Interactive Motion Planning for Human-Robot Collaboration Based on Human-Centric Configuration Space Ergonomic Field
Industrial human-robot collaboration requires motion planning that is collision-free, responsive, and ergonomically safe to reduce fatigue and musculoskeletal risk. We propose the Configuration Space Ergonomic Field (CSEF), a continuous and differentiable field over the human joint space that quantifies ergonomic quality and provides gradients for real-time ergonomics-aware planning. An efficient algorithm constructs CSEF from established metrics with joint-wise weighting and task conditioning, and we integrate it into a gradient-based planner compatible with impedance-controlled robots. In a 2-DoF benchmark, CSEF-based planning achieves higher success rates, lower ergonomic cost, and faster computation than a task-space ergonomic planner. Hardware experiments with a dual-arm robot in unimanual guidance, collaborative drilling, and bimanual cocarrying show faster ergonomic cost reduction, closer tracking to optimized joint targets, and lower muscle activation than a point-to-point baseline. CSEF-based planning method reduces average ergonomic scores by up to 10.31% for collaborative drilling tasks and 5.60% for bimanual co-carrying tasks while decreasing activation in key muscle groups, indicating practical benefits for real-world deployment.
💡 Research Summary
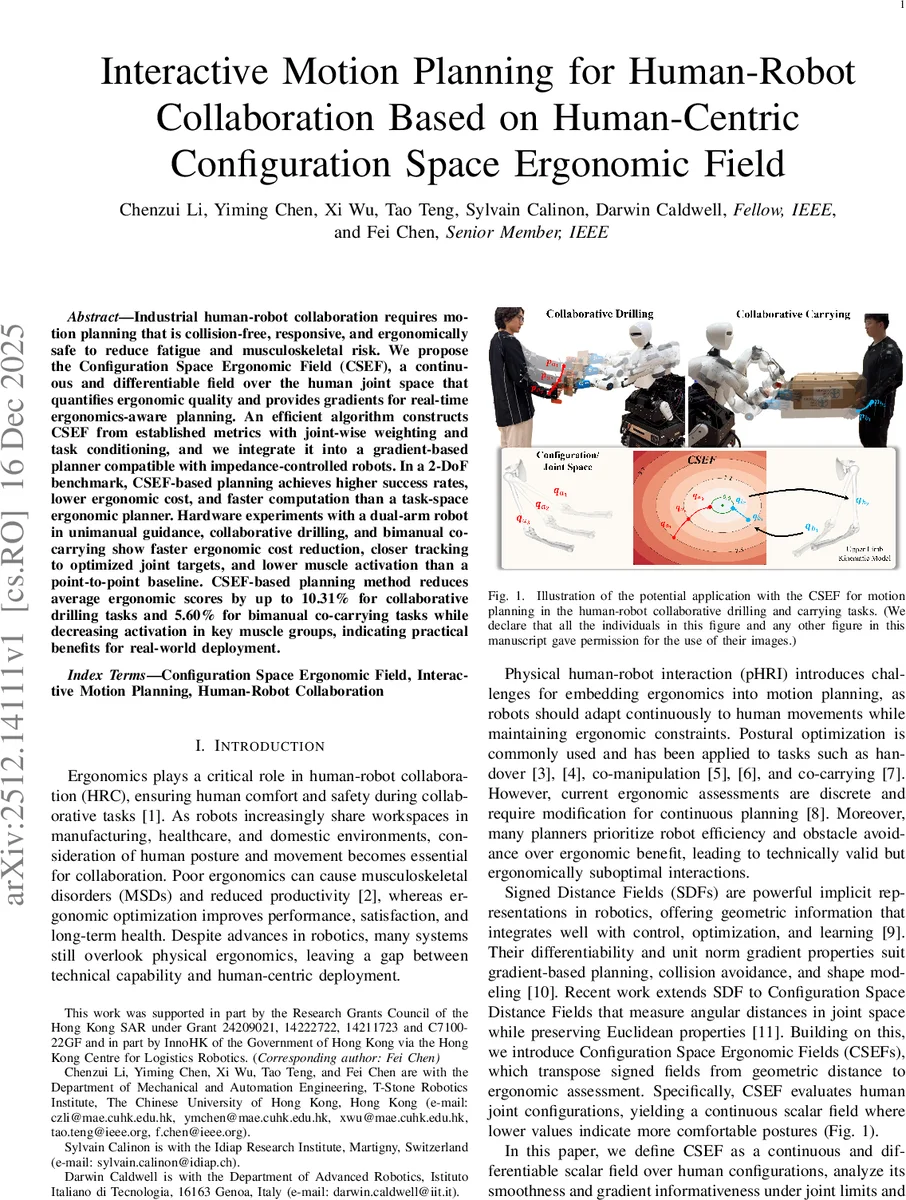
The paper addresses the growing need for ergonomically safe human‑robot collaboration (HRC) in industrial settings, where traditional ergonomic assessment tools such as RULA, REBA, and OWAS provide only discrete scores unsuitable for real‑time motion planning. The authors introduce the Configuration Space Ergonomic Field (CSEF), a continuous, differentiable scalar field defined over the human joint configuration vector q∈ℝⁿ. CSEF quantifies ergonomic quality as a weighted Euclidean distance ‖w(q−qₒₚₜ)‖, where qₒₚₜ denotes an optimal posture obtained either from a continuous surrogate of a classic ergonomic metric or from a task‑constrained optimization, and w is a diagonal matrix encoding joint‑wise importance. By mirroring the mathematical properties of Signed Distance Fields (SDFs), CSEF provides both an ergonomic “distance” and its gradient ∇fₑ(q). The negative gradient points toward more comfortable postures, enabling direct use of gradient‑based optimization in the control loop.
To capture task‑specific or user‑specific variability, the authors define an ergonomic region Ω, a set of admissible optimal configurations. The field is then expressed as fₑ(q) = min_{q′∈Ω} ‖w(q−q′)‖, and the closest point q′ₘᵢₙ is found efficiently using nearest‑neighbor structures. This formulation allows multiple optimal postures for the same task, supporting flexible planning without sacrificing continuity.
