QoS Identifier and Slice Mapping in 5G and Non-Terrestrial Network Interconnected Systems
The interconnection of 5G and non-terrestrial networks (NTNs) has been actively studied to expand connectivity beyond conventional terrestrial infrastructure. In the 3GPP standardization of 5G systems, the 5G Quality of Service (QoS) Identifier (5QI) is defined to characterize the QoS requirements of different traffic requirements. However, it falls short in capturing the diverse latency, capacity, and reliability profiles of NTN environments, particularly when NTNs are used as backhaul. Furthermore, it is difficult to manage individual traffic flows and perform efficient resource allocation and routing when a large number of 5G traffic flows are present in NTN systems. To address these challenges, we propose an optimization framework that enhances QoS handling by introducing an NTN QoS Identifier (NQI) and grouping 5G traffic into NTN slices based on similar requirements. This enables unified resource control and routing for a large number of 5G flows in NTN systems. In this paper, we present the detailed procedure of the proposed framework, which consists of 5QI to NQI mapping, NTN traffic to NTN slice mapping, and slice-level flow and routing optimization. We evaluate the framework by comparing multiple mapping schemes through numerical simulations and analyze their impact on overall network performance.
💡 Research Summary
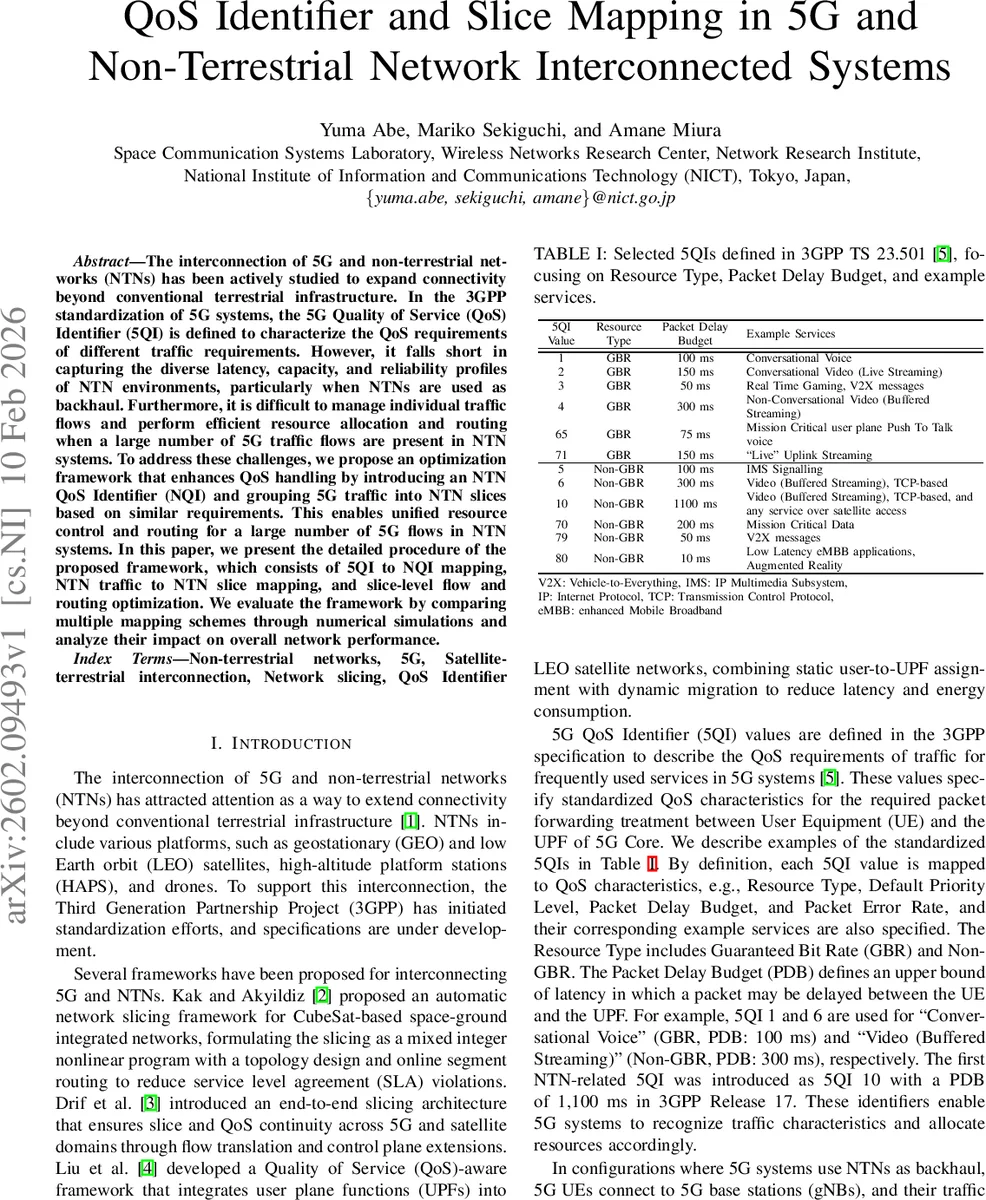
The paper addresses the emerging need to interconnect 5G terrestrial networks with non‑terrestrial networks (NTNs) such as LEO, GEO satellites, HAPS and drones. While 3GPP defines a set of 5G Quality of Service Identifiers (5QIs) that specify parameters like Packet Delay Budget (PDB), Guaranteed Bit Rate (GBR) and Packet Error Rate, these identifiers were designed for terrestrial links and cannot capture the wide latency, capacity and reliability variations typical of satellite links. For example, a single 5QI 10 (PDB 1.1 s) is far too coarse to differentiate between a 30 ms LEO hop and a 500 ms GEO hop. Consequently, when NTNs are used as backhaul for massive numbers of 5G flows, the network operator faces two major problems: (i) the inability to map traffic to appropriate resources, and (ii) prohibitive complexity in managing each individual flow for routing and resource allocation.
