Robust and Gain-Scheduling ${\cal H}_2$ Control Techniques for LFT Uncertain and Parameter-Dependent Systems
This paper addresses the robust ${\cal H}_2$ synthesis problem for linear fractional transformation (LFT) systems subject to structured uncertainty (parameter) and white-noise disturbances. By introducing an intermediate matrix variable, we derive co…
Authors: Fen Wu
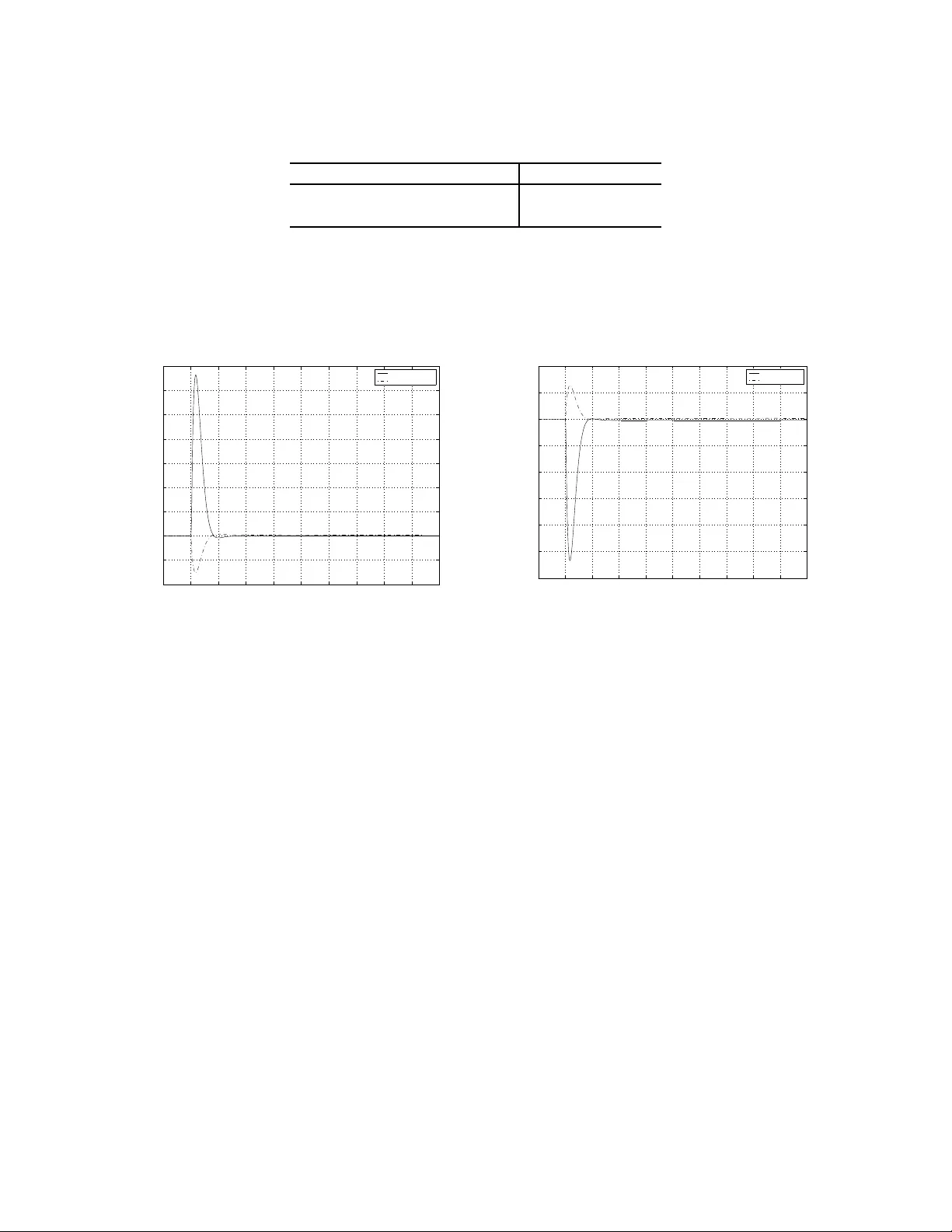
Robust and Gain-Sc hedulin g H 2 Con trol T ec hnique s for LFT Uncertain and P arameter-Dep enden t Systems F en W u ∗ Dept. of Mec ha nical and Aerospace Engineering North Carolina State Univ ersity Raleigh, NC 27695 F ebruary 5, 202 6 Abstract This pap e r addresses the robust H 2 synthesis problem for linea r fractio nal tra nsformation (LFT) systems sub ject t o structured uncertaint y (parameter) and white-noise disturbances. B y int r o ducing an intermediate matrix v a r iable, we derive con vex synthesis conditions in ter ms of linear matrix inequalities (LMIs) that enable b oth r obust and gain-sc heduled controller design for parameter- dep endent systems. The prop osed framework preserv es the classical white-noise and impulse-respo nse in ter pretation of the H 2 criterion while providing certified r obustness guarantees, thereby extending o ptimal H 2 control beyond the linear time-inv aria nt setting. Nu- merical and a pplication examples demons tr ate tha t the resulting robust H 2 controllers achiev e significantly reduced conse rv a tism and improv ed disturbance rejection compar ed with co nven- tional robust H ∞ -based designs. Keyw ords: Linear fractional transformation system; stru ctured uncertain ty (parameter); H 2 p er- formance; robus t and gain-sc h ed uling con trol; LMIs . 1 In tro du ction Robust con trol metho dologies such as H ∞ con trol and µ -synthesis ha ve b ecome standard to ols for the d esign of complex systems op erating un der un certaint y [8, 7, 22, 3]. These app roac hes emphasize w orst-case p erformance and guarante e robust s tabilit y and distu rbance attenuat ion in the presence of structured or unstructured uncertain ties. When an uncertain system T is robustly stable, p erformance is t ypically assessed by the L 2 -gain f r om distur b ance signals to regulated outputs, yielding a conserv ativ e but reliable c haracterization of system b ehavio r under adv ersarial conditions. Ho w eve r , th e strong emphasis on w orst-case robustness inherent in H ∞ -based d esign often leads to unnecessarily co ns erv ativ e p erformance, particularly i n applications where disturbances are sto chas- tic in nature rather than adv ersarial. When distur bances are b etter mo d eled as white noise pr o- cesses, the H 2 norm provides a more meanin gfu l p erform an ce metric, as it quantifies the exp ected ∗ E-mail: fwu@ncsu.ed u , Phone: (919) 515-5268. 1 energy of the regulated output rather than the w orst-case a mp lification [22]. In contrast, the in- duced L 2 norm und erlying H ∞ con trol effecti vely measures the resp onse to p ersistent sin usoidal disturbances, whic h can significan tly ov erestimate p erformance degradation in many practical s ys- tems. Despite its app ealing in terpretation and w id espread use in linear time-inv ariant (L TI) s ystems, the extension of th e H 2 norm to uncertain and parameter-v aryin g systems remains c hallenging. Early attempts to generalize H 2 p erformance to un certain systems were s h o wn to b e basis d ep endent and computationally demanding [17, 23]. S ubsequent r esearc h h as s ou ght to add ress these limitations b y dev eloping alternativ e f orm ulations of robust H 2 p erformance analysis. F or example, reference [5] pro vid ed analysis results of robu st H 2 p erformance for u ncertain linear systems using multipli- ers. References [9, 10] pro vid ed r igorous int erp retations of robust H 2 measures th at p reserv e the white-noise r ejection p ersp ectiv e. T hese works also demonstrated th at tigh t p erformance b oun ds can b e obtained and that infinite-dimensional conditions may b e reduced to tractable state-space c haracterizations. A comprehen siv e comparison of these robust H 2 measures and their th eoretical prop erties is rep orted in [11]. Reference [6] dev elop ed a rigorous robust