Haptic bilateral teleoperation system for free-hand dental procedures
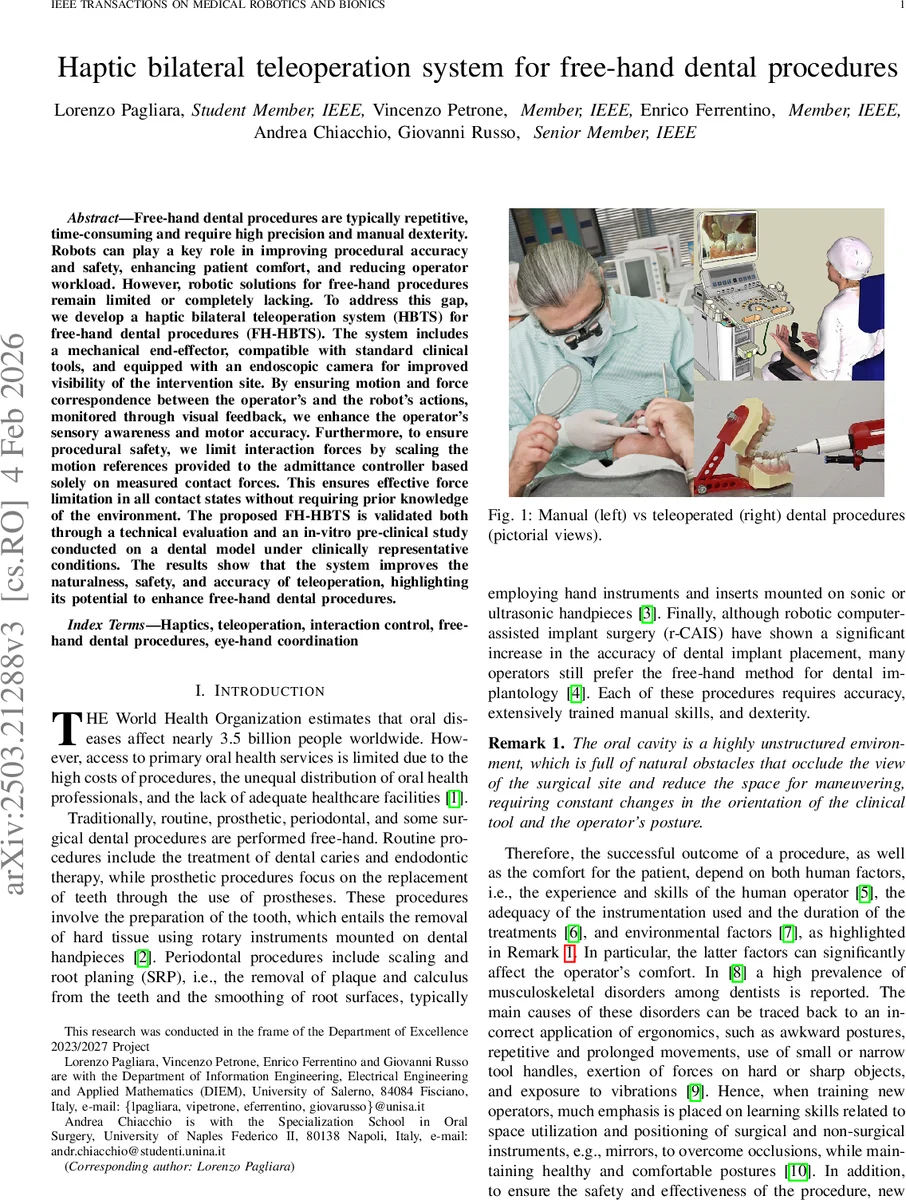
Free-hand dental procedures are typically repetitive, time-consuming and require high precision and manual dexterity. Robots can play a key role in improving procedural accuracy and safety, enhancing patient comfort, and reducing operator workload. However, robotic solutions for free-hand procedures remain limited or completely lacking. To address this gap, we develop a haptic bilateral teleoperation system (HBTS) for free-hand dental procedures (FH-HBTS). The system includes a mechanical end-effector, compatible with standard clinical tools, and equipped with an endoscopic camera for improved visibility of the intervention site. By ensuring motion and force correspondence between the operator’s and the robot’s actions, monitored through visual feedback, we enhance the operator’s sensory awareness and motor accuracy. Furthermore, to ensure procedural safety, we limit interaction forces by scaling the motion references provided to the admittance controller based solely on measured contact forces. This ensures effective force limitation in all contact states without requiring prior knowledge of the environment. The proposed FH-HBTS is validated both through a technical evaluation and an in-vitro pre-clinical study conducted on a dental model under clinically representative conditions. The results show that the system improves the naturalness, safety, and accuracy of teleoperation, highlighting its potential to enhance free-hand dental procedures.
💡 Research Summary
The paper addresses the lack of robotic assistance for routine, free‑hand dental procedures such as scaling, root planing, cavity preparation, and endodontic work. While robotic systems have been developed for implant placement, they are not suitable for the repetitive, dexterity‑intensive tasks that dominate daily dental practice. To fill this gap, the authors present a Haptic Bilateral Teleoperation System for Free‑hand Dental Procedures (FH‑HBTS). The system couples a master haptic device (HD) with a slave robot through a position‑position architecture that incorporates a passive spring‑damper element, guaranteeing intrinsic stability under negligible communication delay.
Key technical contributions are threefold. First, an eye‑hand coordination controller (EHCC) compensates for the rotation of an eye‑in‑hand endoscopic camera attached to the robot’s custom end‑effector. By applying real‑time kinematic transformations, the controller maintains a consistent visual field regardless of tool orientation, ensuring motion and force correspondence between the operator’s hand movements and the robot’s actions without drift over prolonged sessions. Second, a force‑limitation strategy based on admittance control scales the robot’s motion references directly from measured contact forces. This approach requires no prior knowledge of the oral environment or online geometry estimation, yet it effectively caps interaction forces in all contact states, enhancing safety while preserving transparency. Third, the mechanical end‑effector is designed to be compatible with standard clinical handpieces, integrating a miniature endoscopic camera and a six‑axis force/torque sensor, thereby allowing clinicians to use familiar tools while providing the robot with the necessary sensory feedback.
The system’s performance was evaluated in two stages. Technical tests measured position tracking error, force transmission latency, and overall teleoperation transparency, yielding sub‑millimeter accuracy (≈0.5 mm) and low force‑feedback delay (<15 ms). An in‑vitro pre‑clinical study was then conducted on a dental model replicating scaling and root planing (SRP) under clinically realistic conditions. Compared with conventional manual operation, the FH‑HBTS reduced task completion time by roughly 20 %, decreased occurrences of excessive contact forces (>1 N) by 70 %, and received positive subjective ratings regarding naturalness of control and visual accessibility.
The authors acknowledge limitations: the current implementation assumes negligible network delay, and while the architecture can be extended with time‑domain passivity control for adverse communication conditions, this was not explored experimentally. Moreover, validation was limited to SRP; future work should test the system on a broader range of free‑hand procedures and progress toward clinical trials.
In summary, the FH‑HBTS represents the first bilateral haptic teleoperation platform specifically engineered for free‑hand dental work. By integrating eye‑hand visual coordination, force‑based motion scaling, and a clinically compatible end‑effector, the system demonstrably improves accuracy, safety, and operator ergonomics. The work paves the way for broader adoption of robotic assistance in routine dentistry, potentially reducing practitioner fatigue, enhancing patient comfort, and expanding access to high‑quality oral care.
Comments & Academic Discussion
Loading comments...
Leave a Comment