Lies We Can Trust: Quantifying Action Uncertainty with Inaccurate Stochastic Dynamics through Conformalized Nonholonomic Lie Groups
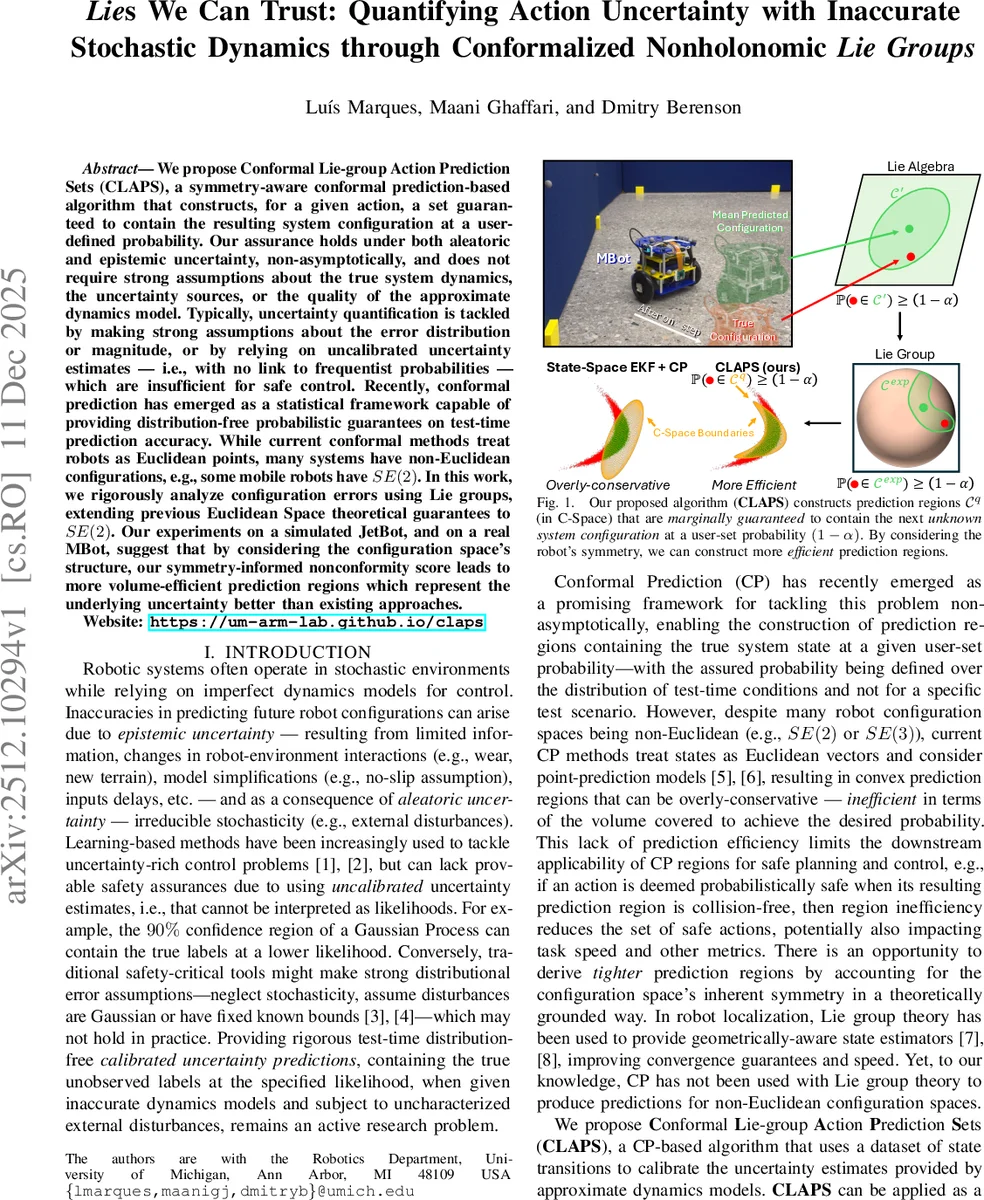
We propose Conformal Lie-group Action Prediction Sets (CLAPS), a symmetry-aware conformal prediction-based algorithm that constructs, for a given action, a set guaranteed to contain the resulting system configuration at a user-defined probability. Our assurance holds under both aleatoric and epistemic uncertainty, non-asymptotically, and does not require strong assumptions about the true system dynamics, the uncertainty sources, or the quality of the approximate dynamics model. Typically, uncertainty quantification is tackled by making strong assumptions about the error distribution or magnitude, or by relying on uncalibrated uncertainty estimates - i.e., with no link to frequentist probabilities - which are insufficient for safe control. Recently, conformal prediction has emerged as a statistical framework capable of providing distribution-free probabilistic guarantees on test-time prediction accuracy. While current conformal methods treat robots as Euclidean points, many systems have non-Euclidean configurations, e.g., some mobile robots have SE(2). In this work, we rigorously analyze configuration errors using Lie groups, extending previous Euclidean Space theoretical guarantees to SE(2). Our experiments on a simulated JetBot, and on a real MBot, suggest that by considering the configuration space’s structure, our symmetry-informed nonconformity score leads to more volume-efficient prediction regions which represent the underlying uncertainty better than existing approaches.