H 2 p erformance analy- sis framewo r k based on dualit y theory and basis-function r epresen tations, preserving the classical white-noise interpretatio n wh ile explicitly accounti n g for structur ed uncertain ty . Their results yield tigh t, finite-dimensional s tate-space conditions for computing wo r st-case H 2 p erformance b oun ds and form a theoretical foundation for later m ultiplier- and LMI-based robust H 2 metho ds. In parallel, gain-sc heduling and linear p arameter-v arying (LPV) con trol framew orks ha ve b een extensiv ely in ve stigated as a means to address str uctured parameter v ariations in con trol systems. Quadratic and parameter-dep enden t H 2 and m ixed H 2 / L ∞ p erformance analysis and synthesis tec h niques ha v e b een p rop osed for LPV systems, in cluding fu ll-blo c k multiplier and lo op -sh aping- based metho ds [14], static output-feedbac k designs with guaranteed H 2 p erformance b ounds [21], and gain-sc heduled con trollers accoun ting for inexact scheduling parameter measurement s [15, 1]. Relev an t m ulti-ob jectiv e cont r ol problems ha ve b een add ressed in [23, 16]. Although substan tial adv ances h a v e b een made, cur rent ap p roac hes frequently dep end on r estrictiv e assumptions, incur conserv atism arising fr om in sufficien t distur b ance characte rization, or h andle rob u stness and gain sc hedulin g in a lo osely coup led manner. Motiv ated by these limitations and the later r obust H 2 problem form u lation in [9, 10], this pap er in vest igates robus t and gain-sc heduled H 2 con trol fr om a u nified p ersp ectiv e. Th e ob jectiv e is to explicitly account for uncertain ty wh ile retaining the physic al in terp r etabilit y and p erform ance adv anta ges of th e H 2 criterion. In con trast to classical w orst-case designs, the p rop osed fr amew ork seeks to b alance robustness and av erage p erform an ce by em b edd ing uncertain t y descriptions dir ectly in to the H 2 analysis and synthesis cond itions. This pap er deve lops a unifi ed framew ork for robust and gain-sc hedu led H 2 con trol of uncertain and parameter-dep endent s y s tems, addressing a fund amen tal gap b etw een classical H 2 optimal con trol and rob u st design m etho dologies. By explicitly incorp orating u ncertain t y in to the H 2 p er- formance formulation, th e prop osed appr oac h p r eserv es the p hysical in terpr etation of white-noise disturbance rejection while p ro viding certified robus tn ess guarantees. F or time-v aryin g u ncertain t y and scheduling parameters, finite-dimensional synt h esis conditions are derived that parallel robu st and gain-sc h eduled H ∞ con trol tec hn iques. Cen tral to the prop osed metho d is the introdu ction of an in termediate matrix v ariable and the us e of ideas originally prop osed in [2, 4], whic h enable the deriv ation of con v ex syn thesis co nd itions expressed in terms of trac table LMIs (or PLMIs). The resulting framew ork unifi es classical L TI H ∞ con trol, robu st 2 syn thesis, and LPV gain-sc h eduled designs within a single theoretical setting. In contrast to worst-c ase induced-norm app roac hes, 2 the prop osed m etho dology provides p erformance guarant ees that are b etter aligned with sto c has- tic d isturbance environmen ts and impulse-resp onse ob jectiv es. Sev eral numerical and ap p lication examples are p resen ted to demonstrate that th e prop osed robust H 2 con trol tec hn iques achiev e reduced conserv atism and impr o v ed disturbance rejection when compared with existing robust and gain-sc hedu led H 2 and H ∞ -based metho ds. P arts of this work w ere p reviously rep orted in a preliminary conference p ap er [19]. Notations . R p and R p × q denote real-v alued v ectors of dimens ion p and r eal-v alued matrices of dimension p × q , resp ectiv ely . Th e set of real symmetric n × n matrices is denoted by S n × n , and S n × n + denotes the subset of p ositive definite matrices. A blo c k-diagonal matrix with diagonal blo c ks X 1 , . . . , X p is denoted b y diag { X 1 , . . . , X p } . F or a matrix X ∈ R p × p with elemen ts x ij , diag { X } denotes the vecto r [ x 11 , . . . , x pp ] T , and tr { X } = P p i =1 x ii denotes its trace. F or symmetric m atrices X, Y ∈ S n × n , th e n otation X ≤ Y ( X < Y ) that Y − X is p ositiv e semidefin ite (p ositiv e defin ite). An infinite sequence x := { x 1 , x 2 , . . . } , with x i ∈ R p , is said to b elong to ℓ p 2 if P ∞ i =1 x T i x i < ∞ . The r emaind er of the pap er is organized as follo ws. In Section 2, w e in tro d uce the sys tem mo del, including the linear fractional trans formation (LFT) representa tion of the uncertain plant, and summarize the assumptions on the uncertain t y and system prop erties. Section 3 present s the robu st H 2 state-feedbac k con trol design, includ in g the deriv ation of conv ex s yn thesis conditions and the corresp ondin g controlle r construction. Section 4 extends the results to gain-sc h eduling H 2 output- feedbac k con trol for parameter-dep endent s ystems, with detailed LMI-based syn thesis conditions and con troller reco ve r y . Section 5 pr o vides n um erical examples to illustrate the effectiv eness and adv anta ges of the prop osed metho ds. Finally , Section 6 concludes th e pap er and d iscusses p oten tial directions for fu ture r esearch. 2 Robust H 2 P erformance An alysis Consider an uncertain discrete-time linear system describ ed in linear fractional transformation (LFT) form x ( k + 1) q ( k ) e ( k ) = A B 0 B 1 C 0 D 00 0 C 1 D 10 0 x ( k ) p ( k ) d ( k ) (1) p ( k ) = ∆( k ) q ( k ) (2) where x ( k ) , x ( k + 1) ∈ R n , p ( k ) , q ( k ) ∈ R n p , e ∈ R n e , and d ∈ R n d . All state-space matrices are of compatible dimensions, and the nominal matrix A is assu med to b e stable. The uncertain t y ∆ time-v arying and b elongs to the structured s et ∆ := { diag { δ 1 I m 1 , . . . , δ s I m s , ∆ s +1 , . . . , ∆ s + f } : δ i : ℓ 2 → ℓ 2 , k δ i k ≤ 1 , i = 1 , . . . , s, ∆ s + j : ℓ 2 → ℓ r j × r j 2 , k ∆ s + j k ≤ 1 , j = 1 , . . . , f o , where the ind uced ℓ 2 norm is u s ed, and P s i =1 m i + P f j =1 r j = n p . T o reduce conserv atism in r obust stabilit y and p erf orm ance analysis, w e introd uce the follo wing set of scaling matrices: D = diag D 1 , · · · , D s , d s +1 I r 1 , · · · , d s + f I r f : D i ∈ S m i × m i + , i = 1 , · · · , s , d s + j > 0 , j = 1 , · · · , f 3 By construction, the commutati on pr op ert y D ∆ = ∆ D holds for an y ∆ ∈ ∆ and D ∈ D . F ollo win g [9], defining the family of signal sets W η := f ∈ ℓ p 2 : Z s 0 f ( ω ) f ⋆ ( ω ) dω 2 π − s k f k 2 2 pπ I p ∞ < η , where k · k ∞ denotes the maxim um absolute v alue of the matrix elemen ts o v er ω ∈ [0 , 2 π ], k f k denotes the ℓ p 2 norm of f , and f ( ω ) denotes the F ourier transform of f . F or a (not necessarily linear or time-in v arian t) system T : ℓ p 2 → ℓ q 2 , defin e k T k W η := sup f ∈W η , k f k =1 k T f k . It was then shown in [9] that an appropr iate extension of the H 2 norm to suc h systems is giv en by k T k 2 := √ p lim η → 0 k T k W η . (3) This defin ition captures the wh ite-noise resp onse c haracteristics of T and is adopted throughout this pap er. F or systems with time-v arying uncertaint y , the robust H 2 p erformance of (1)-(2) was analyzed in the frequency domain in [9]. S p ecifically , the existence of a scaling matrix X ∈ D and a frequency- dep end en t m atrix fun ction Y ( e j ω ) s atisfying M ⋆ ( e j ω ) X 0 0 I M ( e j ω ) − X 0 0 Y ( e j ω ) < 0 (4) Z 2 π 0 tr Y ( e j ω ) dω 2 π < γ 2 (5) ensures a robu s t H 2 p erformance b ound γ , wh er e M ( e j ω ) = D 00 D 10 + C 0 C 1 ( e j ω I − A ) − 1 B 0 . F ollo win g the approac h in [10], these fr equ ency-domain conditions can b e conv erted in to an equiv- alen t state-space formulation. In particular, robust H 2 p erformance is guarant eed if there exist p ositiv e-definite P − , P + and Q , together w ith a scaling matrix X ∈ D , suc h that P − X I − A B 0 C 0 D 00 C 1 D 10 P − X A T C T 0 C T 1 B T 0 D T 00 D T 10 > 0 (6) P + X I − A B 0 C 0 D 00 C 1 D 10 P + X A T C T 0 C T 1 B T 0 D T 00 D T 10 > 0 (7) Q B T 1 B 1 P + − P − > 0 (8) tr( Q ) < γ 2 . (9) These conditions provide a sta te-space c haracterizatio n of robust H 2 p erformance that parallels classical robust H ∞ results, thereby extendin g th e app licabilit y of r ob u st control theory to energy- based p erformance m easures. Although th e robus t H 2 analysis problem is no w w ell und er s to o d, there remains comparativ ely limited work on the synthesis of robu st con trollers b ased explicitly on the robu s t H 2 criterion. 