To overcome these limitations the authors propose a three‑stage optimization framework that introduces (a) an NTN‑specific QoS Identifier (NQI) and (b) the concept of an “NTN slice” that aggregates traffic with similar QoS requirements. The framework consists of:
-
5QI‑to‑NQI Mapping – Each gNB applies a discrete mapping function f j(·) that converts the 5QI of every incoming 5G flow into an NQI. The mapping can be different per gNB, allowing local adaptation to satellite visibility, link quality, or service‑level agreements. Flows that receive the same NQI at a given gNB are aggregated into a single NTN traffic flow, dramatically reducing the number of entities that later need to be routed.
-
NTN Traffic‑to‑Slice Mapping – An “NTN slice” is defined as a set of aggregated NTN flows that share the same destination (a data network) and one or more NQIs. The first satellite that a user contacts is called the slice‑edge satellite. Each slice‑edge satellite runs its own mapping g ℓ(·) that assigns a traffic flow to a slice index j. Consequently, each slice S ℓ,j contains all flows with NQIs in a set Q ℓ,j and destined for the same ground station. The maximum number of slices that can be created on a satellite equals |D| × |Q ℓ|, where D is the set of possible destinations.
-
Slice‑Level Flow and Routing Optimization – The authors formulate a mixed‑integer linear program (MILP) that simultaneously decides (i) which links each slice will use (binary variables x i,e), (ii) how much total flow b i is allocated to slice i, and (iii) how that flow is split among the selected links (continuous variables f i,e). The MILP incorporates eight constraints that model link capacity, flow conservation at slice‑edge satellites, intermediate satellites, and destination nodes, as well as loop‑avoidance and single‑feeder‑link usage.
The objective function J balances two performance metrics:
- Flow Gap s f,i = max(0, r s,i − b i), the shortfall between the slice’s requested traffic r s,i and the allocated amount.
- Latency Gap s ℓ,i = max(0, ℓ i − \barℓ(q n,i)), where ℓ i is the end‑to‑end propagation delay of the selected path and \barℓ(q n,i) is the PDB associated with the slice’s NQI.
A weighted sum J = w_f · (∑ s f,i /F) + w_ℓ · (∑ s ℓ,i /L) is minimized, where w_f + w_ℓ = 1 and F, L are normalization constants. By varying the weights, operators can prioritize either throughput (large w_f) or latency (large w_ℓ).
Simulation Setup – The authors evaluate the framework on a hybrid LEO/GEO constellation. Each LEO satellite carries one RF user interface and five optical inter‑satellite/ground‑station interfaces. Users (aircraft, ships, gNBs) generate traffic with a wide range of 5QIs (1–80). Three mapping strategies are examined:
- 1:1 Mapping – Direct 5QI→identical NQI.
- Delay‑Preserving Mapping – Small‑PDB 5QIs are mapped to NQIs with equally small PDBs, protecting latency‑sensitive services.
- Capacity‑Preserving Mapping – High‑bandwidth 5QIs are mapped to NQIs with larger capacity allowances, favoring overall throughput.
The weight pair (w_f, w_ℓ) is varied among (0.8, 0.2), (0.5, 0.5) and (0.2, 0.8) to explore the trade‑off space.
Key Findings
- Delay‑Preserving Mapping dramatically reduces SLA violations for latency‑critical services (e.g., real‑time gaming, V2X) but leads to larger flow gaps on slices that exceed the limited satellite capacity.
- Capacity‑Preserving Mapping achieves higher overall flow satisfaction but incurs significant latency overshoots, making it unsuitable for strict delay‑sensitive applications.
- The balanced weight configuration (0.5, 0.5) yields the lowest total cost J, indicating that a mixed priority policy can achieve a reasonable compromise between throughput and latency.
- Slice‑level aggregation reduces the number of decision variables in the MILP by orders of magnitude, making the optimization tractable for realistic constellation sizes.
Implications and Future Work
The study demonstrates that a dedicated NTN QoS abstraction (NQI) combined with slice‑based traffic aggregation can overcome the granularity gap of 5QI in satellite‑augmented networks. It enables operators to tailor QoS handling to the highly variable satellite environment while keeping the optimization problem manageable. However, the MILP approach may still be too heavyweight for real‑time network control. The authors suggest future research directions: (i) online adaptive 5QI‑NQI mapping algorithms that react to instantaneous link states, (ii) distributed or reinforcement‑learning‑based routing heuristics for large‑scale deployments, and (iii) hierarchical management frameworks that support dynamic slice re‑configuration as satellite topology evolves.
Overall, the paper provides a solid analytical foundation and a practical optimization framework for integrating 5G services with NTNs, paving the way for more reliable, low‑latency, and efficient satellite‑backhauled 5G networks.
Comments & Academic Discussion
Loading comments...
Leave a Comment