Learning Force-Regulated Manipulation with a Low-Cost Tactile-Force-Controlled Gripper
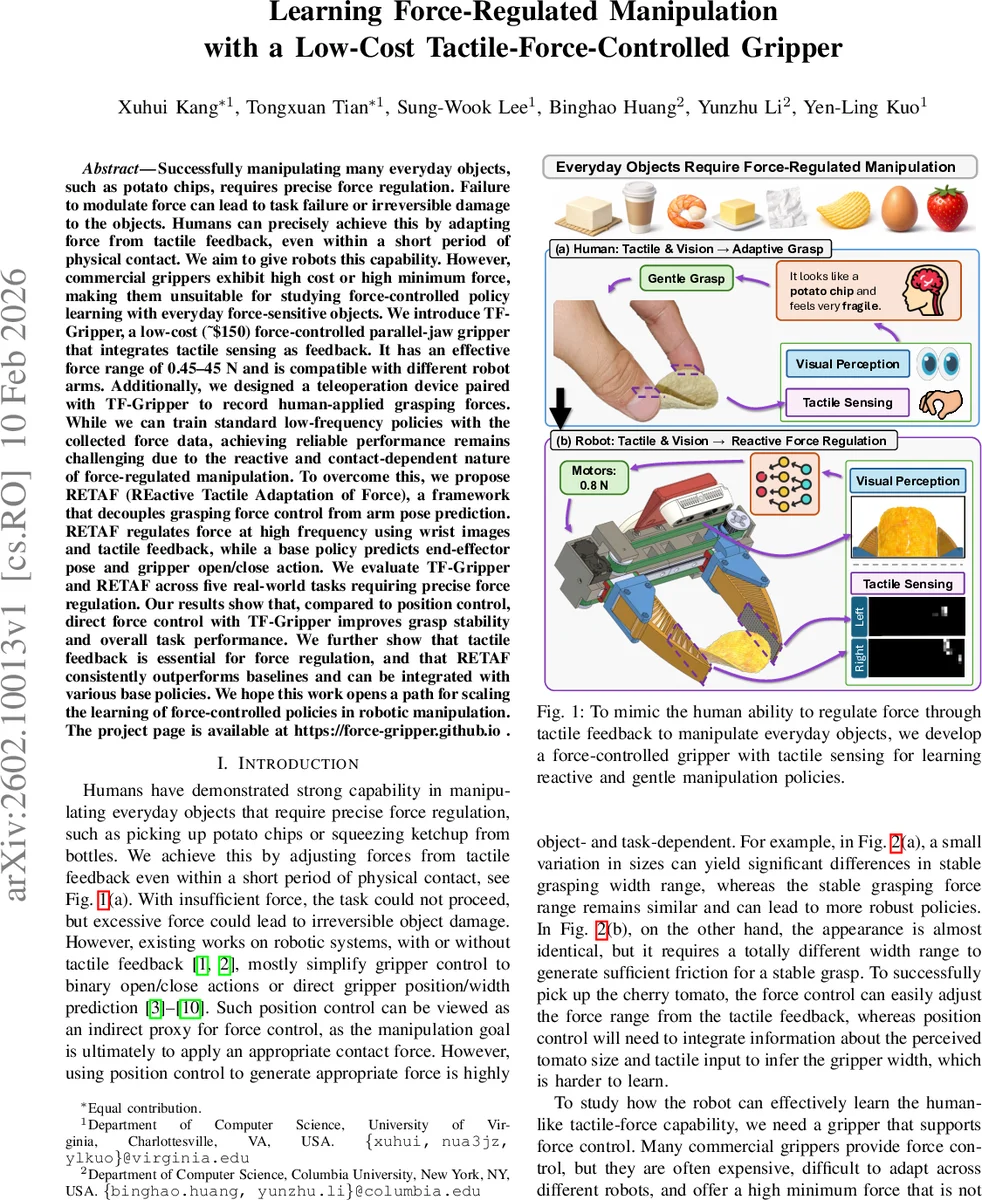
Successfully manipulating many everyday objects, such as potato chips, requires precise force regulation. Failure to modulate force can lead to task failure or irreversible damage to the objects. Humans can precisely achieve this by adapting force from tactile feedback, even within a short period of physical contact. We aim to give robots this capability. However, commercial grippers exhibit high cost or high minimum force, making them unsuitable for studying force-controlled policy learning with everyday force-sensitive objects. We introduce TF-Gripper, a low-cost (~$150) force-controlled parallel-jaw gripper that integrates tactile sensing as feedback. It has an effective force range of 0.45-45N and is compatible with different robot arms. Additionally, we designed a teleoperation device paired with TF-Gripper to record human-applied grasping forces. While standard low-frequency policies can be trained on this data, they struggle with the reactive, contact-dependent nature of force regulation. To overcome this, we propose RETAF (REactive Tactile Adaptation of Force), a framework that decouples grasping force control from arm pose prediction. RETAF regulates force at high frequency using wrist images and tactile feedback, while a base policy predicts end-effector pose and gripper open/close action. We evaluate TF-Gripper and RETAF across five real-world tasks requiring precise force regulation. Results show that compared to position control, direct force control significantly improves grasp stability and task performance. We further show that tactile feedback is essential for force regulation, and that RETAF consistently outperforms baselines and can be integrated with various base policies. We hope this work opens a path for scaling the learning of force-controlled policies in robotic manipulation. Project page: https://force-gripper.github.io .
