Geometry-Informed Neural Operator Transformer
Machine-learning-based surrogate models offer significant computational efficiency and faster simulations compared to traditional numerical methods, especially for problems requiring repeated evaluations of partial differential equations. This work introduces the Geometry-Informed Neural Operator Transformer (GINOT), which integrates the transformer architecture with the neural operator framework to enable forward predictions on arbitrary geometries. GINOT employs a sampling and grouping strategy together with an attention mechanism to encode surface point clouds that are unordered, exhibit non-uniform point densities, and contain varying numbers of points for different geometries. The geometry information is seamlessly integrated with query points in the solution decoder through the attention mechanism. The performance of GINOT is validated on multiple challenging datasets, showcasing its high accuracy and strong generalization capabilities for complex and arbitrary 2D and 3D geometries.
💡 Research Summary
This paper introduces the Geometry-Informed Neural Operator Transformer (GINOT), a novel machine learning-based surrogate model designed for rapid and accurate solution of partial differential equations (PDEs) on arbitrary and complex geometries. Surrogate models are crucial for tasks requiring numerous PDE evaluations, such as design optimization and uncertainty quantification, where traditional numerical methods like finite element analysis are computationally prohibitive.
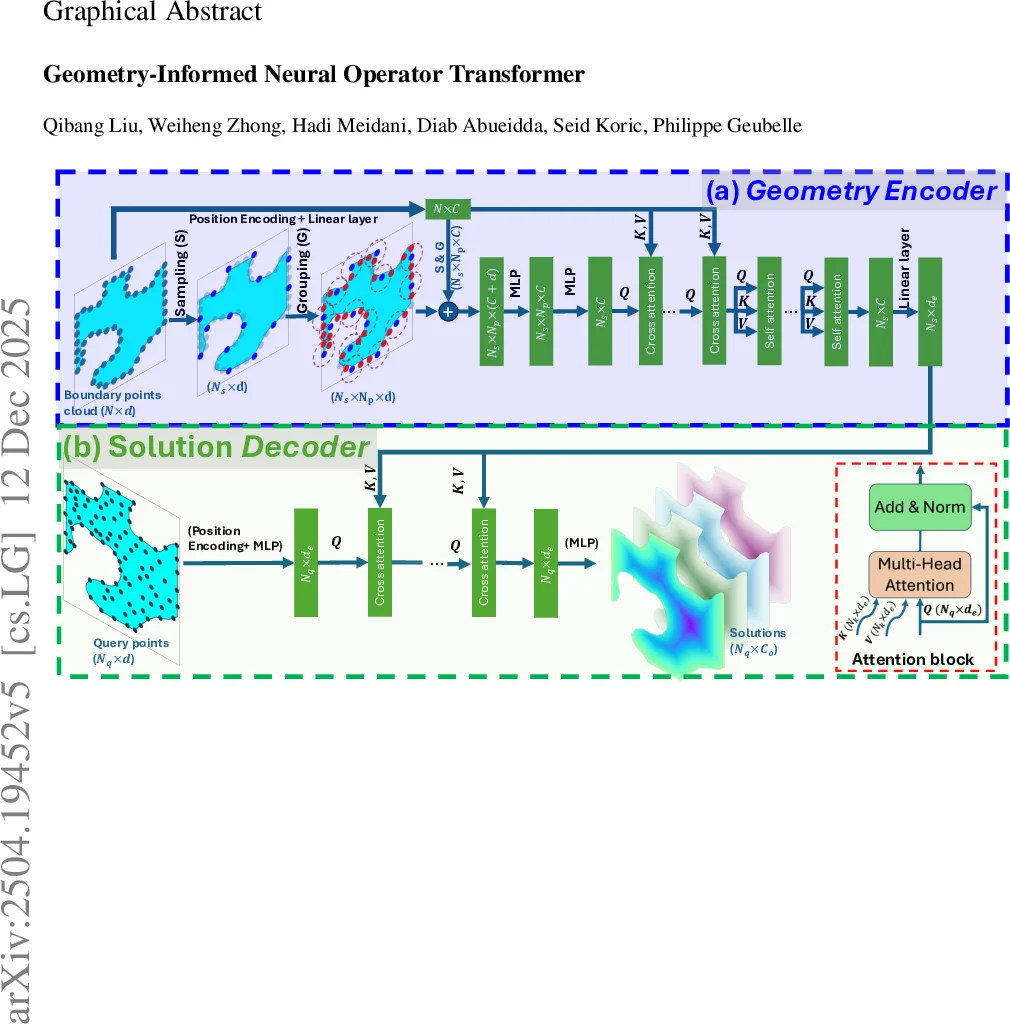
GINOT’s innovation lies in its integration of the Transformer architecture with the neural operator framework, specifically tailored to handle geometry represented as unstructured point clouds. The model addresses three key challenges of point cloud data: permutation invariance, non-uniform point density, and variable number of points across different shapes. The architecture consists of two main components: a Geometry Encoder and a Solution Decoder.
The Geometry Encoder processes the input boundary point cloud. It first employs sampling (using the iterative Farthest Point Sampling algorithm) and grouping (selecting points within a radius around each sampled centroid) layers, inspired by PointNet++, to extract local geometric features. These local features then interact with global features obtained from a positional encoding of the entire point cloud through a cross-attention mechanism. This process outputs the Key and Value matrices for the subsequent attention operations. A masking mechanism ensures that padded points (used to standardize batch sizes for variable-length inputs) do not influence the encoding.
The Solution Decoder takes query points (spatial locations where the solution is desired) as input. These points are transformed into a Query matrix via positional encoding and an MLP. This Query then performs cross-attention with the Key and Value matrices produced by the Geometry Encoder. The attention mechanism allows each query point to dynamically focus on the most relevant parts of the geometric information from the entire shape, enabling accurate prediction of the physical field (e.g., stress, displacement) at arbitrary locations.
The authors validate GINOT on several challenging 2D and 3D benchmark datasets involving solid mechanics problems. Results demonstrate that GINOT achieves high predictive accuracy and exhibits strong generalization capabilities to unseen, complex geometries. A significant advantage highlighted is that GINOT does not require a Signed Distance Function (SDF) for geometry representation. Calculating SDFs can be computationally expensive for intricate 3D shapes, making GINOT a more efficient choice compared to SDF-based neural operators like Geo-FNO or GI-FNO. The paper concludes that GINOT provides a powerful, flexible, and efficient framework for forward simulation on arbitrary geometries, with direct applicability to real-world engineering analysis and design cycles.
Comments & Academic Discussion
Loading comments...
Leave a Comment