💡 Research Summary
This paper introduces Conformal Lie-group Action Prediction Sets (CLAPS), a novel algorithm for quantifying action-conditioned prediction uncertainty in robotic systems with inaccurate and stochastic dynamics. The core challenge addressed is providing rigorous, distribution-free probabilistic guarantees about a robot’s future configuration after executing an action, without relying on strong assumptions about disturbance distributions or model fidelity. This is crucial for safety-critical control.
The authors bridge two advanced frameworks: Conformal Prediction (CP) and Lie Group theory. CP is a statistical method that uses a calibration dataset to provide marginal coverage guarantees, i.e., the true future state will lie within a predicted set with a user-specified probability (1-α), on average over test scenarios. However, prior CP applications in robotics treat the robot’s state as a Euclidean vector, which is geometrically incorrect for systems like mobile robots whose configuration space is the non-Euclidean Lie group SE(2) (encoding position and orientation). This leads to overly conservative and volume-inefficient prediction regions, often convex ellipsoids, which limit their utility for downstream tasks like safe planning.
CLAPS solves this by making the CP procedure “symmetry-aware.” The key technical contributions are: 1) A rigorous presentation of how to model nonholonomic dynamical systems (e.g., wheeled robots) on matrix Lie groups using Lagrangian mechanics and the Euler-Poincaré-Suslov equations, accounting for inertia and motion constraints. 2) The design of a new nonconformity score based on Lie group theory. Instead of using vector differences, the error between a predicted and true configuration is measured in the Lie algebra using exponential coordinates (via the logarithm map). This score respects the multiplicative structure of the group, correctly coupling rotational uncertainty into translational uncertainty. 3) An algorithm that takes an approximate dynamics model (providing a mean and Gaussian-like covariance prediction) and a calibration dataset of state transitions, and outputs a calibrated prediction set in the configuration space (e.g., SE(2)) that is guaranteed to contain the true next configuration with probability at least (1-α).
The method operates as a post-hoc calibration layer. It computes the proposed Lie-based nonconformity scores for the calibration data, finds the appropriate quantile of these scores, and uses this quantile as a threshold to construct the prediction set for new actions. The resulting sets are provably valid under the exchangeability assumption of the calibration and test data.
Experiments on a simulated JetBot and a real MBot differential-drive robot demonstrate CLAPS’s efficacy. Compared to a Euclidean CP baseline and a state-space Extended Kalman Filter plus CP approach, CLAPS generates prediction regions that are significantly more volume-efficient while maintaining the same statistical coverage guarantee. This means the sets are tighter and better represent the underlying uncertainty geometry, which is non-convex and wraps around the orientation dimension. This increased efficiency can directly translate to a larger set of probabilistically safe actions available to a planner or controller, enhancing overall system performance. The work opens a promising direction for incorporating geometric structure into uncertainty quantification for safer and more capable robots.
Comments & Academic Discussion
Loading comments...
Leave a Comment