4 3 Robust H 2 State-F eedbac k Con trol Consider the un certain d iscrete-time linear system x ( k + 1) q ( k ) e ( k ) y ( k ) = A B 0 B 1 B 2 C 0 D 00 0 D 02 C 1 D 10 0 D 12 C 2 D 20 D 21 0 x ( k ) p ( k ) d ( k ) u ( k ) (10) p ( k ) = ∆( k ) q ( k ) , (11) where x ( k ) ∈ R n , u ∈ R n u , y ∈ R n y , and other v ariables ha v e compatible d imensions. W e assume the follo wing: (A1) ( A, B 2 ) is stabilizable and ( A, C 2 ) is detectable, (A2) D 01 = and D 11 = 0. In this section, w e assu m e f ull-state av ailabilit y ( y = x ) and seek a state-feedbac k con troller u ( k ) = F x ( k ) (12) that minimizes th e r obust H 2 norm of th e closed-lo op system. The closed-lo op dynamics are x ( k + 1) q ( k ) e ( k ) = A + B 2 F B 0 B 1 C 0 + D 02 F D 00 0 C 1 + D 12 F D 10 0 x ( k ) p ( k ) d ( k ) p ( k ) = ∆( k ) q ( k ) . T o der ive a tractable synthesis condition, w e in tro d uce an inte rm ediate matrix V as in [2, 4 ], wh ic h replaces P − and P + , p ro viding common v ariables in the analysis inequalities an d decoupling the state m atrix A from P − , P + . Using this transformation, the robust H 2 state-feedbac k synthesis is giv en as follo w s. Theorem 1 The close d-lo op system is r obustly stabilizable by a state-fe e db ack c ontr ol ler and achieves a r obust H 2 norm less than γ if ther e exist p ositive-definite matric es P − , P + ∈ S n × n + , Q ∈ S n d × n d + , a sc aling matrix X ∈ D , and r e ctangular matric es M ∈ R n u × n and V ∈ R n × n such that V T + V − P + ( AV + B 2 M ) T ( C 0 V + D 02 M ) T ( C 1 V + D 12 M ) T X X B T 0 X D T 00 X D T 12 AV + B 2 M B 0 X P + C 0 V + D 02 M D 00 X X C 1 V + D 12 M D 10 X I > 0 (13) V T + V − P − ( AV + B 2 M ) T ( C 0 V + D 02 M ) T ( C 1 V + D 12 M ) T X X B T 0 X D T 00 X D T 12 AV + B 2 M B 0 X P − C 0 V + D 02 M D 00 X X C 1 V + D 12 M D 10 X I > 0 (14) Q B T 1 B 1 P + − P − > 0 (15) tr( Q ) < γ 2 (16) The r esulting r obust state-fe e db ack c ontr ol ler is u ( k ) = M V − 1 x ( k ) . 5 Pr o of: Define F := M V − 1 . S ince P + , P − > 0, P − 1 + ≥ V − T ( V T + V − P + ) V − 1 P − 1 − ≥ V − T ( V T + V − P − ) V − 1 for an y n onsingular matrix V . Applying this inequalit y to the robust H 2 analysis conditions (6)-(9), w e h a v e V − T ( V T + V − P + ) V − 1 ( A + B 2 F ) T ( C 0 + D 02 F ) T ( C 1 + D 12 F ) T X − 1 B T 0 D T 00 D T 10 A + B 2 F B 0 P + C 0 + D 02 F D 00 X C 1 + D 12 F D 10 I > 0 (17) V − T ( V T + V − P − ) V − 1 ( A + B 2 F ) T ( C 0 + D 02 F ) T ( C 1 + D 12 F ) T X − 1 B T 0 D T 00 D T 10 A + B 2 F B 0 P − C 0 + D 02 F D 00 X C 1 + D 12 F D 10 I > 0 (18) Q B T 1 B 1 P + − P − > 0 (19) tr( Q ) < γ 2 . (20) and p er f orming th e congruence transformation diag V T , X, I , I leads to the LMI conditions ab o ve. Q.E.D. It is also p ossib le to consider output-feedbac k con trollers for robust H 2 syn thesis. Ho wev er, as in the robu st H ∞ case, th e resulting synthesis problem is n on-con v ex, and will not b e discuss ed here. 4 Gain-Sc heduling H 2 Output-F eedbac k Con trol If th e uncertaint y ∆( k ) is measurable in real time, we can consider a parameter-dep endent output- feedbac k controlle r: ˙ x k ( k ) u ( k ) q k ( k ) = A k B k 1 B k 0 C k 1 0 D k 10 C k 0 0 D k 00 x k ( k ) y ( k ) p k ( k ) (21) p k ( k ) = ∆( k ) q k ( k ) (22) whic h m irrors the parameter d ep enden ce of the LFT plan t and pro vides gain-sc h eduling control. The closed-lo op sys tem then tak es the form x ( k + 1) q ( k ) q k ( k ) e ( k ) = A cl B 0 ,cl B 1 ,cl C 0 ,cl D 00 ,cl D 01 ,cl C 1 ,cl D 10 ,cl D 11 ,cl x ( k ) p ( k ) p k ( k ) d ( k ) (23) p ( k ) p k ( k ) = ∆( k ) ∆( k ) q ( k ) q k ( k ) . (24) 6 The closed-lo op matrices are defined as A cl B 0 ,cl B 1 ,cl C 0 ,cl D 00 ,cl D 01 ,cl C 1 ,cl D 10 ,cl D 11 ,cl = A 0 B 0 0 B 1 0 0 0 0 0 C 0 0 D 00 0 0 0 0 0 0 0 C 1 0 D 10 0 0 + 0 B 2 0 I 0 0 0 D 02 0 0 0 I 0 D 12 0 × A k B k 1 B k 0 C k 1 0 D k 10 C k 0 0 D k 00 0 I 0 0 0 C 2 0 D 20 0 D 21 0 0 0 I 0 . By construction, D 01 ,cl = 0 and D 00 ,cl = 0 hold as desired. Similar to the state-feedbac k case, w e in tro d uce intermediate matrix v ariables V (not necessarily symmetric) to