A Unified Formula for Affine Transformations between Calibrated Cameras
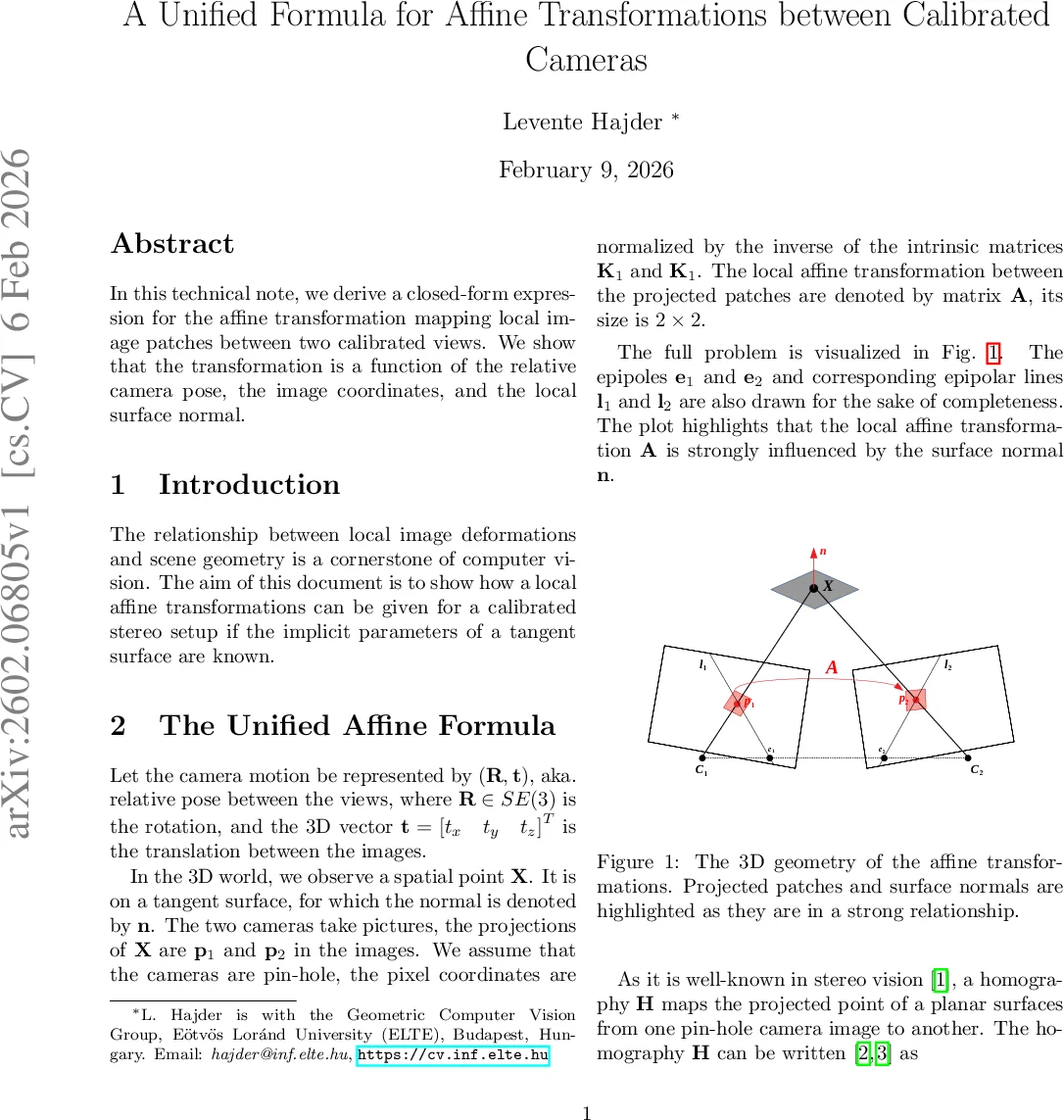
In this technical note, we derive a closed-form expression for the affine transformation mapping local image patches between two calibrated views. We show that the transformation is a function of the relative camera pose, the image coordinates, and the local surface normal.
💡 Research Summary
This technical note presents a significant theoretical contribution to geometric computer vision by deriving a unified, closed-form expression for the affine transformation that maps local image patches between two calibrated camera views. The core problem addressed is understanding how a small image region around a 3D point appears deformed in a second view, given the cameras’ relative pose and the local surface geometry.
The authors begin by establishing the standard setup: two pinhole cameras with known intrinsic parameters (calibrated), related by a relative pose consisting of a rotation matrix R and a translation vector t =
Comments & Academic Discussion
Loading comments...
Leave a Comment