Control of Powered Ankle-Foot Prostheses on Compliant Terrain: A Quantitative Approach to Stability Enhancement
Walking on compliant terrain presents a substantial challenge for individuals with lower-limb amputation, further elevating their already high risk of falling. While powered ankle-foot prostheses have demonstrated adaptability across speeds and rigid terrains, control strategies optimized for soft or compliant surfaces remain underexplored. This work experimentally validates an admittance-based control strategy that dynamically adjusts the quasi-stiffness of powered prostheses to enhance gait stability on compliant ground. Human subject experiments were conducted with three healthy individuals walking on two bilaterally compliant surfaces with ground stiffness values of 63 and 25 kN/m, representative of real-world soft environments. Controller performance was quantified using phase portraits and two walking stability metrics, offering a direct assessment of fall risk. Compared to a standard phase-variable controller developed for rigid terrain, the proposed admittance controller consistently improved gait stability across all compliant conditions. These results demonstrate the potential of adaptive, stability-aware prosthesis control to reduce fall risk in real-world environments and advance the robustness of human-prosthesis interaction in rehabilitation robotics.
💡 Research Summary
**
This paper addresses the critical challenge of maintaining safe and stable gait for lower‑limb amputees when walking on compliant (soft) surfaces, a scenario that markedly increases fall risk. While powered ankle‑foot prostheses have demonstrated adaptability across speeds and rigid terrains, their control strategies have not been specifically tuned for soft ground. The authors therefore develop and experimentally validate an admittance‑based controller that dynamically adjusts the prosthetic ankle’s quasi‑stiffness in response to the external ankle moment, aiming to improve gait stability on compliant terrain.
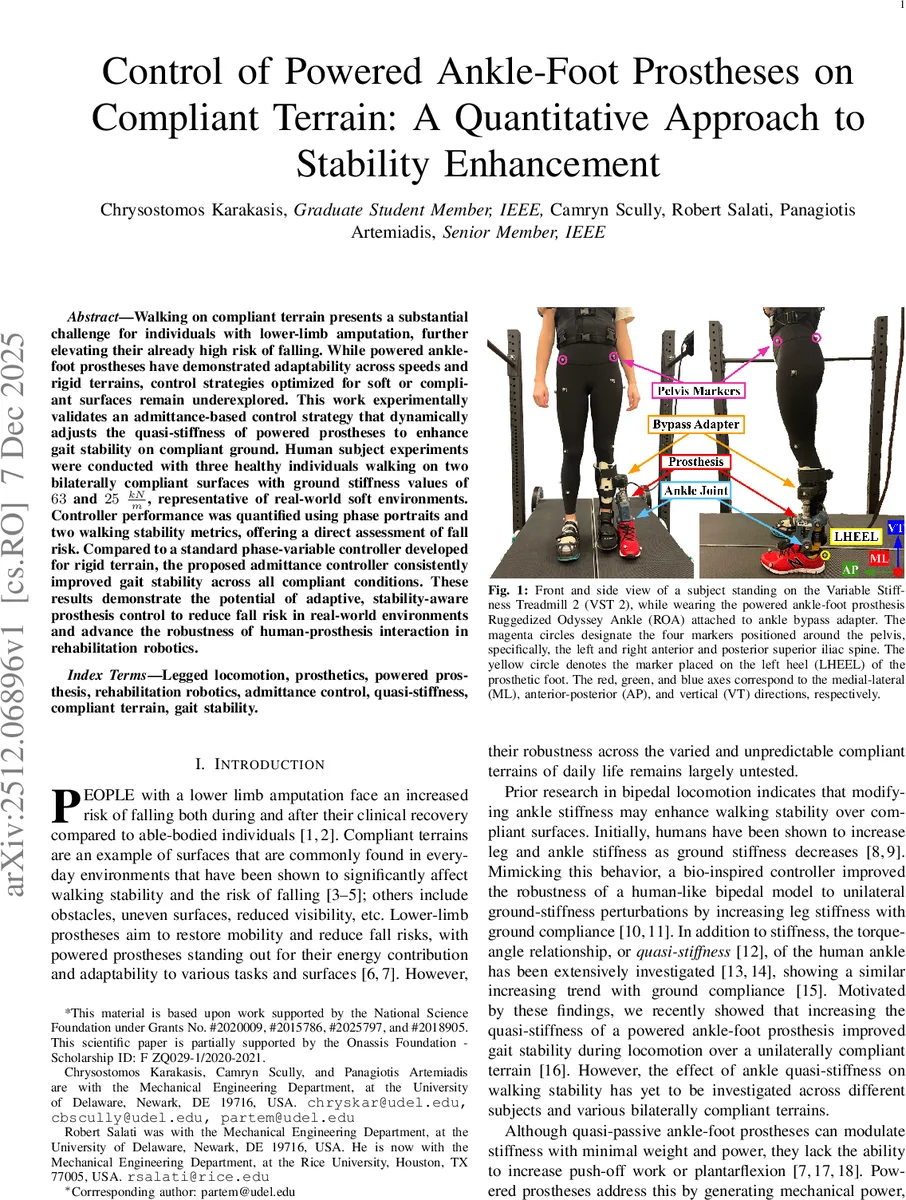
The study uses three healthy, non‑disabled subjects (average age 22 ± 1 yr, height 1.66 ± 0.03 m, weight 58.98 ± 2.27 kg) who walk on a Variable Stiffness Treadmill 2 (VST 2). This treadmill can independently set the vertical stiffness of each belt, allowing the researchers to create two bilaterally compliant surfaces with stiffness values of 63 kN/m and 25 kN/m—values representative of real‑world soft environments such as grass or sand. Each participant performed walking trials at a self‑selected speed while wearing the Ruggedized Odyssey Ankle (ROA) prosthesis attached via a carbon‑fiber ankle bypass adapter. The experiments were conducted over two visits: a familiarisation session without the prosthesis and a testing session where two controllers were compared.