redu ce conserv atism and deriv e a con v ex LMI synthesis condition. Theorem 2 The close d-lo op LFT system is e xp onential ly stabilize d by a gain-sche duling LFT output-fe e db ack c ontr ol ler with r obust H 2 norm less than γ if ther e exist p ositive-definite matri- c es T + , T − ∈ S 2 n × 2 n + , Q ∈ S n d × n d + , sc aling matric es L, J ∈ D , and squar e matric e s R, S, U ∈ R n × n , such that S + S T I + U T U + I R T + R − T + G T 31 G T 41 G T 51 L I I J G T 32 G T 42 G T 52 G 31 G 32 T + G 41 G 42 L I I J G 51 G 52 I > 0 (25) S + S T I + U T U + I R T + R − T − G T 31 G T 41 G T 51 L I I J G T 32 G T 42 G T 52 G 31 G 32 T − G 41 G 42 L I I J G 51 G 52 I > 0 (26) Q H T 21 H 21 T + − T − > 0 (27) tr( Q ) < γ 2 (28) 7 wher e G 3 i , G 4 i , G 5 i and H 21 ar e define d as G 31 G 32 G 41 G 42 G 51 G 52 = AS A B 0 B 0 J 0 R A RB 0 0 0 LC 0 LD 00 0 C 0 S C 0 D 00 D 00 J C 1 S C 1 D 10 D 10 J + 0 B 2 0 I 0 0 0 0 I 0 D 02 0 0 D 12 0 × ˆ A k ˆ B k 1 ˆ B k 0 ˆ C k 1 0 ˆ D k 10 ˆ C k 0 0 ˆ D k 00 I 0 0 0 0 C 2 D 20 0 0 0 0 I H 21 = B 1 RB 1 + 0 B 2 0 I 0 0 ˆ A k ˆ B k 1 ˆ B k 0 ˆ C k 1 0 ˆ D k 10 ˆ C k 0 0 ˆ D k 00 0 D 21 0 . The LFT output-fe e db ack c ontr ol ler gains ar e then r e c over e d by i nverting the tr ansformatio n A k B k 1 B k 0 C k 1 0 D k 10 C k 0 0 D k 00 = M RB 2 0 0 I 0 0 LD 02 L 2 − 1 ˆ A k ˆ B k 1 ˆ B k 0 ˆ C k 1 0 ˆ D k 10 ˆ C k 0 0 ˆ D k 00 − RAS 0 RB 0 J 0 0 0 LC 0 S 0 LD 00 J × N 0 0 C 2 S I D 20 J 0 0 J T 2 − 1 (29) wher e M N = U − R S and L 2 J T 2 = I − L J . Pr o of: Since for an y nonsingular m atrix V , w e h av e P − 1 + ,cl ≥ V − T ( V + V T − P + ,cl ) V − 1 P − 1 − ,cl ≥ V − T ( V + V T − P − ,cl ) V − 1 , a su fficien t condition that guaran tees closed-lo op stabilit y an d the r obust H 2 norm f or the LFT system is V − T ( V + V T − P + ,cl ) V − 1 A T cl C T 0 ,cl C T 1 ,cl X − 1 B T 0 ,cl D T 00 ,cl D T 10 ,cl A cl B 0 ,cl P + ,cl C 0 ,cl D 00 ,cl X C 1 ,cl D 10 ,cl I > 0 (30) V − T ( V + V T − P − ,cl ) V − 1 A T cl C T 0 ,cl C T 1 ,cl X − 1 B T 0 ,cl D T 00 ,cl D T 10 ,cl A cl B 0 ,cl P − ,cl C 0 ,cl D 00 ,cl X C 1 ,cl D 10 ,cl I > 0 (31) Q B T 1 ,cl B 1 ,cl P + ,cl − P − ,cl > 0 (32) tr( Q ) < γ 2 . (33) 8 P artition V , V − 1 according to p lan t and control ler state dimensions n, n k as V = S ⋆ N ⋆ , V − 1 = R T ⋆ M T ⋆ , U := RS + M N , and similarly p artition X , X − 1 as X = J J 2 J T 2 J 3 , X − 1 = L L 2 L T 2 L 3 , L 2 J T 2 = I − LJ . Applying the congru ence trans f ormation suggested in [2 ], let Z := I R T 0 M T . Then V Z = S I N 0 , Z T V Z = S I U R . Define W 1 = L I L T 2 0 , W 2 = I J 0 J T 2 so that X W 1 = W 2 and W T 1 X W 1 = L I I J . T hen, the transformed closed-loop system satisfies Z T ( A cl V ) Z Z T ( B 0 ,cl X ) W 1 Z T B 1 ,cl W T 1 ( C 0 ,cl V ) Z W T 1 ( D 00 ,cl X ) W 1 W T 1 D 01 ,cl ( C 1 ,cl V ) Z ( D 10 ,cl X ) W 1 D 11 ,cl = AS A B 0 B 0 J B 1 0 RA RB 0 0 RB 1 0 LC 0 0 LD 00 0 0 C 0 S C 0 D 00 D 00 J 0 C 1 S C 1 D 10 D 10 J 0 + 0 B 2 0 I 0 0 0 0 I 0 D 02 0 0 D 12 0 × ˆ A k ˆ B k 1 ˆ B k 0 ˆ C k 1 0 ˆ D k 10 ˆ C k 0 0 ˆ D k 00 I 0 0 0 0 0 C 2 D 20 0 D 21 0 0 0 I 0 . The transformed con troller matrices r elate to the original A k , B k 1 , B k 0 , C k 1 , C k 0 , D k 10 , D k 00 via ˆ A k ˆ B k 1 ˆ B k 0 ˆ C k 1 0 ˆ D k 10 ˆ C k 0 0 ˆ D k 00 = RAS 0 R B 0 J 0 0 0 LC 0 S 0 LD 00 J + M RB 2 0 0 I 0 0 LD 02 L 2 A k B k 1 B k 0 C k 1 0 D k 10 C k 0 0 D k 00 N 0 0 C 2 S I D 20 J 0 0 J T 2 . (34) 9 Multiplying diag I , I , Z T , W T 1 , I from the left and its transp ose f rom the righ t in th e (30), and defining T + = Z T P + ,cl Z, T − = Z T P − ,cl Z , we get the cond ition (25). The seco n d co n dition (2 6) follo w s analogously b y congruen t tran s formation d iag I , Z T to the eqn. (31). Finally , sin ce the m atrices M RB 2 0 0 I 0 0 LD 02 L 2 N 0 0 C 2 S I D 20 J 0 0 J T 2 are n onsingular, the gain-sc hedulin g output-feedbac k con troller can b e reco v ered by inv erting eqn. (34). Q.E.D. This appr oac h provi d es a con vex synthesis cond ition for gain-sc hedu ling H 2 con trol while reducing conserv atism compared to direct synthesis m etho ds. 5 Illustrativ e Examples In this s ection, t w o repr esen tativ e examples are presented to demonstr ate the effectiv en ess of the prop osed robu st and gain-sc h ed uling H 2 con trol framewo rk. T he first example consid er s a t wo- disk mec hanical system and illustrates r obust state -feedback synthesis. T he second example inv olve s an activ e magnetic b earing (AMB) system and d emonstrates gain-sc hedu led output-feedbac k H 2 con trol for parameter-dep endent dyn amics. 