Real-Time Loop Closure Detection in Visual SLAM via NetVLAD and Faiss
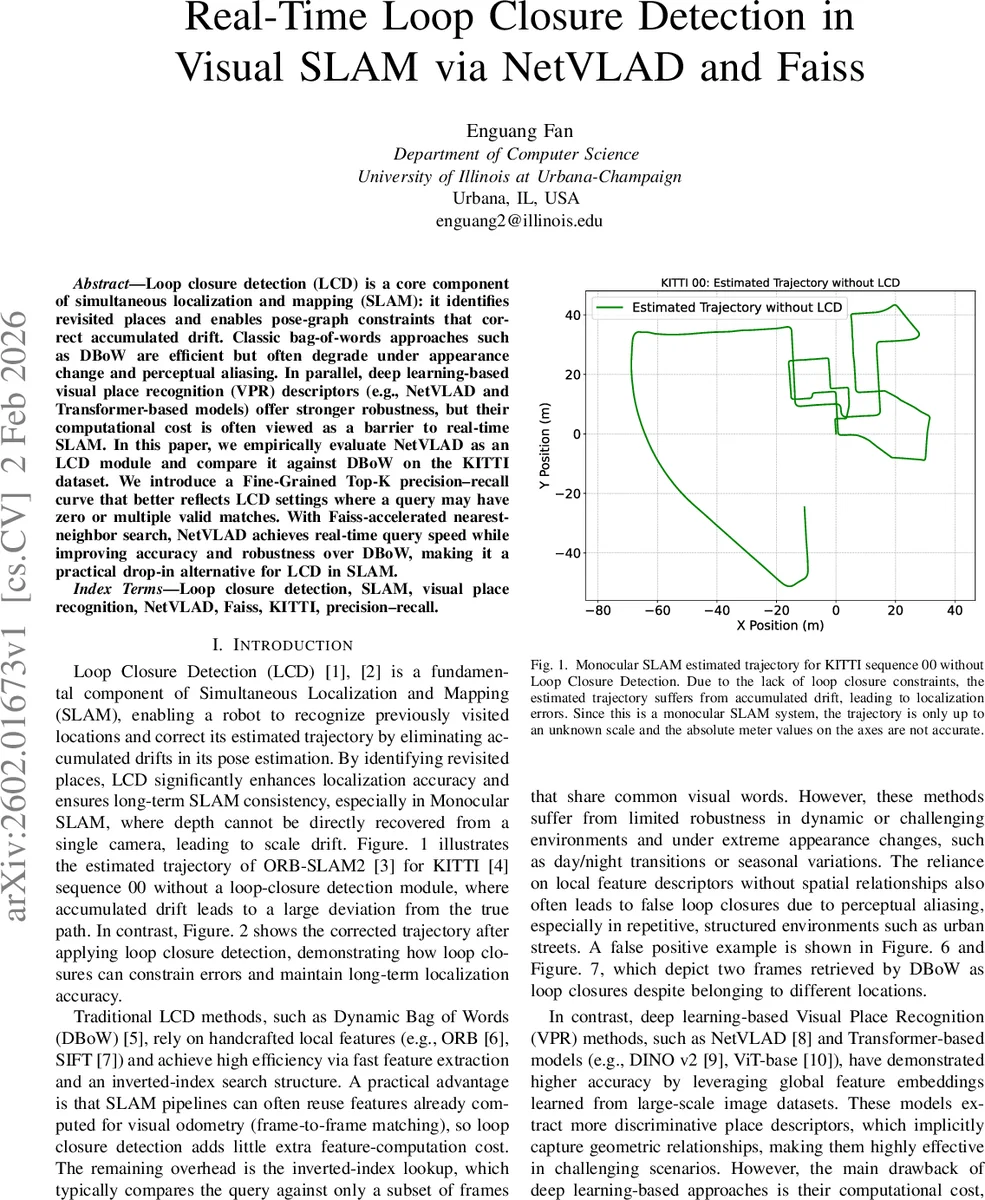
Loop closure detection (LCD) is a core component of simultaneous localization and mapping (SLAM): it identifies revisited places and enables pose-graph constraints that correct accumulated drift. Classic bag-of-words approaches such as DBoW are efficient but often degrade under appearance change and perceptual aliasing. In parallel, deep learning-based visual place recognition (VPR) descriptors (e.g., NetVLAD and Transformer-based models) offer stronger robustness, but their computational cost is often viewed as a barrier to real-time SLAM. In this paper, we empirically evaluate NetVLAD as an LCD module and compare it against DBoW on the KITTI dataset. We introduce a Fine-Grained Top-K precision-recall curve that better reflects LCD settings where a query may have zero or multiple valid matches. With Faiss-accelerated nearestneighbor search, NetVLAD achieves real-time query speed while improving accuracy and robustness over DBoW, making it a practical drop-in alternative for LCD in SLAM.
💡 Research Summary
This paper presents a comprehensive empirical study that challenges the conventional wisdom in Visual SLAM’s loop closure detection (LCD). It addresses the long-standing trade-off between robustness and real-time performance by successfully integrating a powerful deep learning-based visual place recognition (VPR) technique, NetVLAD, into a real-time SLAM pipeline.
The core problem identified is that while traditional LCD methods like Dynamic Bag-of-Words (DBoW) are highly efficient due to their inverted-index search and reuse of odometry features, they suffer from perceptual aliasing and degradation under significant appearance changes (e.g., day/night, seasonal variations). Conversely, deep learning descriptors like NetVLAD offer superior robustness by learning global, viewpoint-invariant features from data but are typically considered too computationally heavy for real-time SLAM due to the exhaustive nearest-neighbor search required for their high-dimensional embeddings.
The authors’ primary contribution is a methodology that dismantles this barrier. They replace the DBoW module with a NetVLAD descriptor extractor and, crucially, employ the Faiss library for highly optimized approximate nearest-neighbor search. This combination allows the NetVLAD-based LCD to achieve query speeds comparable to DBoW, making real-time operation feasible without sacrificing the accuracy benefits of deep learning.
A second major contribution is the proposal of a novel evaluation metric tailored for LCD: the Fine-Grained Top-K Precision-Recall curve. The paper argues that standard VPR evaluation metrics like Recall@N are misaligned with LCD’s needs. In LCD, a query may have zero, one, or multiple valid ground-truth matches (any past frame within a pose threshold), and false positives can be filtered by subsequent geometric verification. The proposed metric evaluates each of the top-K retrieved candidates individually against the ground truth, providing a more nuanced and realistic assessment of an LCD module’s retrieval performance before geometric checks.
The system is evaluated on the standard KITTI dataset. The SLAM pipeline incorporates keyframe selection, NetVLAD feature extraction, Faiss-accelerated candidate retrieval, and a temporal consistency check to group consecutive frame matches for robustness. Results demonstrate that the NetVLAD+Faiss approach not only meets real-time performance benchmarks but also significantly outperforms DBoW in accuracy, particularly in challenging conditions. The paper includes visualizations such as a frame-to-frame similarity heatmap from NetVLAD descriptors, clearly showing high-similarity regions corresponding to loop closures.
In conclusion, this work effectively bridges the gap between high-accuracy deep learning models and the stringent efficiency requirements of robotic SLAM. It demonstrates that with proper engineering, specifically using dedicated acceleration tools like Faiss, advanced VPR descriptors can be a practical “drop-in” replacement for traditional LCD methods, offering enhanced robustness and accuracy for long-term autonomous operation in changing environments.
Comments & Academic Discussion
Loading comments...
Leave a Comment