Cholesky factorisation, and intrinsically sparse linear quadratic regulation
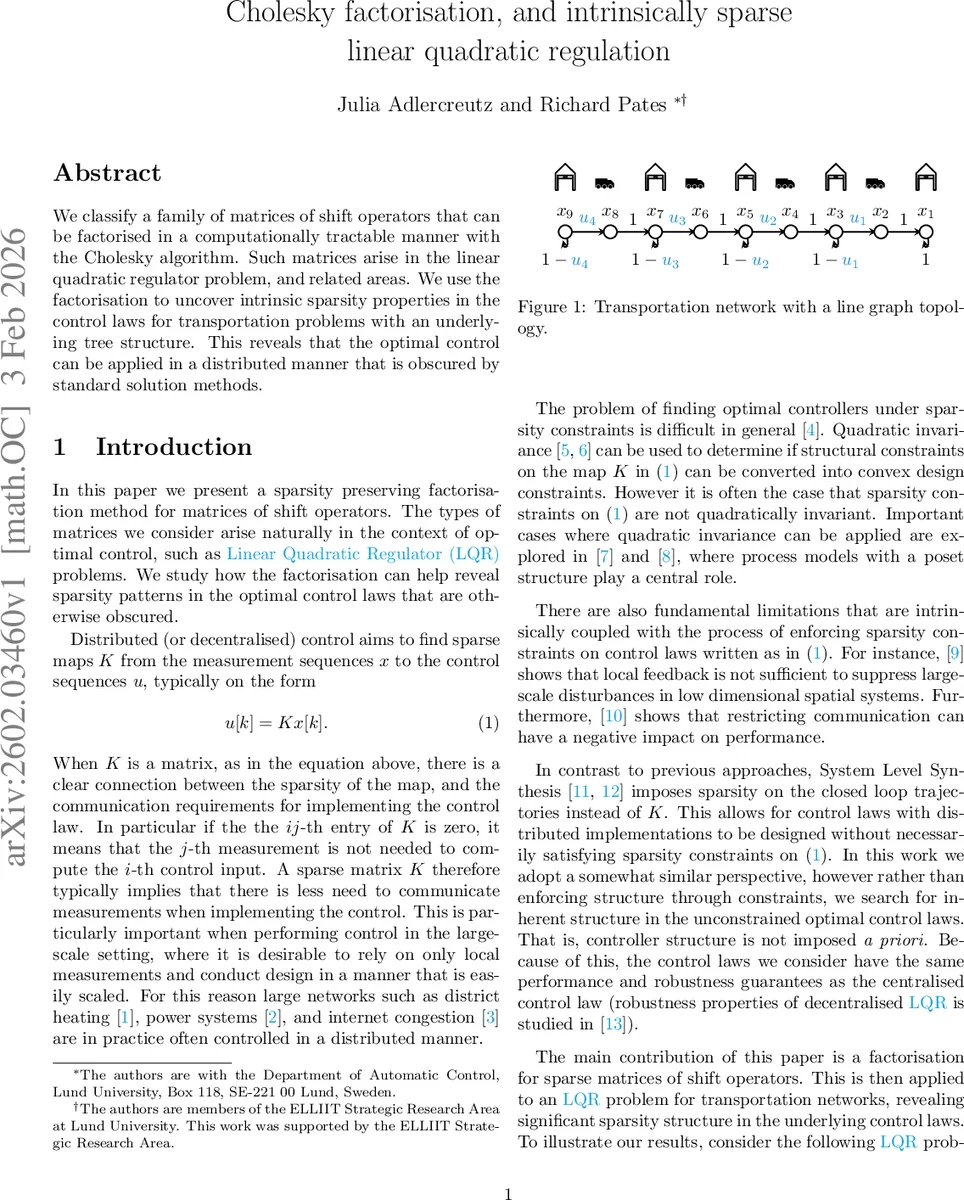
We classify a family of matrices of shift operators that can be factorised in a computationally tractable manner with the Cholesky algorithm. Such matrices arise in the linear quadratic regulator problem, and related areas. We use the factorisation to uncover intrinsic sparsity properties in the control laws for transportation problems with an underlying tree structure. This reveals that the optimal control can be applied in a distributed manner that is obscured by standard solution methods.
💡 Research Summary
The paper addresses a class of matrices whose entries are linear combinations of forward and backward shift operators acting on square‑summable sequences. Such matrices naturally arise in linear quadratic regulator (LQR) problems defined on networks whose underlying topology is a tree. The authors first introduce the forward shift operator (q) and its adjoint (q^{*}) on (\ell^{2}_{+}) and define two operator algebras: (R
Comments & Academic Discussion
Loading comments...
Leave a Comment