Generalized Schrödinger Bridge on Graphs
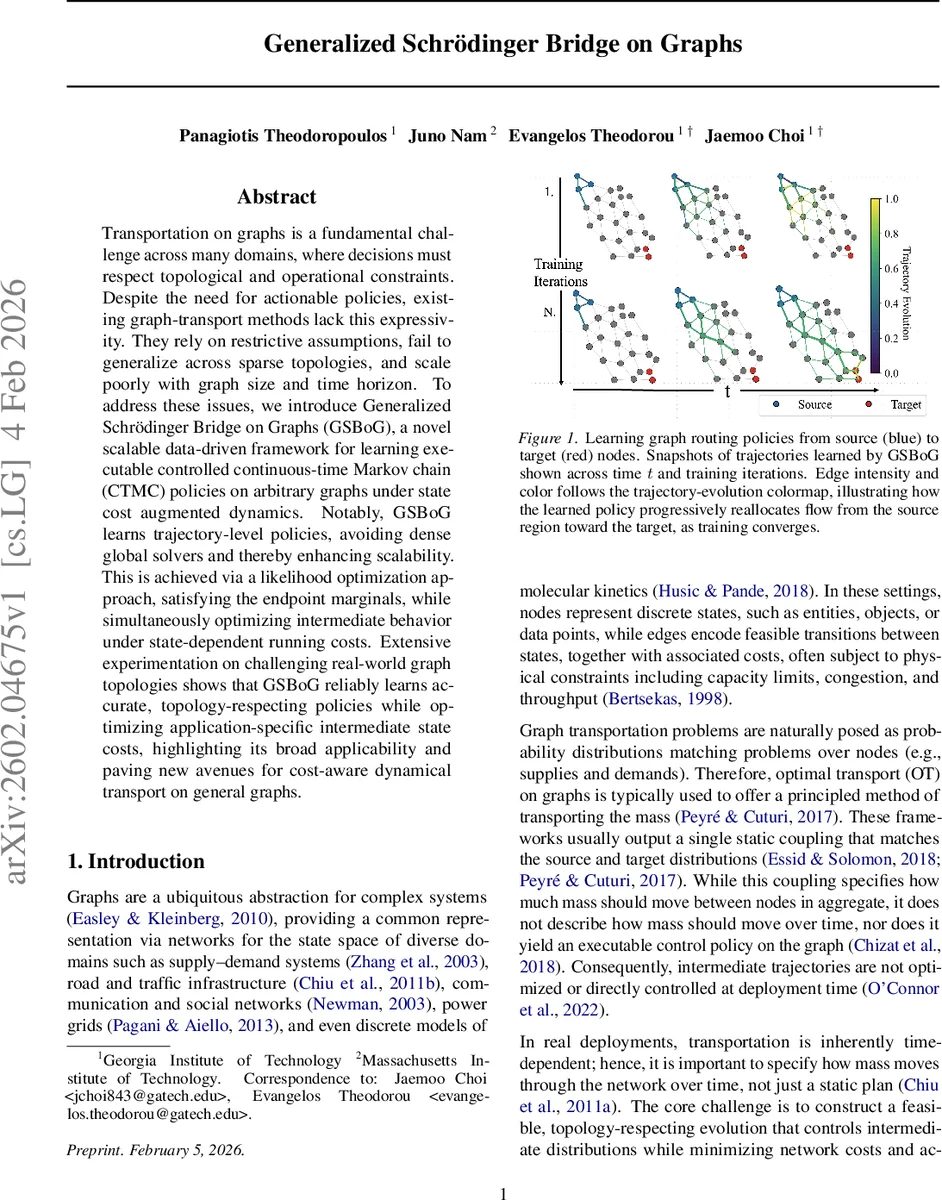
Transportation on graphs is a fundamental challenge across many domains, where decisions must respect topological and operational constraints. Despite the need for actionable policies, existing graph-transport methods lack this expressivity. They rely on restrictive assumptions, fail to generalize across sparse topologies, and scale poorly with graph size and time horizon. To address these issues, we introduce Generalized Schrödinger Bridge on Graphs (GSBoG), a novel scalable data-driven framework for learning executable controlled continuous-time Markov chain (CTMC) policies on arbitrary graphs under state cost augmented dynamics. Notably, GSBoG learns trajectory-level policies, avoiding dense global solvers and thereby enhancing scalability. This is achieved via a likelihood optimization approach, satisfying the endpoint marginals, while simultaneously optimizing intermediate behavior under state-dependent running costs. Extensive experimentation on challenging real-world graph topologies shows that GSBoG reliably learns accurate, topology-respecting policies while optimizing application-specific intermediate state costs, highlighting its broad applicability and paving new avenues for cost-aware dynamical transport on general graphs.
💡 Research Summary
The paper introduces Generalized Schrödinger Bridge on Graphs (GSBoG), a novel data‑driven framework for learning executable continuous‑time Markov chain (CTMC) policies that transport a source distribution µ to a target distribution ν over an arbitrary directed graph while minimizing a state‑ and distribution‑dependent running cost. Traditional graph‑based optimal transport methods either produce static couplings without temporal dynamics or rely on dynamic Schrödinger bridge formulations that require solving a global time‑expanded flow, leading to prohibitive memory and computational costs on large, sparse networks. GSBoG circumvents these limitations by learning trajectory‑level policies directly from sampled paths, thereby avoiding dense global solvers and achieving scalability.
Formally, the authors define a reference CTMC with transition‑rate matrix r(t) that respects the graph’s edge set. A controlled CTMC with rate matrix u(t) is sought, minimizing the objective
E_{p_u}
Comments & Academic Discussion
Loading comments...
Leave a Comment