Large-Scale Autonomous Gas Monitoring for Volcanic Environments: A Legged Robot on Mount Etna
Volcanic gas emissions are key precursors of eruptive activity. Yet, obtaining accurate near-surface measurements remains hazardous and logistically challenging, motivating the need for autonomous solutions. Limited mobility in rough volcanic terrain has prevented wheeled systems from performing reliable in situ gas measurements, reducing their usefulness as sensing platforms. We present a legged robotic system for autonomous volcanic gas analysis, utilizing the quadruped ANYmal, equipped with a quadrupole mass spectrometer system. Our modular autonomy stack integrates a mission planning interface, global planner, localization framework, and terrain-aware local navigation. We evaluated the system on Mount Etna across three autonomous missions in varied terrain, achieving successful gas-source detections with autonomy rates of 93-100%. In addition, we conducted a teleoperated mission in which the robot measured natural fumaroles, detecting sulfur dioxide and carbon dioxide. We discuss lessons learned from the gas-analysis and autonomy perspectives, emphasizing the need for adaptive sensing strategies, tighter integration of global and local planning, and improved hardware design.
💡 Research Summary
This paper presents a fully autonomous field‑tested system for in‑situ volcanic gas monitoring that combines the ANYmal quadruped robot with a compact quadrupole mass spectrometer (INFICON Transpector MPH). The authors address the critical need for near‑source gas measurements in hazardous volcanic environments, where traditional fixed sensor networks, UAV plume sampling, or wheeled ground vehicles are limited by terrain accessibility, safety concerns, and dilution of gas concentrations.
The hardware platform consists of the 50 kg ANYmal robot, capable of traversing steep slopes, loose tephra, lava ridges, and boulder fields thanks to its six‑actuated joints per leg and a 12 kg payload capacity. Perception sensors include six RealSense D435i depth cameras, a Velodyne VLP‑16 LiDAR, two FLIR Blackfly RGB cameras, and a Swift Navigation Piksi Multi GNSS receiver (non‑RTK). The mass‑spectrometer subsystem weighs 8.7 kg, consumes 36 W, and is housed in a 3 kg aluminum roll‑cage for impact protection. Gas sampling is performed through a 1 m stainless‑steel capillary that feeds atmospheric air into a two‑stage vacuum system (diaphragm pump followed by a miniature turbomolecular pump) achieving ~10⁻⁷ bar. The spectrometer provides a mass range of 1–200 amu, a detection limit below 1 ppm, and a 3 s response time, allowing detection of key volcanic species such as SO₂ (64 amu), CO₂ (44 amu), He (4 amu), and H₂ (2 amu).
The software architecture is organized into a hierarchical autonomy stack. A mission‑planning GUI lets operators place waypoints on satellite or drone‑derived orthomosaics (OpenStreetMap topography layer). An A* global planner operates on an offline‑generated road‑network graph (OSMnx) to produce a geodetic path (latitude, longitude, altitude). State estimation fuses non‑RTK GNSS, LiDAR‑SLAM (degeneracy‑aware X‑ICP), and the robot’s internal kinematic‑inertial odometry using the Holistic Fusion framework, delivering robust 6‑DoF poses even when GNSS is intermittent. The global path is transformed into the robot’s local frame, and a look‑ahead waypoint is supplied to a terrain‑aware local planner that consumes an elevation map (derived from LiDAR) and traversability analysis. The local planner generates a short‑horizon trajectory, which is executed by a reinforcement‑learning based locomotion controller that commands individual joint torques. Real‑time telemetry, including SLAM maps, camera feeds, and mass‑spectrometer data, is visualized in a supervision interface for operator awareness.
