Phase-Only Positioning in Distributed MIMO Under Phase Impairments: AP Selection Using Deep Learning
Carrier phase positioning (CPP) can enable cm-level accuracy in next-generation wireless systems, while recent literature shows that accuracy remains high using phase-only measurements in distributed MIMO (D-MIMO). However, the impact of phase synchronization errors on such systems remains insufficiently explored. To address this gap, we first show that the proposed hyperbola intersection method achieves highly accurate positioning even in the presence of phase synchronization errors, when trained on appropriate data reflecting such impairments. We then introduce a deep learning (DL)-based D-MIMO antenna point (AP) selection framework that ensures high-precision localization under phase synchronization errors. Simulation results show that the proposed framework improves positioning accuracy compared to prior-art methods, while reducing inference complexity by approximately 19.7%.
💡 Research Summary
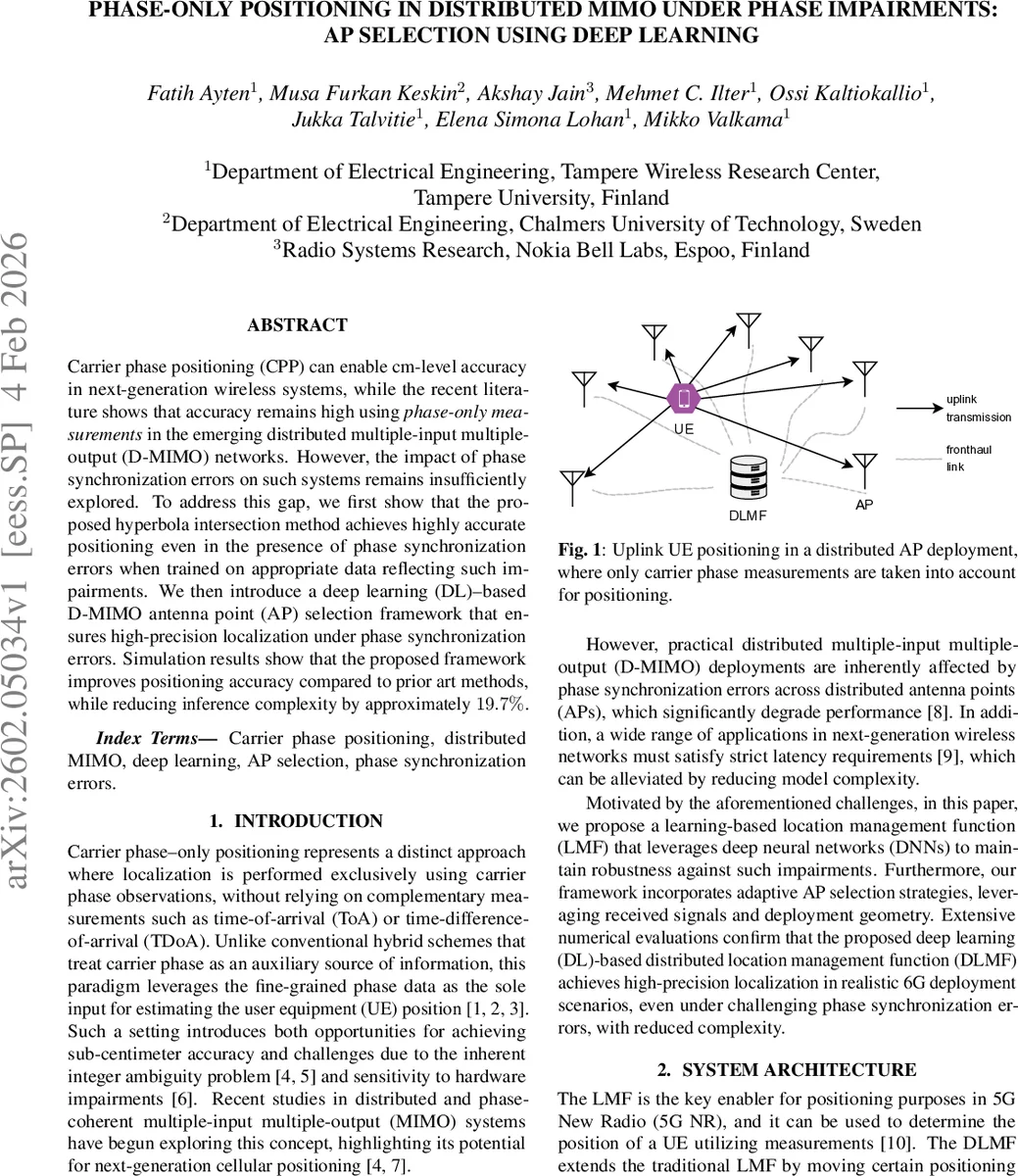
The paper tackles the problem of achieving centimeter‑level positioning accuracy in distributed multiple‑input multiple‑output (D‑MIMO) networks using only carrier‑phase measurements, a paradigm known as carrier‑phase positioning (CPP). While prior work has shown that phase‑only measurements can be effective, the impact of phase synchronization errors among the spatially separated antenna points (APs) has not been thoroughly investigated. To fill this gap, the authors first adopt the hyperbola‑intersection method, originally proposed in earlier work, as the core geometric localization engine. This method interprets each differential phase measurement between a reference AP and another AP as a hyperbola whose foci are the two AP locations; the UE position lies at the intersection of a set of such hyperbolas.
