Policy-Driven Orchestration Framework for Multi-Operator Non-Terrestrial Networks
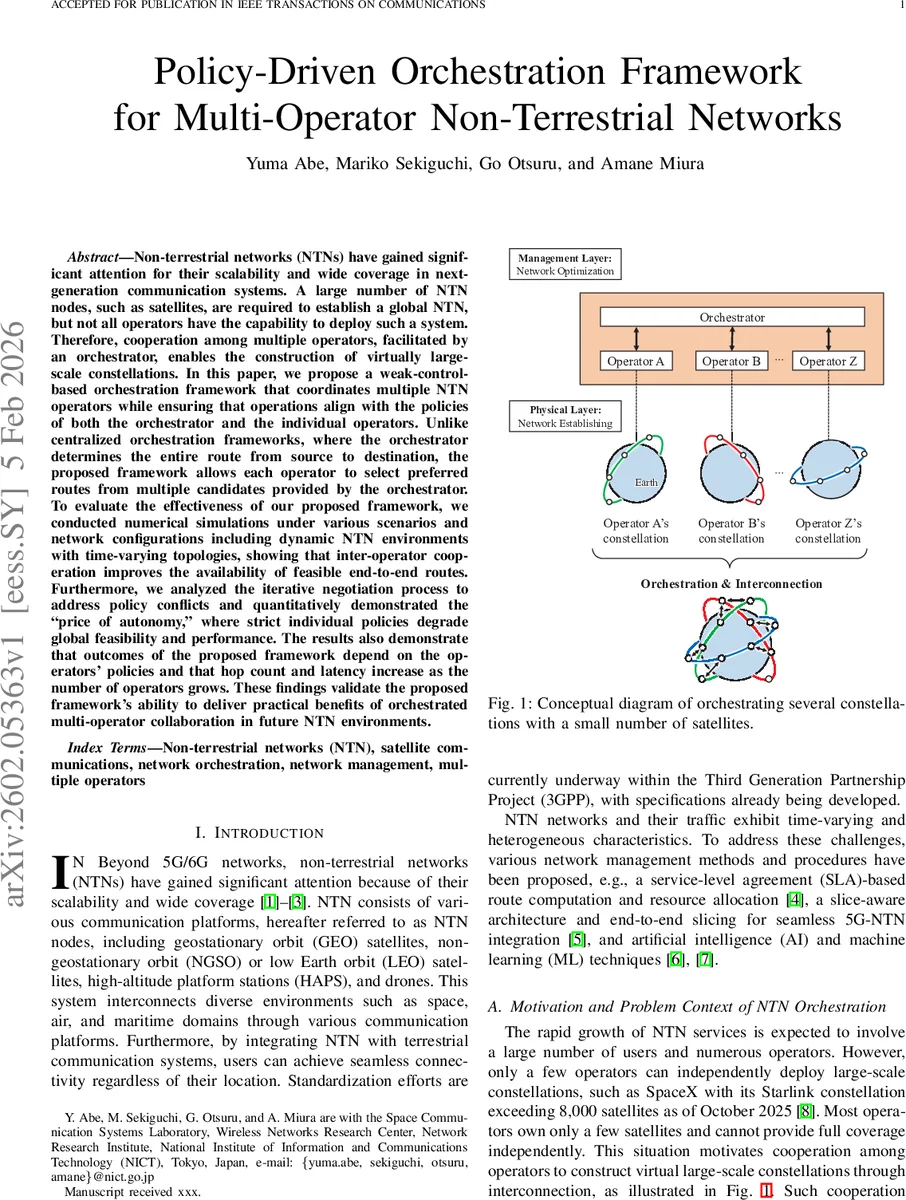
Non-terrestrial networks (NTNs) have gained significant attention for their scalability and wide coverage in next-generation communication systems. A large number of NTN nodes, such as satellites, are required to establish a global NTN, but not all operators have the capability to deploy such a system. Therefore, cooperation among multiple operators, facilitated by an orchestrator, enables the construction of virtually large-scale constellations. In this paper, we propose a weak-control-based orchestration framework that coordinates multiple NTN operators while ensuring that operations align with the policies of both the orchestrator and the individual operators. Unlike centralized orchestration frameworks, where the orchestrator determines the entire route from source to destination, the proposed framework allows each operator to select preferred routes from multiple candidates provided by the orchestrator. To evaluate the effectiveness of our proposed framework, we conducted numerical simulations under various scenarios and network configurations including dynamic NTN environments with time-varying topologies, showing that inter-operator cooperation improves the availability of feasible end-to-end routes. Furthermore, we analyzed the iterative negotiation process to address policy conflicts and quantitatively demonstrated the “price of autonomy,” where strict individual policies degrade global feasibility and performance. The results also demonstrate that outcomes of the proposed framework depend on the operators’ policies and that hop count and latency increase as the number of operators grows. These findings validate the proposed framework’s ability to deliver practical benefits of orchestrated multi-operator collaboration in future NTN environments.