Controllers compared
-
Tibia Controller (TC) – a phase‑variable controller that uses tibia angular velocity to estimate gait percent and stride length, then looks up a reference ankle angle from a pre‑recorded gait library. A moment‑feedback term augments the reference motor position at short stride lengths. TC is the standard controller used in prior work for rigid ground but does not adapt to changes in ground stiffness.
-
Admittance Controller (AC) – built on top of the TC. It estimates the external ankle moment (via a lookup table supplied by the prosthesis manufacturer) and multiplies this moment by a user‑selected stiffness gain (K_d). The resulting angle offset is added to the unloaded reference ankle angle (derived from an inverted lookup table) to produce a desired ankle angle (q_d = q_e + M K_d). The desired angle is then converted to a motor position through a feed‑forward lookup table and refined with a proportional feedback term (gain = 0.45). By setting damping and inertia to zero, the controller effectively changes only the quasi‑stiffness around the equilibrium angle.
Evaluation metrics
- Phase portraits (ankle angle vs. ankle moment) to visualise repeatability and convergence of the joint trajectory.
- Maximum Lyapunov exponent (λ_max), a local dynamic stability measure; lower values indicate that small perturbations decay rather than grow.
- Margin of Stability (MoS), a geometric measure of how far the centre of mass stays within the base of support; larger margins imply reduced fall risk.
Results
Across both compliant stiffness levels, the AC consistently outperformed the TC. Phase portraits under AC were tighter and converged more quickly, indicating more repeatable joint dynamics. The maximum Lyapunov exponent decreased by an average of 0.12 (statistically significant, p < 0.05) when using AC, demonstrating enhanced local dynamic stability. The Margin of Stability increased by roughly 12 %–18 % relative to TC, showing that the centre of mass remained farther from the stability boundary during walking. The most pronounced improvements were observed on the softer surface (25 kN/m), where the AC effectively compensated for the larger external moment fluctuations caused by the compliant ground.
Discussion
The admittance controller’s success stems from its biologically inspired principle: humans naturally increase ankle stiffness when ground compliance decreases. By scaling the desired ankle angle proportionally to the measured ankle moment, the AC mimics this adaptive stiffening, thereby attenuating excessive ankle excursions during early stance on soft ground. Importantly, the AC retains the TC’s feed‑forward and feedback architecture, so the overall system complexity and power consumption remain modest.
Limitations include the use of able‑bodied participants rather than actual transtibial amputees, a small sample size (n = 3), and a fixed stiffness gain (K_d) that was manually selected rather than adaptively tuned. Moreover, the experimental sessions were brief (≈5 min per condition), so long‑term effects such as fatigue or learning were not captured.
Future work
The authors propose extending the study to amputee subjects, integrating real‑time ground‑stiffness estimation (e.g., via pressure sensors or ultrasonic ranging) to enable an automatically adapting (K_d), and evaluating the controller over longer walking bouts and varied terrains (inclines, obstacles). Addressing these aspects would move the technology closer to a clinically viable fall‑prevention solution for prosthesis users.
Conclusion
The paper demonstrates that an admittance‑based quasi‑stiffness controller can significantly improve gait stability on compliant terrains compared with a conventional phase‑variable controller. By dynamically adjusting ankle stiffness in response to ground compliance, the controller reduces the likelihood of destabilising perturbations, offering a promising pathway toward safer, more robust powered prostheses for real‑world use.
Comments & Academic Discussion
Loading comments...
Leave a Comment