Structured Learning for Electromagnetic Field Modeling and Real-Time Inversion
Precise magnetic field modeling is fundamental to the closed-loop control of electromagnetic navigation systems (eMNS) and the analytical Multipole Expansion Model (MPEM) is the current standard. However, the MPEM relies on strict physical assumptions regarding source symmetry and isolation, and requires optimization-based calibration that is highly sensitive to initialization. These constraints limit its applicability to systems with complex or irregular coil geometries. This work introduces an alternative modeling paradigm based on multi-layer perceptrons that learns nonlinear magnetic mappings while strictly preserving the linear dependence on currents. As a result, the field models enable fast, closed-form minimum-norm inversion with evaluation times of approximately 1 ms, which is critical for high-bandwidth magnetic control. For model training and evaluation we use large-scale, high-density datasets collected from the research-grade OctoMag and clinical-grade Navion systems. Our results demonstrate that data-driven models achieve predictive fidelity equivalent to the MPEM while maintaining comparable data efficiency. Furthermore, we demonstrate that straightforward design choices effectively eliminate spurious workspace ill-conditioning frequently reported in MPEM-based calibration. To facilitate future research, we release the complete codebase and datasets open source.
💡 Research Summary
Precise magnetic field modeling is a cornerstone of electromagnetic navigation systems (eMNS) used in medical robotics, magnetic actuation, and a variety of other electromagnetic platforms. The prevailing analytical approach, the Multipole Expansion Model (MPEM), assumes azimuthal symmetry of each coil, linearity with respect to coil currents, and requires a non‑linear calibration routine that is highly sensitive to initial guesses. These constraints make MPEM difficult to apply to systems with irregular coil geometries or to scenarios where rapid, high‑bandwidth control is required.
The authors propose a data‑driven alternative that preserves the essential linear (or affine) relationship between coil currents and the generated magnetic field while allowing a highly non‑linear dependence on spatial position. Two neural‑network architectures are introduced: (1) ActuationNet, which directly maps a 3‑D workspace coordinate to the local field‑actuation matrix A(p) and bias vector b₀(p); and (2) PotentialNet, which predicts a scalar magnetic potential for each coil and a bias potential, then takes the spatial gradient to obtain a curl‑free field representation. Both networks are built from multilayer perceptrons (MLPs) with tanh activations, typically 3–5 hidden layers of 128–256 units, trained with the Adam optimizer on large, high‑density measurement datasets.