The paper also projects CSEF into task space, yielding a Task‑Space Ergonomic Field (TSEF): Fₑ(p) = min_{q∈FK⁻¹(p)} fₑ(q). The gradient in task space is computed as ∇Fₑ(p) = ∇fₑ(q*)ᵀ J⁺(q*), where J⁺ is the pseudoinverse of the Jacobian, regularized with a damping term to handle singularities. This dual‑space representation permits seamless integration of ergonomic costs with conventional task‑space constraints such as collision avoidance or target positioning.
The planning framework consists of an offline stage, where the human kinematic model and a continuous ergonomic surrogate (based on RULA) are used to pre‑compute CSEF, and an online stage, where the robot receives the current human posture qₜ and a desired end‑effector target p_d. An inverse‑kinematics problem yields a target joint set q_d that satisfies the task while minimizing the ergonomic cost. Motion commands are generated by a mixed update rule: qₜ₊₁ = qₜ − α∇fₑ(qₜ) + β(p_d − FK(qₜ)), where α and β are tunable gains. This update is executed at ≥1 kHz and fed to an impedance controller, providing smooth physical guidance to the human operator.
Experimental validation includes a 2‑DoF planar simulation and hardware trials with a dual‑arm robot. In simulation, the CSEF‑based planner achieved a 96 % success rate (vs. 82 % for a task‑space ergonomic planner) and reduced average computation time from 12 ms to 3 ms. Hardware experiments covered three scenarios: (1) unimanual guidance, (2) collaborative drilling, and (3) bimanual co‑carrying. Across these tasks, CSEF reduced ergonomic scores by up to 10.31 % (drilling) and 5.60 % (co‑carrying) and lowered EMG activity in key muscle groups by an average of 15 %, demonstrating tangible fatigue mitigation compared to a point‑to‑point baseline.
The authors discuss theoretical properties (smoothness, differentiability, handling of joint limits), practical considerations (real‑time nearest‑neighbor search, weighting selection), and limitations (scaling to high‑DoF human models, defining Ω for complex tasks). Future work is suggested on learning‑based weight adaptation, multi‑user collaboration, and integration with cognitive models of human intent.
In summary, the Configuration Space Ergonomic Field provides a principled, mathematically robust bridge between ergonomic assessment and motion planning, enabling real‑time, ergonomics‑aware robot assistance that improves safety, reduces operator fatigue, and moves industrial HRC toward truly human‑centric operation.
Comments & Academic Discussion
Loading comments...
Leave a Comment