5.1 Tw o-Disk System W e first consider a t wo-disk system p reviously studied in [20] to illustrate the robust state-feedbac k syn thesis m etho d deve lop ed in Section 3. The dynamics of the system are d escrib ed by M 1 ¨ r 1 ( t ) − Ω 2 1 ( t ) r 1 ( t ) = − b ˙ r 1 ( t ) − k ( r 1 ( t ) + r 2 ( t )) + f ( t ) (35) M 2 ¨ r 2 ( t ) − Ω 2 2 ( t ) r 2 ( t ) = − b ˙ r 2 ( t ) − k ( r 1 ( t ) + r 2 ( t )) (36) where r 1 , r 2 denote the p ositions of the t wo sliders relativ e to the cen ter, and Ω 1 , Ω 2 are the angular v elo cities of the tw o r o ds, v arying in the int erv als [0 , 3] r ad/sec and [0 , 5] r ad/sec , r esp ectiv ely . The con trol inp ut f acts on the first slider. Th e s ystem parameters are M 1 = 1 . 0 k g , M 2 = 0 . 5 kg , damping co efficien t b = 1 . 0 kg /sec , and spring constan t k = 200 N/m . Define normalized un certain t y parameters δ 1 = Ω 2 1 4 . 5 − 1 , δ 2 = Ω 2 2 12 . 5 − 1 so th at δ 1 , δ 2 ∈ [ − 1 , 1]. Let x 1 = r 1 , x 2 = r 2 , x 3 = ˙ r 1 , x 4 = ˙ r 2 , u = f , and y = r 2 , The plant 10 describ ed by (35)-(36) can then b e r ep resen ted in an LFT form as ˙ x q y = 0 0 1 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 4 . 5 − k M 1 − k M 1 − b M 1 0 4 . 5 0 0 . 1 M 1 0 1 M 1 − k M 2 12 . 5 − k M 2 0 − b M 2 0 12 . 5 0 0 . 1 M 2 0 1 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 x p d u (37) p = δ 1 δ 2 q (38) All states are assu m ed to b e m easur able f or state-feedbac k implemen tation. The design ob jectiv es are sp ecified using the f ollo win g weigh ting fun ctions: W e ( s ) = 0 . 3 s + 1 . 2 s + 0 . 04 , W u ( s ) = s + 0 . 1 0 . 01 s + 125 , W n ( s ) = s + 0 . 4 0 . 01 s + 400 , W a ( s ) = 0 . 00001 , Act ( s ) = 1 0 . 01 s + 1 . The con tinuous-time plant is discretized u sing a zero-order h old with a samp ling time of 0 . 01 sec . Robust H 2 and H ∞ state-feedbac k con trollers are syn thesized and compared. The resulting induced ℓ 2 -norm p er f ormance levels are summ arized in T able 1. T able 1: P erformance comparison of robust state-feedbac k con trol. Metho d Induced ℓ 2 norm H ∞ state feedbac k con trol 0.898 H 2 state feedbac k con trol 0.478 It is eviden t that the pr op osed robust H 2 syn thesis app roac h ac hiev es substantial ly less conserv ativ e p erformance than the corresp onding H ∞ design. This imp ro ve ment can b e attributed to the smaller disturbance set inher ent in the r obust H 2 form ulation, which b ette r reflects sto chastic distur b ance c haracteristics. 5.2 Activ e Magnetic B earing System The second example considers an activ e magnetic b earing (AMB) system to demonstrate the p ro- p osed gain-sc hedu ling outpu t-feedbac k H ∞ con trol approac h [18]. Due to the linear dep end ence of the plan t d ynamics on rotor sp eed, the n onlinear gyroscopic equations can b e appr o ximated by a 11 linear parameter-v arying (LPV) mo del: ℓ ¨ θ = − ρJ a J r ℓ ˙ ψ + 1 m ( − 4 c 2 ℓθ + 2 c 1 φ θ + f dθ ) (39) ℓ ¨ ψ = ρJ a J r ℓ ˙ θ + 1 m ( − 4 c 2 ℓψ + 2 c 1 φ ψ + f dψ ) (40) ˙ φ θ = 1 N ( e θ + 2 d 2 ℓθ − d 1 φ θ ) (41 ) ˙ φ ψ = 1 N ( e ψ + 2 d 2 ℓψ − d 1 φ ψ ) (42) where th e rotor sp eed ρ serv es as the sc h ed uling parameter. θ , ψ are the Euler angles denoting the orien tation of r otor cente r lin e. J a , J r are the momen t of in ertia of the r otor in axial and r adial directions, resp ectiv ely . φ θ , φ ψ are the differen tial magnetic flux from ele ctromagnetic p airs, e θ , e ψ are the corresp onding differences of electric vo ltage. f dθ , f dψ are disturbance f orces caused by gra vit y , mo d eling errors, imbalances, etc. The constan ts c 1 , c 2 , d 1 , and d 2 dep end on Φ 0 , G 0 , R , A , N , ν 0 , an d the b earing geometry , as defi ned in c 1 = 2 k Φ 0 1 + 2 G 0 π h , c 2 = 2 k Φ 2 0 π h , d 1 = 2 RG 0 ν 0 AN , d 2 = 2 R Φ 0 ν 0 AN The system parameters are summarized in T able 2. T able 2: Activ e magnetic b earing parameters. P arameter V alue A area of eac h p ole ( mm 2 ) 1531 . 