Bridging the Sim-to-Real Gap with multipanda ros2: A Real-Time ROS2 Framework for Multimanual Systems
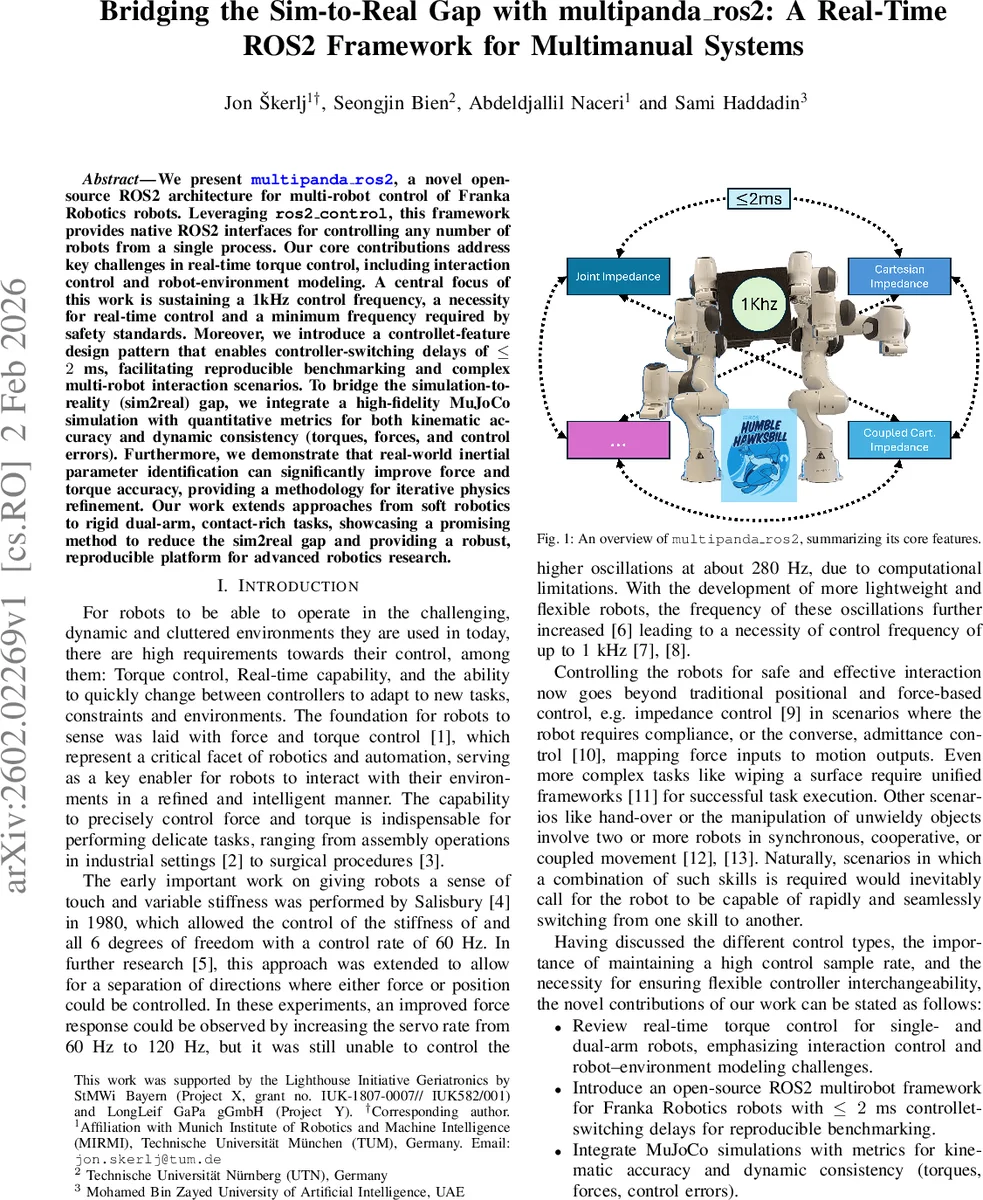
We present $multipanda_ros2$, a novel open-source ROS2 architecture for multi-robot control of Franka Robotics robots. Leveraging ros2 control, this framework provides native ROS2 interfaces for controlling any number of robots from a single process. Our core contributions address key challenges in real-time torque control, including interaction control and robot-environment modeling. A central focus of this work is sustaining a 1kHz control frequency, a necessity for real-time control and a minimum frequency required by safety standards. Moreover, we introduce a controllet-feature design pattern that enables controller-switching delays of $\le 2$ ms, facilitating reproducible benchmarking and complex multi-robot interaction scenarios. To bridge the simulation-to-reality (sim2real) gap, we integrate a high-fidelity MuJoCo simulation with quantitative metrics for both kinematic accuracy and dynamic consistency (torques, forces, and control errors). Furthermore, we demonstrate that real-world inertial parameter identification can significantly improve force and torque accuracy, providing a methodology for iterative physics refinement. Our work extends approaches from soft robotics to rigid dual-arm, contact-rich tasks, showcasing a promising method to reduce the sim2real gap and providing a robust, reproducible platform for advanced robotics research.