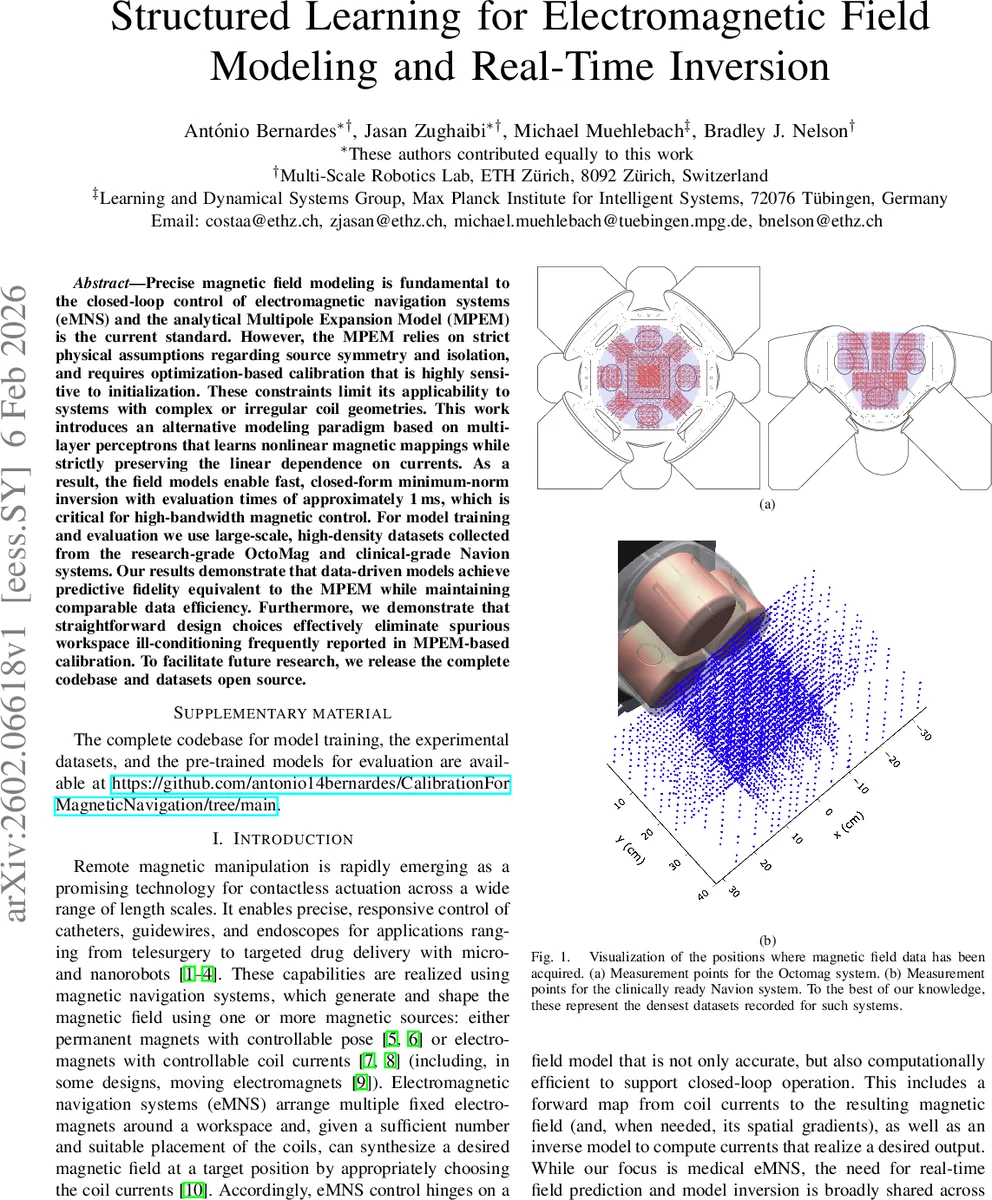
The experimental data were collected from two state‑of‑the‑art eMNS platforms: the research‑grade OctoMag (8 coils, ~13 cm hemispherical workspace) and the clinical‑grade Navion (3 coils, human‑scale workspace). For each system, the authors built dense magnetic field maps using arrays of triaxial magnetometers (1.7 mm spacing for OctoMag, 5 cm spacing for Navion) and swept each coil independently across a current range that remained within the linear regime (±4 A for OctoMag, 0–30 A for Navion). Linearity was verified by per‑position affine fits yielding R² > 0.99, and a constant offset term was observed, attributed to sensor bias or residual magnetization. Outliers were removed using a RANSAC‑based scheme with a scale‑aware relative residual threshold, discarding only 2–3 % of the measurements.
Training the networks on the full datasets resulted in mean absolute errors (MAE) of roughly 0.2 mT, comparable to or slightly better than the calibrated MPEM. Crucially, inference time was under 1 ms on a standard CPU (≈0.9 ms) and under 0.5 ms on a GPU, meeting the latency requirements of high‑bandwidth closed‑loop control. Because ActuationNet preserves the affine current‑field relationship, the inverse problem reduces to a closed‑form minimum‑norm solution using the Moore–Penrose pseudoinverse, eliminating the need for iterative non‑linear optimization that plagues MPEM‑based inversions. The authors also demonstrate that the notorious ill‑conditioning of the actuation matrix observed in MPEM calibrations virtually disappears with ActuationNet, a result they attribute to the network’s ability to learn smooth, well‑conditioned spatial variations without imposing overly rigid physical constraints.
Data‑efficiency experiments show that even with only 10 % of the full measurement set, the learned models retain MAE < 0.3 mT, indicating strong generalization from relatively modest data volumes. PotentialNet, while guaranteeing a curl‑free field by construction, does not enforce divergence‑free conditions; however, the authors discuss possible extensions using harmonic basis functions to satisfy both Maxwell constraints.
Finally, the authors release the complete codebase, training pipelines, and the curated OctoMag and Navion datasets on GitHub, fostering reproducibility and enabling the broader community to apply these techniques to other electromagnetic systems such as MRI field shaping, magnetic particle imaging, magnetic levitation, and wireless power‑transfer arrays. The work establishes that physics‑aware deep learning can match analytical models in accuracy while delivering the computational speed and robustness required for real‑time magnetic control.
Comments & Academic Discussion
Loading comments...
Leave a Comment