Cross-Entropy Optimization of Physically Grounded Task and Motion Plans
Autonomously performing tasks often requires robots to plan high-level discrete actions and continuous low-level motions to realize them. Previous TAMP algorithms have focused mainly on computational performance, completeness, or optimality by making the problem tractable through simplifications and abstractions. However, this comes at the cost of the resulting plans potentially failing to account for the dynamics or complex contacts necessary to reliably perform the task when object manipulation is required. Additionally, approaches that ignore effects of the low-level controllers may not obtain optimal or feasible plan realizations for the real system. We investigate the use of a GPU-parallelized physics simulator to compute realizations of plans with motion controllers, explicitly accounting for dynamics, and considering contacts with the environment. Using cross-entropy optimization, we sample the parameters of the controllers, or actions, to obtain low-cost solutions. Since our approach uses the same controllers as the real system, the robot can directly execute the computed plans. We demonstrate our approach for a set of tasks where the robot is able to exploit the environment’s geometry to move an object. Website and code: https://andreumatoses.github.io/research/parallel-realization
💡 Research Summary
The fundamental challenge in autonomous robotics lies in the seamless integration of high-level task planning (discrete logical steps) and low-level motion planning (continuous physical trajectories), a field known as Task and Motion Planning (TAMP). Traditionally, TAMP algorithms have prioritized computational tractability, often achieving this by employing significant abstractions and simplifications of the physical world. While these methods are efficient, they frequently fail to account for complex dynamics, friction, and intricate contact mechanics. Consequently, a plan that appears feasible in an abstract mathematical model often fails during real-world execution because the robot cannot handle the unmodeled physical interactions.
This paper proposes a novel approach to TAMP that is “physically grounded,” meaning it explicitly incorporates the complex physics of the environment into the planning process. The researchers leverage a GPU-parallelized physics simulator to evaluate various plan realizations. By utilizing the massive parallel processing power of GPUs, the framework can simulate a vast number of potential trajectories and interactions simultaneously, accounting for essential elements such as object dynamics and environmental contacts.
The core optimization engine of this framework is the Cross-Entropy Method (CEM). Instead of searching for a path in a simplified configuration space, the algorithm optimizes the parameters of the robot’s low-level controllers. The process involves sampling controller parameters, executing them within the high-fidelity physics simulator, and evaluating the resulting “cost” based on task success and efficiency. Through iterative refinement, the distribution of sampled parameters is updated to converge toward low-cost, physically viable solutions.
A significant contribution of this work is its high degree of Sim-to-Real compatibility. Because the optimization process directly manipulates the same controller parameters used in the physical robot, the gap between simulation and reality is drastically reduced. The robot can execute the computed plans directly on the real hardware without the need for extensive retraining or domain adaptation.
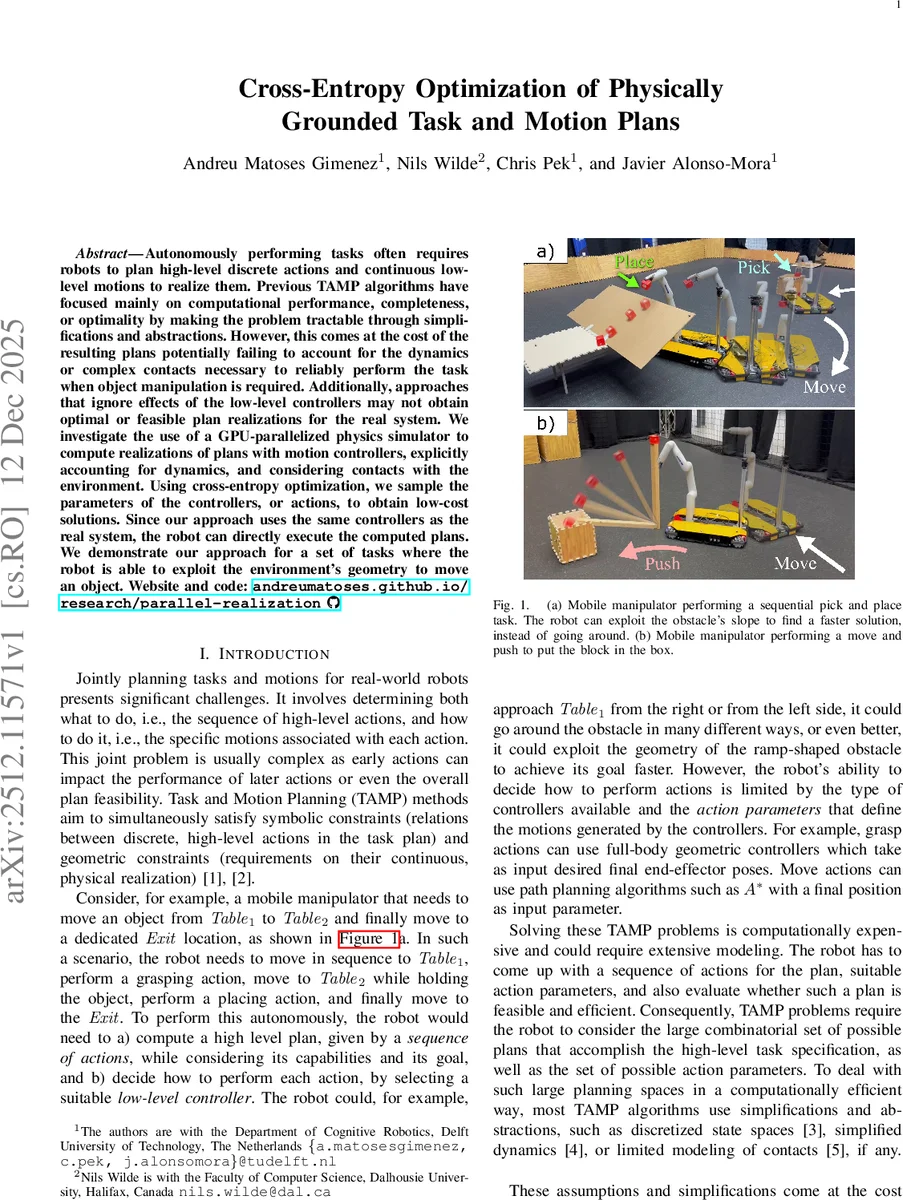
The effectiveness of this approach is demonstrated through tasks that require the robot to exploit environmental geometry. For instance, the robot can use surrounding objects or surfaces as supports to manipulate target objects, a feat that requires precise modeling of contact and friction. By treating physical interactions not as obstacles to be avoided, but as tools to be utilized, this research paves the way for more robust and capable autonomous agents capable of performing complex manipulation tasks in unstructured, real-world environments.
Comments & Academic Discussion
Loading comments...
Leave a Comment