Manipulation via Force Distribution at Contact
Efficient and robust trajectories play a crucial role in contact-rich manipulation, which demands accurate mod- eling of object-robot interactions. Many existing approaches rely on point contact models due to their computational effi- ciency. Simple contact models are computationally efficient but inherently limited for achieving human-like, contact-rich ma- nipulation, as they fail to capture key frictional dynamics and torque generation observed in human manipulation. This study introduces a Force-Distributed Line Contact (FDLC) model in contact-rich manipulation and compares it against conventional point contact models. A bi-level optimization framework is constructed, in which the lower-level solves an optimization problem for contact force computation, and the upper-level optimization applies iLQR for trajectory optimization. Through this framework, the limitations of point contact are demon- strated, and the benefits of the FDLC in generating efficient and robust trajectories are established. The effectiveness of the proposed approach is validated by a box rotating task, demonstrating that FDLC enables trajectories generated via non-uniform force distributions along the contact line, while requiring lower control effort and less motion of the robot.
💡 Research Summary
The paper addresses a fundamental limitation of most model‑based contact‑rich manipulation methods: the reliance on point‑contact models for computational tractability. While point contacts are cheap to evaluate, they cannot generate torque directly and therefore require continuous sliding or large end‑effector motions to rotate an object. To overcome this, the authors introduce a Force‑Distributed Line Contact (FDLC) model that approximates a line contact by two point contacts linked with a virtual spring‑damper (stiffness k, damping c, rest length L). This formulation permits the two points to exert independent, non‑uniform forces, thereby creating torque through force distribution alone without moving the contact location.
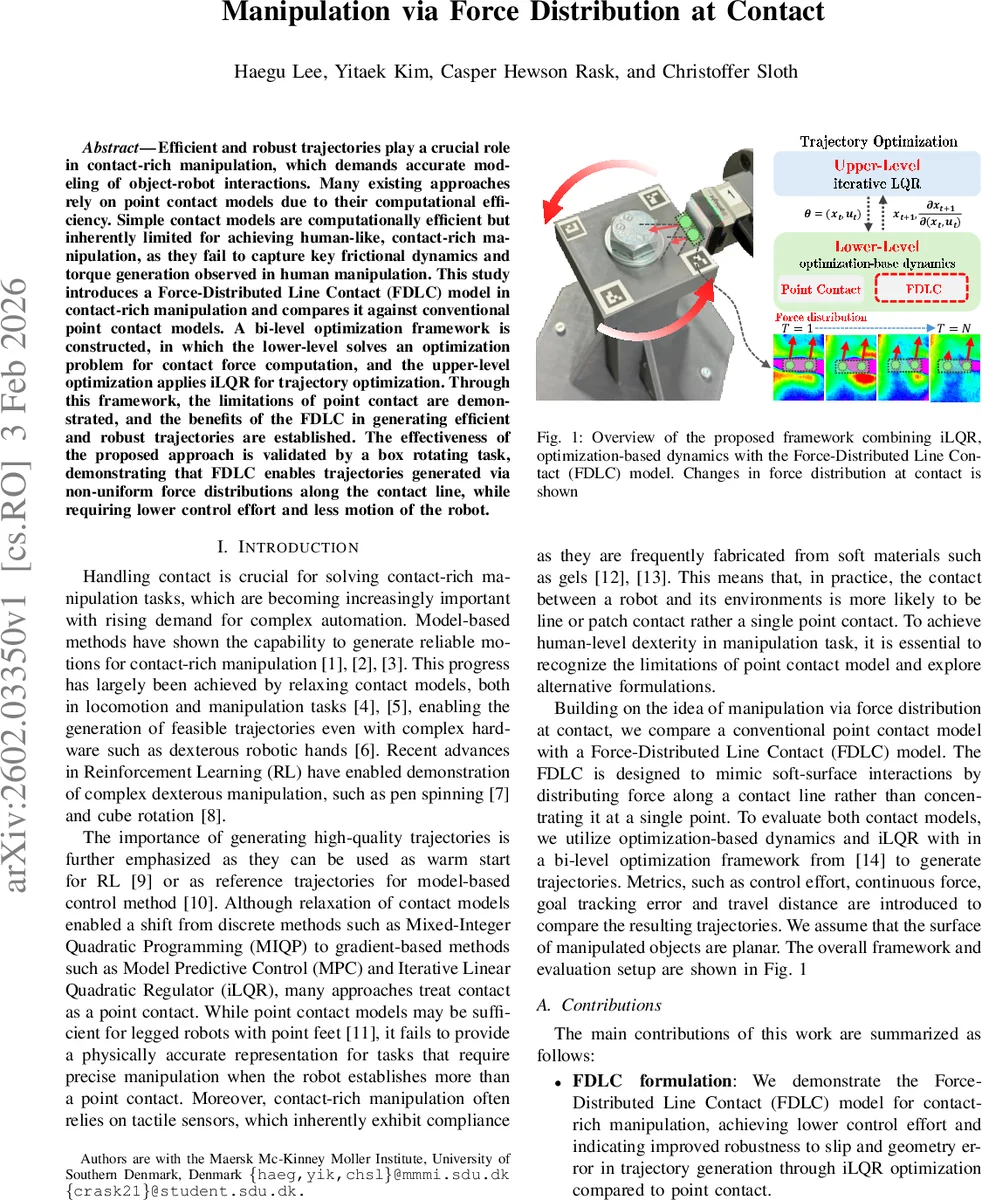
The overall trajectory generation framework is a bi‑level optimization. The lower level solves a constrained optimization that enforces the system dynamics and contact constraints (normal/tangential forces, friction cone). The solution provides the next state and the Jacobians ∂xₜ₊₁/∂xₜ, ∂xₜ₊₁/∂uₜ via implicit‑function theorem differentiation. The upper level employs iterative Linear Quadratic Regulator (iLQR) to minimize a quadratic cost on states and controls, plus a weighted signed‑distance penalty that keeps the robot close to the object. This structure allows gradient‑based trajectory optimization while handling the non‑smooth contact physics implicitly.