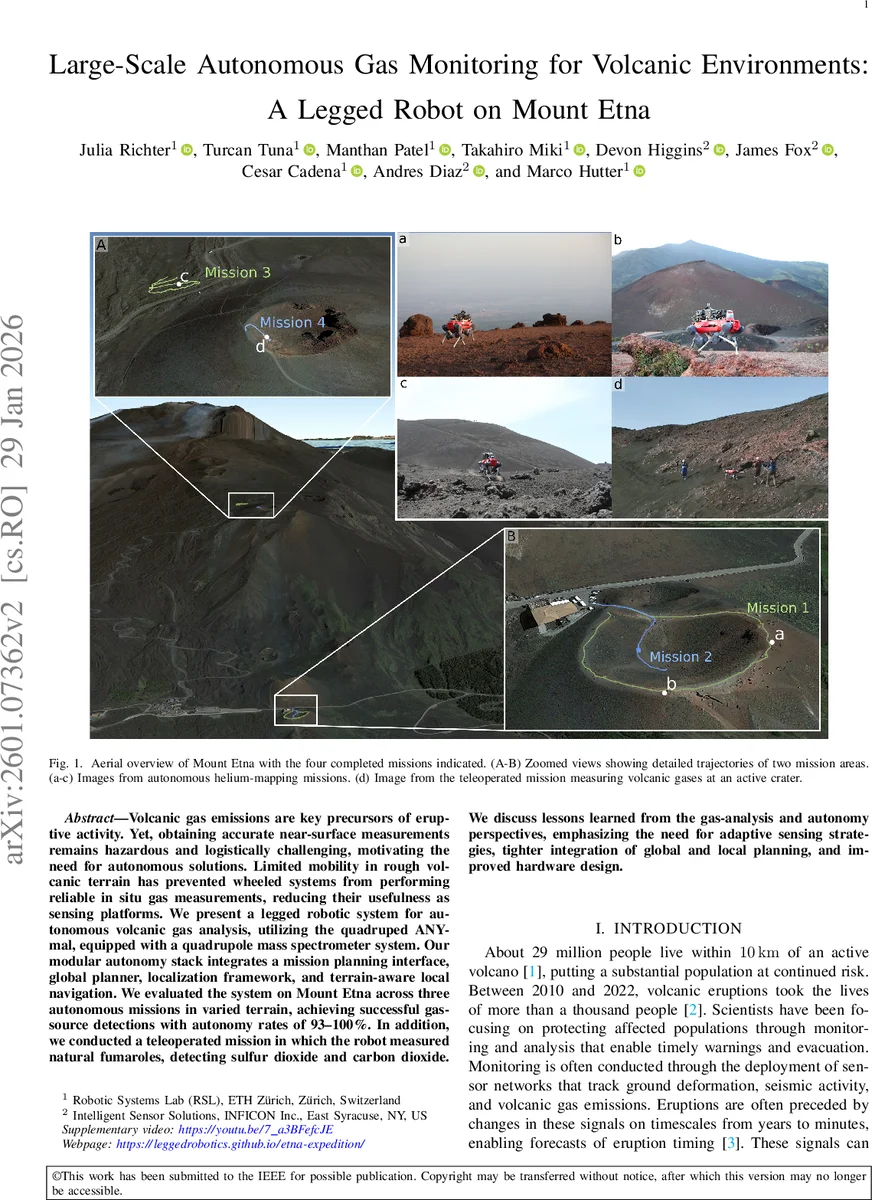
Field validation was conducted on Mount Etna in four missions: three fully autonomous runs across varied terrain and one teleoperated run targeting an active crater. Autonomous missions achieved 93 %–100 % success rates in reaching predefined sampling locations and acquiring valid gas spectra. The teleoperated mission successfully measured SO₂ and CO₂ directly from fumaroles, confirming the spectrometer’s capability in a real volcanic plume. Gas concentration profiles showed clear peaks at source proximity, demonstrating the necessity of near‑source sampling that wheeled platforms or UAVs cannot reliably provide.
The authors discuss three primary lessons learned. First, adaptive sensing strategies are required: sampling frequency should be modulated based on real‑time concentration estimates to balance data richness and power consumption. Second, tighter integration between global and local planners is needed so that local obstacle avoidance can trigger dynamic replanning of the global route, improving robustness in rapidly changing terrain. Third, hardware refinements—such as reducing the mass and power draw of the vacuum inlet and pump, and streamlining the capillary design—could extend operational endurance beyond the current ~1 hour limit.
In conclusion, this work delivers the first successful demonstration of a legged robot performing autonomous, source‑proximal volcanic gas analysis on an active volcano. By merging high‑performance mass spectrometry with terrain‑adaptive autonomy, the system offers volcanologists a safe, rapid, and spatially extensive tool for monitoring gas precursors of eruptions. The insights and design principles presented are applicable to a broad range of hazardous‑environment sensing tasks, including chemical plant inspections, radiological surveys, and other geophysical monitoring scenarios.
Comments & Academic Discussion
Loading comments...
Leave a Comment