separation is approximated as R(t) ≈ d – x(t), leading to a concentration at the receiver c_R(t) ≈ G_ch·I/(d – x(t)). Linearizing around the mean distance yields an observation model Y = H₀·I + Z_m, where the noise Z_m consists of two components: (i) a Poisson‑like term proportional to I (chemical reaction noise) and (ii) a term proportional to I²·σ_x²(T) (position‑jitter‑induced noise). Consequently, the total noise variance takes the form σ_Y² = α·I + β·I³, i.e., it scales cubically with the control intensity at high actuation levels.
Using binary signaling, the authors derive closed‑form expressions for the signal‑to‑noise ratio (SNR) and the bit‑error probability (BEP) via the Q‑function. The SNR is a non‑monotonic function of I: at low I the signal is weak, while at high I the jitter term dominates, causing a rapid SNR collapse. An optimal actuation level I_opt exists, obtained analytically by differentiating the SNR expression. The result shows I_opt scales approximately linearly with the link distance d (I_opt ≈ c·d), where the constant c depends on the propulsion gain, diffusion coefficients, and noise parameters. The analysis also reveals a constraint on the symbol duration T: it must be larger than the rotational relaxation time τ_r = 1/D_r to ensure independent orientation across symbols; otherwise, residual orientation memory degrades the reliability estimates.
A key contribution is the quantification of an “estimation gap”: when the active motion‑induced jitter is ignored (i.e., using a conventional Brownian‑only model), the predicted BEP can be orders of magnitude lower than the true value, especially in regimes of strong propulsion. Stochastic particle‑based simulations validate the analytical results and illustrate the dramatic increase in error probability when the control intensity exceeds a critical threshold.
The paper concludes with several design guidelines for IoBNT systems: (1) propulsion and transmission must be jointly optimized rather than treated independently; (2) the optimal control intensity should be adapted to the communication distance; (3) symbol times must be chosen to exceed the rotational decorrelation time; and (4) physical‑layer models that incorporate motion‑induced fading are essential for accurate link budgeting, rate selection, and closed‑loop swarm control. Overall, the work provides a rigorous foundation for mobility‑aware molecular communication and paves the way for reliable, controllable nanorobotic swarms in biomedical and environmental applications.
Comments & Academic Discussion
Loading comments...
Leave a Comment