The authors evaluate the FDLC against a conventional point‑contact model on a planar box‑rotation task. The box (1 kg, 2 cm side) rests on a high‑friction surface (μₛ = 1.0). A circular pusher pushes the box; for FDLC the pusher is represented by two contact points connected by the spring‑damper. Target rotations of 10°, 20°, 30°, 40° are achieved within a horizon of 26 timesteps (Δt = 0.05 s). Identical physical parameters and initial control inputs are used for both models.
Results show that FDLC trajectories feature a high initial control input that quickly drops as the box begins to rotate, because the torque is generated directly by the asymmetric force distribution. In contrast, point‑contact trajectories require a relatively constant control effort throughout the horizon, as torque must be produced by sliding the contact point to create a lever arm. Quantitatively, FDLC reduces accumulated control effort by roughly 20‑30 % and shortens the robot’s travel distance by a similar margin across all target angles. Moreover, FDLC maintains continuous contact forces up to the moment the desired angle is reached, indicating better robustness to slip and to geometric uncertainties. The authors also conduct real‑robot experiments that confirm the simulated advantages: lower actuator currents and smaller end‑effector motions are observed when executing FDLC‑generated trajectories.
Key insights include: (1) Modeling contact as a line with force distribution dramatically improves torque efficiency; (2) The bi‑level + iLQR scheme successfully integrates complex contact constraints while preserving gradient‑based optimization; (3) FDLC’s inherent compliance (spring‑damper) provides robustness against friction variations and surface irregularities, reducing the need for large motions that cause wear and energy waste.
The paper contributes a mathematically clear FDLC formulation, a demonstration of its superiority in both simulation and hardware, and a practical optimization pipeline that can be extended to richer contact representations (more points, 3‑D patches). Future work is suggested on scaling the model to multi‑point contacts, incorporating deformable‑object dynamics, and accelerating the lower‑level solver for real‑time deployment.
Comments & Academic Discussion
Loading comments...
Leave a Comment