Robust Trajectory Tracking of Autonomous Surface Vehicle via Lie Algebraic Online MPC
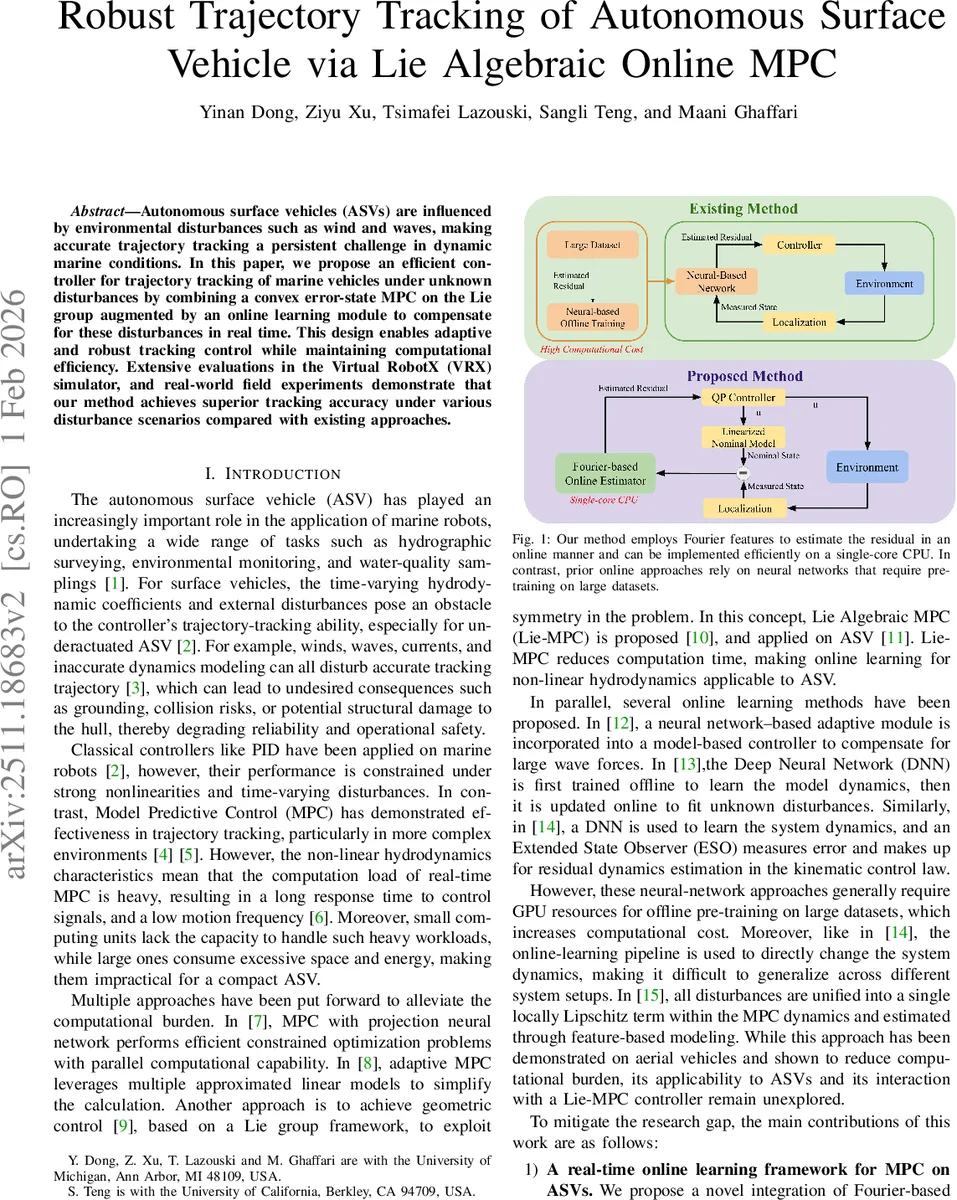
Autonomous surface vehicles (ASVs) are influenced by environmental disturbances such as wind and waves, making accurate trajectory tracking a persistent challenge in dynamic marine conditions. In this paper, we propose an efficient controller for trajectory tracking of marine vehicles under unknown disturbances by combining a convex error-state MPC on the Lie group augmented by an online learning module to compensate for these disturbances in real time. This design enables adaptive and robust tracking control while maintaining computational efficiency. Extensive evaluations in the Virtual RobotX (VRX) simulator, and real-world field experiments demonstrate that our method achieves superior tracking accuracy under various disturbance scenarios compared with existing approaches.
💡 Research Summary
This paper addresses the persistent challenge of accurate trajectory tracking for autonomous surface vehicles (ASVs) operating under strong environmental disturbances such as wind, waves, and currents. The authors propose a novel control architecture that tightly integrates a convex error‑state Model Predictive Control (MPC) formulated on the Lie group SE(3) with an online disturbance‑learning module based on Fourier feature representations.
The vehicle dynamics are modeled using Fossen’s 6‑DOF hydrodynamic equations and expressed on the matrix Lie group SE(3). By defining the left‑invariant error Ψ = X_d⁻¹X and linearizing it in the Lie algebra se(3), the authors obtain an error‑state vector x =
Comments & Academic Discussion
Loading comments...
Leave a Comment