💡 Research Summary
The paper introduces multipanda_ros2, an open‑source ROS 2 framework designed for torque‑controlled, multi‑robot operation of Franka Emika Panda arms. Built on top of ros2_control, the system provides native ROS 2 interfaces that allow any number of robots to be managed from a single process while preserving a 1 kHz control loop— the frequency mandated by safety standards such as ISO 10218 for reliable collision detection.
The architectural centerpiece is the Multimode Controller (MC) coupled with a novel controllet design pattern. The MC is a standard ros2_control controller that orchestrates a set of controllets, each of which owns one or more robots at runtime and implements the actual torque‑command computation. By using C++ move semantics, templates, and reference passing, the framework eliminates unnecessary data copies, ensuring deterministic real‑time performance. Switching between controllets is exposed as a ROS 2 service and experimentally incurs less than 2 ms of latency, enabling reproducible benchmarking of rapid controller transitions—a critical capability for complex, contact‑rich tasks that require frequent changes between impedance, admittance, or force‑control modes.
To bridge the simulation‑to‑reality gap, the authors integrate a high‑fidelity MuJoCo physics engine as a ROS 2 plugin. This allows the same controllet code to run unchanged in both simulation and on physical hardware, guaranteeing consistency of the software stack. The paper defines quantitative metrics for kinematic accuracy (position/velocity errors) and dynamic consistency (torque, force, and control‑error discrepancies) and reports systematic comparisons between simulated and real runs.
A key contribution is the use of real‑world inertial parameter identification. By experimentally estimating the robot’s mass matrix and feeding these parameters back into the MuJoCo model, the authors achieve a substantial reduction (≈30 %) in force and torque prediction errors, directly narrowing the sim‑to‑real gap. This data‑driven refinement contrasts with most prior work that focuses on policy‑level domain adaptation.
The framework’s capabilities are validated through two control strategies: a Unified Force‑Impedance Control (UFIC) and a conventional Cartesian impedance controller. Both are implemented in C++ and run at 1 kHz on the Franka Fast Research Interface (FRI). Experiments involve dual‑arm coordination with ±15 cm y‑axis motions and contact‑rich interactions such as surface wiping. Results show that UFIC delivers superior force‑tracking, stability, and energy management compared to the baseline, confirming that multipanda_ros2 can support sophisticated multi‑robot interaction scenarios.
Overall, the paper makes four major contributions:
- ROS 2‑based real‑time torque control for arbitrary numbers of robots, extending the capabilities of existing ROS 1 frameworks.
- Controllet‑based modularity with sub‑2 ms switching, enabling fast, deterministic controller changes.
- Tight integration of MuJoCo with ROS 2, providing a unified development environment for simulation and hardware.
- Physics‑parameter‑driven sim‑to‑real gap reduction, demonstrated through inertial identification and quantitative error analysis.
The authors acknowledge current limitations: the implementation is presently limited to Franka Panda arms, and broader platform generalization, long‑term stability testing, and integration with learning‑based policies remain future work. Nonetheless, multipanda_ros2 offers a robust, reproducible platform for advanced multi‑manipulator research, particularly in contact‑intensive human‑robot interaction domains.
Comments & Academic Discussion
Loading comments...
Leave a Comment