💡 Research Summary
This paper addresses the challenge of force‑regulated manipulation of everyday, delicate objects by introducing a low‑cost tactile‑force‑controlled gripper (TF‑Gripper) and a novel policy framework (RETAF) that decouples force regulation from arm‑pose prediction. Commercial force‑controlled grippers are either expensive (>$2,000) or have high minimum forces, making them unsuitable for tasks such as picking up potato chips or squeezing ketchup bottles. TF‑Gripper costs roughly $150, uses two Dynamixel XL430‑W250‑T actuators driving parallel fingers via a timing‑belt transmission, and achieves a linear current‑to‑force relationship over 0.45–45 N with ≈0.2 N resolution. The fingers are equipped with soft pads and thin piezoresistive FlexiTact arrays (32 × 12) that provide contact‑area geometry and pressure information. A 3‑D‑printed frame and interchangeable ISO‑9409‑1‑A50 adapters enable easy mounting on a variety of robots (Franka, UR5, KUKA, etc.).
To collect high‑quality human demonstrations that include explicit grasping force, the authors design a teleoperation device costing less than $100. The device mirrors the gripper’s actuation: two finger‑rings are attached to the same Dynamixel motors, which provide spring‑like resistance and allow the operator’s applied force to be measured via motor current. This force signal is calibrated and streamed to the robot, reproducing the demonstrated force in real time while a separate VR controller or SpaceMouse handles end‑effector pose teleoperation.
The core learning contribution is RETAF (Reactive Tactile Adaptation of Force). Traditional manipulation policies predict a combined action vector consisting of arm pose and gripper command (often width) at low frequencies (1–10 Hz). Such a formulation fails for force‑regulated tasks because stable force regulation requires reaction times ≤ 50 ms to transient tactile events (e.g., slip). RETAF splits the problem: a base policy, which can be any existing low‑frequency pose‑prediction model (Diffusion Policy, Vision‑Language‑Action, etc.), predicts the 6‑DoF arm pose and a binary open/close command. In parallel, a high‑frequency (30 Hz) force‑adaptation policy consumes wrist‑mounted RGB‑D images and tactile sensor readings to output the desired motor current (or PWM) that enforces the target grasping force. By limiting tactile processing to the force‑adaptation loop, the system avoids over‑loading the base policy and ensures rapid, contact‑driven adjustments.
The authors evaluate TF‑Gripper and RETAF on five real‑world tasks that demand precise force control: (1) picking up potato chips, (2) grasping fresh tomatoes, (3) grasping softened (2‑day‑old) tomatoes, (4) lifting a plastic cup, and (5) handling thin paper sheets. For each task, 50 human demonstrations were recorded. Experiments compare (a) position‑control (gripper width) baseline, (b) direct force‑control without tactile feedback, and (c) RETAF integrated with several base policies. Metrics include grasp stability (absence of slip), object damage, overall task success rate, and mean force error. Results show that direct force‑control significantly outperforms position‑control, reducing slip and damage rates. However, without tactile feedback the force controller’s performance degrades, highlighting the necessity of tactile sensing. RETAF consistently improves success rates across all base policies, achieving up to a 35 % absolute increase in tasks where force regulation is critical (e.g., tomato handling reached > 90 % success). The high‑frequency force adaptation maintains an average force error below 0.15 N and, with temperature compensation, limits drift to under 4 % over extended operation.
The paper contributes three main advances: (1) a cheap, open‑source gripper capable of fine‑grained force regulation and integrated tactile perception; (2) a teleoperation interface that directly records human‑applied grasping force, eliminating indirect inference methods; and (3) the RETAF framework that cleanly separates high‑frequency force regulation from low‑frequency pose planning, enabling any existing pose‑prediction model to be upgraded for force‑regulated tasks. Limitations include focus on single‑object, single‑gripper contacts and sensitivity to lighting or tactile noise. Future work could explore multi‑object manipulation, domain‑randomized simulation pre‑training, richer tactile modalities, and long‑duration adaptive control under varying temperature or battery conditions. Overall, TF‑Gripper and RETAF demonstrate that affordable hardware combined with a principled policy decomposition can endow robots with human‑like, delicate force regulation, opening pathways for service robots and manufacturing systems that must handle fragile items safely and efficiently.
Comments & Academic Discussion
Loading comments...
Leave a Comment