💡 Research Summary
The paper addresses a fundamental challenge in the emerging non‑terrestrial network (NTN) ecosystem: how to enable cooperation among multiple satellite operators who each possess only a limited constellation, while respecting their individual operational policies and protecting proprietary information. Traditional centralized orchestration schemes assume that a single controller can dictate the entire end‑to‑end route for every traffic flow. This assumption breaks down in realistic scenarios because operators have diverse Service Level Agreements (SLAs), interference avoidance requirements, asset‑protection constraints, and a reluctance to disclose detailed policy parameters to a third‑party orchestrator.
To overcome these limitations, the authors introduce a “weak‑control” based orchestration framework. The concept originates from human‑in‑the‑loop control systems, where a global controller supplies a set of permissible actions and each decision maker selects one according to its own objectives. In the NTN context, the orchestrator computes a collection of feasible candidate routes for a given source‑destination pair, taking into account physical link feasibility (visibility, distance, carrier‑to‑noise ratio, optical power, etc.) and time‑varying topology. Operators then apply their own policies—such as maximum latency, hop‑count limits, avoidance of specific nodes, or minimization of inter‑operator handovers—to pick a route from this candidate set. The orchestrator guarantees that the selected route still satisfies a global feasibility set (flow conservation, loop‑free constraints, etc.) and strives for a “sub‑optimal” solution that balances overall network efficiency with fairness among operators.
The framework is formalized in three steps: (1) Network Modeling – the orchestrator aggregates node and link information from all operators, builds a global graph (G(V,E)), and derives the time‑dependent feasible link set based on geometric and link‑budget criteria. (2) Candidate Generation – using the global graph, the orchestrator enumerates multiple candidate paths and evaluates each for latency, hop count, and number of inter‑operator links. (3) Policy‑Driven Selection – each operator evaluates the candidates with its own policy (\pi_i), expressed via an evaluation function (J_{\pi_i}) and a constraint set (C_{\pi_i}). If the chosen path respects the global constraints (C_0), the routing decision is finalized.
Policies are categorized as follows:
- No policy ((\pi_{\phi})) – any candidate is acceptable.
- Latency‑minimization ((\pi_{ML})), Hop‑count minimization ((\pi_{MH})), Inter‑operator link minimization ((\pi_{MO})) – expressed as objective functions.
- Threshold policies ((\pi_{LL}(n_l)), (\pi_{LH}(n_h)), (\pi_{LO}(n_o))) – impose upper bounds on latency, hops, or inter‑operator links.
- Node‑avoidance ((\pi_{AN}(V_a))) – forbids traversal of a specified node set.
When policies conflict, an iterative negotiation process is triggered between the orchestrator and the operators. The authors quantify the “price of autonomy” as the performance degradation (in latency, hop count, or feasibility) incurred when operators enforce stricter policies.
Simulation studies are conducted on mixed GEO‑LEO‑HAPS constellations with dynamic topology. Five experimental scenarios are explored: (i) varying the number of cooperating operators, (ii) tightening or relaxing individual policy thresholds, (iii) multi‑layer (dual‑orbit) configurations, (iv) time‑varying link availability, and (v) different traffic patterns. Key findings include:
- Scalability of Cooperation – Adding more operators increases the number of inter‑operator handovers and overall hop count, but also raises the probability of finding at least one feasible end‑to‑end path.
- Impact of Policy Strictness – Looser policies yield up to a 20 % increase in routing success rate and significantly lower average latency. Conversely, stringent policies can cause a 10 %–30 % performance loss, illustrating the “price of autonomy.”
- Multi‑Layer Benefits – Combining GEO and LEO layers provides redundancy; even though LEO satellites move rapidly, the orchestrator’s candidate pool can adapt quickly, preserving end‑to‑end availability.
- Negotiation Overhead – The iterative negotiation converges within a few rounds in most cases, indicating that the additional signaling overhead is manageable.
The paper’s contributions are threefold: (1) a novel weak‑control based mathematical model for policy‑driven NTN orchestration, (2) a three‑step solution procedure that respects both global feasibility and operator autonomy, and (3) extensive quantitative evaluation that demonstrates the practical benefits and trade‑offs of multi‑operator collaboration.
Future research directions suggested include: integrating machine‑learning techniques for proactive candidate‑path generation, employing blockchain or secure multi‑party computation to verify policy compliance without revealing sensitive parameters, and conducting large‑scale field trials with real satellite telemetry to validate the framework under operational conditions.
In summary, this work pioneers a policy‑centric, weak‑control orchestration paradigm that enables heterogeneous satellite operators to jointly construct viable end‑to‑end routes while preserving their strategic autonomy. The proposed framework is poised to become a cornerstone for future integrated terrestrial‑satellite networks, 6G, and beyond, where collaborative satellite constellations will be essential for global connectivity.
Comments & Academic Discussion
Loading comments...
Leave a Comment