Constraint Manifold Exploration for Efficient Continuous Coverage Estimation
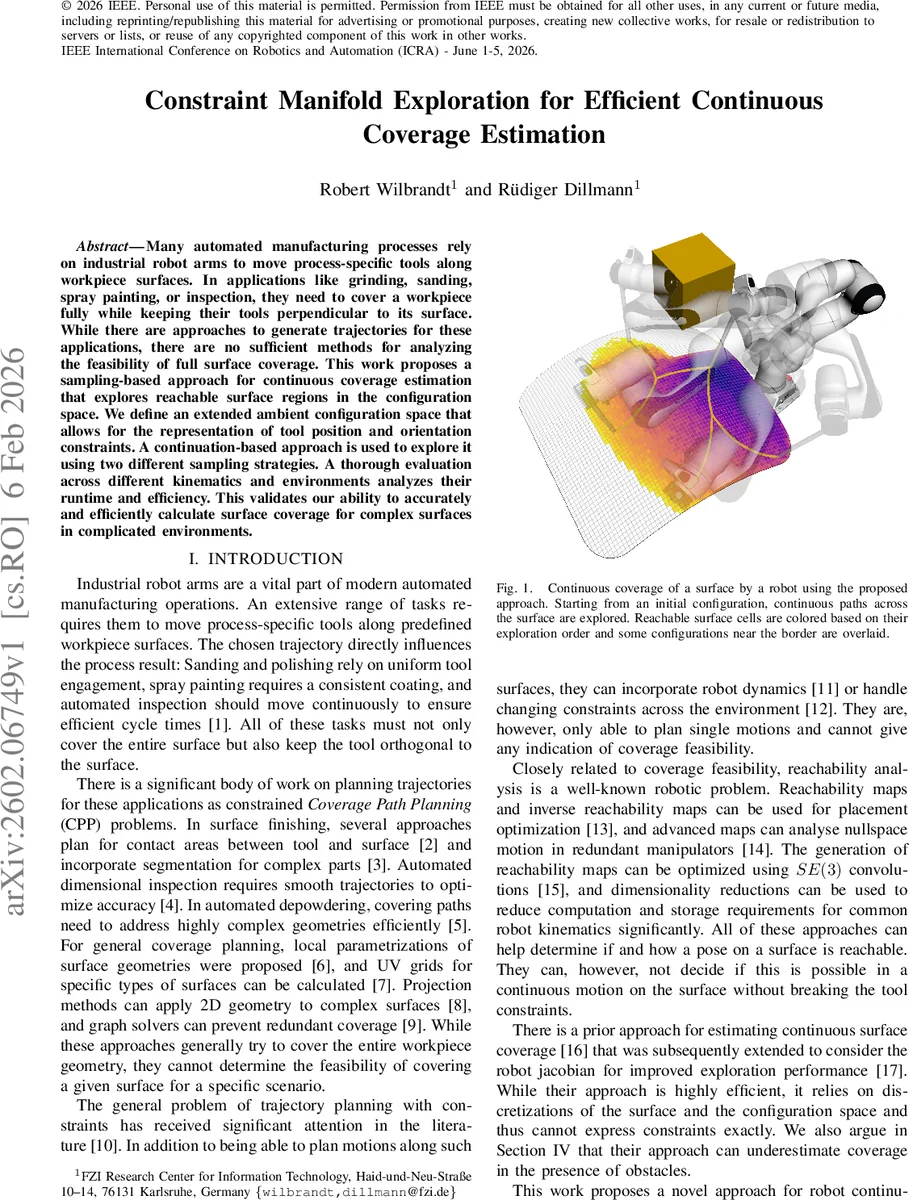
Many automated manufacturing processes rely on industrial robot arms to move process-specific tools along workpiece surfaces. In applications like grinding, sanding, spray painting, or inspection, they need to cover a workpiece fully while keeping their tools perpendicular to its surface. While there are approaches to generate trajectories for these applications, there are no sufficient methods for analyzing the feasibility of full surface coverage. This work proposes a sampling-based approach for continuous coverage estimation that explores reachable surface regions in the configuration space. We define an extended ambient configuration space that allows for the representation of tool position and orientation constraints. A continuation-based approach is used to explore it using two different sampling strategies. A thorough evaluation across different kinematics and environments analyzes their runtime and efficiency. This validates our ability to accurately and efficiently calculate surface coverage for complex surfaces in complicated environments.
💡 Research Summary
This paper addresses a critical gap in industrial robotics: determining whether a robot can continuously cover an entire workpiece surface while keeping its tool orthogonal to that surface. Existing trajectory‑generation methods can produce feasible paths for specific tasks, but they do not provide a quantitative feasibility analysis for full‑coverage scenarios that respect both kinematic limits and tool‑orientation constraints.
The authors formulate the problem by defining a robot’s n‑dimensional configuration space (Q) and a smooth surface (S(u,v)). A configuration (q\in Q) is “surface‑constrained” if the tool tip lies exactly on the surface and the tool’s z‑axis aligns with the surface normal. To capture these constraints explicitly, they introduce an extended configuration space (Q^{+}= {(q,u,v)\mid q\in Q, (u,v)\in U}) and two zero‑level constraint functions: a positional constraint (C_{pos}=f_{pos}(q)-S(u,v)) and a rotational constraint (C_{rot}=
Comments & Academic Discussion
Loading comments...
Leave a Comment