7 9 h p ole width ( mm ) 40 . 00 G 0 nominal gap( mm ) 0 . 55 J r radial moment of inertia ( k g · m 2 ) 0 . 333 J a axial m omen t of inertia ( k g · m 2 ) 0 . 0136 ℓ half the length of the shaft ( m ) 0 . 13 k 4 . 6755 576 × 10 8 N num b er of coil tu rns 400 R coil resistance ( O hm ) 14 . 6 Φ 0 nominal airgap ( W b ) 2 . 09 × 10 − 4 Let the state, distu rbance, and cont rol ve ctors as x T = ℓθ ℓψ ℓ ˙ θ ℓ ˙ ψ φ θ φ ψ , d T = f dθ f dψ , u T = e θ e ψ , the system can b e w r itten in LPV state-space form. ˙ x = A ( ρ ) x + B 1 d + B 2 u e = C 1 x + D 11 d + D 12 u y = C 2 x + D 21 d + D 22 u 12 where the state-space d ata are A ( ρ ) = 0 0 1 0 0 0 0 0 0 1 0 0 − 4 c 2 m 0 0 − ρJ a J r 2 c 1 m 0 0 − 4 c 2 m ρJ a J r 0 0 2 c 1 m 2 d 2 N 0 0 0 − d 1 N 0 0 2 d 2 N 0 0 0 − d 1 N B 1 = 0 6 × 2 , B 2 = 1 N 0 4 × 2 I 2 C 1 = I 2 0 2 × 4 0 2 × 6 , D 11 = 0 4 × 2 , D 12 = 0 2 × 2 I 2 C 2 = I 2 0 2 × 4 , D 21 = I 2 , D 22 = 0 2 × 2 . The r otor sp eed ρ is assumed to b e av ailable in real-time and v aries within [315 , 1100] rad/s , a range in w h ic h strong gyroscopic effects are pr esen t. In automatic b alancing d esign, f dθ and f dψ are typicall y mo deled as s ensor noise on the measured r otor displacemen t. T he affine LPV mo del is subsequently transformed in to an LFT representa tion for gain-sc h eduling synt h esis. The control ob jectiv e is to stabilize the s y s tem o ver the full sp eed range wh ile minimizing dis- turbance effec ts on rotor d isplacemen t. Th ese ob jectiv es are captured u sing w eighti n g functions deriv ed fr om frozen-parameter d esigns, yielding the w eigh ted in terconnection s h o wn in Fig. 1. P U W z W u d e u e z y u W n n + + Figure 1: W eight ed op en-loop interco n nection for the magnetic b earing system. The we ighting functions are chosen as W z ( s ) = 10( s + 8) s + 0 . 001 I 2 , W u ( s ) = 0 . 01( s + 100) s + 100000 I 2 W n ( s ) = 0 . 001 I 2 . The con tin u ou s -time system is discretized with a samp lin g time of 0 . 01 sec . T able 3 compares the robust H 2 and H ∞ gain-sc h eduling designs. As in the previous example, the r obust H 2 con troller ac hiev es significantly impr o v ed p erform ance with reduced conserv atism. 13 T able 3: Pe r f ormance comparison of differen t gain-sc hedulin g con trol. Metho d Induced ℓ 2 norm H ∞ output feedbac k con trol 8.458 H 2 output feedbac k con trol 2.640 Time-domain simulatio n s are sho wn in Fig. 2, where step disturb ances of magnitude 0 . 001 m and opp osite signs are applied. T h e gain-sc hedu led H 2 con troller effecti vely supp resses disturbances and rapidly d riv es the rotor d isplacemen ts to zero across the entire sp eed range. 0 1 2 3 4 5 6 7 8 9 10 −2 −1 0 1 2 3 4 5 6 7 x 10 −6 Time (s) displacement (m) displacement 1 displacement 2 (a) Displacemen t 0 1 2 3 4 5 6 7 8 9 10 −0.12 −0.1 −0.08 −0.06 −0.04 −0.02 0 0.02 0.04 Time (s) control force (N) control force 1 control force 2 (b) Control force Figure 2: Time-domain simulat ion of gain-sc hedu lin g H 2 con trol 6 Conclusion This p ap er has d ev elop ed a u nified robu st and gain-sc h eduling con trol fr amework based on a r obust H 2 p erformance measur e, providing an alternativ e to classical wo rs t-case design metho d ologies. In con trast to H ∞ con trol, wh ich characte rizes p erformance through induced ℓ 2 -gain and is in herent ly tailored to adve rs arial distu r bances, the prop osed appr oac h is theoretically grounded in the white- noise and imp ulse-resp onse inte rp retation of the H 2 norm. By emb edding uncertain ty descriptions directly into th e H 2 analysis, the resulting p erformance b ounds remain robust while a voiding the excessiv e conserv atism typical ly associated with worst-c ase cr iteria. The deriv ed synthesis condi- tions establish explicit links b et ween r obust stabilit y , gain scheduling, and sto c hastic p erf orm ance, thereb y extending classical H 2 theory b ey ond the linear time-in v ariant setting. Numerical examples confirm that the prop osed robust H 2 design ac hiev es improv ed d isturbance rejection with r educed conserv atism compared to standard H ∞ -based con tr ollers, particularly in systems d ominated by sto c hastic disturbances. Sev eral d irections for future researc h can b e envisio n ed . First, the extension of the prop osed robu st H 2 syn thesis to outpu t-feedbac k co ntrollers with dynamic co mp ensation co uld broaden pr actical applicabilit y , particularly for systems with partial state m easuremen ts. Second, inte grating p erfor- mance ob jectiv es b eyond the H 2 norm, such as m ixed H 2 / H ∞ criteria or regional p ole placemen t, ma y yield con trollers that b etter balance r obustness and transient p erformance. 