A critical bottleneck of the hyperbola‑intersection approach is the need to estimate integer ambiguities (Δz) for all I‑1 differential measurements, which leads to high computational complexity and large model size. The authors therefore propose a deep‑learning‑based AP selection framework that limits ambiguity estimation to only two AP pairs, dramatically reducing the number of parameters while preserving accuracy. The framework consists of two neural networks: (1) a multi‑layer perceptron (MLP) that estimates the differential ambiguities (Δẑ) from the raw differential phase vector, and (2) a second MLP that, given a feature vector F, predicts the expected positioning error for every possible ambiguity pair.
The feature vector F concatenates measurement‑based information (the differential phase values δ and per‑AP SNR) with geometry‑based descriptors (inter‑AP distances, angles, indices of nearest and farthest neighbours, etc.). For a system with I APs, F has dimension 8I. The second MLP outputs η = (I‑1 choose 2) error predictions, one per unordered pair of ambiguities. During inference, the pair (a*, b*) with the smallest predicted error is selected, and only the corresponding two branches of the ambiguity‑estimation MLP are activated. The selected ambiguities are added to the differential phase measurements to obtain corrected distance estimates, which are then fed into the gradient‑descent (GD) solver that iteratively refines the UE position over T iterations (T = 500 in the simulations).
Complexity analysis shows that the AP‑selection network requires roughly 0.42 × 10⁶ floating‑point operations (FLOPs), while the full hyperbola‑intersection pipeline (all ambiguities) needs about 1.262 × 10⁶ FLOPs. By estimating only two ambiguities together with the selection network, the total FLOP count drops to ≈0.594 × 10⁶, a reduction of about 19.7 % compared with the baseline.
Simulation experiments are conducted in a 100 m² area with nine APs placed according to the layout used in the reference work. Phase‑synchronization errors are modeled as zero‑mean Gaussian perturbations with standard deviations σ ∈ {0, π/200, π/100, π/50}. The system assumes line‑of‑sight propagation and uses a narrowband uplink pilot at 0 dBm transmit power. Training of the ambiguity estimator uses 700 k samples (150 k validation), while the AP‑selection network is trained on 200 k samples (40 k validation, 40 k test).
Results demonstrate that when the training data includes phase perturbations (σ = π/100), the overall ambiguity‑estimation accuracy stays above 99 % and the 95‑th percentile positioning error remains below 0.5 cm, indicating strong robustness to synchronization errors. The AP‑selection model outperforms three baselines: random pair selection, Max‑SNR pair selection, and using all ambiguities without selection. Specifically, the proposed method achieves a 95‑th percentile error of 0.26 cm and a 99‑th percentile error of 0.48 cm, compared with 0.30 cm / 0.59 cm for the “no‑selection” case and considerably larger errors for the other baselines. The “best‑achievable” oracle (choosing the optimal pair per sample) yields 0.14 cm / 0.23 cm, showing that the learned selector approaches the theoretical optimum while requiring far fewer computations.
The authors acknowledge several limitations: the study is confined to two‑dimensional, line‑of‑sight scenarios; multipath/NLOS effects and three‑dimensional positioning are left for future work. Moreover, the impact of AP position uncertainty, hardware non‑linearities, and dynamic network conditions has not been examined. Nonetheless, the paper provides a compelling demonstration that phase‑only positioning can be made robust to realistic phase‑synchronization impairments through a combination of geometric methods and lightweight deep‑learning‑driven AP selection, paving the way for practical centimeter‑level localization in upcoming 6G deployments.
Comments & Academic Discussion
Loading comments...
Leave a Comment