14 References [1] J. Daa fouz and J. Bernussou, and J.C. Geromel, “On inexact LPV con trol design of cont inuous- time p olytopic sys tems,” Int. J. Contr ol , 81(9):1 430-1445, 2008. [2] M.C. d e Olivei r a, J.C . Geromel, and J. Bernussou, “Extended H 2 and H ∞ norm c h aracteriza- tions an d controll er parameterizations for discr ete-time systems,” Int. J. Contr ol , 75:666 -679, 2002. [3] G.E. Dullerud and F. P aganini, A Course in R obust Contr ol The ory: A Convex Appr o ach , Springer, 2000. [4] Y. Ebihara and T . Hagiw ara, “A dilated LMI approac h to robust p erformance analysis of linear time-in v arian t uncertain s y s tems,” Atom atic a , 41(11):193 3-1941, 2005. [5] E. F eron, “Analysis of robust H 2 p erformance using m ultipliers theory ,” SIAM J. Contr. Optim. , 35(1):16 0-177, 1997. [6] K.-C. Goh and F.W u, “Dualit y and b asis functions for robust H 2 p erformance analysis,” Autom atic a , 33(11):194 9-1959, 1997. [7] MUSYN, µ - Analys is and Synthesis T o olb ox U ser’s Guide , Math works, Inc, Natic k, MA, 1991. [8] A. Pa ck ard and J. Do yle, “Th e complex s tr uctured singular v alue,” Automa tic a , 29(1): 71-109, 1993. [9] F. Pag anini, “F requen cy domain conditions for Robu s t H 2 p erformance,” IEEE T r ans. Autom. Contr ol , 44(1) :38-49, 1999. [10] F. P aganini, “Conv ex metho ds for robu st H 2 analysis of con tinuous-time systems,” IEEE T r ans. Autom. Contr ol , 44(2):2 39-252, 1999. [11] F. Paga nin i and E. F eron, Line ar Matrix Ine quality M etho ds for R obust H 2 Ana lysis: A Survey with Comp arisons , in A dvanc es in Line ar M atrix Ine quality Metho ds in Contr ol (Ed. L. El Ghaoui and S .-I. Niculescu), SIAM, 2000. [12] P .L.D. Peres, S.R. Souza, and J .C . Geromel, “Optimal H 2 con trol for un certain sys tems,” in Pr o c. Amer. Contr. Confenc e , pp. 2916-2920, 1992. [13] I.R. Pe tersen and D.C. McF arlane, “Op timal guarantee d cost con trol of uncertain linear sys - tems,” in Pr o c. Amer . Contr. Confer enc e , pp. 2929-293 0, 1992. [14] P . Prempain an d I. Po stlethw aite, “ L 2 and H 2 p erformance analysis and gain-sc heduling syn- thesis for p arameter-dep endent systems,” Automatic a , 44(6):15 36-1543, 2008. [15] K. S ato and Y. Ebihara, and D. Pea ucelle, “Gain-sc heduled stat e-feedbac k con trollers using inexactly measured sc hedu ling parameters: H 2 and H ∞ problems,” in Pr o c. Amer. Contr. Confer enc e , pp. 1234-124 0, 2010. [16] C.W. Sc herer , P . Gahinet, and M. Chilali, “Multi ob jectiv e output-feedbac k co ntrol via LMI optimization,” IEEE T r ans. Autom. Contr ol , 42(7):896-9 11, 2002. [17] A.A. Sto orv ogel, “The robu st H 2 problem: A w orst case d esign,” IEEE T r ans. Autom. Contr ol , 38:135 8-1370, 1993. 15 [18] F. W u, “Switc hing LPV con trol design for magnetic b earing systems,” in Pr o c. IEE E Conf. Contr ol A pplic ations , pp . 41-46, 2001. DOI: 10.1109 /CCA.2001.973835 [19] F. W u and K. Dong, “Robust and gain-sc hedu led H 2 syn thesis for LFT parameter- dep end en t systems,” in Pr o c. Amer. Contr. Confer enc e , p p. 2851- 2856, 2005. DOI: 10.110 9/A CC.2005.1470402 [20] F. W u and B. Lu, “On con vexified robust con trol s y nthesis,” A utomatic a , 40(6):1003 -1010, 2004. [21] J. Zhang and W. Li, “Static ou tp ut-feedbac k robu st gain-sc hedu ling control with guarantee d H 2 p erformance,” J . F r anklin Institute , 355(15) :6787-6804, 2018. [22] K. Zhou, J. Do yle and K. Glo ver, R obust and Optimal Contr ol , Pren tice-Hall, Upp er S ad d le Riv er, NJ , 1996. [23] K. Zh ou, K. Glov er, B. Bo denheimer and J. Do yle, “Mixed H 2 and H ∞ p erformance ob jectiv es I: Robust p erformance analysis,” IEEE T r ans. Autom. Contr ol , 39:156 4-1574, 1994. 16
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment